25 тонналық көпірлік кранның көтеру механизмінің электр жетегін жетілдіру

ҚАЗАҚСТАН РЕСПУБЛИКАСЫНЫҢ БІЛІМ ЖӘНЕ ҒЫЛЫМ МИНИСТРЛІГІ
АҚТАУ ТЕХНОЛОГИЯЛЫҚ ҚЫЗМЕТ КӨРСЕТУ КОЛЛЕДЖІ
Дипломдық жұмыстың
ТАПСЫРМАСЫ
Студент: Мамышев Нұрбек
Мамандығы: 0902000 «Электрмен қамтамасыз ету»
Біліктілігі: 090203 «Техник-электрик»
Дипломдық жұмыстың жетекшісі: Нәдірханова Дана Таубайқызы
Дипломдық жұмыстың тақырыбы: “Жүк көтергіштігі 25 тонналық көпірлік кранның электрлік жетегін жетілдіру”
АТҚҚК бұйрығымен бекітілген
«» 2019 ж. №
Тапсыру мерзімі:
Жұмыстың мазмұны мен көлемі (түсіндірме, есептеу және сараптау бөлімі, теориялық және эксперименталды бөліктері немесе сұрақтардың тізбесін әзірлеу)
Дипломдық жұмыстың материалдарың орындау:
а)
б)
в)
г)
д)
Графикалық материалдардың тізбесі (кесте, сызулар, диаграммалар және графиктер және т. б. )
Консультанттың толық аты-жөні:
Нормоконтролердің толық аты-жөні:
Дипломдық жұмыстың ұсынысы және күнтізбелік жоспардың орындалуы:
Дипломдық жұмыстың жетекшісі
(жетекшісің қолы)
Тапсырма орындауға қабылданды
(студенттің қолы)
Тапсырма берілді « » 2019 ж.
Мазмұны
Кіріспе
Жүкті көтеру және жылжыту процесін циклмен атқаратын жүк көтергіш машинасын көтергіш кран деп атаймыз. Көтергіш кран көпір, ферма, мұнара, платформа, діңгек, жебе не таған тәрізді металл құралымдардан; шығыр, тельфер, шток, рычаг сияқты көтергіш механизмнен; ілгек, траверса, қысқыш немесе шөміш секілді жүк қармағыш жабдықтардан тұрады. Құралымдық ерекшеліктеріне сай көтергіш кран бұлардан басқа қосымша қондырғылармен және механизмдермен жабдықталады. Кран құрылысының ерекшелігіне және жұмыс істеу шартына байланысты көпірлік, порттық, мұнаралық және тағы басқа болып бөлінеді. Электр машина құрылысын өндіретін цехтарда ең көп таралғаны көпірлік крандар. Оладың көмегімен ауыр дайындамаларды, бөлшектерді және машина түйіндерін көтеріп-түсіру, сондай-ақ цехтын ішімен жылжытулар орындалады.
Электр крандарында электрқозғалтқыш, іске қосу және реттегіш кедергілер, тежегіш электромагниттер, контроллерлер, қорғаныш, іске қосуды реттегіш, сигналдық, тосқауыл және жарық беретін аспаптар, шеткі ағытқыш пен тоқ жалғағыш орнатады. Кранға қуат көзі не құрылыстық конструкцияларда қозғалмайтындай етіп бекітілген тройллерлі өткізгіштер және кранда бекітілген тоқ жалғағыш арқылы, не иілгіш кабель көмегімен жіберіледі. Электрқозғалтқыштар, кран электрөткіштері мен аппараттары қоршаған орта жағдайларына сәйкес құрастырылады.
Соңғы уақыттары Қазақстандағы, сондай-ақ, шетелдегі металлургия кәсіпорындары мен олардан тыс жерде кран шаруашылығында жиілігі реттелетін электржетегін пайдалануда тұрақты беталыс байқалуда. Мұны келесідей түсіндіруге болады. Кран шаруашылығында реттелетін жетекті пайдалану кранды жылдамдату бөлігіндегі ыңғайлы жұмыс істеу көрсеткіштерін әжептеуір жоғарылату мүмкіндігін береді. Өз кезегінде, жиілігі реттелетін жетегімен қамтамасыз етілетін біркелкі ауыспалы үрдістері жетектің кинематикалық тізбегінің элементтеріндегі динамикалық салмақтың айтарлықтай төмендеуіне алып келеді, бұл кранның механикалық жабдығының сенімділігін және оның ұзақ мерзімді жұмыс істеуін арттыруға қолжеткізеді, редукторды, арқанды жүргізу барабанын, тежегіш қалыбын, электрқозғалтқышын және кранды жаңғырту кезіндегі өзге элементтерді ауыстыру қажеттігі болмайды.
Осы жобаның мақсаты - жүк көтерімділігі 25 тонна көпірлік кранының көтеру механизмінің электржетегін жетілдіру болып табылады.
Түсіндірме жазбасында технологиялық үрдістің сипаттамасы, қозғалтқышты таңдау және жүктемелік диаграмманың есептелуі, жиіліктік түрлендіргішті таңдау, автоматты реттеу жүйесін әзірлеу және есептеу, көпір кранының басты көтеру механизмін автоматты басқару сұлбасын әзірлеу көрсетілген. Түсіндірме жазбаның аяғында жобаның экономикалық мақсатқа лайықтығының, қауіпсіздігі мен экологиялығының талдауы келтіріледі.
1 Технологиялық бөлім
1. 1 Өндірістік қондырғыларды сипаттау және технологиялық үрдістерді талдау
Көпірлік кран - көпірі жер үстіндегі рельсті кран жолына тіреледі, ал жүк тартатын құралы көпір бойын жылжитын жүк арбашасына немесе электроталдарға ілінеді. Жалпы тағайындалудағы көпірлік крандар жүк көтергіштігі 320 т дейін жасалады, арнайы тағайындалудағылар - 630 т дейін, аралығы - 60 м, аралық биіктігі - 50 м. Жалпы тағайындалудағы көпірлік крандар жабдықты жөндеу кезінде, жөндеу жұмыстарының өндірісінде, басты өндіріс цехтарында технологиялық жұмыстар үшін, қоймаларда, асқын жүктелу жұмыстары кезінде қолданылады.
Көпірлік кранның металл құрылымы екі басты бөліктерден тұрады: көпір және арбашадан. Көпір өндірістік бөлме немесе қоймалардың жұмыс аралығын жауып тұрады. Ол екі негізгі және екі ақырғы бөренелерден тұрады. Жүру механизмінің жүріс доңғалақтары арқылы көпір жер үстіндегі крандық рельстерге тіреледі. Соңғылары ғимараттар бағанасы консольдарында немесе крандық эстакадада жөнделген кран астындағы бөренелерде бекітілген. Доңғалақтар ауыстыратын механизм арқылы бір немесе екі электр қозғалтқыштарымен келтіріледі. Крандардың жүріс доңғалақтары екі ребордалық немесе тік бағытталған аунақшамен ребордасыз болып екі түрде орындалады. Негізгі бөренелерде өзінің жетегінің көмегімен арбалар жылжитын рельстер бекітілген. Оның жақтауында жүк көтеретін бір немесе екі механизм орналасқан, ол механизмдердің әрбірі ілгіш ілгектерден, арқандық полиспасттан, барабаннан, ауыстыратын механизмнен, тежегіш пен электр қозғалтқыштан тұрады. Кран механизмдерімен көпірдің металл құрастырылымына ілінген кабинадан басқарады, ол жұмыс қауіпсіздігі мен ең жақсы шолудың болуына мүмкіндік береді, ал қажетті кезде - арбада (кран аралығы бойында автономды жылжуға мүмкіндік береді) .
Кран жұмысы кезінде кранның, арбаның және ілміштің қозғалыс бағыттары әрдайым алмасып тұрады. Көтеру механизмінің жұмысы жүкті көтеру және түсіру кезеңдері мен бос ілгішті көтеру мен түсіру кезеңдерінен тұрады. Кранның өнімділігін ұлғайту үшін бірнеше операцияларды қоса атқару қолданылады, мысалы бір уақытта кран мен арбаларды қозғалту. Жүкті ілгішке ілу және ілгішті босату уақытында қозғалтқыш өшірулі болады және көтеру механизмі жұмыс істемейді.
Тағайындалуы бойынша әртүрлі жүккөтергіш машиналарды үш негізгі топқа біріктіруге болады:
- Әмбебап жүккөтергіш машиналар - жүк арқанында ілгіш ілмек көмегімен әртүрлі жүктерді көтеру мен жылжыту үшін қызмет көрсететін крандар, жүкарбалар, тали;
- Өндірісте, көлікте және құрылыста белгілі технологиялық операцияларды орындау үшін арналған жүккөтергіш машиналар;
- Машина жабдықтарының жылжуымен байланысты құрылыс, монтаж және жөңдеу жқмыстарын орындау үшін арналған крандар.
Өз кезегінде, жүккөтергіш машиналар жұмыс шарттары бойынша шартты түрде келесідей топтарға бөлуге болады:
- Қайталанылатын-қысқа уақытты режімде бөлмелерде жұмыс істеу үшін қолданылатын әмбебап тағайындалудағы машиналар және орташа жұмыс істеу ұзақтығы тәулігіне 16 сағатқа дейін;
- Қайталанылатын-қысқа уақытты режімде бөлмелерде жұмыс істеу үшін қолданылатын әмбебап тағайындалудағы машиналар және орташа жұмыс істеу ұзақтығы тәулігіне 8 сағаттан 24 сағатқа дейін;
- Қайталанылатын - қысқа уақытты режімде бөлмелерде де, сондай-ақ ашық ауада да қолданылатын белгілі технологиялық операцияларды орындау үшін арналған машиналар және жұмыс істеу ұзақтығы тәулігіне 24 сағатқа дейін;
- Жалпы жылдық жұмыс істеу сағаттар саны 500 сағаттан аспайтын қысқы уақытты және қайталанбалы - қысқа уақытты режімдерде қолданылатын бір реттік және мезгілдік жүккөтергіш операцияларды орындау үшін арналған машиналар.
Әмбебап жүккөтергіш машиналар жүктеме бойынша пайдалану шарттары мен жұмыс уақытын ескере отырып жасалынады, сонымен қатар операцияларды жүргізу қарқындылығы, операциялардың жауапкершілік деңгейі және бірнеше орташаланған пайдалану категорияларымен байланысты қосымша ескере отырылып жасалынады.
1. 2 Кран механизмінің негізгі режимдері
Белгілі технологиялық операцияларды орындау үшін арналған механизмдер, сонымен қатар мезгілдік жұмыстарды орындау үшін арналған механизмдер өздерінің тағайындалуларына сәйкес әбден белгілі пайдалану шарттары болады. Жүккөтергіш машиналардың барлық жұмыс істеу режімдерінің әркелкілігін жүйелеу мақсатымен Мемгортехнбақылау машиналық жетекпен механизмдердің жұмыс істеу режімдерінің келесідей категориясын орнатты: жеңіл - Ж; орташа - О; ауыр - А; өте ауыр - ӨА.
Соңғы уақытта технологиялық кешендер үшін арналған крандар қатары Мемлгортехбақылау қолданыстағы классификациялаумен анықталған ӨА режімімен салыстыру бойынша электр жетегінің күрделірек жұмыс істеу режімінде пайдалану үшін жобаланады. Бұл режім қосылу ұзақтығымен сипатталады ПВ=100% дейін, қосылу саны сағатына 600 және жоғары. Бұл жағдайлар үшін жаңа режім категориялары енгізіледі: аса ауыр - АА. Қазіргі уақытта АА режімдерін қоса, бес режім категориясын қарастыратын стандарт болады.
Жүк жылжыту жылдамдығы механизмдердің өнімділігі мен қуатын анықтайды және жүк көтеру операцияларының орындалу тиімділігін ескереміз, яғни кран механизмінің ең төмен бастапқы құны кезінде қажетті уақытты алу. Оңтайлы жылдамдықты таңдау маңызды міселе болып табылады, оның қажетті шешімін тек өнімділік факторларын, энергия шығындалуын, жылдамдықты реттеу мүмкіндігі мен тиімділігін, сонымен қатар реттеу жүйесінің техника-экономикалық бағасын ескере отырып таба аламыз.
Соңғы жылдарда тез жүретін жүккөтергіш машиналардың жылдамдық параметрлерін оңтайландырумен байланысты зерттемелер жүргізілді. Осы зерттемелер жүргізу нәтижесінде белгілі шекке дейін машинаның жылдамдығын жоғарлату кезінде машинаның өнімділігі жылдамдықпен бірге өсетіні орнатылды, бірақ жылдамдықтың ары қарай жоғарлатуы кезінде екпін уақыты ұлғаюы мен кран механизмдерінің тежелуінен өнімділік төмендеуі болып қалуы мүмкін.
Жылдамдық параметрлері талдауының көрсетуі бойынша әрбір механизм түрі үшін (көтеру, бұрылыс және тік жылжу) жылдамдық шектері болады, ол шектерден асу жөнсіз болады.
Жүккөтергіш механизмдердің жылдамдығы келесі сілтемелерден шыға таңдалады:
- номиналды жылдамдық технологиялық үдеріс шарттарымен анықталады, яғни циклдің орындалу уақытымен;
- номиналды жылдамдық қоректендіретін торап қуатымен шектеледі немесе белгілі мөлшердегі жетектік қозғалтқышты орнату мүмкіндігімен шектеледі;
- номиналды жылдамдық механизмнің берілген минималды жылдамдығы кезінде реттеу диапазонының функциясы болып табылады.
- Номиналды жылдамдық ең аз энергия шығыны кезінде ең үлкен өнімділікті қамтамасыз етуі қажет.
Барлық аталған жағдайлар үшін, біріншіден басқа, жылдамдықтың шектік мәні белгіленген шамадан аспауы керек, ал төртінші жағдай үшін бұл шама ізделініп отырған шама болып табылады. Бірінші жағдай үшін жылдамдық кез келген қажетті шама бола алады, бірақ сонымен қоса жылдамдықтың белгілі шамаларынан асатын болса, егер оған арнайы реттеу параметрлерімен жүйе қолданылмаса, онда операция уақыты қысқармайды.
Номиналды жылдамдық таңдау кезінде кейде әртүрлі жүк өңдеу технологиясымен анықталатын минималды жылдамдық шешуші шама болып табылады. Қазіргі уақытта көптеген жүкті қайта өңдеу технологиялық үдерістері үшін жүктің дәлдігін орнату мақсатымен минималды жылдамдықтардың оңтайлы шамалары алынды. Осы шамаларды қолдана отырып, берілген номиналды жылдамдық кезінде жылдамдық реттеудің қажетті диапазонын орнату немесе белгілі және жетерлік реттеу диапазоны үшін номиналды жылдамдықты таңдау.
Аралық тиянақталған жылдамдықты таңдау, ең алдымен, адам қабілеттерінің көрші тиянақталған жағдайлардан жылдамдық айырмашылығын қабылдауынан тәуелді болады және осы айырмашылықты қабылдау негізінде келесі басқару операцияларын жасағандықтан тәуелді болады. Тәжірибеле көтеру механизмінің жылдамдық өсіру сатысының шамасы орнатылған. Максималды және минималды жылдамдық арасының аралығында тік жылжу механизмінің жылдамдығын реттеу әдетте екпін қарқындылығын өзгерту немесе қажетті үдетуді ескере тежеу жолдарымен жүзеге асады.
Жүккөтергіш машиналардың өнімділігі мен бір сағатта қосылу саны жылдамдық параметрлерімен тығыз байланысты. Машина өнімділігі жүкті қайта өңдеу бойынша операцияның аяқталу уақытына сәйкес. Жүктің белгілі қозғалыс траекториясы кезінде бір операцияның қысқару уақыты машинаның өнімділігінің жоғарлауын білдіреді. Әрбір машинада жүк көтеру операцияларын жүргізу циклдерінің нақты немесе шартты түрлерін таңдай алады.
Жүк көтеру операциясының толық циклі дегеніміз - жүкті ілмектеу, арқанның босандау жерін таңдау, жүкті көтеру және оны қажетті жерге жылжыту, түсіру және жүкті орнату, жаңа операцияның басталуы үшін оны ілмектен шығару. Сонымен қатар жүк көтергіш құрылғының механизмі қажетті минималды міндетті қосылу санын қажет етеді. Бірақ әртүрлі себептермен цикл бойында реттеу жүйесінің жетілмегендігінен, иілгіш ілгіште жүктің теңселуінен, жеткіліксіз басқару тәжірибесінен және т. б. байланысты себептерден оператор қосымша қосу қатарын жүргізеді. Сондай қосымша қосулар саны 2-4 есе қажетті қосу санынан артық болуы мүмкін.
Жүккөтергіш машиналардың жоғары тиімді өңдеулерінің маңызды міндеті болып, нақты қосылу санын минималды қажетті қосылу санына жақындату болып табылады. Қазіргі уақытта ең сапалы реттеу жүйелері минималды қажетті қосылу санынан орташа қосылу санымен операциялар тек 1, 5 есе көп қылып қамтамасыз етуге мүмкіндік береді, ал сол уақытта ең үлкен массалық параметрлік реттеу жүйелері бір жүк жылжыту циклінде 20-30 дейін қосылуды қажет етеді, ол қажетті минималды қосылу санынан 5-6 есе көп. Әртүрлі механизмдерде сағатына қосылулар саны Ж режімі кезінде 40-60 бастап; 500-600 дейін - ӨА режімі үшін. Тұрақты жылдамдықтарды, олардың кең өзгеру диапазонымен қамтамасыз ететін басқару жүйесі өндірісінің құрастыруы мен меңгеруі кезінде біруақытылы өнімділіктің өңдеу жұмыстарын көтерген кезде механизмдердің қосылу санының төмендеуінің жалпы үрдісі басталады.
Берілген жобада біз екібөренелі көпірлік кранды таңдаймыз, ол жүк көтергіштігі 25 тоннаға дейін орташа жұмыс істеу режиміне жатады, ол жөңдеу-механикалық және құрастыру цехтарына жүкті көтеру мен жылжытуды келесідей жұмыс циклі бойынша жүзеге асырады:
. есептік биіктікке номиналды жылдамдықпен номиналды жүкті көтеру;
. үзіліс (берілген орынға жүкті жылжыту) ;
. номиналды жылдамдықпен нөлдік белгіге есептік биіктіктен номиналды жүкті түсіру;
. үзіліс (жүкті түсіру) ;
. жоғары жылдамдықпен есептік биіктікке бос ілгішті көтеру;
. үзіліс (бастапқы орынға кранды жылжыту) ;
. жоғары жылдамдықпен нөлдік белгіге есептік биіктіктен бос ілгішті жіберу;
. үзіліс (жүктеу) .
1. 3 Механикалық бөлігі
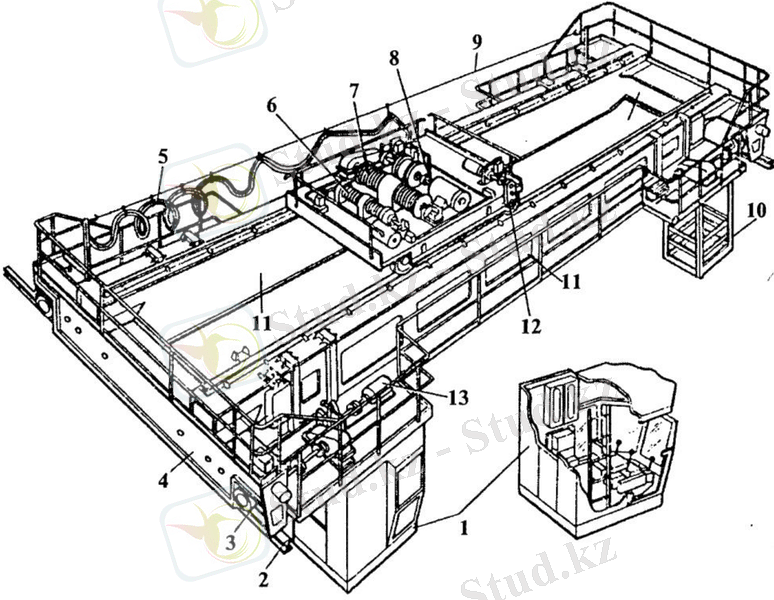
1. Машинист кабинасы; 2. Кранды рельстер; 3. Қозғалғыш дөңгелектер; 4. Ақырғы бөрене; 5. Иілгіш кабель; 6. Жүк көтергіштің жанама механизмі: 7. Жүк көтергіштің негізі механизмі; 8. Крандық арба (тележка) ; 9. Иілгіш кабельді ілуге арналған сым; 10. Троллерге кызмет көрсету ауданы; 11. Негізі бөрене; 12. Арбаның жылжу механизмі; 13. Көпірдің жылжу механизмі
1 сурет - Көпірлік кранның жалпы көрінісі
Кранның құрылмасы (1 - суретіне қараңыз) көпірден тұрады, оның рельстері бойынша жүк тіркемесі жылжыйды; 2 - Кранды басқару краншының кабинасынан жүргізіледі; 3 - ол көпірдің жұмыстық алаңының астында орналасқан. Кранды жабдықтайтын троллейлер мен тоқ қабылдағыштарына қызмет көрсету үшін троллейлерге қызмет көрсету кабинасы қарастырылған; 4 - көпірде орналасқан және краншы кабинасындағы электр жабдықтары; 5 - тіркемелер кранның механизмдерін басқаруға арналған. Жүк тіркемесінің тоқ жетегі иілгіш кабелі; 6 - ол монорельстері бойынша орнын ауыстыратын кареткаларға асылған.
Кранның көпірі жартылай екі көпірден тұрады, оның әрқайсысының салмағы төрт жүріс дөңгелегіне біркелкі беріледі. Жартылай көпірлері бір -бірімен ауыспалы бөренелері арқылы топсалы қосылған. Көпірді жылжыту жетегі - бөлек. Көпір ауыспалы алаңдарымен, сатымен, буфермен жабдықталған.
1. 4 Оператор - өндірістік қондырғы әрекетінің талдауы
Оператордың өндірістік қондырғымен әрекеттесуі кабинада және қашықтықта орналасқан басқару панелімен жүзеге асырылады. «Авариялық тоқтату» түймешігі көмегімен кранды сөндіруді жүзеге асырамыз. Басқару пульті өзімен символдары жазылған түймешіктері бар блокты құрайды.
Крандық механизмдермен басқару жүйесі оператордың үздіксіз бақылауында болатын құрылғылар категориясына жатады, яғни бұл жүйелерде операциялардың басталу кезеңі, жылдамдық параметрлері және операциялардың аяқталу кезеңдерін таңдау операциялары механизмді басқаратын адаммен жүзеге асырылады. Өз кезегінде басқару жүйесі қалаулы жылдамдық параметрлерін орындау үшін қажетті қосылу реттілігін қамтамасыз ету қажет, сонымен қоса, шамадан артық жүк тиеуді алдын алу және қажетті қорғанысты қамтамасыз ету.
2 Кранның электржетегінің, қозғалтқышының және күштік түрлендіргіштің типін таңдау
2. 1 Дипломдық жоба тақырыбы бойынша әдеби шолу
Өндірістік үдерісінің кешендік механизациялау мен автоматтандыруды, жүкті тиеу - түсіру қол жұмыстарын жоюды жүзеге асыруда маңызды рөл көтергіш-көліктік машина жасауға жатады. Артық жүкті тиеу жұмыстары кезінде ауыр еңбектің едәуір қысқаруы ең алдымен жүк тартатын операцияларды автоматтандыру, жүктерді дәл орнату, сонымен қатар жүккөтергіш машиналармен басқару үдерістерін автоматтандыру жолымен жүзеге асырылады. Осы міндеттер электр жетегі көмегімен шешілетін болғандықтан, заманауи электр жетектерін жетілдіру және енгізу мәселесі әрдайым өсіп тұрады.
Қазіргі уақытта крандық электр жетектерінде толықтай тиристорлық реттеу жүйелері кең қолданыс тапты, сондай-ақ әртүрлі басқарылмайтын және басқарылатын жартылай өткізгіштік түзеткіштер, сонымен қатар механизмдерді жылжыту жылдамдығының айтарлықтай жеткілікті басқаруымен салыстырмалы аз шығындарда жүйелерді алуға мүмкіндік беретін жеке күштік жартылайөткізгіштік аспаптар кең қолданыста болады. Эксплуатациялық қызметкерлерді қысқарту үшін жүккөтергіш машиналарды басқаратын жүйені қолданады, соның ішінде крандармен, радиоканалдар бойынша (қашықтықтан) . Бұл жүйелерде максималды әсер сондай-ақ жылдамдықты тұрақты қамтамасыз ету кезінде жетеді.
Механизмдер мен электр жабдықтарын жүктеуінің жаңа классификациялауы енгізілгенін ескере крандар үшін электр жабдықтарын таңдаудың жаңа әдістеріне басты назар аударылады, сонымен қатар жаңа басқару жүйелеріне, радиоканал бойынша басқарумен қоса, және әртүрлі жылдамдықты реттеу жүйелеріне көп назар аударылады.
Көпірлік крандарды көтеру механизмі белсенді жүктемемен циклдік әрекеттегі механизмдерге жатады. Жалпы жағдайда осы механизмдердің жұмыс істеу циклі технологиядық үдеріспен анықталады, бірақ жетектік қозғалтқыштарды таңдауда динамикалық режімдер едәуір әсерін тигізеді: жіберу, реверс, тежелу.
Отандық өндіріспен жасалатын жүккөтергіш машиналардың басым көпшілігінде электрлік жетек механизмі болады, және сондықтан осы машиналардың әрекет тиімділігі мен өнімділігі айтарлықтай деңгейде крандық электр жабдықта қолданылатын сапалық көрсеткіштерден байланысты болады. Соңғы уақыттарда заманауи крандық электр жетектері құрылымы мен пайдаланылатын басқару жүйелерінде едәуір өзгерістерді басынан өткізді.
Жалпы тағайындалудағы салмағы үлкенірек крандар үшін қысқа тұйықталған қозғалтқыштар негізіндегі электр жетектері кең қолданысқа ие болып бастап жатыр, крандардың едәуір бөлігі еденнен басқарумен жасалады, ал ауыр жұмыс режімдерін орындауға арналған тез жүретін крандар жылдамдықты терең реттеуді, іске қосу бірқалыптығы мен әрдайым энергия қорларын үнемдеуге қойылатын жоғары талаптар кезінде тежелуді қамтамасыз ететін әртүрлі тиристорлық жүйелермен жинақталады.
... жалғасыСіз бұл жұмысты біздің қосымшамыз арқылы толығымен тегін көре аласыз.
- Іс жүргізу
- Автоматтандыру, Техника
- Алғашқы әскери дайындық
- Астрономия
- Ауыл шаруашылығы
- Банк ісі
- Бизнесті бағалау
- Биология
- Бухгалтерлік іс
- Валеология
- Ветеринария
- География
- Геология, Геофизика, Геодезия
- Дін
- Ет, сүт, шарап өнімдері
- Жалпы тарих
- Жер кадастрі, Жылжымайтын мүлік
- Журналистика
- Информатика
- Кеден ісі
- Маркетинг
- Математика, Геометрия
- Медицина
- Мемлекеттік басқару
- Менеджмент
- Мұнай, Газ
- Мұрағат ісі
- Мәдениеттану
- ОБЖ (Основы безопасности жизнедеятельности)
- Педагогика
- Полиграфия
- Психология
- Салық
- Саясаттану
- Сақтандыру
- Сертификаттау, стандарттау
- Социология, Демография
- Спорт
- Статистика
- Тілтану, Филология
- Тарихи тұлғалар
- Тау-кен ісі
- Транспорт
- Туризм
- Физика
- Философия
- Халықаралық қатынастар
- Химия
- Экология, Қоршаған ортаны қорғау
- Экономика
- Экономикалық география
- Электротехника
- Қазақстан тарихы
- Қаржы
- Құрылыс
- Құқық, Криминалистика
- Әдебиет
- Өнер, музыка
- Өнеркәсіп, Өндіріс
Қазақ тілінде жазылған рефераттар, курстық жұмыстар, дипломдық жұмыстар бойынша біздің қор #1 болып табылады.

Ақпарат
Қосымша
Email: info@stud.kz