Техникалық жүйелерді автоматтандыру: өндірістік үрдістер, басқару жүйелері және математикалық модельдер

Қазақстан Республикасының ғылым және білім министрлігі
«Алматы энергетика және байланыс университеті»
Комерциялық емес акционерлік қоғамы
Ш. И. Иманғалиев
ТЕХНИКАЛЫҚ ЖҮЙЕЛЕРДІ АВТОМАТТАНДЫРУ
Оқу құралы
Алматы 2012
УДК 681. 5. 015
ББК 31. 27- 05я73
И 48 Техникалық жүйелерді автоматтандыру
Оқу құралы/Ш. И. Иманғалиев
АЭжБУ. Алматы 2012. -123б.
ISBN 978-601-73-07-06-6
Өндірісті автоматтандыру проблемалары, негізгі түсініктері және жіктеулері қарастырылады. Өндіріс басқару объектісі түрінде бейнеленеді, қасиеттері анықталады, басқару жүйесінің құрылымы нақтыланады және оның типтік буындары мінезделеді. Жылу энергетика саласындағы қарапайым технологиялық объекттер түсіндіріледі және оларға қолданылатын басқару операциялары көрсетіледі. Сонымен бірге өндірістік объекттер мен басқару жүйесі элементтерін бейнелейтін математикалық модельдер (үздіксіз, дискретті) сарапталған. Оқу құралы 5В070200 - «Автоматтандыру және басқару», 5В070300 - «Ақпараттық жүйелер» мамандықтары бойынша оқитын студенттер мен магистранттарға арналған.
Кесте 2, Без. 71, Библиогр. -10 атау.
ББК 31. 27- 05я73
ПІКІР БЕРУШІ: ҚазҰТУ проффессор, техн. ғыл. канд., Жумағалиев Б. А. АЭжБУ доцент, техн. ғыл. канд., Джумагалиев Б. С.
Қазақстан Республикасының Білім және Ғылым министірлігінің 2011 жылғы баспа жоспары бойынша басылады.
ISBN 978-601-73-07-06-6
© Алматы энергетика және байланыс университеті, 2012ж.
Мазмұны
Кіріспе
Уақыт өткен сайын автоматтандыру ұғымы мен түсінігі кеңейе бастайды, оның ішіне кейбір ғылыми және техникалық дамуының жаңа жеке мәселелері кіргізіле басталды. Олар копьютерлеу, робаттау және басқа арнайы немесе салалық жаңа ұғымдар. Дегенмен оның мағынасы және негізгі міндеті өзгермей қалады - ол адамның керітартпалық еңбегін жеңілдету немесе одан босату босату.
Жылу энергетика саласы, технологиялық үрдістерді кеңінен механизациялаумен, жұмыс орталарының жоғары параметрмен, оны реттеудің дәлдігі талаптарымен, сонымен қатар өзіндік энергия көзімен ерекшеленеді. Сондықтан, осы ғылым мен техника саласына автоматты және автоматтандырылған басқару теориясының әдістері және жаңа техникалық құралдары қолданылады. Енді осы айтылғанға байланысты оның жалпы анықтамасын көрсеттік. Механизацияланған өндірісті автоматтандыру деп машиналарды, механизмдерді және қондырғыларды басқару, сонымен қатар арнайы құрылғылардың өлшеуіш құралдар, автоматты реттеуіштер және есептеу машиналары көмегімен олардың жұмыс істеуін бақылауды айтамыз. Ол адамның шектелген ойымен немесе онысызда жүзеге асырылады.
Сіздің назарларыңызға ұсынылған оқу құралы төрт бөлімнен тұрады. Бірінші бөлімде өдірісті автоматтандырудың негізгі мәселелері, түсініктері көрсетілген, сонымен бірге айтылған жүйелер жіктелген. Ал екінші бөлімде өндірістік үрдістердің құрылымы, басқару объектісі түрінде бейнеленді және оның негізгі қасиеттері талданған. Оны автоматтандыруға керекті типтік буындар мінезделген. Үшінші бөлімде жылу энергетика саласындағы қарапайым технологиялық объектер, оларды басқаруға керекті операциялар түсіндірілген. Оқу құралының соңғы бөлімінде өндірістік үрдісті және оны басқару жүйесінің екі түрлі математикалық модельдері берілген. Сонымен бірге бұл оқу құралының соңғы бөлімінде басқару жүйесінің негізгі элементтерін бейнелеуге керекті екі түрлі математикалық модельдер (үздіксіз, дискретті) сарапталған. Оларды түсіндіруге керекті қасиеттері және сандық мысалдары көрсетілген.
1 Өндірісті автоматтандыру мәселелері
1. 1 Негізгі мәселелер, түсініктер және жіктеулер
Қазіргі қоғамның экономикалық дамуының түрлі кезеңдерінде, автоматтандыру өнеркәсіптік және әлеуметтік саланың ең негізгі мәселелерінің бірі болып қалады. Осы саладағы мәселе мен істерді түсіну үшін, алдымен оған керекті ғылыми техникалық жүйе туралы негізгі ұғымдар мен ұстанымдарды қарастыруымыз керек.
Автоматтандыру [1, 3, 9] - техникалық құралдарды, экономика - математикалық әдістерді және басқару жүйесін қолдану арқылы, адамды энергиялар, материалдар немесе ақпараттарды алу, өзгерту, беру және пайдалану үрдістеріне шектеулі немесе тікелей қатысуынан босату. Бұл анықтаманы нақтылай келсек, автоматтандырамыз: технологиялық, энергетикалық, көліктік және басқа өндірістік үрдістерді. Әр өнеркәсіптік өндірістің негізгі технологиялық немесе өндірістік үрдістер болып табылады. Ал біздің қарастыратын өндіріс саласы «жылуэнергетика» деп аталады.
Қазіргі жылу электр станциясында (ЖЭС), жылу және электрлік энергиясын өндіру мен үлестіруге байланысты көп еңбекті үрдістер негізінен механикаландырылған. Енді механикаландырылған өндірісті автоматтандыру деп машиналар, механизмдер жіне қондырғыларды басқаруды, сонымен қатар адамның шектеулі қатысуы немесе қатыспауы арқылы олардың жұмысын арнайы құрылғылар (өлшейтін аспаптар, автоматты реттеуіштер және есептеу машиналары) көмегімен бақылауды айтады.
Механикаландырылған технологияның үрдістері, жұмыс ортасы параметрлерінің жоғарғы деңгейі, оны реттеуіндегі дәлдік тараптары және өзінің энергия қайнар көзі сияқты ерекшеліктері бар жылуэнергетика саласын зерттеуге, автоматтандыруға керекті ғылыми және техника салалары: физика, химия, математика, жылуэнергетика, автоматика, жүйелік талдау, өлшеу, байланыс және есептеу техникалары. Жоғарыда айтылған ғылымдардың бізге керекті ең негізгісі автоматика болып табылады.
Автоматика (гректің αντοματυσ - «өздігінен әрекет ететін» сөзінен) - нәрсесі, адамның тікелей қатысуынсыз түрлі мақсатталған іс - әрекетті жүзеге асыруға арналған әдістер мен құралдардан ғылыми - техникалық сала. Бұл саланың ғылыми негізгі автоматты басқару жүйесі (АБЖ) теориясында көрсетілген. Онда АБЖ - құрылымы, математикалық модельдері, талдау және синтездеу әдіс - амалдары берілген. Енді, соңғы екі жалпылама анықтамаларын енгізейік.
Техникадағы басқару - жұмыс істеуіне қажетті алгоритмдеріне сәйкес, машиналардың, жүйелердің, үрдістердің күйін немесе параметрлерін мақсаттылықпен өзгертуді айтады. Техникалық құралдар өндірістік немесе технологиялық үрдістерді жүзеге асыру үшін қолданатындықтан, басқаруға екінші анықтамасын береміз. Технологиялық үрдістің ішкі күйінің керекті өзгеруін қамтамасыз ететін, ал қозғалатын объектерге - кеңістікте және уақытқа байланысты берілген траекториясымен қозғалатын әсерлер басқару атауының мағынасын білдіреді.
Жүйе - қаланып қойылған мақсаттарға жетуге арналған біріктірілген әр объекттер элементтердің жиынтығы.
Біздің жағдайда өндіріс немесе технологиялық үрдістерге керекті АТЖ болғандықтан, оның негізгі элементтері төмендегідей: машиналар, механизм және қондырғылар, өлшеуіш, байланыс, реттеуіш және есептеуіш құрылғылары мен жабдықтар.
Енді автоматтандырылған техникалық жүйенің (АТЖ) негізгі ұстанымдар қасиетіне және жалпы жіктемесіне тоқталайық. Басқару жүйесін жалпылама қарастырғанда ол екі негізгі элементтен тұрады: басқару объектісі мен басқару құралы. Мұндағы басқару объектісі деп технологиялық және өндірістік үрдісті іске асыратын қандайда болмасын агрегаттарды айтады. Ал басқару құралы, АБЖ басқаруды адамның тікелей қатысуынсыз жүзеге асыратын жалпы өндірістік немесе арнайы комплекстік құралдар болып табылады. Бұл жерде адамның міндетті қызметі автоматты қондырғының (жабдықтың) жұмысын бақылау, үрдісті басқару талабына сай жөндеу және күйге келтіру.
АБЖ-нің жалпы жіктелуі кейбір белгілеріне байланысты орындалады:
1. Басқару құралы мен объектісінің қосылу тәсіліне байланысты ажыратылған және тұйық жүйелер болып бөлінеді. Ажыратылған АБЖ-да басқару құралы объектіге оның күйін есепке алмай әсер етеді. Мұндай жүйелер қарапайым функцияларды орындауға қолданылады (қызмет, әрекет), мысалы жабдықты жүргізу, тоқтату немесе берілген уақыт интервалы (аралығы) арқылы реверсивтеу (қозғалыс бағытын өзгерту), технологиялық операцияларды бірізділік (жүйелік) тапсырыс түрінде орындау (программа - логикалық басқару) .
Тұйық жүйе неғұрлым күрделі, бірақта жетілген жүйе болып есептеледі. Мұнда жұмыс істеу кезінде, басқару құралы объекттің қазіргі (нақтылы, фактілі) күйін ескереді, және оның негізінде объектіге керекті әсер дайындалып іске асырылады. Объект күйі туралы ақпарат кері байланыс арнасы арқылы жеткізіледі, әдетте ол бақылау - өлшеу аспабымен жүзеге асырылады. Осыдан кейін, басқарушы әсерлер тікелей байланыс арнасымен түрлі орындаушы құрылғыларына жеткізідеді.
2. Басқару үрдісіне жұмсалатын қосымша энергияның түріне байланысты, АБЖ электрлік (сонымен бірге электрондық), гидравликалық, пневматикалық және құрамдастырылған болып бөлінеді.
3. Буындар аралық әсер беру сипатына байланысты үздіксіз және периодты (мерзімді) әсерлер жүйелері болып кездеседі. Егер әсерлер алдын -ала тапсырылған уақыт интервалымен жіберілсе, оларды (бұл жүйені) импульстік деп атайды.
Тұйық сұлба түрінде құрастырылатын АБЖ-ның бөлек түрі автоматты реттеу (АРЖ) жүйесі болып келеді. Реттеу деп басқарудың жеке түрін айтады. Мұндағы объекттің шығысын (негізгі технологиялық параметр) тапсырылған (берілген) мәніне жақын ұстап тұрады немесе кейбір берілген заңдылықпен өзгертіледі.
АРЖ төмендегідей түрлері белгілі:
а) Айтылатын жүйеде, өндіріс техноллогиясына сәйкес, объекттің тапсырылған шығыс мәні қызметкермен қойылады. Тұрақтандыру жүйесі технологиялық талаптарға лайықты, оның келесі өзгеруіне дейін, объекттің шығысын тұрақты сақтайды.
б) Программалық реттеу жүйесі, талап етілген уақытқа байланысты заңдылық бойынша, объекттің шығысының тапсырыс мәнін өзгертеді.
в) Оптималды реттеу жүйесінде объекттің шығыс мәні алдын - ала тапсырылмайды. Онда, объекттің ерекшелігіне байланысты, тек жүйенің жұмыс үрдісі кезінде, объектке түрлі бағытта сыналатын әсерлердің бағытында оның шығысын. АБЖ құрамындағы басқару құралы автоматты реттеуіш түрін қабылдайды.
Функционалдық белгісі бойынша АБЖ ені үлкен классқа бөлуге болады - адаптивтік және адаптивтік емес. Соңғы жағдайда АБЖ қызмет істеу үрдісі кезінде басқарушы жабдықтың құрылымы мен параметрлері өзгермейді, немесе олар есептеу және жөнге салуда анықталған күйінде қалады. Бұл жүйені құрудың негізі деп, оның жұмыс істеуінің ішкі және сыртқы жағдайының өзгеру шамасы аз - кем болуын жорамалдау болып табылады. Егер жүйенің ішкі және сыртқы параметрлерінің өзгеру диапазоны өте үлкен болса, онда адаптивті емес жүйенің көмегімен оның қызметін қанағаттандыра алмаймыз. Бұл жағдайда басқару жүйесінің қасиетін өзгертетін үрдіс қолдануға тура келеді. Мұнда, жүйе қызметінің ішкі және сыртқы жағдайының өзгерген кезінде, оның реттеуішінің көрсеткіштері белгілі бір оптималдық мағынада таңдалып алынған соң өзгертіледі. Оны қарапайым сөзбен айтқанда, АБЖ пайда болған жағдайға бейімделінуі болып табылады.
Енді АБЖ сараптауды қысқа түрінде нақтыласақ, оны төмендегі түрінде көрсетуге болады.
қ1. Әсерлер принципі бойынша:
- ажыратылған (сыртқы әсерге байланысты) ;
- тұйық (ауытқуына байланысты) ;
- құрамдастырылған.
қ2. Басқару мақсаты бойынша:
- тұрақтандыру (тұрақты) ;
- программалық (берілген) ;
- қадағалаулық (еркінше) ;
- оптималдық (эксьремалды) .
қ3. Басқару шамаларының санына байланысты:
- бір өлшемді;
- көп өлшемді.
қ4. Басқару тізбегіндегі сигналдар сипатына байланысты:
- үздіксіз (детерминирлік, стохастикалық) ;
- дискреттік (детерминирлік, стохастикалық) .
қ5. Математикалық бейнелеуіне байланысты:
- сызықты;
- бейсызықты;
- айқын;
- айқын емес.
қ6. Параметрлер сипатына байланысты:
- стационарлық;
- стационарлық емес;
- жинақталған (топталған) ;
- бөлінген (үлестірілген) .
1. 2 Жүйенің құрылымы және элементтері
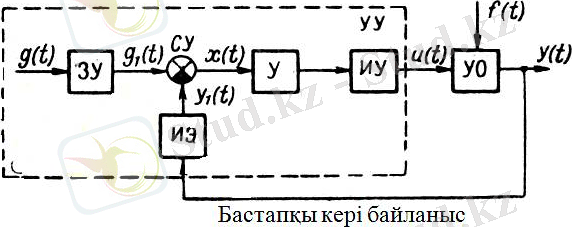
Енді типтік автоматты басқару жүйесінің құрылымын [7, 8, 10] қарастырайық. Ол 1 суретте көрсетілген
а)
 СҚ µ(t)
СҚ µ(t)
f(t) u(t)
g(t) g 1 (t) x(t) z(t)
z 1 (t)
б)
1 сурет - АБЖ типтік функционалдық сұлбасы
1. Өлшейтін қондырғы (элемент) басқару объектісінің (БО) шығысының нақты мәнін өлшейді және оны басқару қондырғысында қолдануға ыңғайлы күйге z 1 (t) түрлендіреді (2 суретті қара) .

2 сурет
2. Тапсырма беруші қондырғы (ТҚ) басқару шамасының талап етілген мәнін анықтайтын тапсырма әсерін қалыптастырады, сонымен бірге оны z 1 (t) шамасымен бір мағыналық болуы үшін түрлендіреді. Себебі g 1 (t), z 1 (t) -мен салыстыруға ыңғайлы болуы қажет. Программалар немесе тапсырылған функционалдық тәуелділіктің тасымалдаушысы түрінде жұдырықты механизм, функционалдық потенциометр, магниттік және кинопленкалар қолданылады. Кейде, тапсырма беруші қондырғы өлшеу және салыстыру қондырғыларымен конструктірлік түрде біріктіріледі.
3. Салыстырмалы қондырғы (СҚ) кең тарамдық жағдайда x(t) = g 1 (t) - z 1 (t) айырмасы өлшенеді. Бұл x(t) , басқару шамасы z(t) -ны, оның тапсырма мәнін g(t) -ден ауытқуына пропорционалды болады (3 суретті қара) .
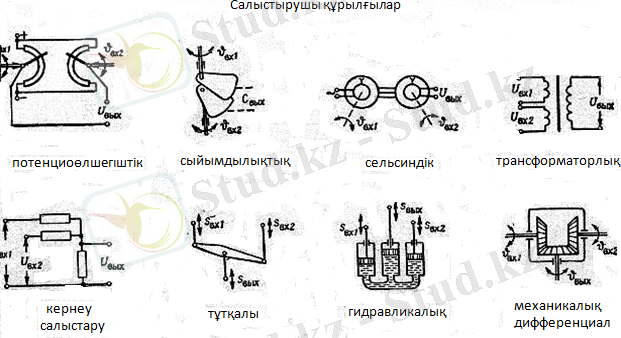
3 сурет
Басқару қондырғысы (БҚ) қателік x(t) , басқару заңдылығы мен мақсатына байланысты басқару сигналын қалыптастырады. Басқару заңдылықтары туралы ақпарат кейінгі бөлімдерде жеткізіледі. Басқару қондырғысында жиі қолданылатын күшейткіштердің сұлбасы 4 суретте көрсетілген.
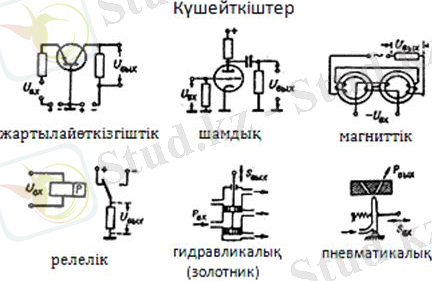
4 сурет
Орындаушы механизм (ОМ) басқарылатын объектіге басқару әсерін дайындайды және жібереді (5 суретті қара) .
5 сурет
Сонымен бірге, басқару қондырғысының құрамына арнайы түзетуші (демпфирование іске асырушы) элементтер қосылады. Олар басқарудың сапасын жақсартады.
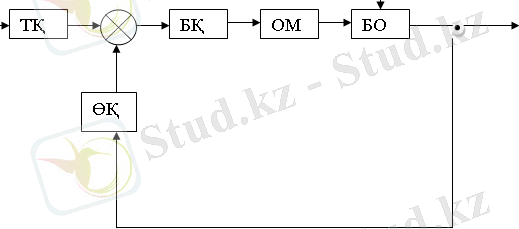
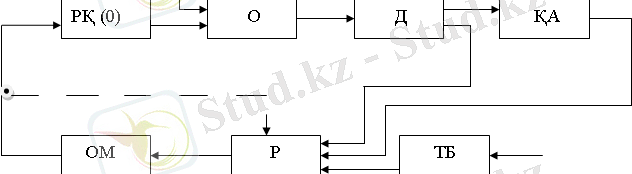
Енді өндрістік автоматты басқару (реттеу) жүйесінің функционалдық сұлбасымен таныстырасыз. Ол төменде көрсетілген
 f
f
z
z
ОМ - орындаушы механизм
РҚ(0) - реттеуші құрал (орган)
О - объект
Д - датчик (өлшеуіш тетік)
Р - реттеуіш
ҚА - қосымша аспап
Т - тапсырма беруші
КБ - кері байланыс
6 сурет
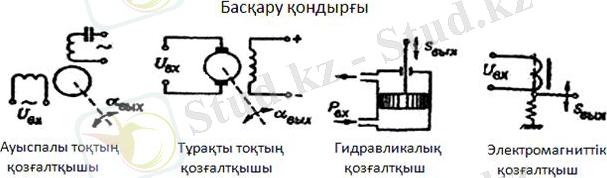
Онда объекттің шығыс мәні реттеуішке екі жолмен жіберіледі: 1-датчиктен, 2 - қосымша аспаптан. Ауқытқу деп объектіге сырттан әсер (бұл жүйеге байланысы жоқ) ететін қандайда болмасын факторды айтады. Оның әсерінен объекттің шығысы тапсырылған мәнінен ауытқиды. Автоматты реттеуіштің өндірістік үлгісінде оның құрамына салыстырушы элемент пен күшейткіш кіреді. Реттеуші орган объекттің шығысына жіберілетін реттеуіштің әсерін жүзеге асырады. Екеуінің ортасында орындаушы механизм орналасқан. Бұлардың екі түрі болады: а) электрлік (шығыс реттеуіші бар электрқозғалтқыш) ; б) гидро - немесе пневмоцилиндр, мұндағы поршень сұйықтың немесе сығылған ауа әсерінің көмегімен қозғалады (орнын ауыстырады) .
1. 3 Автоматтандырылған басқару жүйесі
Өндірістің қызметіне талдау жасау үшін оны кішігірім бөліктерге бөлу қажет. Ол түрлі иерархиялық белгілермен [1, 9] жүзеге асырылады.
1. Уақыт иерархиясы. Басқарылатын объекттің күйі жөніндегі ақпараттың түсуінен басқару әсеріне дейінгі уақыт аралығын (интервалын) бұл иерархиянын белгісі деп қарастырамыз. Олар іс жүзіндегі (нақтылы) уақыт, 1 сағат, 1 ауысым, 1 күн, 1 декада, 1 ай, 1 квартал, 1 жыл.
2. Кеңістік иерархиясы. Басқарылатын объекттің орналасқан ауданы оның белгісі болып табылады. (Бірлескен өндіріс, өндіріс, цех, бөлімше) .
3. Функционалдық иерархия. Ол жүйе элементтерінің функционалдық
бағыныштылығына байланысты жүзеге асырылады. (Президент, басты инженер, вице-президент, технология, экономика, техника және автоматика бөлімдері) .
4. Ситуациялық иерархия. Ол өндірісте болатын жағдай тудыратын салдарына байланысты жасалады.
5. Информациялық иерархия. Басқаруға керек информацияның мәні оның (жауаптылығына) жаңартылуына және жеделділігіне байланысты іске асырылады.
Автоматтандырылған басқару жүйесін қолданудың төмендегідей өзгешеліктері бар. Олар: ақпараттың әдіс - амал (ақпаратты өңдеу), ықтималды әдіс (ішкі және сыртқы ықтимал ықпалды әсерді еске алу), жүйелік әдіс, адамды басқару контурына енгізу.
Қандайда болмасын үрдістерді басқару төрт түрге бөлінеді: автоматты, тікелей санды басқару, супервизорлы, адам - машиналы. Олардың бірінші түрін 1. 2 параграфта толық түсіндірдік.
2. Тікелей санды басқарудың жалпы құрылымы
 Кіріс Шығыс
Кіріс Шығыс
Өлшеу Басқару
7 сурет
3. Супервизорлы басқару.
 Кіріс Шығыс
Кіріс Шығыс
Басқару
Өлшеу
8 сурет
Реттеуішке тапсырма
4. Адам - машиналы басқару
 Кіріс Шығыс
Кіріс Шығыс
Басқару 1
Басқару 2 9 сурет
Реттеуішке тапсырм
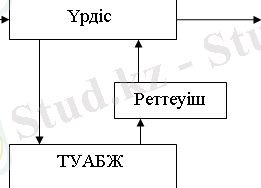
ТУ АБЖ - дегеніміз адам мен машинадан тұратын басқару жүйесі. Бұл жүйе технологиялық объектіні қабылданған күштерге сәйкес оны оптималды басқару үшін ақпаратты жинау және өңдеуді қамтамасыз етеді.
ТУ АБЖ міндетті қызметі - басқару, ақпараттандыру және қосымша істер болып бөлінеді.
ТУ АБЖ құрамын, өз қызметін атқару үшін керекті төменде келтірілетін бөліктердің қарым - қатынасы түрінде қарастыруға болады. Олар:
1) Техникалық қамтамасыздандыру.
2) Ақпараттық қамтамасыздандыру.
3) Программалық қамтамасыздандыру.
4) Ұйымдастырулық қамтамасыздандыру.
5) Оперативтік қызметкерлер.
ТУ АБЖ сараптау.
1. Жүйенің өнеркәсіп құрылымындағы орналасқан деңгейіне байланысты.
а) Төменгі деңгейдегі ТУ АБЖ (технологиялық агрегат, участок) .
б) Жоғарғы деңгейдегі ТУ АБЖ (цех, өндіріс) .
в) Көп деңгейлі ТУ АБЖ.
2. Басқарылатын технологиялық үрдістің өту уақытына байланысты
а) Үздіксіз ТУ АБЖ.
б) Үздік ТУ АБЖ.
в) Үздіксіз - үздік ТУ АБЖ.
3. Басқарылатын технологиялық объекттің ақпарат қуаты (көлемі) шартына байланысты
а) ең кіші 10-40;
б) кіші 41-160;
в) орташа 161-650;
г) жоғары 651-2500;
д) үлкен 2501 және одан көп.
4. ТУ АБЖ жұмыс істеу түріне байланысты (қызмет)
а) ақпараттық;
б) локалды - автоматты;
в) кеңес беретін;
г) автоматты.
2 Өндірістік үрдістерді структуризациялау
2. 1 Өндірістік үрдістің басқару объектісі
Кәсіпорынның ерекше элементтері [1, 2, 4] :
1) Еңбек заты - шығарылатын өнімнің құрамына кіретін материалдық объектер.
2) Еңбек әдісі немесе тәсілі - еңбек затын өңдеуге арналған станоктар, құрал-жабдықтар және орындары.
3) Кіріс қорын шығарылатын өнімге айналдыратын әрекет жиынын технологиялық үрдіс деп атайды.
Өндірістегі (фирмадағы) материалдық және экономикалық қарым - қатынастар жиынын өндірістік қарым - қатынастар деп атайды.
 А В
А В
Q k Q ш
У И
U Y
10 сурет - Басқару жүйесінің ірілендірілген құрылымы
Q k - еңбек затының құрылымы.
Q ш - өңдеу арқылы пайда болатын еңбек өнімі.
А - шығын жиынтығы (электр энергиясы, бу, жұмыс күші және т. б. ) .
В - қосымша компонеттер жиынтығы (қосымша бөлшектер, майлау материалдары және т. б. ) .
Х - ішкі күйінің параметрлері.
Y - сыртқы әсерлер (брак, құралдар мен жұмыс күшінің жоғарлауы) .
U - басқару әсерінің параметрлері.
Өндірісті басқару үрдісін үш негізгі деңгейге бөлуге болады:
1) Технологиялық үрдісті басқару деп оның ішкі күйі мен сыртқы әсеріне байланысты басқару заңдылығын оптимальді қолдануды айтады.
2) Еңбек әдісі және затын (нәрсесін), өндірістік қарым - қатынастарды басқару деп оларды тиімді пайдалануды айтады.
3) Объектті ұйымдастыру және экономикалық басқару дегеніміз оның тиімді критерийін оптимальдік мәніне жеткізу.
Өндірісті басқарудың түрлі құрылымдары бар: сызықты, функционалды, сызықты - сынықтылық, сызықты - функционалды, матрицалық.
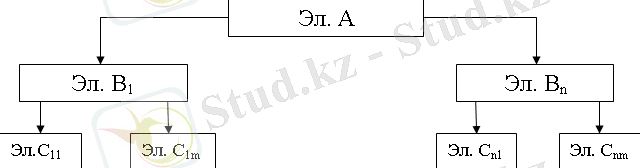
11 сурет - Сызықты құрылым
Эл. - элемент
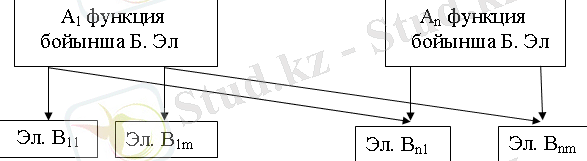
12 сурет - Функционалды құрылым
Б. Эл - басқарушы элемент
. .
Сын. - сынықты Эл. -элемент
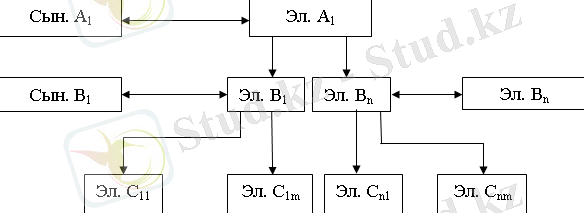
13 сурет - Сызықты-функционалды құрылым
Бас. - басшы, Эл. - элемент
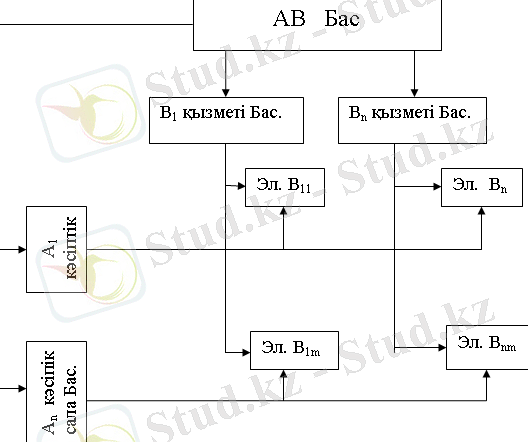
14 сурет - Матрицалық құрылым
Енді нақты өндірістік объекттерді қарастырайық. Мұндағы реттелетін объекттің динамикалық қасиеттерін кейбір жағдайда сызықты дифференциалдық теңдеу арқылы арқылы көрсетуге болады. Ол объекттің кіріс және шығыс мәндерінің функционалдық тәуелділігін бейнелейді. Объекттің орнықты емес үрдісін анықтайтын дифференциалдық теңдеу оның физикалық заңдылықтар негізінде құрылады. Қарапайым объекттің (15 суретті қара) дифференциалдық теңдеуін мысал ретінде қарастырамыз.
Ыдысқа су Q 1 мөлшерде (көлем өлшемі/сек) құйылды және Q 2 мөлшерде жұмсалады (шығындалады) . Енді белгілеу енгізейік:
∆h -деңгейдің тапсырылған мәнінен ауытқуы;
F - ыдыстың көлденең ауданы.
Объекттің тепе - теңдігі судың құйылу және ағып кету теңдігімен сипатталады.
 . (2. 1)
. (2. 1)
Сонымен бірге тапсырылған мәнінен ауытқуы (∆h) мен ыдысқа құйылған немесе жұмсалатын судың мөлшері өзергенде оның деңгейіде өзгереді.
Егер
 ,
(2. 2)
,
(2. 2)

деп қабылданса, онда
 . (2. 3)
. (2. 3)
Қарастырылған мысалда, судың шығыны ыдыстың биіктігіне тәуелді
 . (2. 4)
. (2. 4)
Егер ∆h азғана болғанда, онда бірінші жуықтағанда мәні
 . (2. 5)
. (2. 5)
Мұндағы
 - тұрақты коэффициент.
- тұрақты коэффициент.
Осыны ескере отырып, (3) теңдеуді осылай жазуға болады
 . (2. 6)
. (2. 6)
Әрі қарай, көп таралған белгілеулерге көшсек
 - уақыттың қазіргі сәтіндегі реттелетін шаманың тапсырылған мәнінен ауытқуы,
- уақыттың қазіргі сәтіндегі реттелетін шаманың тапсырылған мәнінен ауытқуы,
 -уақыттың қазіргі сәтіндегі сұйықтықтың құйылуының өзгеруі.
-уақыттың қазіргі сәтіндегі сұйықтықтың құйылуының өзгеруі.
Онда (2. 6) теңдеуді төмендегі түрде көрсетуге болады
 . (2. 7)
. (2. 7)
Мұндағы
 - тұрақты уақыты (сек) ;
- тұрақты уақыты (сек) ;
 - объекттің күшейту коэффициенті (реттелетін шаманың берілген әсерден кейінгі орнықты ауытқуы бірге тең болады.
- объекттің күшейту коэффициенті (реттелетін шаманың берілген әсерден кейінгі орнықты ауытқуы бірге тең болады.
Қарапайым объекттің, дифференциалды теңдеу түріндегі басқаша жазылу формасы кейбір әдебиеттерде төмендегідей
 . (2. 8)
. (2. 8)
Мұндағы
 - объекттің өзін - өзі туралау (түзету) коэффициенті
- объекттің өзін - өзі туралау (түзету) коэффициенті
 - екпін (ұмтылыс) жылдамдығы (уақыттың бастапқы сәтінде, әсердің бірге тең болған кезіндегі реттелетін шаманың өзгеру жылдамдығы) .
- екпін (ұмтылыс) жылдамдығы (уақыттың бастапқы сәтінде, әсердің бірге тең болған кезіндегі реттелетін шаманың өзгеру жылдамдығы) .
Дифференциалдық теңдеу көмегімен объекттің динамикалық қасиеттері тек біршама қарапайым объекттер болғанда ғана жүзеге асырылады.
Енді «қозғалтқыш - жұмыс машинасы» жүйесінің математикалық бейнесін қарастырайық.
Энергияның сақталу заңдылығына сәйкес бар болады
 , (2. 9)
, (2. 9)
Сіз бұл жұмысты біздің қосымшамыз арқылы толығымен тегін көре аласыз.
- Іс жүргізу
- Автоматтандыру, Техника
- Алғашқы әскери дайындық
- Астрономия
- Ауыл шаруашылығы
- Банк ісі
- Бизнесті бағалау
- Биология
- Бухгалтерлік іс
- Валеология
- Ветеринария
- География
- Геология, Геофизика, Геодезия
- Дін
- Ет, сүт, шарап өнімдері
- Жалпы тарих
- Жер кадастрі, Жылжымайтын мүлік
- Журналистика
- Информатика
- Кеден ісі
- Маркетинг
- Математика, Геометрия
- Медицина
- Мемлекеттік басқару
- Менеджмент
- Мұнай, Газ
- Мұрағат ісі
- Мәдениеттану
- ОБЖ (Основы безопасности жизнедеятельности)
- Педагогика
- Полиграфия
- Психология
- Салық
- Саясаттану
- Сақтандыру
- Сертификаттау, стандарттау
- Социология, Демография
- Спорт
- Статистика
- Тілтану, Филология
- Тарихи тұлғалар
- Тау-кен ісі
- Транспорт
- Туризм
- Физика
- Философия
- Халықаралық қатынастар
- Химия
- Экология, Қоршаған ортаны қорғау
- Экономика
- Экономикалық география
- Электротехника
- Қазақстан тарихы
- Қаржы
- Құрылыс
- Құқық, Криминалистика
- Әдебиет
- Өнер, музыка
- Өнеркәсіп, Өндіріс
Қазақ тілінде жазылған рефераттар, курстық жұмыстар, дипломдық жұмыстар бойынша біздің қор #1 болып табылады.

Ақпарат
Қосымша
Email: info@stud.kz