Лазерлік сканерлеу технологиясы және оның әуе, мультиплатформалық, дрондық және мультиспектралдық қолданбалары

Лазерлік сканерлеу технологиясы және пайдалану бойынша жалпы малиметтер
Орындаған: Абуова Н.
Тексерген: Джуламанов Т. Д.
ҚАЗАҚСТАН РЕСПУБЛИКАСЫНЫҢ БІЛІМ ЖӘНЕ ҒЫЛЫМ МИНИСТРЛІГІ
АЛЬ-ФАРАБИ АТЫНДАҒЫ ҚАЗАҚ ҰЛТТЫҚ УНИВЕРСИТЕТІ
Факультеті:«География және табиғатты пайдалану»
Кафедрасы:«Картография және геоинформатика»
Жоспар:
Лазерлік сканерлеу технологиясы
Әуе лазерлік сканерлеу
Мультиплатформ лазерлік сканерлеу
Дрондар және лазерлік сканерлеу
Мультиспектралық сенсорлар-түсті лазерлік сканерлеу
Лазерлік сканерлеу технологиясы
Лазерлік сканерлеу тікелей үш өлшемді өлшемдерде объект туралы ақпаратты жинау үшін оптикалық бағытталған лазерлік сәулелерді пайдалануға негізделген. Бұл жүйе траекториясын сенімді және дәл жасауға мүмкіндік береді (яғни жағдай мен бағдар) . 1990 жылдардың ортасына дейін GNSS-IMU технологиясы коммерциялық пайдалану үшін қолжетімсіз болды. Содан бері құрылғылар нарығы, әсіресе талшықты-оптикалық гироскоптар (FOG) және жүйелер (MEMS) технологиясының дамуымен жарылған. Сонымен қатар, GNSS базалық станцияларының жалпыұлттық желілерін өсіру геодезия және картография саласындағы лазерлік сканерлердің барлық алуан түрлерінде жетістігіне ықпал етті.
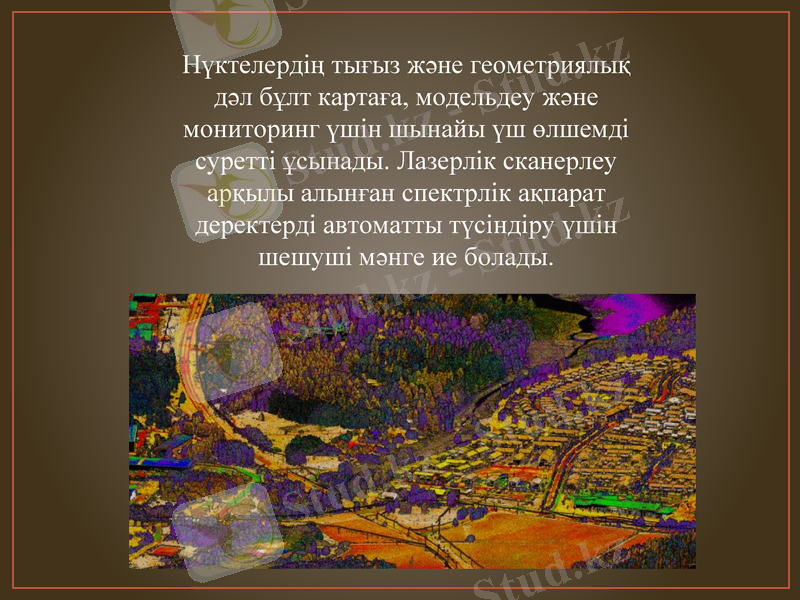
Нүктелердің тығыз және геометриялық дәл бұлт картаға, модельдеу және мониторинг үшін шынайы үш өлшемді суретті ұсынады. Лазерлік сканерлеу арқылы алынған спектрлік ақпарат деректерді автоматты түсіндіру үшін шешуші мәнге ие болады.
Дегенмен, ғарыштан лазерлік сканерлеу үшін бұл орбитадан жер бетіне жету үшін қажетті шамадан тыс қуатқа байланысты, Оптикалық компоненттерге жылудың жойғыш әсеріне байланысты проблемалы болып шықты. Жаңа дамып келе жатқан технология оптикаға түсетін жүктемені төмендетіп, энергияны бірфотонды деңгейде жинау болып табылады. Нарықта қол жетімді кейбір бірфотонды құрылғылар сезімтал детектив рұқсат етілген үлкен биіктіктен деректерді алудың жоғары тиімділігін уәде етеді.
Екінші жағынан, бұлттылық тәжірибеде әлеуетті толық ашу үшін шектерді белгілейді. Детектор әрбір қайтарылатын фотонды емес, оның орнына детектор үшін белгілі бір ықтималдықпен таңдап алады және басқа көздерден алынған фотондар лазерлік сканер шығаратын қосымша ретінде анықталады. Бұл стохастикалық табудың табиғаты деректерді өңдеу әдістемесінің бейімделуін талап етеді, өйткені деректер сипаттамасы мен олардың дәлдігі мен деректерді өңдеуге әсері әлі де анық емес.
Қазіргі уақытта бірфотонды детектеу үшін қолданылатын екі әдіс бар. Бір импульс үшін детектордың әрбір пиксель Гейгер Харрис режимі жүйесінде бірінші алынған фотонмен бос емес және одан тыс ешқандай деректер жиналмайды. Анықтау тиімділігі 10% - дан аз. Үлкен өлшемді детекторлар осы екі ерекшелікті өтейді, ал деректер әдетте шаршы метрге 8 немесе 32 нүктені алады. Дегенмен, өсімдік астына ену бірнеше белгісіз болып қалады. Leica SPL100 бірфотонды лазерлік сканерде пиксельге әрбір импульс үшін Фотон іске қосылған кезде детекторды үзудің қысқа уақытынан кейін бірнеше мақсаттар анықталады. Бұл әдеттегі сканерге ұқсас ену мүмкіндігін береді. Алайда, осы технологияларға қарсы барлығын анықтау үшін қосымша талдау қажет.
Әуе лазерлік сканерлеу
Ауадан топографиялық түсіру картаға түсіру үшін негізді қалыптастырады. Ақпараттық қажеттіліктер жер үсті жоспарлануын, Құрылыс және желілік инфрақұрылымдық активтер мен өзгерістерді қамтиды. Әуе лазерлік сканерлеу-бұл екі онжылдықтың өзінде бар және қоғамның, шешім қабылдайтын тұлғалардың және жерге орналастыру жөніндегі мамандардың қажеттіліктерін қанағаттандыру үшін Ұлттық картографиялық агенттіктер, муниципалитеттер мен инжинирингтік компаниялар үшін ақпарат алу үшін пайдаланылатын технология.
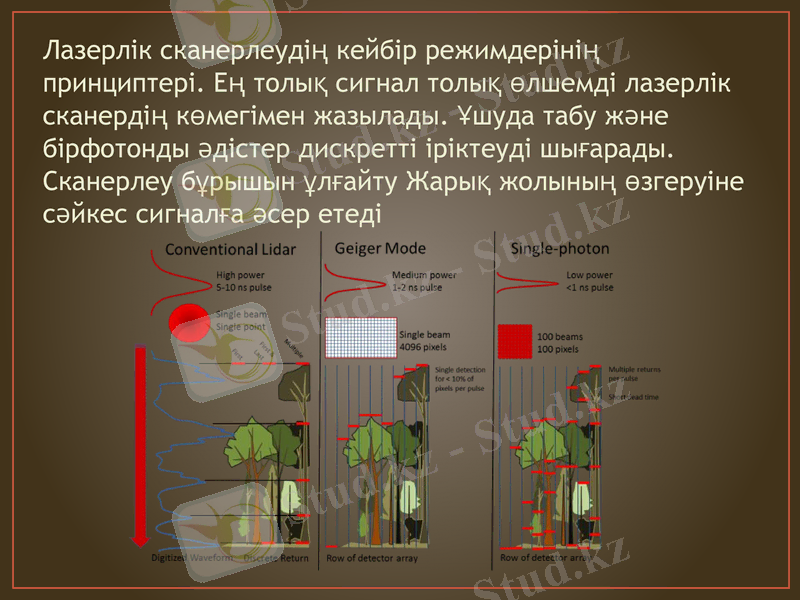
Лазерлік сканерлеудің кейбір режимдерінің принциптері. Ең толық сигнал толық өлшемді лазерлік сканердің көмегімен жазылады. Ұшуда табу және бірфотонды әдістер дискретті іріктеуді шығарады. Сканерлеу бұрышын ұлғайту Жарық жолының өзгеруіне сәйкес сигналға әсер етеді
Мультиплатформ лазерлік сканерлеу
Көлік құралында орнатылған лазерлік сканерлеу жүйесі жол жағдайы мен қалалық құрылыс салу кезінде өзінің тиімділігін дәлелдеді. Мультиплатформдық жүйелер лазерлік сканерлерді табиғи ортаны, Өнеркәсіптік қондырғыларды және қалалық аумақтарды түсіру үшін пайдалану мүмкіндігін кеңейтеді, олар көлік құралында орнатылған жүйенің көмегімен суретке түсіру үшін оңай қол жетімді бола алмайды. Бір мезгілде оқшаулауға және карталауға (SLAM) жол беретін алгоритмдерді әзірлеумен мобильді лазерлік сканерлеу жаһандық навигациялық спутниктік жүйе (GNSS) жоқ ортадан үш өлшемді деректерді ұсынуды жақсартқан, мысалы, үй-жай мен өнеркәсіптік алаңдарда.
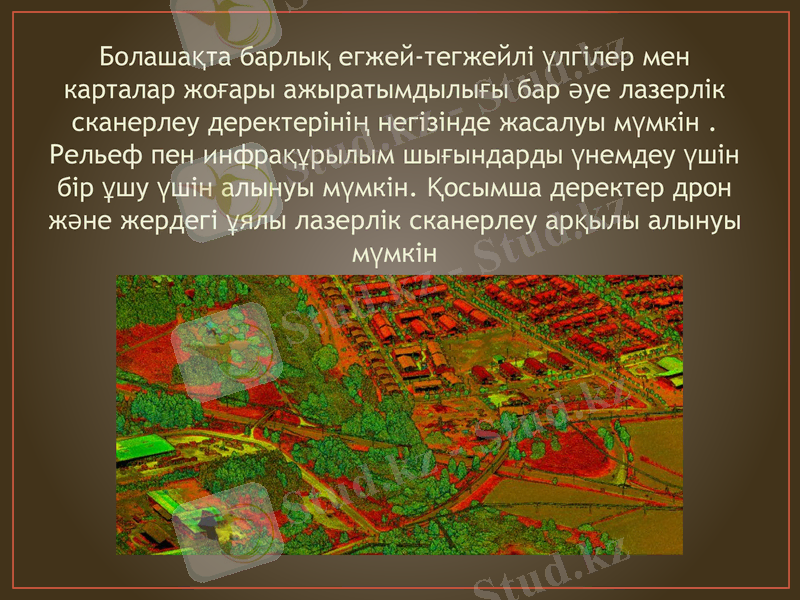
Болашақта барлық егжей-тегжейлі үлгілер мен карталар жоғары ажыратымдылығы бар әуе лазерлік сканерлеу деректерінің негізінде жасалуы мүмкін . Рельеф пен инфрақұрылым шығындарды үнемдеу үшін бір ұшу үшін алынуы мүмкін. Қосымша деректер дрон және жердегі ұялы лазерлік сканерлеу арқылы алынуы мүмкін
Дрондар және лазерлік сканерлеу
- Іс жүргізу
- Автоматтандыру, Техника
- Алғашқы әскери дайындық
- Астрономия
- Ауыл шаруашылығы
- Банк ісі
- Бизнесті бағалау
- Биология
- Бухгалтерлік іс
- Валеология
- Ветеринария
- География
- Геология, Геофизика, Геодезия
- Дін
- Ет, сүт, шарап өнімдері
- Жалпы тарих
- Жер кадастрі, Жылжымайтын мүлік
- Журналистика
- Информатика
- Кеден ісі
- Маркетинг
- Математика, Геометрия
- Медицина
- Мемлекеттік басқару
- Менеджмент
- Мұнай, Газ
- Мұрағат ісі
- Мәдениеттану
- ОБЖ (Основы безопасности жизнедеятельности)
- Педагогика
- Полиграфия
- Психология
- Салық
- Саясаттану
- Сақтандыру
- Сертификаттау, стандарттау
- Социология, Демография
- Спорт
- Статистика
- Тілтану, Филология
- Тарихи тұлғалар
- Тау-кен ісі
- Транспорт
- Туризм
- Физика
- Философия
- Халықаралық қатынастар
- Химия
- Экология, Қоршаған ортаны қорғау
- Экономика
- Экономикалық география
- Электротехника
- Қазақстан тарихы
- Қаржы
- Құрылыс
- Құқық, Криминалистика
- Әдебиет
- Өнер, музыка
- Өнеркәсіп, Өндіріс
Қазақ тілінде жазылған рефераттар, курстық жұмыстар, дипломдық жұмыстар бойынша біздің қор #1 болып табылады.

Ақпарат
Қосымша
Email: info@stud.kz