Көлік жылдамдығы деректері негізіндегі есептегіш контроллерінің басқару бағдарламасын жетілдіру

Жұмыс түрі: Курстық жұмыс
Тегін: Антиплагиат
Көлемі: 33 бет
Таңдаулыға:
Ф. 7. 14-02
ҚАЗАҚСТАН РЕСПУБЛИКАСЫ БІЛІМ ЖӘНЕ ҒЫЛЫМ МИНИСТРЛІГІ
М. о. Әуезов атындағы оңтүстік қазақстан мемлекеттік университеті
Автоматтандыру, телекоммуникация және басқару кафедрасы
КУРСТЫҚ ЖҰМЫС
Пәні Программалық қамтамасыз ету және автоматтандыру құрылғыларын программалау
Жұмыс тақырыбы: _ Көлік қозғалысының жылдамдығы туралы деректермен есептегішті қамтамасыз ететін контроллердің басқару программасын жетілдіру
Мамандығы: 050702 «Автоматтандыру және басқару»
Орындаған
(Студенттің аты-жөні, тобы)
Жетекші
(Оқытушының аты-жөні, ғылыми дәрежесі, атағы)
Жұмыс
(бағасы)
бағасына қорғалды
«___» 2011 ж.
Комиссия
қолы, аты - жөні
Норма бақылау:
қолы, аты - жөні
Шымкент 2011 ж.
Ф. 7. 14-03
М. о. Әуезов атындағы оңтүстік қазақстан мемлекеттік университеті
Автоматтандыру, телекоммуникация және басқару кафедрасы
Бекітемін
Кафедра меңгерушісі
« 03 » 09 2011 ж.
№ ТАПСЫРМАСЫ
Программалық қамтамасыз ету және автоматтандыру құрылғыларын программалау пәні бойынша курстық жұмыс
Студент
(тегі, аты - жөні)
Жұмыс тақырыбы Көлік қозғалысының жылдамдығы туралы деректермен есептегішті қамтамасыз ететін контроллердің басқару программасын жетілдіру
Бастапқы мәліметтер: . пән бойынша курстық жұмысты орындауға арналған әдістемелік нұсқаулары _
көлемі
(парақ саны)
Әдебиет:
1 SIMATIC. Система автоматизации S7-300. Данные модулей. Руководство. 650 с.
2 Аристова Н. И. Промышленные программно-аппаратные средства на российском рынке АСУТП. М. : ООО Изд-во «Научтехиздат», 2001, - 402 с.
3 В. Г. Гусев, Ю. М. Гусев - Электроника. Учебное пособие / М. ; Высшая школа, 1990 г. - 622 с.
Тапсырма берілген күні, жұмысты қорғау күні
Жұмыс жетекшісі: доцент Апсеметов А. Т .
(қызметі, тегі, аты - жөні, қолы)
Тапсырманы орындауға қабылдаған
(күні, студенттің қолы)
Аннотация
Бұл курстық жұмыста көлік қозғалысының жылдамдығы туралы деректермен есептегішті қамтамасыз ететін контроллердің басқару программасын жетілдіру жүйесі көрсетілген.
Жүйе санау, өңдеу, сөздерді құру, САТ-ке аспаптық жылдамдықты беру операциялар жиынтығы арқылы датчиктерден санауды және мәліметтерді өңдеуді қамтамасыз етуі тиіс.
Сонымен қатар жүйе өзіне ішкі жүйелерді де қосуы керек: бағдарламалық қаматмасыз етуді бақылау, аспаптық бетперде мен максималды жылдамдық қатарынан шығуды бақылау, жылдамдықтың 2км/сағ-тан асып кетуін бақылау, шамадан артық болса сигнал беру ; әрбір мәнге жаңарту жиілігі минималды 31 мсек және максималды 60 мсек.
Жүйеде берілген мәліметтер контроллерге қызмет көрсету бағдарламасы өзара ауысуы үшін ауыспалылардың адрестері қатаң берлген ауыспалы түрдегі ақпаратты көрсетеді.
Курстық жұмыс: 36 беттен, 2суреттен тұрады.
Мазмұны
Нормативтік сілтеме5
Анықтамалар6
Белгілер мен қысқартулар7
Кiрiспе8
1 Тапсырманы орнату9
1. 1 Талданған құрылым және контроллердің жұмыс жасау алгоритмі9
1. 2 Аспаптық құралдарды және элементтік базаларды таңдау10
1. 3 Ішкі жүйенің програмалық қамтамасыз ету құрылымын жетілдіру13
1. 4 Программа күйінің құрылымдық бейнеленуі14
1. 5 Контроллердің жұмыс жасау алгоритмі15
1. 6 Жүйенің негізгі модуль функцияларының бейнеленуі16
2 Аппараттық функциялардың суреттелуі18
2. 1 Жүйенің негізгі функциялары18
2. 2Программаны инсталяциялау технологиясы19
2. 3Жоба сапасының бағасы19
2. 4 Пайдалану ыңғайлылығы20
Қорытынды35
Пайдаланылған әдебиеттер тізімі36
Нормативтік сілтемелер
Курстық жұмыста келесі құжаттарға сілтемелер қолданылған:
ҚР СТ 1. 5 - 2010 Стандарттардың мазмұны, оны түзу, рәсімдеуге қойылатын жалпы талаптар.
МЖМБС 2. 701 - 84 КҚБЖ (ЕСКД) . Схемалар. Түрлері мен типтері. Орындауға қойылатын жалпы талаптар.
МЖМБС 2. 321 - 84 КҚБЖ (ЕСКД) . Әріптік белгілеу.
СТ ОҚМУ 4. 02 - 2010 Университет стандарты. Сапа менеджменті жүйесі құжаттардың түзу, мазмұндау мен рәсімдеуге қойылатын жалпы талаптар.
СТ ОҚМУ 7. 11 - 2010 Университет стандарттары. Оқу-әдістемелік процестерді басқару.
СТ РК 34. 002 - 2002 Ақпараттық технологиялар. Дербес электронды есептеуіш машиналар.
СТ РК 2. 1 - 2009 ҚР өлшеулер тұтастығын қамтамасыз ететін мемлекеттік жүйе. Түсініктер және анықтамалар.
ӘҢ ОҚМУ 7. 14 - 2010 Курстық жобалау. Мазмұны, тақырыбы, құрылымы, жетекшілік, рәсімдеу, белгілеулер жэне қорғау.
Анықтамалар
Контроллерді басқару жүйелері - бұл түрлі тасушыларда құрылымдалған түрде берілген ақпаратты сақтауды, жаңартуды және таңдауды қамтамасыз ететін бағдарламалық жүйе
МЖ ассемблер - бұл бірыңғай мінездемеері мен қолданулары бар, бағдарламаны жылжыту құралдары бар мықты МАКРО- ассемблер.
Аккумулятор және ССП - операндтың көзі және арифметикалық, логикалық операциялар мен мәліметтерді жіберу операциялары орындалу кезінде нәтижені бекіту орыны болып табылады.
Компаратор - қарапайым тілмен айтқанда операциялық күшейткіш деп аталады.
Инициализация - бастапқы мәліметтерді белгілеу болып табылады.
Редактор - ол программаның бастапқы мәтінін шаблондарды және линкердің ценариі фаилдарын жазуға және редактерлеуге арналған.
Интерфейс - қол жеткізуді және тұтынушыдан жасырын болатын басқа басқару механизмдерін басқару.
Микроконтроллер - қолданушы жазған программа негізінде жұмыс істейтін электронды есептеуіш машинасының нұсқасы.
Микропроцессор - контроллерлердің есептерді шығарушы құрылғысы.
I/O - енгізу-шығару сервері.
Екі байттық операндтар - бұл көрсетілуі үшін екінші немесе үшінші байт командалары қолданылатын тікелей адрестер мен константалар.
Белгілер мен қысқартулар
ПЛК - программаланатын логикалық контроллер
ОЖ - операциялық жүйелер
БҚ - бағдарламалық қамтамасыз ету
САТ - сандық аналогтық түрлендіргіш
АЛҚ - арифметикалық логикалық құрылғы
ОЕҚ - оперативті есте сақтау құрылғы
МКР - мәліметтердің көрсеткіш регистрі
ОК - операция коды
АФР - арнай функциялар регистрі
ТЕҚ - тұрақты есте сақта құрылғы
КСР - көрсеткіш стек регистрі
МЖР - мәліметтер жадының регистрі
МК - микроконтроллер
МЖ - микропрограммалау жүйесі
Кіріспе
Контроллерді басқару жүйелері - бұл түрлі тасушыларда құрылымдалған түрде берілген ақпаратты сақтауды, жаңартуды және таңдауды қамтамасыз ететін бағдарламалық жүйе
Әртүрлі өндірушілерден болатын көптеген контроллерлер бар. Ең көп қолданысқа ие 8051 негізіндегі микроконтроллер болып табылады. Солардың ішіндегі INTEL 8051 фирмасының микроконтроллері көбірек атаққа ие.
ICC8051 тек қана 8051 (КР1816ВЕ51) ғана емес, сонымен қатар сол негізгі архитектура мен команда жүйесін (8032, 8044, 80515, 80525 және т. б) қолданатын микроЭВМ-ді де қолдайды. Тек арнай тағайындалған регистрлердің хабарландырулары мен енгізу/шығрау порттарының өзгерістері ғана қажет болуы мүмкін.
Си ICC8051 компиляторы ANSI стандартындағы Си тілінің барлық негізгі элементтерін қолдайды. Ауыспалылар жадта орналасады, үлкен байттан басталып кіші байттан бітеді ("үлкен байт - кіші байт адресі бойынша") .
Ауыспалылар әрдайым жадта тығыз жиналады, сонsмен қатар 8051 архитектурасы мәліметтерді теңестіруді қажет етпейді. Cпецификациялық 8051 үшін sfr және bit мәліметтер типі Си тілінің қалыпты мәліметтерінен өзгеше болады, жадтың ерекше орныдарында орналасады.
"Сhar" ден "int"ке дейін аталған константа диапазонымен анықталатын мәліметтердің барынша қысқа типімен орналастырылатын ("enum") аталған ауыспалылар.
Assembler (INTEL 8051) микропрограммалау жүйесі микропроцессорлар үшін бағдарлама құруда жүйелі бағдарламалық өнім жинағы болып табылады. МЖ 16 разрядтық персоналды компьютерлерден бастап 32-разрядтық дейін жұмыс істеуге құрылған.
МЖ ассемблер - бұл бірыңғай мінездемеері мен қолданулары бар, бағдарламаны жылжыту құралдары бар мықты МАКРО- ассемблер. Алайда ассемблерлер сол негізгі база пакетімен құрылған болса да, олар микропроцессорды құратын ассемблермен жоғары дәрежелі сәйкестікке ие. Негізгі пәндері - бұл ассемблерді пайдалану тәсілдері, модульді бағдарламалауды қолдау және жоғары деңгейлі тілдермен байланыс.
Барлық ассемблерлер екі кірісті, бір бағдарлама тәрізді орындалады. Орындалатын кезде уақытша файлдар құрылмайды, және ХLINK сияқты ішкі есептеулер үшін 32-разрядтық құрылым қолданылады, ол кез-келген өлшемдегі кодты виртуалды генерациялауға мүмкіндік береді. Қазіргі таңда көп қолданысқа ие Assembler 8051 болып табылады, өйткені олар негізгі кодты алуға мүмкіндік береді.
1 Тапсырманы орнату
Берілген курстық жұмыстың нәтижесі болып көлік қозғалысының жылдамдығы туралы деректермен есептегішті қамтамасыз ететін контроллердің бағдарламалық өнімі болу керек. Жүйе санау, өңдеу, сөздерді құру, САТ-ке аспаптық жылдамдықты беру операциялар жиынтығы арқылы датчиктерден санауды және мәліметтерді өңдеуді қамтамасыз етуі тиіс.
Кіріс мәліметтері болып: аспаптың маскасынан және максималды жылдамдықтын саналған мәліметтер табылады.
Шығыс мәліметтері болып: РТМ-ге сәйкес 206, 207 және 271 сөздер; аспаптық жылдамдықпен САТ-тің мәліметтері.
Сонымен қатар жүйе өзіне ішкі жүйелерді де қосуы керек: бағдарламалық қаматмасыз етуді бақылау, аспаптық бетперде мен максималды жылдамдық қатарынан шығуды бақылау, жылдамдықтың 2км/сағ-тан асып кетуін бақылау, шамадан артық болса сигнал беру; әрбір мәнге жаңарту жиілігі минималды 31 мсек және максималды 60 мсек.
Талданған құрылым және контроллердің жұмыс жасау алгоритмі
Жүйеде берілген мәліметтер контроллерге қызмет көрсету бағдарламасы өзара ауысуы үшін ауыспалылардың адрестері қатаң берлген ауыспалы түрдегі ақпаратты көрсетеді.
Аспаптық құралдарды және элементтік базаларды таңдау
Элементтік базаның бақылау аспабын таңдау кезінде келесі жағдайлар ескерілді:
Бағдарлама құруда қолданылатын Intel 87C51FB микроконтроллері негізгі мінездемелерге ие.
Intel87C51FB микроконтроллері n-МОП семействасының технологиясына жатады және сыртқы 40 шығыстарға ие БИС корпусында шығарылады. Корпустың цоколевкасы және шығыстың атаулары 1. 1 суретте көрсетілген. Intel87C51FB жұмыс істеу үшін +5 В энергия көзі қажет. Төрт программаланатын енгізу/шығру порты арқылы Intel87C51FB үш шығыс жағдайы бар ТТЛ-схема стандартындағы ортамен әрекеттеседі. Intel87C51FB корпусы кварцты резонаторды қосу үшін 2 шығыс, сигналдар үшін 4 шығыс, МК-дің жұмыс режимін басқару және 3 порттың 8 сызығы, ортамен ақпарат алмасатын арнайы мамандандарылған функцияларды орындау үшін тұтынушымен бағдарламалануы мүмкін болады.
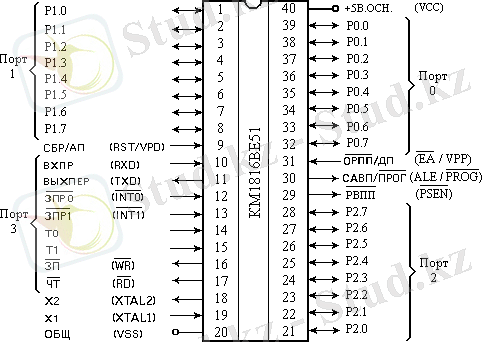
Сурет 1. 1 Корпустың цоколевкасы және Intel87C51FB микроконтроллер шығысының атаулары
Intel87C51FB контроллері базасында бағдарлама құру ассемблерге, бағдарламалық симмуляторға, Phyton фирмасының ішкісызбалық эммуляторға және программаторға сүйенеді.
Intel87C51FB сериясы жылдамжылдамдықты көлікті және электрлік қозғалтқыштарды басқару сызбасында аспаптарды көрсететін және процессорлармен байланысқан, үнемді өшіп кеткен қабылдағыш датчиктердің кең спектрлі жағдайларына сәйкес келеді. ПЗУ-дың жоқ болуы қолданбалы бағдарламаларда параметрлерді қоюға мүмкіндік береді(берілісдатчигінің кодтары, қозғалтқыштың жылдамдығы, қабылдағыштың жиілігі және т. б. ) .
Микропроцессордың құрылымдық схемасы 1. 2 суретте көрсетілген. Құрылымдық схеманың негізін барлық негізгі түйіндер мен құрылғыларды байланыстыратын ішкі екібағытталған 8-биттік шина құрады: резидентті жад, АЛҚ, арнайы функциялардың регистрлер блогы, басқару құрылғысы және енгізу/шығару порттары. Құрылымның негізгі элементтері мен есептеуіш процесті құрудың ерекшеліктерін қарастырайық.
Арифметико - логикалық құрылғы
8-биттік АЛҚ арифметикалық қосу, алу, бөлу және көбейту; ЖӘНЕ, НЕМЕСЕ логикалық операцияларды, НЕМЕСЕ емес, сонымен қатар циклдік жылжу, түсіру, инвертирлеу және т. б. операцияларды орындай алады. АЛҚ-та операндтарды уақытша сақтау үшін арналған Т1 және Т2 бағдарламалық қолжетімді емес регистрлері бар, ондық түзету схемасы және белгілерді құру схемасы.
Қарапайым қосу амалы АЛҚ-та регистр құрамын инкреминтерлеу, мәліметтер көрсеткіш- регистрін жылжыту және келесі РПП адресін автоматты есептеу үшін қолданылады.
Қарапайым азайту амалы АЛҚ-та регистрлерді декреминтирлеу мен ауыспалыларды салытыру үшін қолданылады.
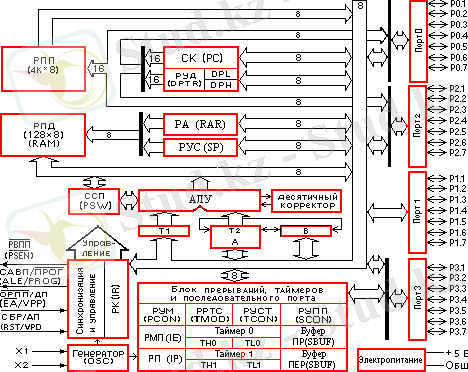
Сурет 1. 2 Микропроцессордың құрылымдық схемасы
АЛҚ ақпараттық обьекттің төрт типімен операция жүргізе алады: бульдік(1бит), сандық(4 бит), баййттық(8 бит) және адрестік(16 бит) . АЛҚ-та осы мәліметтердің жіберу мен түрлендіруінің 51 түрлі операциясы орындалады. Адрестеудің 11 режимі қолданылатындықтан, комбинирлеудің "операция/ адрестеудің режимі " арқылы 111 базалық сан командасы бір байтты операция коды мүмкін болатын 256 дан 255-ке дейін кеңейеді.
Резидентті жад
Кристалда орналасқан бағдарламаның және мәліметтер жады физикалық және логикалық бөлінген, адрестеудің әртүрлі механизмне ие, түрлі сигналдарды басқарумен жұмыс істейді және түрлі функцияларды орындайды.
Бағдарламалардың жады (ТЕҚ немесе СППЗУ) 64 Кбайт сиымдылыққа ие және командаларды, инициализация сөздерін басқаратын, кіріс және шығыс ауыспалыларын қайта кодтау таблицасын константаны сақтау үшін қолданылады. РПП 16-биттік адрес шинасына ие, сол арқылы команда есептегішінен немесе мәлімет көрсеткіш регистрінен рұқсат қамтамасыз етіледі.
Мәліметтер жады (ОЕҚ) қолданбалы бағдарламаның орындалу процесі кезінде ауыспалыларды сақтау үшін қажет, бір байтпен адрестеледі және 128 байт сыйымдылығы бар. Сонымен қатар адрестік РПД кеңістігіне (РСФ) арнайы функциялардың адрестік регистрі қосылады. Бағдарламаның жады сонымен қатар мәліметтер жады сияқты сыртқы БИС-ті қосу арқылы кеңеюі мүмкін болады.
Аккумулятор және ССП
Операндтың көзі және арифметикалық, логикалық операциялар мен мәліметтерді жіберу операциялары орындалу кезінде нәтижені бекіту орыны болып табылады. Сонымен қатар тек аккумуляторды қолдану арқылы жылжу, нөлге тексеру, байрақты құру паритеті және т. б. операциялары орындалады.
Көрсеткіш- регистрлер
8-биттік стек көрсеткіші (РСК) РМЖ-ның кез- келген аймағын адрестей алады. Оның мазмұны PUSH және CALL командалары орындалуы кезінде стекке сақталмай тұрып инкрементинерленеді. РСК мазмұны POP және RET командалары орындалғаннан кейін декрементинерленеді. Мұндай стек элементтерін адрестеу прединкрементным/постдекрементным деп аталады. Intel87C51FB инициализациялау процесінде СБР және РСК сигналынан кейін автоматты түрде 07Н коды жүктеледі. Бұл қолданбалы бағдарлама стекті қайта анықтамаса онда бірінші стектегі мәлімет элементі РПД ұяшығында 08Н адресімен орналасатынын білдіреді.
Екі байттық мәліметтердің көрсеткіш-регистрі (МКР) әдетте 16-биттік сыртқы жадқа айналу операциясын бекітуді қолданылады. МК51 командалары болып МКР немесе 16-биттік регистр, немесе екі тәуелсіз 8-биттік регистр қолданылады (DPH және DPL) .
Таймер/есептегіш
Intel87C51FB жабдықтарының құрамында символдық аттарымен ТНО, TLO және THI, TLI регистрлік жұптар бар, олардың негізінде оқиғалардың екі тәуелсіз бағдарламалы- басқарылатын 16-биттік таймер/есептегіш жұмыс жасайды.
Жүйелі порт буфері. SBUF символдық аты бар регистр өзімен екі тәуелсіз регистрді көрсетеді - қабылдағыш буфері және жібергіш буфері. SBUF-та байтты жүктеу жүйелі порт арқылы процестің басын жіберуді шақырады. SBUF-тан байт оқылғаннан кейін деген, ол оның қоры жүйелі порттың қабылдағышы болып табылады.
Арнайы функциялар регистрі
Символдық аттары P, IE, TMOD, TCON, SCON және PCON регистрлерін бекіту және басқаратын биттің программалық өзгерісі мен үзіліс схема жағдайының битті, таймер/есептегішті, жүйелі порттың қабылдап жібергішін және Intel87C51FB электрқорегінің күшін басқару үшін қолданылады.
Барлық төрт порт та ақпаратты байт бойынша енгізу және шығару үшін арналған. Әрбір порт басқарылатын регистр- ілгешектен, кіріс буферден және шығыс драйверден тұрады. 3 порттың барлық шығыстары баламалы функцияларды орындау үшін қолданылады. Баламалы функциялар 3 порттың регистр- ілгешегіне (Р3. 0-Р3. 7) сәйкес биттің 1 жолы арқылы жазылуымен іске асырылуы мүмкін.
Көптеген командалар бір немесе екі байт формада, және бір немесе екі машиналық циклде орындалады. 2 МГц тактілік жиілікте машиналық цикл 1мкс-ты құрайды. Әдетте кез келген типте және форматта команданың алғашқы байты операцияның кодын құрайды. Екінші және үшінші байты не операндтың адресін, не ортақ емес операндыларды құрайды.
Операндылардың типі
Intel87C51FB опрендыларының құрамына төрт типтің операндтары кіреді: биттер, 4- биттік сандар, байттар және 16-биттік сөздер.
Intel87C51FB 128 программалы-басқарылатын тұтынушының жалауына ие. Арнайы функциялар мен порт регистрлерінің жеке бит блогын адрестеуге мүмкіндік бар. Битті адрестеу үшін тура 8- биттік адрес(bit) қолданылады. Биттің жанама адрестелуі мүмкін емес. Жеке биттердің адрестеу кесікіні суретте көрсетілген. Төрт биттік опренадтар тек айырбастау операцияларында қолданылады(SWAP және XCHD командалары) . Сегіз биттік операнд болуы мүмкін: программаның ұяшық жады немесе мәліметтер жады, константа, арнайы функциялар регистрі (АФР), сонымен қатар енгізу/шығару порттары. Порттар және АФР тек тікелей жолмен адрестеледі. Жадтың байттары жанама адрестік регистрлер арқылы (R0, R1, DPTR және PC) адрестеледі. Екі байттық операндтар - бұл көрсетілуі үшін екінші немесе үшінші байт командалары қолданылатын тікелей адрестер мен константалар.
1. 3 Ішкі жүйенің програмалық қамтамасыз ету құрылымын жетілдіру
АРМ СБ-ға олардың жағдай жайлы хабар беретін және күзетке қойылған обьектілерді ұдайы бақылауды қамтамасыз ететін арнайы компьютерді ашудың ішкі жүйесінің бақылау жүйесін құру қажет.
УСВИЦ-250 контроллердің программасы келесі негізгі функцияларды орындауы тиіс:
Жылдамдық кодтарының маскілерінен есептеуді жүзеге асыру; Осы кодтарды екілік кодтарға ауыстыруды жүзеге ауыстыру; ARING-427 бойынша 32-разрядтық сөздерді құруды жүзеге ауыстыру; Шығатын сигналды магистральге шығаруды жүзеге ауыстыру; Аспаптық жылдамдық туралы аналогтық сигналдың шығысын жүзеге ауыстыру; 1. МК-мен бірлесіп әрекеттесетін ішкіпрограмма - грей кодын қабылдауы тиіс.
2. Кодтарды формула бойынша ауыстыратын ішкіпрограмма:
Екілік_код4=Грей_коды4;
Екілік_код3= Грей_коды3⊕ Екілік_код4;
Екілік_код2= Грей_коды2⊕ Екілік_код3;
Екілік_код1= Грей_коды1⊕ Екілік_код2;
Екілік_код0= Грей_коды0⊕ Екілік_код1;
3. ARING-427 бойынша 32-разрядтық сөздерді құратын ішкі программа келесі функцияларды орындауы тиіс:
Жылдамдықтың мағынасы кіші разрядтың бағасына алып келу; УСВИЦ-250-тен индификатор сөзін 8-9 адрестеріне апару; 30-29 адрестеріне сөздің растығын апару; Сөздің жұптығын санау және сөздің 31 адресіне апару; Сөздің адресі деген сөзде 0-8 адрестеріне апару. 4. Шығатын сигналды магистральге 12. 5КГц жиілікпен шығаруды жүзеге асыратын ішкі программа келесі функцияларды орындауы тиіс:
12. 5КГц шығыс жиілігін қамтамасыз ету; 206, 207 және 271 сөздерін кезектесіп жіберуді қамтамасыз ету; 5. Аспаптық жылдамдық туралы аналогтық сигналдың шығысын жүзеге ауыстыратын ішкі программа келесі функцияларды орындауы тиіс:
САТ регистрне аспаптық жылдамдықты жазу; Регистрге жазу үшін үзіліс жасау; Регистрге жазу туралы САТ-ке жалау орнату.
1. 4 Программа күйінің құрылымдық бейнесі
Уақытша өңдеулер үшін айнымалылар және олардың адрестерімен константалар.
const int speed=172 - жерге орнатылған контроллерді қосуды бақылау үшін қызмет етеді;
const int test_speed=2 - аспаптық және максималды жылдамдықта маскаларды тексеру үшін қызмет етеді;
static int a @ 0x18 - уақытша айнымалы;
static int flag @ 0x18 - уақытша айнымалы;
static int flag1 @ 0x1a - уақытша айнымалы;
РТМ бойынша олардың 206 адресімен шығыс сөзі үшін айнымалы
static unsigned long SlVmd @ 0x10;
static unsigned char SlVmd_1 @ 0x10;
static unsigned char SlVmd_2 @ 0x11;
static unsigned char SlVmd_3 @ 0x12;
static unsigned char SlVmd_4 @ 0x13;
РТМ бойынша олардың 207 адресімен шығыс сөзі үшін айнымалы
static unsigned long SlVpr @ 0x3c;
static unsigned char SlVpr_1 @ 0x3c;
static unsigned char SlVpr_2 @ 0x3d;
static unsigned char SlVpr_3 @ 0x3e;
static unsigned char SlVpr_4 @ 0x3f;
РТМ бойынша олардың 271 адресімен шығыс сөзі үшін айнымалы
static unsigned long SlDs @ 0x38;
static unsigned char SlDs_1 @ 0x38;
static unsigned char SlDs_2 @ 0x39;
static unsigned char SlDs_3 @ 0x3a;
static unsigned char SlDs_4 @ 0x3b;
САТ-ке оның адресімен беретін айнымалы
static unsigned int CapSlowo @ 0x14;
Олардың адрестерімен стектің жұмыс істейтін аймақтары үшін айнымалылар
static unsigned long Stec @ 0x28;
static unsigned int Stec1 @ 0x28;
static unsigned int Stec2 @ 0x2a;
Олардың адрестерімен аударылған жылдамдықтарын сақтау үшін айнымалылар
static unsigned int StecVprd @ 0x30;
static unsigned int StecVmdd @ 0x32;
Олардың адрестерімен масканың аспаптық жылдамдығынан енгізетін айнымалылар
static unsigned int Vprg @ 0x20;
static unsigned int Vmdg @ 0x24;
Олардың адрестерімен масканың максималды жылдамдығын енгізетін айнымалылар
static unsigned int Vprd @ 0x22;
static unsigned int Vmdd @ 0x26;
1. 5 Контроллердің жұмыс жасау алгоритмі
Контроллер келесі функцияларды өзіне қосады:
- Күзетші таймерді түсіру;
... жалғасыСіз бұл жұмысты біздің қосымшамыз арқылы толығымен тегін көре аласыз.
- Іс жүргізу
- Автоматтандыру, Техника
- Алғашқы әскери дайындық
- Астрономия
- Ауыл шаруашылығы
- Банк ісі
- Бизнесті бағалау
- Биология
- Бухгалтерлік іс
- Валеология
- Ветеринария
- География
- Геология, Геофизика, Геодезия
- Дін
- Ет, сүт, шарап өнімдері
- Жалпы тарих
- Жер кадастрі, Жылжымайтын мүлік
- Журналистика
- Информатика
- Кеден ісі
- Маркетинг
- Математика, Геометрия
- Медицина
- Мемлекеттік басқару
- Менеджмент
- Мұнай, Газ
- Мұрағат ісі
- Мәдениеттану
- ОБЖ (Основы безопасности жизнедеятельности)
- Педагогика
- Полиграфия
- Психология
- Салық
- Саясаттану
- Сақтандыру
- Сертификаттау, стандарттау
- Социология, Демография
- Спорт
- Статистика
- Тілтану, Филология
- Тарихи тұлғалар
- Тау-кен ісі
- Транспорт
- Туризм
- Физика
- Философия
- Халықаралық қатынастар
- Химия
- Экология, Қоршаған ортаны қорғау
- Экономика
- Экономикалық география
- Электротехника
- Қазақстан тарихы
- Қаржы
- Құрылыс
- Құқық, Криминалистика
- Әдебиет
- Өнер, музыка
- Өнеркәсіп, Өндіріс
Қазақ тілінде жазылған рефераттар, курстық жұмыстар, дипломдық жұмыстар бойынша біздің қор #1 болып табылады.

Ақпарат
Қосымша
Email: info@stud.kz