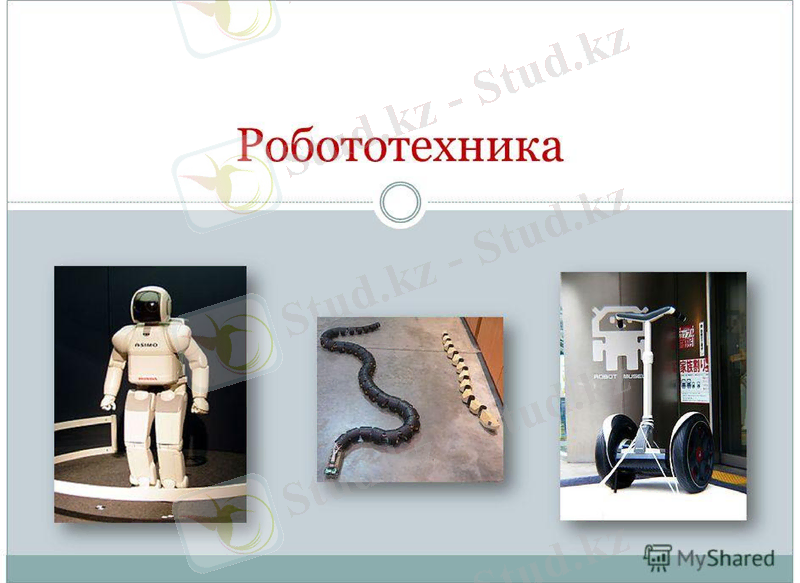
Робототехника: тарихы, құрылымы, жылжу жүйелері және автономды навигация



Роботтардың ең басты таптары
Әр робот механикалық негізі - құрылғы, рамадан тұрады.
Әр робот электр бөлшектерден тұрады.
Барлық роботтар кішкене болса да компьютер кодын керек етеді.

Робототехника тарихы
1942 жылы ғылыми-фантастикалық мәнерде жазатын жазушы Айзек Азимов робототехниканың үш заңын ойлап табады. 1948 жылы Норберт Винер тәжірибелік робототехниканың негізін құрайтын кибернетиканың қағидаларын тұжырымдаған. Толығымен автономды роботтар XX ғасырдың екінші жартысында ғана пайда болды. Ең бірінші сандық басқаруы бар бағдарламанатын робот Unimate болған. Ол робот ыстық темір бөлшектерді балқыту машинасынан көтеріп, жинауға арналған. Қазіргі таңда коммерциялық және индустриалдық роботтар кеңінен тараған.
Этимологиясы
«Робототехника» (немесе «роботика», «robotics») сөзі ең бірінші рет Айзек Азимовтың 1941 жылы жарық көрген ғылыми-фантастикалық «Жалғаншы» («Лжец») атты әңгімесінде қолданылған.
«Робототехника» сөзінің негізін қалайтын «робот» сөзін 1920 жылы Карел Чапек деген чехиялық жазушы алғаш болып ойлап тауып, өзінің 1921 жылы қойылып, көрермендердің ілтипатына ие болған ғылыми-фантастикалық «Р. У. Р. » («Россумские универсальные роботы») атты пьесында қолданған. Сол пьесада зауыт бастығы адамдарға ұқсас роботтарды ойлап табады да, тоқтатпай жұмыс істетеді. Басында андроидтар адамды мінсіз тыңдап, жұмыс істейді, алайда кейіннен қарсы шығып, өз жаратушыларын жояды.

Роботтардың жылжу түрлері
Теңгеру роботтары әдетте гироскоп қолданады. Гироскоп арқылы робот қаншалықты тез және қай жағына қарай құлап жатқанын анықтап, дөңгелегін құлап жатқан жаққа қарай айдайды. Сонда робот ішіндегі төңкерілген маятниктің динамикасына байланысты секундына жүздеген рет жиілігімен теңгеруге тырысады. Робот деп автоматтандырылған құрылғы ретінде қарастырсақ, Segway робот емес, қарапайым роботтың мобилді платформасы RMP (Robotic Mobility Platform) ретінде қабылдауға болады. Мысал ретінде NASA-ның Robonaut роботын қарастырсақ, робот Segway платформасына құрастырылғанын байқаймыз.

Роботтардың жылжу түрлері
Тура жүру үдерісі қиын және динамикалық мәселе. Бірнеше роботтар адам сынды екі аяқтап жүре алады, алайда олардың біреуі де адам сияқты аяғын нық баса алмайды. Адамның жүру қабілеті туралы көптеген зерттеулер жүргізілді, солардың бірі 2008 жылы Texas A&M Университетінде ашылған AMBER лабораториясында. Басқа роботтар екі аяқтан көбірек болып құрастырылды. Екі аяқты роботқа қарағанда аяқтары көбірек болғанымен ол роботтардың құрастыруы жеңілрек болатын. Сол себептен екі аяқтан көбірек, бірақ тура жүре алатын роботтарды құрастыра бастады.

Роботтардың жылжу түрлері
Ал шынжыр табанды роботтар одан сайын жақсы тартым береді. Шынжырлы жылжу механизмі өзін жүрген кезде жүздеген дөңгелектен жасалған сынды ұстайды. Сол себептен сыртқы жерлерде өз қолданысын тапты. Көбінесе қолданылатын салалырдың бірі - әскери сала. Әскери операциялар көбінесе сыртта өтеді, қарапайым дөңгелекпен жетуге қиын жерлерде шынжыр табанды робот оңай жете алады. Алайда, үйдің ішіндегі палас, немесе тегіс жерлерде роботтың бұл түрін қолдану қиындау болмақ. Осы түріне жататын роботтардың бірі - NASA-ның Urbie атты қалалық роботы. [

Жылжудың басқа түрлері
Ұшу
Жалпы айтқанды қазіргі жолаушылар ұшағы екі адамға бағынатын ұшатын робот. Ұшақтардың автопилоттары қосылу тұрса, компьютер ұшақты саяхат бойы толығымен (жерден ұшу, ауада ұшу мен қону) басқара алады. Ұша алатын роботтардың басқа түрі ұшақышсыз ұшақтар, басқа аты unmanned aerial vehicles (UAVs) . Ол ұшықта адамдар болмайды, сол себептен кәдімгі ұшақтарға қарағанда кішірек, жеңілірек болады.

Жылжудың басқа түрлері
Иірілген қимылдар
Бірнеше жылан сынды роботтар істеп шығарылған. Сол роботтар жылан қимылын еліктеп, шектелген жерлерге жете алады. Сол себептен, бір күні жылан сияқты роботтар бұзылған ғимараттардың астарынан адам іздеуге көмектеседі. Жапондық ACM-R5 жылан роботы жермен ғана қоймай суда да жүзе алады.
Қорытынды
Қазіргі кездегі роботтардың көбісі адамның бұйрақтарымен жұмыс істейді, немесе бір орында қозғалыссыз істейді. Оған қарамастан адамзат динамикалық ортада автономды түрде жұмыс істей алатын роботтарға қызығушылықтарын арттырып жатыр. Сол роботтарға қоршаған ортада кедергісіз жүру үшін навигация керек. Егер күтпеген жағдайлар (мысалы адамдар мен басқа заттар бір орында тұрмай, жылжитын болса) туындаса робот соғысып мәселе туғызуы мүмкін. ASIMO және Meinü robot сынды жоғары дамыған роботтардың навигация жүйелері де мықты. Өзін - өзі бақылай алатын, немесе Ernst Dickmanns-ның жүргізушісіз автокөліктері қоршаған ортаны сезіп, навигация бойынша шешімдерді көліктің өзі қабылдай алады. Сондай роботтардың көбісі жол нүктелердің арасында шарлау үшін GPS-ті radar, кейбір кездерде lidar сынды сенсорлармен, video cameras және инерциялық бағдар жүйелерімен қоса қолданады.
Назарларыңызға рахмет!!!
- Іс жүргізу
- Автоматтандыру, Техника
- Алғашқы әскери дайындық
- Астрономия
- Ауыл шаруашылығы
- Банк ісі
- Бизнесті бағалау
- Биология
- Бухгалтерлік іс
- Валеология
- Ветеринария
- География
- Геология, Геофизика, Геодезия
- Дін
- Ет, сүт, шарап өнімдері
- Жалпы тарих
- Жер кадастрі, Жылжымайтын мүлік
- Журналистика
- Информатика
- Кеден ісі
- Маркетинг
- Математика, Геометрия
- Медицина
- Мемлекеттік басқару
- Менеджмент
- Мұнай, Газ
- Мұрағат ісі
- Мәдениеттану
- ОБЖ (Основы безопасности жизнедеятельности)
- Педагогика
- Полиграфия
- Психология
- Салық
- Саясаттану
- Сақтандыру
- Сертификаттау, стандарттау
- Социология, Демография
- Спорт
- Статистика
- Тілтану, Филология
- Тарихи тұлғалар
- Тау-кен ісі
- Транспорт
- Туризм
- Физика
- Философия
- Халықаралық қатынастар
- Химия
- Экология, Қоршаған ортаны қорғау
- Экономика
- Экономикалық география
- Электротехника
- Қазақстан тарихы
- Қаржы
- Құрылыс
- Құқық, Криминалистика
- Әдебиет
- Өнер, музыка
- Өнеркәсіп, Өндіріс
Қазақ тілінде жазылған рефераттар, курстық жұмыстар, дипломдық жұмыстар бойынша біздің қор #1 болып табылады.

Ақпарат
Қосымша
Email: info@stud.kz