Адам қозғалысын басқару: нейропротездер мен ми-компьютерлік интерфейстер

ҚР БІЛІМ ЖӘНЕ ҒЫЛЫМ МИНИСТРЛІГІ
Семей қаласының Шәкәрім атындағы Мемлекеттік Университеті
«Автоматика және ақпараттық технологиялар» кафедрасы
СӨЖ 3
Тақырыбы: Адам қозғалысын басқару
Пән: Мехатроника және робототехника
Дайындаған: Абылқаиров Әділет(АУ-801)
Тексерген: Секербаева А. Б.
Семей 2019
Жоспар:
1) Адам қозғалысын басқару . . . 2
1. 1) Сигналды ұстау . . . 2
1. 2) Роботтардың өзін-өзі үйрету . . . 3
2) Оймен басқару . . . 4
3) Қорытынды . . . 7
1. Адам қозғалысын басқару
Қолдарын немесе аяқтарын жоғалтқан адамдарда толыққанды өмірге оралудың нақты мүмкіндігі пайда болды. Бұл адам ойының Күшін басқаруға болатын модульдік нейропротездің арқасында мүмкін болды.
Соңғы уақытқа дейін протездер адам денесіне механикалық бекітілген және жүйке жүйесімен ешқандай байланысы жоқ. Олар өздерінің темір топсалары-буындарында бүгілуі мүмкін, бірақ әрбір қозғалысты орындау үшін иесіне кері байланысты қолмен қамтамасыз ете отырып, өз протезінің мінез-құлқын сол немесе басқа жолмен реттеу керек еді. Осылайша, адам өз аяғының алдында шалшық су және оны айналып өту керек екенін, ал қол - жұмыртқаны мұқият алып, жұмыртқаны дайындау немесе керісінше, қолмен құрал-сайманды қатты қысу керек екенін айтты. Адамды жаңа аяқты басқаруға үйрету үшін ұзақ уақыт қажет болды, және командалардың жиыны өте шектеулі болды, сондықтан ұсақ моторика жақсы болуды қалайды.
- Сигналды ұстау
Адам қолсыз саусақпен жүргісі келсе, ми қолдың бұлшық етіне апаратын жүйке арқылы жүретін тиісті сигнал жасайды. Бірақ қол жоқ болғандықтан, сигнал "бос" кетеді. Бірақ, егер бір жерде жүйке импульстерін "ұстап" жолы бойынша болса және осы негізде деректерді талдау мен өңдеуден кейін роботталған қолмен басқару пәрмендерін қалыптастыру қандай? Дәл осы жолмен жүйке сигналдарын санайтын және оларды қозғалысқа түрлендіретін протездерді әзірлеуге ұмтыла отырып, көптеген ғылыми топтар барады.
Американдық Хьюстон университетінде және Райс университетінде бас терісіндегі электродтардың көмегімен электроэнцефалография (ЭЭГ) әдісімен моторлы нерв сигналдарын алып тастаумен эксперименттер жүргізілді. Күрделілік, ЭЭГ-бұл әртүрлі сигналдардың көп саны, және олардың арасында аяқ-қол қозғалысын басқаратын, пішен тоғысындағы ине іздегендей бөлу міндеті.
Гетеборгтағы Чалмерс техникалық университетінің зерттеушілері NEBIAS консорциумының (бірнеше еуропалық университеттердің жобасы) әріптестерімен бірге басқа жолмен жүрді. Электродтарды терінің бетіне орналастыру орнына, пайдалы сигнал қатты толған жерде ғалымдар электродтарды тері астына тігу арқылы кедергінің әсерін азайтуға тырысты. Бірақ әр адамның физиологиясы жеке, және "сигнал-шу"барынша ара қатынасы үшін электродтарды қай жерде орналастыру керек деп алдын ала айтуға болмайды.
1. 2. Роботтарды өзін-өзі үйрету
Қазіргі уақытта бионикалық протездерді басқарудың ең перспективалы әдісі деп бұлшықеттерден культи - электромиография (ЭМГ) электр потенциалдарын оқу саналады. Мұндай жоғары технологиялық протездер зертханалардан тыс шығып, сериялық түрде шығарылады. Алайда, науқасты протезді дұрыс басқаруға үйрету-әлі де күрделі мәселе.
Мәскеу физика-техникалық институтының Қолданбалы кибернетикалық жүйелер зертханасында бұл мәселені басынан аяқтарға бұруға тырысады, яғни протезді адам миының командаларын дұрыс түсінуге "үйрету". Зертхана меңгерушісі Тимур Бергалиев бастаған МФТИ студенттері мен аспиранттарынан тұратын GalvaniBionix командасы бұлшықеттерден электр потенциалдарын оқу үшін электродтардың бір жұбын ғана емес, көпшілігін пайдаланады. Мұндай тәсіл пайдалы сигнал деңгейін айтарлықтай арттыруға қол жеткізуге және "өзін-өзі оқыту"алгоритмдерін іске асыруға мүмкіндік береді. Әр түрлі электродтардан келген сигналдардың әрбір комбинациясы қолдың белгілі бір іс-қимылына сәйкес келеді, ал тапсырма жаңа импульстер жинағын алу кезінде жүйе қолданатын сәйкестік кітапханасын құру. "Бағдарламалық қамтамасыз ету ми командаларын дұрыс тануды үйренеді, - деп түсіндіреді Берғалиев. - Бізге көрсетіп, жұмыс қабілеттілігі прототип жүйесі: адам ампутированной конечностью "көмегімен бұлшық сигналдар" еді жылжытуға меңзерді экранда. Бұдан әрі біз әртүрлі сигналдардың комбинацияларын тіркеу жиілігін талдау үшін және осы деректердің көмегімен тануды жақсарту үшін машиналық оқыту алгоритмдерін пайдалануды жоспарлап отырмыз".
2. Оймен басқару
"Ой-басқару" бойынша жануарлармен эксперимент түрлі құрылғылармен мидың қалай жұмыс істейтіні және оны әмбебап "басқару пульті"ретінде пайдалану бойынша қандай мүмкіндіктер болатыны туралы көптеген жаңа білім берді. Бірақ адаммен жұмыс істейтін зерттеушілердің алдында тұрған және тұрған ең жақын міндет-қоршаған ортамен толыққанды өзара іс-қимыл жасау үшін парализді адамдар пайдалана алатын құрылғыларды жасау.
1990 жылы Рой Бэкэй және Филипп Кеннеди мидан сигналдарды "алу" бойынша өз тәжірибелерін бастады. 1996 жылы Атланта қаласында (Эмери университетінде) олар үмітсіз науқас адамдардың қатысуымен екі эксперимент өткізуге рұқсат алды. Бірінші тәжірибені аяқтау мүмкін емес - оған қатысқан әйел көп ұзамай қайтыс болды. Екінші сәтті өтті. 1998 жылы суретші және музыкант Джонни Рей (1944-2002), ми діңінің жарақатына байланысты ауыр салданған ("жабық адам" синдромы), ми мен компьютердің байланысуының пионері болды.
Оның миына микроэлектрод (микросхема түйіспелерінің жүйке тіндерімен өсуді тудыратын синтезделген заттар қолданылды), ол компьютермен біріктірілді. Бұл қозғалыстарға сәйкес келетін жүйке импульстері компьютер экранында курсорды басқаруға бағдарламаланған.
Эксперимент көрсеткендей, адам Дюка институтында маймыл сияқты оқыды. Жаттығулардан кейін Рэй курсорды басқара алды, әріптер бойынша мәтін теріп, тіпті музыкалық сигналдарды жасай алды. Бэкэй мен Кеннеди курсорды басқарғанда сезінеді деп сұрады кезде, ол «ештеңе» деп баяу жазған
Осыған ұқсас эксперименттер бірнеше рет қайталанды, бірақ әлдеқайда арзан және қауіпсіз пайдалану жаппай болды.
Компьютерді "ойлы" басқарудың алғашқы күрделі жүйелерінің бірі 2006 жылы Питер Бруннердің басшылығымен Wadsworth Center (Нью-Йорк штаты, АҚШ) ұжымымен әзірленген мәтінді теруге арналған бағдарламалық-аппараттық кешен болды.
Бұл жүйе үйде қолдануға толық бейімделген және 24 контактімен ЭЭГ алып тастау дулыға, арнайы сигнал түрлендіргіш және кәдімгі ноутбук.
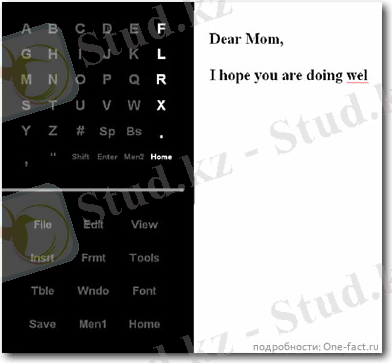
Ал мәтін теру жылдамдығы шамамен 15 секундта бір символды құраса да, бұл бірнеше салданып қалған адамдарға сыртқы әлеммен қарым-қатынас жасауға мүмкіндік берген серпіліс болды. Олардың арасында, мысалы, 48 жасар нейробиолог, бүйірлік амиотрофиялық склерозға шалдыққан, ол қолмен де, көзмен де қозғала алмады. Ми-компьютерлік интерфейсті пайдалана отырып, ғалым өз жұмысын жалғастыра алды…
Өз миында "қайраңнан" шығуға көмектесетін параллельді бағыт - бұл фМРТ көмегімен адамның миынан бейнені (және статикалық, және бейне) тікелей "алу" бойынша тәжірибе. Мысалы, 2008 жылдың нәтижелері адам алдында көрген әріптерді бір мағыналы тануға мүмкіндік берді және егер де "қиялға" адамның суреттерімен бірдей жасай алатын болса, перспективалар фантастикалық ашылуда
2000 жылдың басында ЭЭГ негізінде ми-компьютерлік интерфейстің көмегімен мүгедектер арбасын басқару жүйесінің бірнеше тәжірибелік үлгілері жасалды. Бірақ олардың барлығы аз тану дәлдігіне және жоғары уақытша кідіріске ие болды, ал бұл өте маңызды - кешігу бағасы және кез келген қозғалыс құралын басқару кезіндегі қателіктер өте үлкен. Тек 2009 жылға қарай командаларды дұрыс тану және сигналдарды өңдеудің қолайлы жылдамдығының 90% - дан астамына қол жеткізілді…
Ең алғашқы мүгедек арбалардың бірін Toyota компаниясы мен жапондық RIKEN зерттеу қорының әзірлеушілері ұсынды.
Қарапайым ЭЭГ-шлемді пайдалана отырып, олар сигналды өңдеу алгоритмдерін жетілдірді, бұл жүйе секундына 8 командаға дейінгі жылдамдықпен жұмыс істей алады. Бұл ретте дәлдік 95% - дан астам болды.
... жалғасыСіз бұл жұмысты біздің қосымшамыз арқылы толығымен тегін көре аласыз.
- Іс жүргізу
- Автоматтандыру, Техника
- Алғашқы әскери дайындық
- Астрономия
- Ауыл шаруашылығы
- Банк ісі
- Бизнесті бағалау
- Биология
- Бухгалтерлік іс
- Валеология
- Ветеринария
- География
- Геология, Геофизика, Геодезия
- Дін
- Ет, сүт, шарап өнімдері
- Жалпы тарих
- Жер кадастрі, Жылжымайтын мүлік
- Журналистика
- Информатика
- Кеден ісі
- Маркетинг
- Математика, Геометрия
- Медицина
- Мемлекеттік басқару
- Менеджмент
- Мұнай, Газ
- Мұрағат ісі
- Мәдениеттану
- ОБЖ (Основы безопасности жизнедеятельности)
- Педагогика
- Полиграфия
- Психология
- Салық
- Саясаттану
- Сақтандыру
- Сертификаттау, стандарттау
- Социология, Демография
- Спорт
- Статистика
- Тілтану, Филология
- Тарихи тұлғалар
- Тау-кен ісі
- Транспорт
- Туризм
- Физика
- Философия
- Халықаралық қатынастар
- Химия
- Экология, Қоршаған ортаны қорғау
- Экономика
- Экономикалық география
- Электротехника
- Қазақстан тарихы
- Қаржы
- Құрылыс
- Құқық, Криминалистика
- Әдебиет
- Өнер, музыка
- Өнеркәсіп, Өндіріс
Қазақ тілінде жазылған рефераттар, курстық жұмыстар, дипломдық жұмыстар бойынша біздің қор #1 болып табылады.

Ақпарат
Қосымша
Email: info@stud.kz