Зертханалық жұмыс: COBRA-3 құрылғысы арқылы инерция моменті мен бұрыштық үдеуді анықтау

ҚАЗАҚСТАН РЕСПУБЛИКАСЫНЫҢ БІЛІМ ЖӘНЕ ҒЫЛЫМ МИНИСТРЛІГІ
Қ. И. Сәтбаев атындағы Қазақ Ұлттық техникалық университеті

әл-Машани атындағы Жаратылыстану - гуманитарлық институты
Жалпы және теориялық физика кафедрасы
Мухамедгалиева М. А., Байгисова К. Б.
№2 Зертханалық жұмыс

«ИНЕРЦИЯ МОМЕНТІ МЕН БҰРЫШТЫҚ ҮДЕУДІ COBRA-3 ҚҰРЫЛҒЫСЫ АРҚЫЛЫ АНЫҚТАУ»
Алматы 2009
№2 ЗЕРТХАНАЛЫҚ ЖҰМЫС
ИНЕРЦИЯ МОМЕНТІ МЕН БҰРЫШТЫҚ ҮДЕУДІ COBRA-3 ҚҰРЫЛҒЫСЫ АРҚЫЛЫ АНЫҚТАУ
Жұмыстың мақсаты: айналмалы қозғалыс динамикасымен танысу:
- бірқалыпты айналмалы қозғалыс кезіндегі айналу бұрышы мен бұрыштық жылдамдықты өлшеу;
- бірқалыпты үдемелі айналмалы қозғалыс кезіндегі айналу бұрышы мен бұрыштық жылдамдықты өлшеу;
- дененің айналу кезіндегі айналу бұрышының тәуелділігін анықтау;
- күш моментін анықтау;
- инерция моментін анықтау.
1 Теориялық кіріспе
Қозғалмайтын координата жүйесіне қатысты қатты дененің басы масса центрі мен оған әсер етуші күш моментіне
 (1-суретті қара) сәйкес келетін импульс моменті
(1-суретті қара) сәйкес келетін импульс моменті
 келесі формуламен анықталады:
келесі формуламен анықталады:
(1)
Импульс моменті бұрыштық жылдамдық
 пен инерция моментінің тензоры
пен инерция моментінің тензоры
 арқылы өрнектеледі:
арқылы өрнектеледі:

Берілген жағдайда
 инерция моменті осінің (Z осі) бағытына ие, сондықтан
инерция моменті осінің (Z осі) бағытына ие, сондықтан
 бір ғана компонентадан тұрады
бір ғана компонентадан тұрады
 ,
,
мұндағы I z - дененің инерция моментінің Z -құраушысы. Онда (1) теңдеу өзгереді:
Анықтамаға сәйкес күш моменті
 келесі формуламен өрнектеледі (1-сурет) :
келесі формуламен өрнектеледі (1-сурет) :
 .
.
берілген жағдайда
 және
және
 .
.
Онда қозғалыс теңеуі:
 ,
,
бұдан
 .
.
Қатты дененің тығыздығы
ρ(x, y, z)
мен инерция моменті
 мына түрге ие:
мына түрге ие:

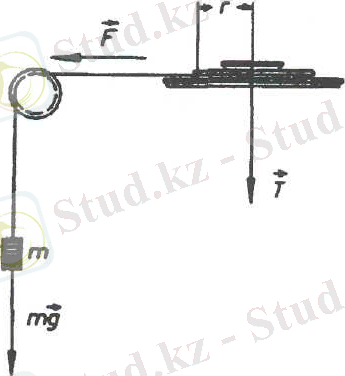
1- сурет - қозғалмалы тақтаға әсер етуші ауырлық күшінің моменті
2. Тәжірибелік қондырғы
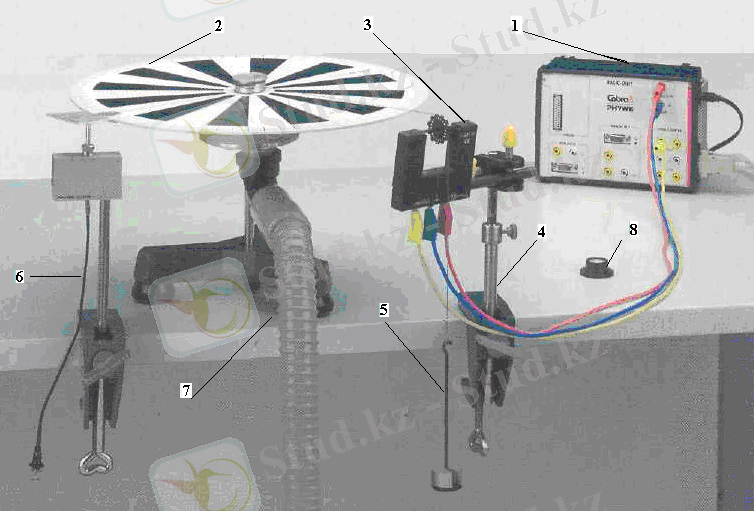 Тәжірибелік қондырғының сыртқы түрі 2 - суретте және Cobra-3 құрылғысымен бірге берілген жинақталған фотоэлементтің электрлік сұлбасы 3 - суретте келтірілген
Тәжірибелік қондырғының сыртқы түрі 2 - суретте және Cobra-3 құрылғысымен бірге берілген жинақталған фотоэлементтің электрлік сұлбасы 3 - суретте келтірілген
2 - сурет - Жинақталған фотоэлементті тәжірибелік қондырғы:
- ток көзі 12В-ке тең Cobra-3 - негізгі элементі
- бұрыштық шкаласы бар айналмалы үстел
- жинақталған фотоэлемент
- жинақталған фотоэлемент орнатылған штатив
- жеңіл жүкше ілінген ұстағыш (тұтқыш)
- стопорлық құрылғы
- сорғы
- деңгей
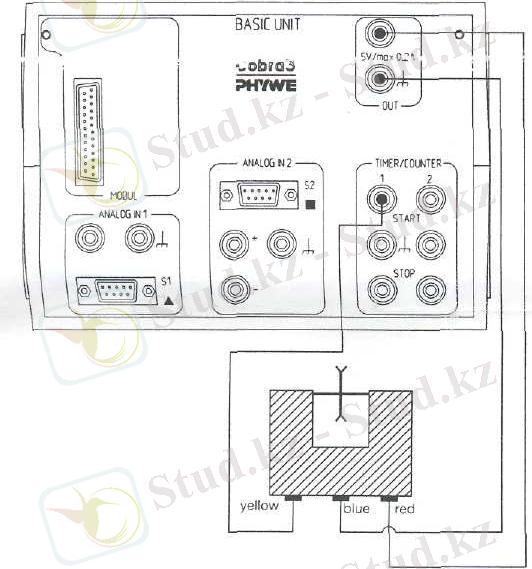
3 - сурет - Жинақталған фотоэлементті Cobra-3 - негізгі элементіне қосу
3. Тәжірибені жүргізу реті мен өлшеу нәтижелерін өңдеу
1- Жаттығу . Тәжірибелік қондырғының жұмысқа дайындығы.
1. Жинақталған фотоэлементті Cobra-3 - негізгі элементіне 3 - суретке сәйкес қосыңыз
2. Айналу осі мен фотоэлемент дискін қосатын жіп горизонталь күйде орналасқан
3. Жіпті шамамен подшипниктің айналмалы осін айналдыра отырып 15 рет ораңыз.
4. Негізгі бағананы (штатив) айналмалы үстел горизанталь жағдайда болатындай етіп келтіріңіз.
5. Ауаның келуін ротор тек ауа қысымының өзгеруіне қатысты көтерілетіндей етіп және оның ауа қабатында вибрацияға ұшырамайтындай етіп келтіріңіз.
6. Өлшенетің параметрлерді 3 - суретке сәйкес беріңіз.
7. Жібек жіпті дискіге орналастырып, қондырғыны массасы 10г. жүкше еркін ілініп тұратындай етіп қойыңыз.
8. Тақтаны тыныштық күйге келтіріп қойыңыз.
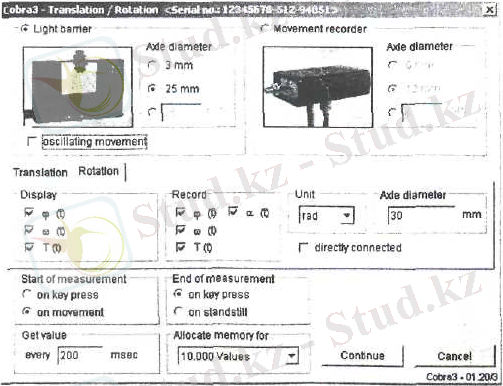
4 - сурет - Өлшенетін параметрлер
9. Жібек жіп оралған айналмалы үстел валының диаметрін (30 мм) белгілеңіз. «Axle diameter» (вал диаметрінде) диалогты қорап жинақталған фотоэлементтің әртүрлі айналу жылдамдықтары мен үстелдің айналу бұрышы синхронды болатындай етіп орнатылған.
10. Жібек жіптің ұшына массасы 10г. жүкшені іліңіз және тәжірибе барысында ол әртүрлі жүкшелермен толықтырып отырылады.
11. Вентиляторды қосып, кабельді іске қосыңыз. Айналмалы үстел тыныштық күйде болуы тиіс. Айналмалы үстел қозғала бастағанда «Start measurement» (өлшемді бастау) тетігін басыңыз. Жүкше жерге тиген кезде «Stop measurement» (өлшемді аяқтау) тетігін басыңыз. Тәжірибе барысында жүкше тербелмей, тыныштық күйде болуы тиіс.
Жұмыс РС, WINDOWS ® 95 және одан кейінгі версияларда орындалады.
Ескерту: Егер айналмалы үстел бірқалыпсыз қозғалса, оның қозғалысы өзгеретінін немесе өзгермейтінін байқау үшін үстелді қарама-қарсы бағытта айналдырыңыз. Қажет болса ауа көзін өзгертіңіз.
2- Жаттығу . Өлшемдер нәтижелерін есептеу.
1. «Autoscale» (автошкала) тетігін басқаннан кейін өлшем нәтижелері экранда толық беріледі (5 - суретті қара) . Өлшеу барысында өлшенген нүктелерге қосымша болып (жылдамдықтың уақытқа тәуелді қисығының өсетін бөлігі) қозғалыс фазасы аяқталғанда кейбір кездейсоқ нүктелер пайда болады. Бұл нүктелер үдемелі дене мен еденнің жанасуынан туады. Есептеу кезінде бұл нүктелерді ескермейміз.
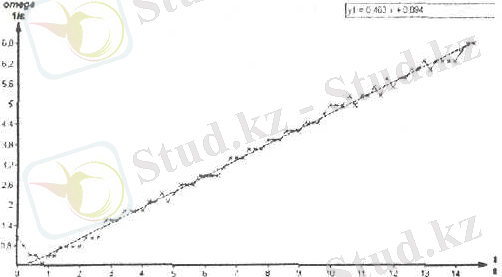
5 - сурет - Бұрыштық жылдамдықтың үдемелі айналмалы қозғалыс уақытына тәуелділігі мен регрессиялық (өшетін) сызықтар
2. <омега (t) > - бұрыштық жылдамдық - уақыт тәуелділігінің графигі түзу сызықты болады және ω=α·t қатынасына (5 - сурет) сәйкес. Бұрыштық үдеу ώ=α уақыт функциясы болып табылады. Егер регрессия тетігін басатын болсақ, өлшенген нүктелер арқылы регрессиялық түзу алынады. m қисығы а бұрыштық үдеуін көрсетеді, мысалы 5 - суретте α=0. 463рад/с 2 . Жүктің салмағы жеңіл болып дөңгелек ақырын қозғалып, әрі жылдамдық аз болған жағдайда үлкен қателіктер пайда болатынын ескеру қажет.
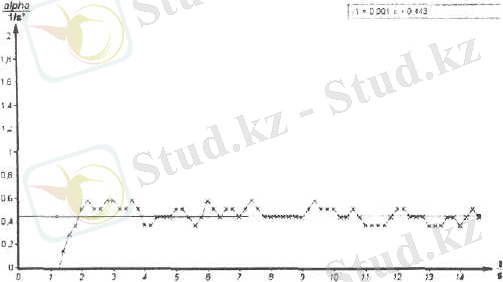
6 - сурет - αt диаграммасындағы регрессиялық (өшетін) сызықтар
3. 6 - суретте бұрыштық үдеудің уақытқа тәуелділігі көрсетілген. Мұнда регрессиялық (өшетін) сызық та келтірілген. у осінің b=0. 443 рад/с 2 сегменті а бұрыштық үдеуінің ішкі мәнін көрсетеді. Бірқалыпты үдемелі айналмалы қозғалыс үшін бұрыштық үдеу уақыт функциясы ретінде константа болады.
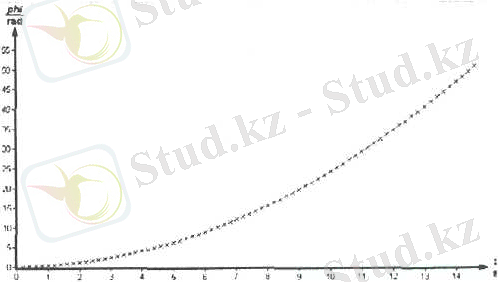
7 - сурет -Жеке өлшенетін нүктелерден тұратын айналу бұрышының уақытқа тәуелділік диаграммасы
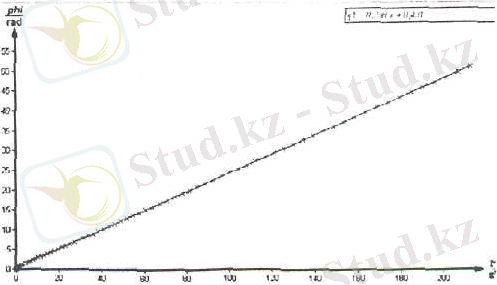
8 - сурет - Бұрыш / уақыт 2 диаграммасы
4. 7 - суретте парабола түріндегі нақты өлшенген нүктелерден құралған жолдың уақытқа тәуелділік қисық сызығы берілген. Жолдың уақытқа тәуелділігінің параболалық жолын келесі түрде дәлелдеуге болады (8 - сурет)
5. Сызықтық қисық алу үшін ось бойында квадратты уақыт берілуі тиіс. «Measurement/Channel manager» (Өлшеу/Каналды басқару) қолдана отырып, уақытты х және у остерінде белгілейміз. Бұл математикалық есептеулер үшін қажет.
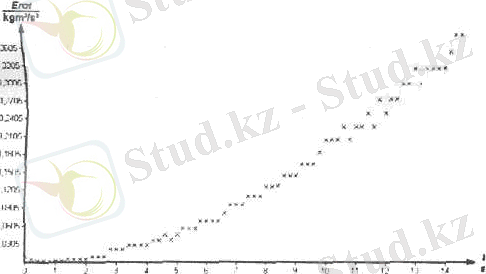
9 - сурет - Үдемелі айналмалы қозғалыстың айналу энергиясы
6. «Analysis/Channel modification» (Анализ/Каналдық модификация) каналын қолдана отырып, у осінде х:=х*х операциясы берілген. Бұл жаңа канал «Export мeasurement/Measuring channel» (Экспортты өлшеу/Өлшеуші канал) бастапқы өлшемді береді. «Measurement/Channel manager» (Өлшеу/ Каналды басқару) каналын қолдана отырып, х осінде жаңа квадратты уақыт, ал у осінде j бұрышы алынады. 8 - суретте регрессиялық сызық қисық сызықтың енді сызықтыға түрленгенін дәлелдейді және осыған сәйкес ол жолдың уақытқа қатысты бастапқы квадратты тәуелділігі болып табылады.
7. Айналмалы үстел қозғалыстағы массаға қатысты вертикаль бағытта үдемелі қозғалады. Осыған қатысты эффективті күш моменті келесі формуламен есептелінеді:
 ,
,
мұндағы r - қолданып отырған вал немесе қозғалыстағы дөңгелек радиусы , m - үдеу алған дене массасы, g=9. 81 м/с 2 - еркін түсу үдеуі.
8. Импульс моменті Мt, инерция моменті J және бұрыштық жылдамдық ω арасындағы қатынас өрнегі мына түрде берілген:
 .
.
Сондықтан инерция моменті J келесі түрде өрнектеледі:
 .
.
- ω(t) тәуелділігінің графигінде (5 - сурет) ω(t) қатынасы қисық регрессиялық сызықпен анықталады.
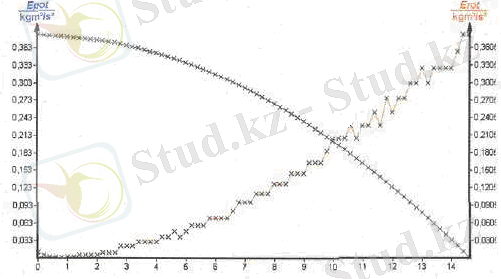
10 - сурет - Потенциалдық энергия мен қосымша айналу энергиясы
10. J мәнін есептеу үшін үдемелі дененің массасы m мен жіп оралған айналмалы осьтің r (1. 5 cм) радиусын қарастыру керек.
11. Үлгі ретінде инерция моментін анықтайық:
m (қисық) =0. 463 рад/с 2 =ω/t
М=r·m·g=0. 015м·0. 051кг·9. 81м/с 2 =0. 0075 кг·м 2 /с 2

12.
J
момент инерциясын келесі түрде де анықтауға болады. Күш моментінің динамикалық сипаты бұрыштық үдеу болып табылады.
М
күш моменті
 бұрыштық үдеуге пропорционал
бұрыштық үдеуге пропорционал
 ,
,
сондықтан
 .
.
13. 6 - суреттен регрессиялық сызықтың у осі сегментінен а бұрыштық үдеуін табамыз.
14. Айналу энергиясы (9 - сурет) келесі формуламен анықталады:
Е айн (t) =0. 5 J ω 2 ,
Бұдан J=0. 0165 кг/м 2 .
15. «Analysis/Channel modification/Operation» (Анализ/Каналдық Модификация/Операция) түрлендіргішін қолдану келесі нәтижелерді береді
х=0. 5×0. 0165×х×х,
мұндағы х=ω(t ) .
16. Потенциалдық энергия (10 - сурет) келесі формуламен анықталады:
Е пот (t) =mgh
мұндағы h (s(t), h=0. 77м) және s(t) = φ(t) ·r тәуелділіктері арқылы берілген.
17. «Analysis/Channel modification/Operation» (Анализ/Каналдық модификация /Операция) түрлендіргішін қолдану келесі нәтижелерді береді
х= 0. 051×9. 81× (0. 77-х×0. 015),
мұндағы х=φ(t) .
... жалғасыСіз бұл жұмысты біздің қосымшамыз арқылы толығымен тегін көре аласыз.
- Іс жүргізу
- Автоматтандыру, Техника
- Алғашқы әскери дайындық
- Астрономия
- Ауыл шаруашылығы
- Банк ісі
- Бизнесті бағалау
- Биология
- Бухгалтерлік іс
- Валеология
- Ветеринария
- География
- Геология, Геофизика, Геодезия
- Дін
- Ет, сүт, шарап өнімдері
- Жалпы тарих
- Жер кадастрі, Жылжымайтын мүлік
- Журналистика
- Информатика
- Кеден ісі
- Маркетинг
- Математика, Геометрия
- Медицина
- Мемлекеттік басқару
- Менеджмент
- Мұнай, Газ
- Мұрағат ісі
- Мәдениеттану
- ОБЖ (Основы безопасности жизнедеятельности)
- Педагогика
- Полиграфия
- Психология
- Салық
- Саясаттану
- Сақтандыру
- Сертификаттау, стандарттау
- Социология, Демография
- Спорт
- Статистика
- Тілтану, Филология
- Тарихи тұлғалар
- Тау-кен ісі
- Транспорт
- Туризм
- Физика
- Философия
- Халықаралық қатынастар
- Химия
- Экология, Қоршаған ортаны қорғау
- Экономика
- Экономикалық география
- Электротехника
- Қазақстан тарихы
- Қаржы
- Құрылыс
- Құқық, Криминалистика
- Әдебиет
- Өнер, музыка
- Өнеркәсіп, Өндіріс
Қазақ тілінде жазылған рефераттар, курстық жұмыстар, дипломдық жұмыстар бойынша біздің қор #1 болып табылады.

Ақпарат
Қосымша
Email: info@stud.kz