Электр жетегін автоматты басқарудың сандық және санды аналогты жүйелері

Мазмұны
Кіріспе
Автоматиканың құралдары кез келген технологикалық процестерді жаңа, өте жоғарғы деңгейде жетілдіреді және технологиялық процестерді енгізу тиімділігін жоғарлатады. Сонымен қатар автоматтандырылған электр жетегі жұмыс машиналарын және өндірістік процестерді автоматтандырудың негізгі құралдары болып саналады [1, 2, 3, 4] .
Автоматтандырылған электр жетегі қазіргі кезде автоматты басқару жүйесінен тұрады. Автоматты басқару жүйесі процесті басқарудың өте күрделі автоматты жүйесінен тұрады. Мұндай күрделі жүйе өндірістік процестердің өту жағдайы туралы ақпараттарды жинап, оны берілген «алгоритммен» өңдеп және өндірістік процестердің орынды жүргізілуін қамтамасыз ететін электр машиналарымен немесе басқа элементтермен басқару әсерін береді. Мұнда алгоритм дегеніміз берілген процестегі өзгерістерге бағынатын логикалық және математикалық ережелер. Қарапайым жағдайларда алгоритм автоматты іске қосу немесе электр қозғалтқыштарын тоқтату міндетін атқарады. Өте күрделі электр жетегін басқару жүйелерінде әртүрлі ұйтқу кезінде жоғарғы пайдалы әсерлі коэффицентті қамтамасыз ететін басқару объектісінің және автоматты басқарудың п. ә. к. есептеу қажет болады.
Машиналарды сандық басқару кең дамығандықтан қазіргі кезде электр жетегін басқару жүйелері аппаратты құрылғылармен емес, ал электр жетегінің қажетті алгоритмдік басқаруы бағдарламалық болатын машиналар қолданылады. Бұл мұндай жүйелерді жобалап және орындауға көмектеседі. Сонымен қатар, бірдей ақпаратты басқару кешенінен бірдей технологиялық процеспен байланысқан, икемді басқарылатын өндірісті құру үшін қажетті үлкен өндірістік құрылғылардың электр жететерін басқаруға мүмкіндік береді. Электр жетегі жүйелерінде машиналарды сандық басқарудың қолданылуына байланысты, дисплейде электр жетегінің жұмысын бақылау және диагностикалық жүйені құру сияқты олардың жұмыстарына жаңа мүмкіндіктер туады. Берілген дәріс жинағында сандық басқару жүйесі ғана емес, сонымен қатар сандық жүйені құратын аналогты жүйе де қарастырылған. Электр жетегінің қазіргі кездегі күрделі басқару жүйесінің даму кезеңдері және олардың талдау мен синтез әдістері мазмұнында көрсетілген.
1 дәріс. Электр жетегін автоматты басқару жүйесінің сандық және санды аналогты жүйесін құру принципі
Дәрістің мазмұны:
- автоматты электр жетегін басқару жүйесіндегі (АЭЖБЖ) сандық және санды аналогты жүйенің негізгі анықтамалары;
- аналогты сигналдардың дискреттік сигналға түрленуі және дискреттік сигналдардың аналогты сигналдарға түрленуі;
- ЭЖБЖ негізгі функционалдық элементтері.
Жұмыстың мақсаттары:
- аналогты сигналдардың дискреттік сигналдарға және керісінше түрлену әдістерін игеру;
- ЭЖАБЖ негізгі функционалдық элементтерінің анықтамасын оқу;
- ЭЖАБЖ құрылымдық сұлбаларын тұрғызу принциптерін меңгеру.
Электр жетегін аналогты жүйемен басқару арқылы орындалатын жылдамдықты 1 - 0, 5 % нақты тұрақтандыруы кейбір өндірістік механизмдеріне қажетті 0, 1 - 0, 01 % нақты тұрақтылықты қамтамасыздандыра алмайды. Бұл аналогты датчиктармен, жылдамдық датчиктарының координатты тұрақтандыру мәндерін нақты өлшей алмағандығынан және салыстыру (күшейткіштер) аналогты құрылғылардың дреф нөлі болғандықтан кері байланысты және берілген аз сигналдарды нақты салыстыру қаблетсіздігінен болады. Мұндай кемшіліктер, координатты 0, 01 % және одан да жоғарғы пайызда нақты реттейтін сандық басқару жүйесін құратын сандық құрылғыларда болмайды.
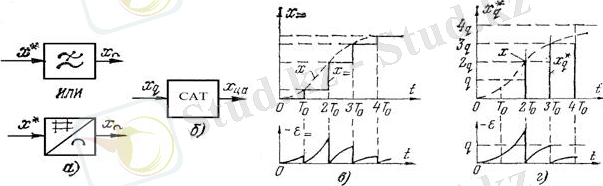
Әдетте, электр жетегін жүйемен басқару электр жетегінің координатын бақылаумен жүзеге асады. Мысалы, жылдамдықты және басқару объектісінің жағдайын (жұмыс машинасының атқарушы органдары ЖМАО) бақылау, оның жағдайы ЭЖЖД мен КБЖД датчиктердің көмегімен орындалады (1. 1 суретке қараңыз) . Мұндай жүйелерде (санды сигналды аналогты сигналға түрлендіретін) санды аналогты түрлендіргішпен (САТ) сандық беріліс құрылғысының қолданылуы (БҚ) берілетін әсерлердің дәлдігін жоғарылатады және оның нақты индикациясын орындайды (1. 1, а суретін қараңыз) . Беру сандық құрылғысы (БС), КБЖД кері байланысы және санды аналогты түрлендіргішпен (САТ) салыстыру құрылғысының (СҚ) (1. 1, б суретке қараңыз) қолданылуы толық дәл реттеуді жоғарылатады. Сонымен қатар сандық жүйеде электр жетегін аналогты жүйемен (1. 1, в суретке қараңыз), толық сандық немесе аналогты (1. 1, г суретін қараңыз) реттеумен (АР) басқарудың нақты сандық реттеуі (СР) қолданылады.
Құрылғылардың сандық және аналогты болып бөлінуі, осы құрылғылармен өңделген ақпараттың көрсетілу түріне және осы құрылғыларды құру үшін қажетті аппараттарға байланысты. Айнымалы аналогты түрі әртүрлі физикалық шамаларға (кернеу, ток, жылдамдық, жиілік, біліктің айналу бұрышы және т. б. ) тура пропорционалдығымен сипатталады. Сандық түрі тек ғана 0 және 1 сандарды қолданып, шаманы сандық кодпен сипаттайды. Санды жазған кезде біртұтас код арқылы санды білдіретін және санды тізбектей ілестіретін қажетті импульстар санымен қамтамасыздандырылады.
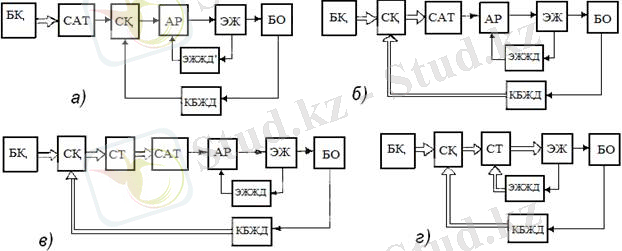
а - санды беру; б - санды беру және жағдайды бақылау; в - жағдайды санмен басқару; г - жағдайды және жылдамдықты санмен басқару.
1. 1 сурет - Электр жетегін санды аналогты басқару жүйесі
Сигналды сан ретінде қарастырсақ, аналогты сигналдың деңгейі анықталған дискреттік уақыт немесе сигнал деңгейінің аралығында пайда болады. Онда аналогты сигналдың үздіксіз функциясы сатылы функцияға айналады. Бұл операция сигналдың квантталуы деп аталады [6] . Егер дискреттелу Т 0 әртүрлі уақыт аралығында орындалса, онда мұндай квантталу уақыт бойынша квантталу деп аталады (1. 2, а суретіне қараңыз), ал егер дискреттелу q мәні әртүрлі болғанда, шығыс сигналы бойынша квантталу болса, онда деңгей бойынша квантталу деп аталады (1. 3, а суретін қараңыз) . Т 0 және q аралығы квантталу қадамы деп аталады.

а - үздіксіз функция; б -торлы функция; в - импульсті элементтің шартты белгісі; г - амплитуда-импульсті модуляция; д - ендiк-импульстi модуляция. 1. 2 сурет - Уақытпен шамаларды дискретизациялау
Уақыт бойынша кванттаған кезде үздіксіз сигнал (1. 2, а суретін қараңыз) торлы түрге өзгереді (1. 2, б суретін қараңыз)
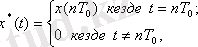
мұндағы Т 0 - дискреттік аралық.
Бұл операция импульстік элементпен (дискретизатормен) орындалады. Оның шартты белгіленуі 1. 2, в суретінде көрсетілген. Әдетте, дискретизатор ретінде модулятор қолданылады. Импульстардың амплетудасы (1. 2, г суретін қараңыз, амплитуда-импульсті модуляция - АИМ), импульстардың ұзақтығы, көлемі және т. б. бойынша үздіксіз кіріс сигналымен дискреттік аралықта Т 0 импульлстардың тізбектігін модульдейді (1. 2, д суретін қараңыз, көлем-импульсті модуляция - КИМ) . Сонымен қатар импульсті ілестіру жиілігі бойынша модуляция (ЖИМ-жиіллікті импульсті модуляция) қолданылады, ал фаза импульстері бойынша фаза импульсті модуляция (ФИМ) қолданылады.
Жиілікті кванттау дискретизациясының нәтижесінде
 о
=2
о
=2
 /То=2
f
о
дискретті функция мына формуламен анықталады
/То=2
f
о
дискретті функция мына формуламен анықталады

(1. 2)
х(0) =0
болғанда жазылған
дискретті функция
п=0
кезде (1. 2) теңдеу арқылы алынған
о
жиілігінің пайдалы сигналын құрады. Дискреттік моменттер арасындағы аралықта ақпараттың жоғалуынан
пТ
0
-ден жиілікпен солға және оңға ығысқан көлденең жоғарғы жиілікті гармоникалар пайда болады.
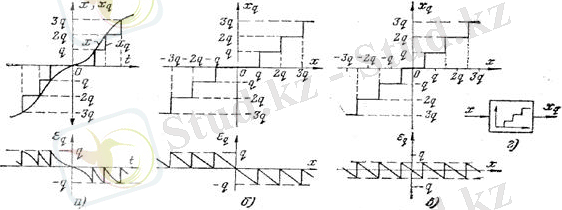
а - деңгей бойынша үздіксіз функцияның дискреттік функцияға өзгертілуі; б, в - квантталудың статискикалық сипаттамалары және оған сәйкес келетін квантталудың қателіктері; г - квантталудың шартты белгіленуі.
1. 3 сурет - Шаманы деңгей бойынша кванттау
Сандық құрылғыларда деңгей бойынша кванттау кең қолданылады. Онда квант аралығы уақытпен анықталатын үздіксіз функция дискреттік функцияға өзгертіледі (1. 3, а суретін қараңыз) . Бұл жағдайда үздіксіз сигнал сандық мәнде көрсетіледі. Оны мына формуламен анықтайды
мұндағы k - k = 1 тең кванттау сипаттамасының тіктілігі (1. 3 суретін қараңыз) ; ent - бұртін бөлігі; n = 0, ±1, ±2, … - кванттау шкаласының арасындағы номер.
Деңгей бойынша кванттау х q шығыс х кіріс сигналдарының арасындағы айырымдарға тең қателіктермен анықталады (1. 3, а cуретіне қараңыз) .

Қателік модулі кванттау сипаттамасының түріне тәуелді және 1. 3,
б
мен 1. 3,
в
суреттерінде көрсетілген сипаттамаларға сәйкес
 q
және
q
және
 q/2
тең. Кванттаудың санды аналогты (АСТ)
түрде шартты белгіленуі 1. 3,
г
суретінде көрсетілген.
q/2
тең. Кванттаудың санды аналогты (АСТ)
түрде шартты белгіленуі 1. 3,
г
суретінде көрсетілген.
Уақыт бойынша квантталу кезінде дискреттелген сигналдардың аналогты сигналдарға түрленуі демодуляция деп, ал қисық торлы функциялардың орнықты қалпына келуі - интерполяция деп аталады. Мұндай түрленулерді демодулятор немесе интерполятор деп аталатын құрылғылармен орындайды. Олар төменгі жиіліктің фильтрлары болып саналады. Олардың шартты белгіленулері 1. 4,
а
суретінде көсетілген. Котельников анықтамасы [6, 7] бойынша дискретизация
 0
жиілігі арқылы орындалады. Егер
х(t)
функциясы 0, 5
Т
с
-дан жоғары жиілікті болмаса,
Т
с
уақыттың тізбекті аралығы үшін уақытпен берілген аймақта
х(t)
үздіксіз функция толық өзінің ординаттарымен анықталады. Осыған байланысты дискретизация жиілігі
0
жиілігі арқылы орындалады. Егер
х(t)
функциясы 0, 5
Т
с
-дан жоғары жиілікті болмаса,
Т
с
уақыттың тізбекті аралығы үшін уақытпен берілген аймақта
х(t)
үздіксіз функция толық өзінің ординаттарымен анықталады. Осыған байланысты дискретизация жиілігі

мұндағы -
 =2
=2
 /
Т
с
=2
f
0
х(t)
функция спекторының ең жоғарғы жиілігі.
/
Т
с
=2
f
0
х(t)
функция спекторының ең жоғарғы жиілігі.
а - төменгі жиілік сүзгісінің шартты белгіленуі - интерполятор; б - санды аналогты түрлендіргіштің шартты белгіленуі; в - қисық торлы функцияларды және оның қателігін қалпына келтіру; г - торлы функция деңгейімен кванттау және оның интерполяторын қалпына келтіру қателігі.
1. 4 сурет - Шамалардың интерполяциясы
Электр жетегін басқару жүйелерінде қарапайым нөлдік қатардың интерполяторы кең қолданылады. Ол толық дискреттеу кезінде дискреттік сигналдың мәнін анықтайды және торлы функцияны тұрақты бөлікке түрлендіреді (1. 4,
в
суретін қараңыз) . Бұл түрлендіру
 =
= х
=
- х
ең жоғарғы деңгейдегі күрделі интерполяторларды қолдану кезінде төмендетілуі мүмкін интерполяция қателігімен орындалады.
=
= х
=
- х
ең жоғарғы деңгейдегі күрделі интерполяторларды қолдану кезінде төмендетілуі мүмкін интерполяция қателігімен орындалады.
Деңгей бойынша сигналдарды кванттау кезінде санды ақпараттың аналогты ақпаратқа түрленуі санды аналогты түрлендіргішпен орындалады (САТ), оның шартты белгіленуі 1. 4, б суретінде көрсетілген. САТ х q санды сигналды x с, а санды аналогты шамаға сызықты сандық аналог түрінде түрлендіреді. Нақты x с, а шамасы аналогты болып саналмайды, ал статистикалық режимде бастапқы тұрақты бөлікті квантталған х q функциясының түрінде болады (1. 3, а суретін қараңыз) .
Санды аналогты құрылғыларда және электр жетегін басқару жүйелерінде х*(t) дискреттік шамалар аналогты түрде көрсетіледі (1. 2, б суретін қараңыз), ал х* q (t) сандық шамалар e =х q - х қателік деңгейінде квантталған торлы функциялар түрінде көрсетіледі (1. 4, г суретін қараңыз) . Бірінші жағдайда құрылғылар импульсті деп, ал екінші жағдайда импульс-кодты деп аталады.
2 дәріс. Жылдамдықты тұрақтандыратын санды аналогты және сандық жүйелер
Дәрістің мазмұны:
- электр жетегінің санды аналогты жүйелермен жылдамдықты тұрақтандыру, оның құрамы, құрылысы және әсер ету принципі;
- электр жетегінің сандық жүйелермен жылдамдықты тұрақтандыру, оның құрамы, құрылысы және әсер ету принципі.
Жұмыстың мақсаттары:
- жылдамдықты тұрақтандырудың сандық және санды аналогты жүйелерінің негізгі принциптерін оқу;
- қарастырылатын жүйелердің анықтамасын, әсер ету принциптерін және негізгі функционалдық элементтерін оқу.
Қозғалтқыш моментін және жылдамдықты санды аналогты жүйемен тұрақтандыру аналогты жүйеге ұқсас реттеуге тәуелді координат құрылысы бойынша орындалады. Олар аналогты және сандық бөліктен тұрады, сондықтан санды аналогты деп аталады. Мұндай жүйелердің аналогты элементтеріне түрлендіргіштер мен қозғалтқыштар жатады. Сондықтан ток датчиктері қозғалтқыш тоғын өлшейді. Жүйедегі ток контуры аналогты түрде орындалады. Электр жетегі жүйесінің сандық бөлігіне жылдамдықты реттеу контуры жатады. Ол датчик пен жылдамдықты реттеу түріндегі жылдамдықтың ақпаратты өлшеу және жылдамдықты берудің сандық құрылғыларынан тұрады.
Жылдамдықты реттеудің дәлдігі төмен жүйелерде жылдамдық контуры аралас және санды аналогты етіп жасалады. Жылдамдықты реттеудің пропорционалды бөлігі аналогты, ал интегралдаушы бөлігі санды болады. Мұндай жүйеде жылдамдықты беру санды түрде болады. Бұл жүйенің функционалдық сұлбасы 2. 1 суретінде көрсетілген. Электр жетегінің жылдамдығын беру SZ тапсырманы енгізу құрылғысының көмегімен N ЖБ сандық түрде енгізіледі. Берілген жылдамдықтың және кернеудің жоғарлауы SJZ күшейткіш санды датчикпен орындалады. UZV санды аналогты түрлендіргішпен (САТ) N’ ЖБ санды сигналды беру U ЖБ жылдамдықты берудің аналогты сигналына түрленеді және жылдамдықты аналогты реттеуге беріледі АR . Басқарылатын А1 жиілікті бөлгіште бір уақытта пайда болған N’ ЖБ сан жоғары тұрақты Gf кварцтық генератормен берілген, f Э эталонды жиілік импульстарымен орындалатын f Б жылдамдықты берудің импульстерін бақылау жиілігін анықтайды.
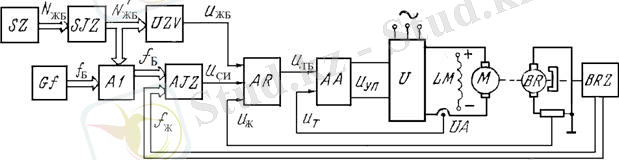
2. 1 сурет - Электр жетегінің жылдамдығын санды аналогты тұрақтандыру жүйесінің функционалдық сұлбасы
f Б жиілігімен берілетін импульстар АJZ (СИ) сандық интеграторға беріледі. Сандық интегратор жылдамдықты реттеудің интегралдаушы бөлігі болып саналады және оған да жылдамдық бойынша кері байланыс арқылы қозғалтқыштың жылдамдығына пропорционалды f Ж жиілікпен, ВRZ жылдамдық импульс датчигімен бақыланатын импульстар беріледі. СИ негізгі үш түйіннен тұрады: уақыт бойынша кері байланыс және берілген импульстардың бөліну түйіні ( ИБТ), реверсивті санағыш РС және САТ (2. 2, а суретін қараңыз) . ИБТ f Б және f Ж жиіліктермен уақыт бойынша импульстерді РС тізбектей беру үшін ( f Ж үзілісі кезінде f Б беруге және керсінше f Б үзілісі кезінде f Ж беруге) таратады. Реверсивті санағыш екі кірістен тұрады: күрделі және есептегіш. Оларға f Б және f Ж импульстары тізбектей беріледі. РС f Б және f Ж импульстардың мөлшерін санайды. Сонымен қатар, егер f Б = f Ж болса, онда қозғалтқыш жылдамдығы берілген мәнге тең, санағыш кірістегі санды өзгертпейді; егер f Ж < f Б (қозғалтқыш жылдамдығы берілген мәннен аз), онда санағыш + f = f Б - f Ж мәнін есептейді, САТ сандық интегратор кірісіндегі U СИ кернеуді жоғарлатады. Ол қозғалтқыш жылдамдығы мен U БТ кернеуінің және жылдамдық реттегішінің интегралды құрайтын келiспеушіліктері болып саналады (2. 1 суретін қараңыз) . Егер f Ж >f Б болса, қозғалтқыш жылдамдығы берілген мәннен жоғары, онда кірістегі U СИ мәнін, U БТ мәнін және қозғалтқыш жылдамдығын төмендету үшін санағыш - f = f Ж - f Б мәнін есептейді. Сонымен санағыш кері байланыс пен импульсті беру арасындағы U СИ интегралды құрайтын, САТ пен СИ аналогты сигналға түрлендіретін, шамасы санағышта жазылған санға пропорционалды f Б және f Ж жиіліктермен ілесетін интегралдауды қамтамассыздандырады. U СИ сигналы U БС -мен АR -ға арифметикалық қалыптасып, қозғалтқыш жылдамдығын жоғарылатады немесе төмендетеді.
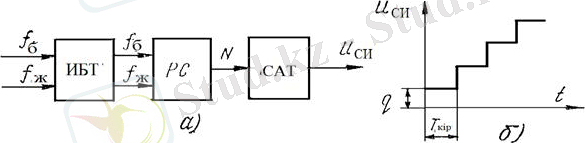
а - функционалды сұлбасы; б - сипаттамасы.
2. 2 сурет - Сандық интегратор
СИ жұмысы f кір кіріс сигнал жиілігінің тұрақты кезіндегі U СИ (t ) өтпелі функциясымен 2. 2, б суретінде көрсетілген. СИ кірісіндегі сигнал q=U СИмах /N дискретімен дискретті түрде жоғарылайды, мұндағы N - Т кір =1/f кір ілесу аралығымен әрбір кіретін импульстің түсуі кезіндегі СИ санағышының санды сыйымдылығы. Кіріс импульстерінің мәні мен жиілігі үлкен болғанда СИ өтпелі функциясы түзу сызықтан жоғары болады.
СИ шығыс кернеуі және оның полярлығы кіріс жиілігінің интеграл айырымдарымен анықталады (берілген және кері байланыспен)

немесе

мұндағы
 - кіріс жиілігінің импульстер тізбектілігінің фаза айырмашылығы.
- кіріс жиілігінің импульстер тізбектілігінің фаза айырмашылығы.
Дискретті түрдегі СИ өтпелі функциясы мына теңдеумен анықталады

Егер
 дәрежелi қатарға жiктеп және жiктеудiң екi бiрiншi мүшелерiмен шектесе, онда
дәрежелi қатарға жiктеп және жiктеудiң екi бiрiншi мүшелерiмен шектесе, онда

Онда

мұндағы Т СИ =Т кір /q - интегратордың тұрақты уақыты.
Жылдамдықты реттеу жүйесінің дәлдігі жылдамдықтың сандық контуры болғанда орындалады. Жүйенің функционалдық сұлбасы 2. 3 суретінде көрсетілген. Электр жетегінің мұндай жүйесінде жылдамдықты беру қозғалтқыш жылдамдығына сәйкес N’ ЖБ (nT 0 ) жылдамдықты беру сигналының қажетті деңгейге дейін өсуін қамтамасыз ететін SJZ датчик қарқындылығын қолдана отырып, секірме және уақыт функциясы түрінде орындалады.
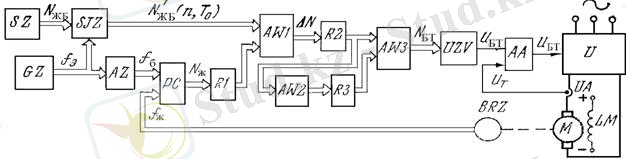
2. 3 сурет - Электр жетегінің жылдамдығын тұрақтандырудың санды жүйесінің функционалдық сұлбасы
Жылдамдық бойынша кері байланыс сигналы ВRZ жылдамдық импульсті датчигімен орындалады. Жылдамдық датчигінің импульсі санды жүйенің f 0 дискреттік жиілігімен (Т 0 =1/f 0 ) анықталатын, бекiтiлген дискреттi Т 0 уақыт аралығында санағышпен есептелінеді. Дискреттеу жиілігі АZ жиілік бөлгіш арқылы жоғары тұрақтылықты кварцтық генератордың Gf эталонды жиілігімен беріледі (f 0 =f Э /k д ) . t = пТ 0 уақыт аралығындағы электр қозғалтқышының ағымдағы жылдамдығы есептелген импульстар санына пропорционалды
мұндағы m - уақыт аралығындағы жылдамдық датчигінің импульстер саны [(п-1) Т 0 - пТ 0 ] ; z - біліктің бір айналымы кезіндегі импульстер саны.
РС санағышының шығысында уақыт аралығының өтуі кезінде жылдамдық бойынша кері байланыстың санды сигналы тәрізді N c [пТ 0 ] сан пайда болады. Бұл сан R1 регистрда келесі [пТ 0 - (n +1) Т 0 ] аралық басталғанша сақталады және N ЖБ жылдамдық беру санымен АW1 қосындылауда салыстырылады. АW1 шығысында санды басқару сигнал түріндегі айырмашылық пайда болады

Ол R2 регистрінде сақталып, UZV САТ беріледі. Егер жүйеде алгоритм бойынша жұмыс жасайтын жылдамдықты пропорционалды реттеу қолданса, онда

мұндағы k 1 - көлемдік коэффициент.
Егер алгоритм бойынша жұмыс жасайтын жылдамдықтың ПИ реттегіші қолданса

онда санды бөлікте қосымша
AW2
сумматор және
R3
регистр қолданылады.
Нәтижелері
R3
регистрде сақталып және
AW2
қосындылауда жинақталған
 [пТ
0
]
жылдамдықтың ауытқыған ағымдағы мәндерінің тізбектей алгебралық қосындысы интегралды құрады.
[пТ
0
]
жылдамдықтың ауытқыған ағымдағы мәндерінің тізбектей алгебралық қосындысы интегралды құрады.
Жылдамдықты санды реттеу және басқа санды құрылғылар өндірісте шығарылатын стандарттық блокпен орындалады [6] . Егер электр жетегін басқару сәйкес келетін бағдарлама арқылы ЭЕМ орындалса, онда бұл құрылғылардың құрылуы оңай болады.
Соңғы уақытта импульсті фазалық басқару жүйесін (ИФБЖ) қолданбай, ЭЕМ арқылы тиристорлы түрлендіргішпен жылдамдықты реттеу жүйесі өңделуде, ол тура басқару деп аталады. Мұндай жүйеде жүйенің аналогты бөлігі ретінде түзеткіш - қозғалтқыш күштік бөлігі, ал ток және жылдамдық контурлары санды бөлігі болып саналады. Қажетті уақыт аралығында басқару импульстерін түзеткіш тиристорларына беріп және ИФБЖ функцияларын орындайтын «Тура» басқару ЭЕМ орындалады. Жылдамдықты және токты санды реттеу бағдарламалық әдіспен ЭЕМ орындалады.
3 дәріс. Электр жетегінің жағдайын аналогты және санды аналогты жүйелермен басқару
Дәрістің мазмұны:
- жағдайды аналогты басқару жүйелерінің функционалды және принципиалды сұлбалары, құрылысы және әсер ету принципі;
- жағдайды санды аналогты басқару жүйелерінің функционалды және принципиалды сұлбалары, құрылысы және әсер ету принципі.
Жұмыстың мақсаттары:
- электр жетегі жағдайымен аналогты және санды басқару жүйелерінің негізгі принциптерін игеру;
- қарастырылатын жүйелердің анықтамасын және әсер ету принципін, оның негізгі функционалдық элементтерін оқу.
Механизмдерді автоматтандыру кезінде негізгі жұмыс қозғалысы орындаушы органның сызықты немесе бұрышты орналасуы болып саналады. Оны қажетті жағдайда тоқтату үшін жағдайды басқару жүйесімен электр жетегі кең қолданылады. Жағдайды автоматты басқарудың екі түрі болады:
a) жолдық датчиктердiң дискреттік сигналдарымен, жолдың берілген нүктелерінде электр жетегінің дискретті орындалуы;
b) берілген бағдарламамен немесе мөлшерленген орын ауыстыруды орындау үшін ауытқу бойынша жағдайды үздіксіз автоматты басқару.
Басқару әдісіне тәуелсіз электр жетегі дискретті немесе үздіксіз жағдайды беруді, берілген жағдайда жылдамдықтың орын ауыстыруына тәуелді жұмыс машинасының өнімділігі мен орындау органының дәл тоқтатуын талап етуімен анықталатын жағдайдың орын ауыстыруын бақылауды, берілген жағдайда дәл тоқтатуды қамтамасыз етеді.
Дискретті орналастыру кезінде орындау органының анықталған шекті жағдайы беріледі. Бұл жағдайды бақылау түйiскен және түйіспесіз немесе іске қосылу қателігі 1- 0, 01 мм жол ажыратқыштармен дискретті датчик жағдайымен орындалады. Бұл жағдайда механикалық тоқтатуды қолданып, берілген жағдайда электр жетегін тоқтатуды қамтамасыз ететін электр жетегін басқарудың ажыратылған жүйесі қолданылады. Мұндай басқару түрі орын ауыстыруларды сирек қайта өңдеушi циклімен дәлдігі жоғары емес орналастыру кезінде қолданылады.
... жалғасыСіз бұл жұмысты біздің қосымшамыз арқылы толығымен тегін көре аласыз.
- Іс жүргізу
- Автоматтандыру, Техника
- Алғашқы әскери дайындық
- Астрономия
- Ауыл шаруашылығы
- Банк ісі
- Бизнесті бағалау
- Биология
- Бухгалтерлік іс
- Валеология
- Ветеринария
- География
- Геология, Геофизика, Геодезия
- Дін
- Ет, сүт, шарап өнімдері
- Жалпы тарих
- Жер кадастрі, Жылжымайтын мүлік
- Журналистика
- Информатика
- Кеден ісі
- Маркетинг
- Математика, Геометрия
- Медицина
- Мемлекеттік басқару
- Менеджмент
- Мұнай, Газ
- Мұрағат ісі
- Мәдениеттану
- ОБЖ (Основы безопасности жизнедеятельности)
- Педагогика
- Полиграфия
- Психология
- Салық
- Саясаттану
- Сақтандыру
- Сертификаттау, стандарттау
- Социология, Демография
- Спорт
- Статистика
- Тілтану, Филология
- Тарихи тұлғалар
- Тау-кен ісі
- Транспорт
- Туризм
- Физика
- Философия
- Халықаралық қатынастар
- Химия
- Экология, Қоршаған ортаны қорғау
- Экономика
- Экономикалық география
- Электротехника
- Қазақстан тарихы
- Қаржы
- Құрылыс
- Құқық, Криминалистика
- Әдебиет
- Өнер, музыка
- Өнеркәсіп, Өндіріс
Қазақ тілінде жазылған рефераттар, курстық жұмыстар, дипломдық жұмыстар бойынша біздің қор #1 болып табылады.

Ақпарат
Қосымша
Email: info@stud.kz