Өнеркәсіптік роботтың жетек басқару жүйесін жобалау мен электр жетегін модельдеу

ҚАЗАҚСТАН РЕСПУБЛИКАСЫ БІЛІМ ЖӘНЕ ҒЫЛЫМ МИНИСТРЛІГІ Қ. И. Сәтбаев атындағы қазақ ұлттық техникалық университеті Автоматика және телекомуникация институты
РТ және АТҚ кафедрасы
Дипломдық жұмыс
Тақырыбы: «Өндірістік роботтың жетек басқару жүйесін жобалау»
Жетекші: аға оқытушы Б. Қ. Құсайынов
Орындаған: Сарсекова Галия Нурбулатовна
ПСб-05-М1к тобы
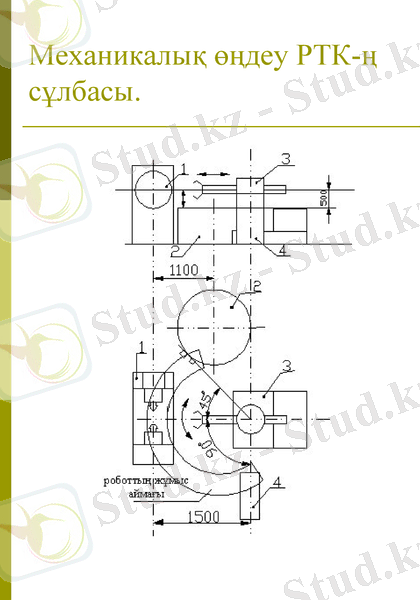
Механикалық өңдеу РТК-ң сұлбасы.
Роботтың өндірістік қозғалыстарының уақыт диаграммасы
Дайындамамен қоректендіру құрылғысына бұрылу
Дайындамамен қоректендіру құрылғысына қол созу
Дайындамамен қоректендіру құрылғысынан дайындаманы алу
Қолды кері тарту
Станокқа бұрылу
Станоктың жұмыс аймағына қол созу
Дайындаманы станоктың тетігіне салу
Станоктың жұмыс аймағынан қол тарту
tж =24с
А)
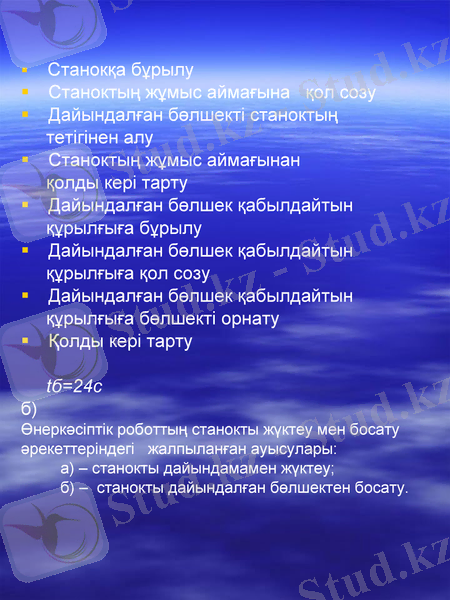
Станокқа бұрылу
Станоктың жұмыс аймағына қол созу
Дайындалған бөлшекті станоктың
тетігінен алу
Станоктың жұмыс аймағынан
қолды кері тарту
Дайындалған бөлшек қабылдайтын
құрылғыға бұрылу
Дайындалған бөлшек қабылдайтын
құрылғыға қол созу
Дайындалған бөлшек қабылдайтын
құрылғыға бөлшекті орнату
Қолды кері тарту
tб=24с
б)
Өнеркәсіптік роботтың станокты жүктеу мен босату
әрекеттеріндегі жалпыланған ауысулары:
а) - станокты дайындамамен жүктеу;
б) - станокты дайындалған бөлшектен босату.
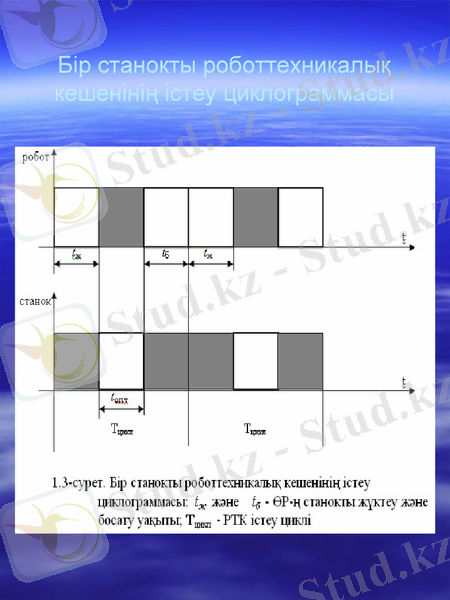
Бір станокты роботтехникалық кешенінің істеу циклограммасы
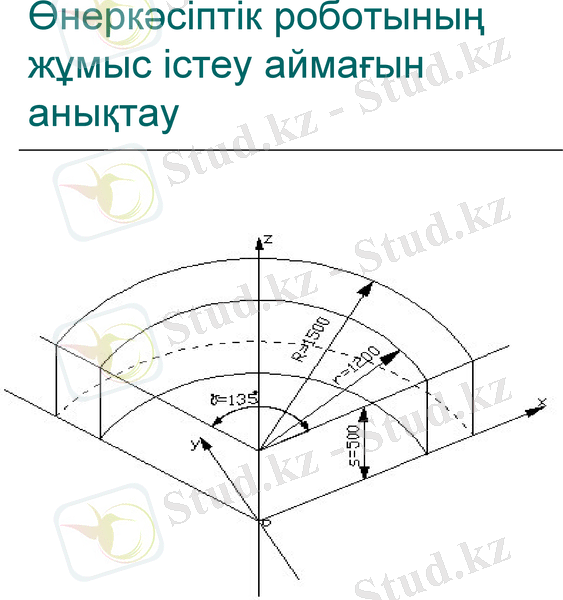
Өнеркәсіптік роботының жұмыс істеу аймағын анықтау
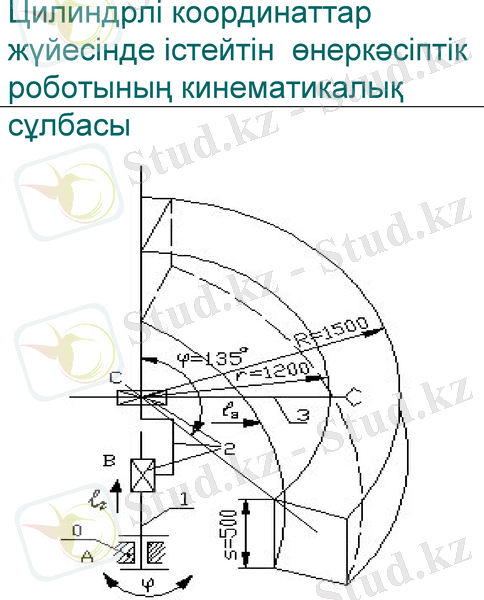
Цилиндрлі координаттар жүйесінде істейтін өнеркәсіптік роботының кинематикалық сұлбасы
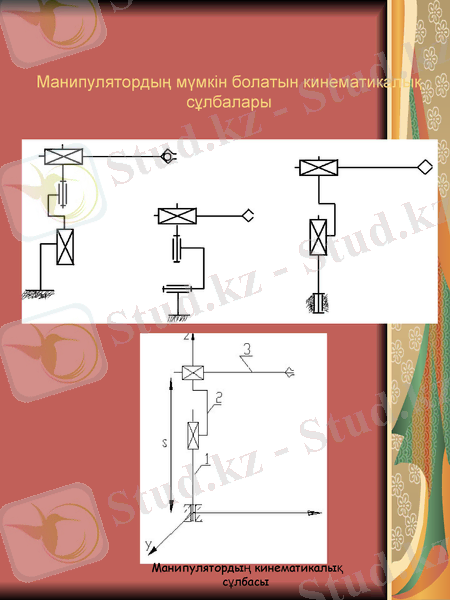
Манипулятордың мүмкін болатын кинематикалық сұлбалары
Манипулятордың кинематикалық сұлбасы

Өнеркәсіптік роботының сұлбасын кинетостатикалық (күштілік) есептеу
.
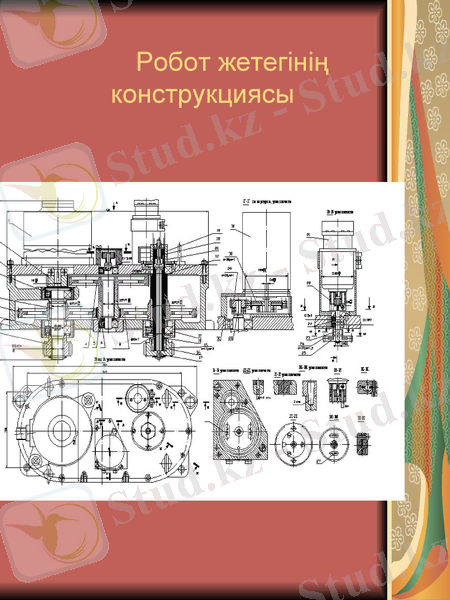
Робот жетегінің конструкциясы
Универсал 5. 02 роботы Техникалық характеристикалары:
1. Жүк көтерімдігі, кг 5
2. Қозғалыс дәрежесінің саны 6
3. Ең үлкен орын ауыстыру мәні :
вертикаль ось айналымында I-I, град 340
ось бойында I-I, мм 400
горизонталь ось бойында III-III, мм 630
вертикаль ось айналымында II-II, град 240
ось айналымында III-III, град 180
ось айналымында IV-IV, град 180
4. Ең үлкен жылдамдық :
ось айналымында I-I бұрылуда, град/с 84
ось бойында, қол жүрісінің вертикальдығында I-I, м/с…0, 27
ось бойында, қолдың (алға) қозғалысы III-III, м/с 1, 08
ось бойында, қол бұрылымы II-II, град/с 132
5. Позицициялау нақтылығы 1
6. Масса (басқару құрылғысымен бірге), 690
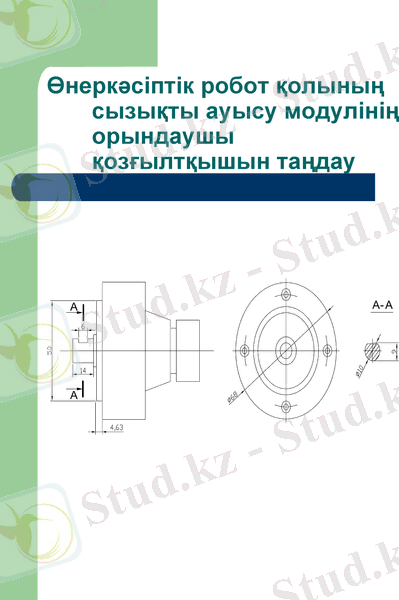
Өнеркәсіптік робот қолының сызықты ауысу модулінің орындаушы қозғылтқышын таңдау
Тұрақты ток тахогенераторының конструкциялық сұлбасы.

Тұрақты ток қозғалтқышы негізіндегі жетектің динамикалық теңдеулері
Электрмеханикалық жетегінің құрылымы
Тұрақты ток қозғалтқышының есептеу сұлбасы
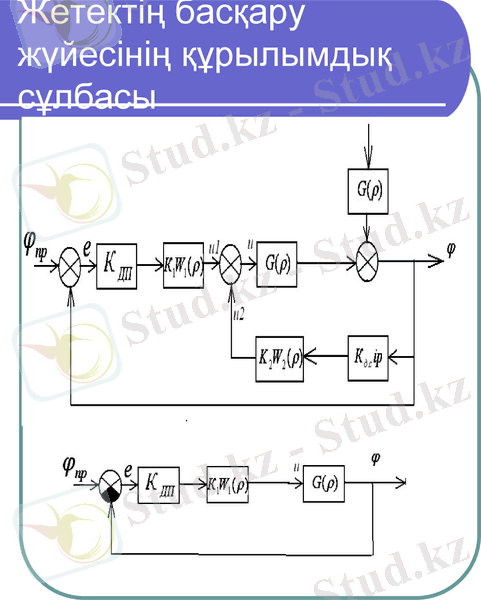
Жетектің басқару жүйесінің құрылымдық сұлбасы
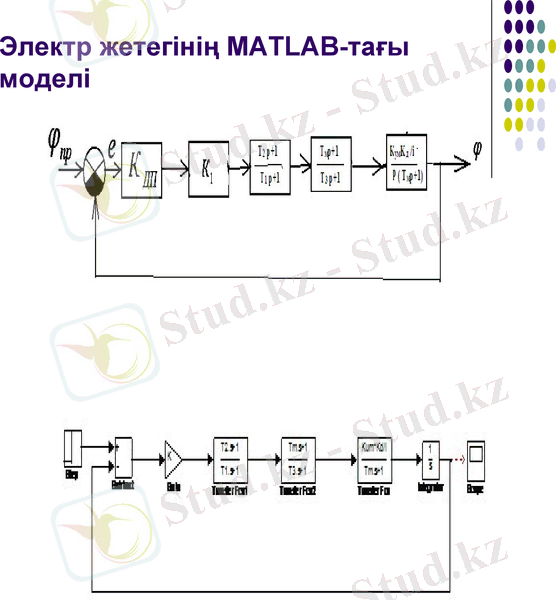
Электр жетегінің MATLAB-тағы моделі
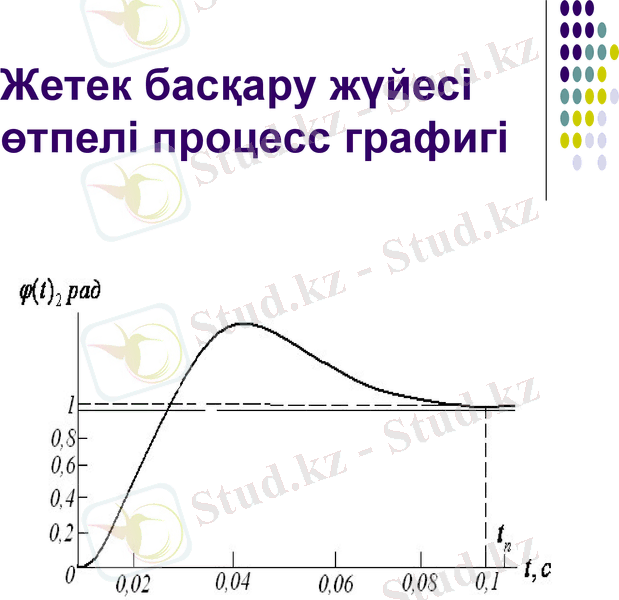
Жетек басқару жүйесі өтпелі процесс графигі
Зейін қойып
тыңдағандарыңызға
рахмет!
- Іс жүргізу
- Автоматтандыру, Техника
- Алғашқы әскери дайындық
- Астрономия
- Ауыл шаруашылығы
- Банк ісі
- Бизнесті бағалау
- Биология
- Бухгалтерлік іс
- Валеология
- Ветеринария
- География
- Геология, Геофизика, Геодезия
- Дін
- Ет, сүт, шарап өнімдері
- Жалпы тарих
- Жер кадастрі, Жылжымайтын мүлік
- Журналистика
- Информатика
- Кеден ісі
- Маркетинг
- Математика, Геометрия
- Медицина
- Мемлекеттік басқару
- Менеджмент
- Мұнай, Газ
- Мұрағат ісі
- Мәдениеттану
- ОБЖ (Основы безопасности жизнедеятельности)
- Педагогика
- Полиграфия
- Психология
- Салық
- Саясаттану
- Сақтандыру
- Сертификаттау, стандарттау
- Социология, Демография
- Спорт
- Статистика
- Тілтану, Филология
- Тарихи тұлғалар
- Тау-кен ісі
- Транспорт
- Туризм
- Физика
- Философия
- Халықаралық қатынастар
- Химия
- Экология, Қоршаған ортаны қорғау
- Экономика
- Экономикалық география
- Электротехника
- Қазақстан тарихы
- Қаржы
- Құрылыс
- Құқық, Криминалистика
- Әдебиет
- Өнер, музыка
- Өнеркәсіп, Өндіріс
Қазақ тілінде жазылған рефераттар, курстық жұмыстар, дипломдық жұмыстар бойынша біздің қор #1 болып табылады.

Ақпарат
Қосымша
Email: info@stud.kz