Типтік буындар мен сызықтық реттегіштердің модельдеуі және динамикасын зерттеу

Ғ. Даукеев атындағы «АЛМАТЫ ЭНЕРГЕТИКА ЖӘНЕ БАЙЛАНЫС УНИВЕРСИТЕТІ»
КОММЕРЦИЯЛЫҚ ЕМЕС АКЦИОНЕРЛІК ҚОҒАМ
ӨНЕРКӘСІПТІК ЖЫЛУЭНЕРГЕТИКА КАФЕДРАСЫ
№1 ЕСЕПТЕУ-ГРАФИКАЛЫҚ ЖҰМЫСЫ
Пән: «Жылутехнологиясындағы жылутехнологиялық процестерді АБТ және АБЖ»
Тақырыбы: Типтік буындар мен сызықтық реттегіштерді модельдеу және динамикасын зерттеу.
Мамандық : 5В071700 -Жылуэнергетика
Топ : ПТЭк-17-1
Сынақ кітапшасы: № 171175
Орындаған : Арман Айнур
Қабылдаған: доц. Джаманкулова Н. О.
« » 2020ж.
Бағасы қолы
Алматы, 2020
Мазмұны
Кіріспе . . . …… . . . …3
Сұрақ 2. 2. 4 . . . … . . . …4
Сұрақ 2. 2. 10 . . . … . . . …8
Сұрақ 2. 2. 23 . . . …. . … . . . 10
Есеп №1 . . . … . . . 12
Қорытынды . . . …… . . . . . . … . . . 15
Әдебиеттер тізімі . . . …… . . . . . . … . . . 16
Кіріспе
Кез-келген өндірісте технологиялық процестер белгілі бір мәнде шекте-тілетін физикалық шамалармен сипатталады. Жабдықтардың жұмысы кезін-де ол шамалар белгілі бір деңгейде тұрақтануы, не берілген программа бойынша өзгеріп отыруы тиіс. Кез-келген қондырғыда технологиялық процесстің бірқалыпты жүруі белгілі бір ереженің, қызмет алгоритмінің орындалуына байланысты болады. Осы қызмет алгоритмін орындау үшін белгілі бір сыртқы команданы орындайтын қондырғыны, не машинаны басқару обьектісі дейді. Технологиялық процесті жүргізу үшін басқару обьек-тісіне әсер ететін тиімді ықпалды басқару дейді. Егер бұл басқару адамның қатысуынсыз жүзеге асса, оны автоматты, ал адамның қатысуымен болса қолмен басқару деп атайды. Әр обьектіде физикалық шаманың берілген мәнін тұрақтандырып немесе оны белгілі бағытта өзгертіп отыратын басқарғыш құрылғысы болады. Басқару обьектісіне басқару алгоритміне сәйкес өзара әрекеттесе жұмыс жасайтын автоматты басқару құрылғысы мен басқару обьектісінің жиынтығы автоматты басқару жүйесі (АБЖ) деп аталады. Жұмыс барысында автоматты басқару жүйесіне әртүрлі ішкі және сыртқы әсерлер ықпал жасайды. Технологиялық жабдықтардың қай-қайсы-сы болмасын тұрақты (тағайындалған) режимде жұмыс істеуі керек. Бірақ нақты пайдалану жағдайында әртүрлі қоздырушы әсерлерге байланысты бұл режим ұдайы бұзылатындықтан, технологиялық процестің параметрлері өзгереді. Сол себепті өндірістік жабдықтарды (басқару обьектісін ) басқарып отыру қажет, яғни басқарылатын шама қоздырушы әсердің ықпалына қарамастан берілген ереже (программа) бойынша өзгеретіндей дәл есеппен басқарушы әсерді қалыптастыру керек.
2. 2. 4 Адаптивті және экстремальді жүйелерді сипаттау. Оларды жылуэнергетикалық процестерді басқару үшін қолдану мысалдарын келтіру.
Басқарудың бейімді (бейімделген) жүйелерінде қажеттілік сыртқы ауытқулар болған кезде басқару объектілерінде өтетін процестерді егжей-тегжейлі зерделеу мен сипаттаудың практикалық мүмкіндігі болмаған кезде басқару міндеттерінің күрделенуіне байланысты туындайды. Бейімделу әсеріне басқару объектісіндегі процестерді алу, өңдеу және талдау бойынша функциялардың бір бөлігі жүйені пайдалану процесінде орындалады. Функциялардың мұндай бөлінуі басқару сигналдарын қалыптастыру кезінде өтетін процестер туралы ақпаратты неғұрлым толық пайдалануға ықпал етеді және белгісіздіктің басқару сапасына әсерін айтарлықтай төмендетуге мүмкіндік береді. Осылайша, адаптивті басқару жүйенің жұмысы туралы априорлық ақпараттың белгісіздік немесе "толық емес" әсері басқару процестерінің берілген сапасын қамтамасыз ету үшін маңызды болған жағдайларда қажет. Қазіргі уақытта бейімделу жүйелерінің келесі жіктемесі бар: өздігінен бапталатын жүйелер, ерекше фазалық жағдайларда бейімделуі бар жүйелер және жүйенің өздігінен білім алушылары.
Автоматты басқарудың өздігінен құрылатын (экстремалды) жүйелерінің класы қарапайым техникалық іске асыруды білдіреді. Бұл жүйе класы басқару объектілерінің немесе технологиялық процестердің бірқатар объектілеріне басқарушы әсерлерден жұмыс параметрінің экстремалды тәуелділігіне (минимум немесе максимум) байланысты. Оларға тұрақты токтың қуатты электр қозғалтқыштары, химия өнеркәсібіндегі технологиялық процестер, оттықтардың әртүрлі түрлері, ұшақтардың реактивті қозғалтқыштары және т. б. жатады. Ауа жеткіліксіз берілгенде оттықтағы отын толық жанбайды және бөлінетін жылу мөлшері азаяды. Ауаны артық беру кезінде жылудың бір бөлігі ауамен бірге шығарылады. Тек ауа мен жылу мөлшері арасындағы белгілі бір ара қатынаста оттықтағы ең жоғары температураға қол жеткізіледі. Ұшақтың турбореактивті қозғалтқышында отын шығынының өзгеруімен компрессордағы ауаның ең жоғары қысымын, демек, қозғалтқыштың ең жоғары тартымын алуға қол жеткізуге болады. Отын шығыны аз және көп болған кезде компрессор мен тарту ауа қысымы төмендейді. Сонымен қатар, басқару объектілерінің экстремалды нүктелері уақыт пен кеңістікте "қалқымалы" болып табылады.
Жылу энергетикасында автоматты реттеу жүйелері қолданылады. үздіксіз технологиялық процестерді және параметірлерді тұрақтандыру үшін.
Мысалы, температура, қысым, деңгей, шығын, концентрация сияқты процестер. Мұндай жүйелердің мақсаты кездейсоқ наразылықтарды басқару процессінің зиянды әсерін жою болып табылады.
Жалпы алғанда, біз экстремум бар деп айта аламыз, ал басқарушы әсердің қандай мәндерінде ол-априори белгісіз. Бұл жағдайда автоматты басқару жүйесі пайдалану процесінде объектіні экстремалды жағдайға әкелетін басқару әсерін қалыптастырып, оны ашулану және экстремалды нүктелердің "қалқымалы" сипатында осы күйде ұстап тұруы тиіс. Басқару құрылғысы төтенше реттеуші болып табылады.
Объектінің қатты жай-күйі туралы ақпаратты алу тәсілі бойынша экстремалды жүйелер іздеусіз және іздеу болып табылады. Жұмыс параметрінің қажетті мәні мен реттеуіш параметрлері арасындағы аналитикалық тәуелділікті пайдалану нәтижесінде іздеусіз жүйелерде ең жақсы басқару анықталады. Баяу әсер ететін іздеу жүйелерінде экстремумның болуы әртүрлі тәсілдермен орындалуы мүмкін. Dy/du туындысын бағалауға түсетін синхронды детектеу әдісі ең көп таралған, мұнда y - басқару объектісінің реттелетін (жұмыс) параметрі, u - басқару әсері. Синхронды детектеудің әдісін суреттейтін құрылымдық схема сурет. 6. 1.
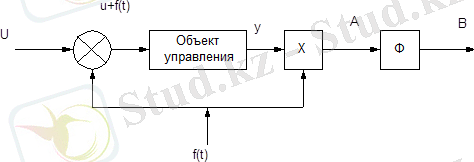
Синхронды детектеудің құрылымы
Y(u) экстремалды тәуелділікке ие басқару объектісінің кіруіне u басқарушы әсермен бірге тұрақты мерзімді сигнал F(t) = gsinwt түрінде елеусіз наразылық беріледі, мұнда g нөлден көп және жеткілікті аз. Басқару объектісінің шығуында y = y(u + gsinwt) аламыз. Алынған y мәні F(t) сигналына көбейтіледі. Нәтижесінде А сигналы мәнді қабылдайды.
А =yf(t) = y(u+gsinwt) gsinwt.
Y(u) тәуелділігі жеткілікті тегіс функция болып табылады деп болжай отырып, оны далалы қатарға бөлуге болады және жеткілікті дәлдікпен ыдыраудың бірінші мүшелерімен шектеледі
Y(u+gsinwt) =y(u) +gsinwt(dy/du) + 0. 5g 2 sin 2 wt(d 2 y/du 2 ) + … . . .
Өйткені g мәні аз, онда жоғары тәртіптегі мүшелерді елемеуге болады және нәтижесінде
Y(u + gsinwt) » y(u) + gsinwt(dy/du) .
Содан кейін сигналдың ауысуы нәтижесінде мәнді қабылдайды
А = y(u) sinwt + g 2 sin 2 wt(dy/du) .
Төмен жиілік сүзгішінің шығуында ф сигналды аламыз.
.
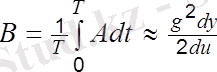
Егер сүзгі уақыты жеткілікті үлкен болса, онда біз

.
Демек, сүзгі шығысындағы сигнал Dy/du туындысына пропорционал
Синхронды детектеуді техникалық іске асыру экстремалды басқару мақсаттары үшін кері белгісі бар dy/du туындысы туралы ақпарат болған кезде экстремумға қозғалысты ұйымдастыруға түседі, яғни
du/dt = -dy/du
Интегралдан кейін Басқару әсерін аламыз
.
Оның негізінде, экстремалды басқару жүйесінің құрылымын күріш түрінде жүзеге асыруға болады. 6. 2.
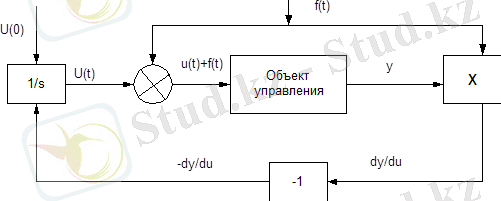
Экстремалды басқару жүйесінің құрылымы
Жоғарыда қарастырылған синхронды детектеу экстремумді іздеу әдісі ретінде гармоникалық синусоидальды ұйытқыштармен, үздіксіз сипаттамалары бар объектілер үшін экстремалды басқарудың өте сенімді және тиімді құралы болып табылады.
U(0) сигналы интегралдаудың бастапқы шарттарын анықтайды, яғни экстремумды іздеудің бастапқы нүктесі болып табылады.
2. 2. 10 АРЖ элементтерінің дифференциал теңдеулерін жазудың өлшемсіз және операторлық түрлері. Дифференциал теңдеулерді сызықтандырудың мақсаты мен әдістері. АРЖ-ні Лаплас түрлендірулерінің көмегімен зерттеу әдісін түсіндіру. Дифференциал теңдеулерді жазудың өлшемді түрінен өлшемсіз және операторлық түріне өту мысалын келтіру.
Дифференциал теңдеуі бейсызықты болуы ықтимал, өйткені
 не
не
 коэффициенттерінің біразы
коэффициенттерінің біразы
 -қа не
-қа не
 -ға тәуелді болуы мүмкін, сол себепті бұл теңдеуді пайдалану белгілі бір тиімсіздікті тудырады
-ға тәуелді болуы мүмкін, сол себепті бұл теңдеуді пайдалану белгілі бір тиімсіздікті тудырады
Осыған орай, бейсызықты тәуелділіктерді Тейлор мен Маклорен қатарларының көмегімен жіктеу арқылы сызықтандырады, әрі өлшемсіз координаттар ендіріледі.
Бейсызықтықты сызықтыққа келтіріп және х өлшемсіз координаттарын енгізіп, теңдеуін мына түрде жазалық:

мұндағы
 және
және
 - тұрақты коэффициенттер.
- тұрақты коэффициенттер.
Беріліс функциясының негізгі ұғымы Лаплас түрлендіруі болып табылады, оның мәні уақыт функциясынан (t)
кешенді айнымалы функциясына х (р),
мұнда Р = α + ί ω
Нөлдік бастапқы шарттар:
х
к
(t) = 0 ;
 t=0 =0
t=0 =0
х
ш
(t) = 0 ;
 t=0 =0
t=0 =0
Нөлдік бастапқы жағдайда ДУ бейнесі оның операторлық жазба формасына сәйкес келеді,
Бұл жағдайда жазуға болады
 немесе
немесе
 .
.
х
шыг
= х
шыг
(р) ;
х
кip
= х
кip
(р)
 →
р
n
→
р
n
Егер теңдеуін бастапқы нөлдік шартты ескере отырып Лаплас бойынша түрлендірсек, онда ол мына түрге келеді:
 (1)
(1)
не қысқарған түрде:
 (2)
(2)
мұндағы


(2) теңдеуінің екі шешімі болады:
1. Теңдеудің оң бөлігінсіз жалпы шешімі - жүйенің еркін тербелісі;
2. Толық теңдеудің дербес шешімі - жүйенің еріксіз тербелісі.
2. 2. 23 Динамика теңдеулерін шешу әдістері. Қарапайым АРЖ-ні зерттеудің тікелей әдісіне мысал келтіру.
Автоматты реттеу жүйесінің динамикасын талдаумен байланысты кез-келген есепті шешу үшін ең алдымен зерттелетін жүйенің математикалық бейнесін беру кажет. Оны төмендегі ретпен жүргізеді:
1. Автоматты реттеу жүйесін (АРЖ) элементар буындарға бөледі;
2. Элементар буындардың қозғалыс теңдеуін құрады;
3. Қозғалыс теңдеулерді сызықтайды;
4. Өлшемсіз координаттар енгізеді.
Қозғалыс теңдеуі деп берілген кірістік координаттың уақыт бойынша өзгеруіне сәйкес шығыс координаттың да уақыт бойынша өзгеруін анықтайтын дифференциалдық теңдеуін айтады. Бұл теңдеуді көбінесе жүйенің динамикалық теңдеуі деп атайды. Автоматты реттеу жүйесінің бөлініп алынған элементінің динамикалық теңдеуін құрудың алғашқы қадамы ондағы өтетін процестің физикалық заңын анықтау. Жалпы мұндай заңдарға заттардың сақталу заңы (қысымды, деңгейді реттеу объектілері), энергияның сақталу заңы(температураны реттеу объектілері), Ньютонның екінші заңы (жылдамдықты реттеу объектілері) және басқа да физиканың негізгі заңдары жатады. Реттеу жүйесінің бұл элементтерінде өтетін процесті анықтайтын физикалық заңға сәйкес математикалық өрнек осы элементтің алғашқы дифференциалдық теңдеуі болады. Айта кетер бір жағдай, іс жүзінде көптеген агрегаттардың жұмыс істеу принциптері және құрылымдық безендірулері әртүрлі болады. Бірақта оларды материалдық және энергетикалық принциппен, мысалы, материалдық баланс үшін келесі дифференциалдық теңдеумен біріктіруге болады:
(1. 1)
Мұндағы -агрегаттағы материалдың запасы; - агрегатқа берілетін материалдар ағыны; - агрегаттан шығатын материалдар ағыны; t- уақыт.
Екінші қадам алғашқы теңдеулерге кіретін айнымалыларға тәуелді факторларды және осы өрнектерді анықтау болып табылады. Мұның соңғысы аналитикалық функция түрінде немесе графикалық түрде берілуі мүмкін. Көптеген жағдайларда олар сызықтық емес тәуелділіктер болулары мүмкін. Табылған өрнектерді алғашқы теңдеуге қоя отырып, элементтің сызықты емес теңдеуін аламыз.
Біздің мысалымызда агрегатқа берілетін , одан шығатын , материалдар ағындарының қандай шамалардан тәуелді екендіктерін және қандай өрнектермен жазылатындықтарын, сонымен қосагрегаттағы материалдың запасы М тұрақты ма жоқ па екендігін анықтау керек.
Динамика теңдеуін жасау үшін автоматты жүйе жеке буындарға ажыратылып, олардың әрқайсысы үшін сол буында өтетін процеске тән физикалық заң негізіне сәйкес теңдеулер құрылады.
Автоматты жүйенің барлық элементтері үшін құрылған динамика теңдеулерінің жиынтығы автоматты басқару процесін анықтайды.
Буындарда өтетін процестерді айқындайтын физикалық заңдар негізіне автоматты басқару жүйесі буындарының динамикасының теңдеулерін жасау автоматты жүйені есептеуде ең басты мәселе, өйткені бастапқы шартта жіберілген дәлсіздік кейінгі есептеулерді жоққа шығаруы мүмкін.
 арқылы элементар буынның кірісіне ықпал ететін физикалық шаманы, ал
арқылы элементар буынның кірісіне ықпал ететін физикалық шаманы, ал
 арқылы сол буынның шығыстық параметрін белгілесек, онда буынның дифференциал теңдеуі жалпы түрде мынандай болады:
арқылы сол буынның шығыстық параметрін белгілесек, онда буынның дифференциал теңдеуі жалпы түрде мынандай болады:

мұндағы
 өзгерісі өрнектелетін дифференциал теңдеудің реті;
m - x
кip
дифференциал теңдеудің реті;
өзгерісі өрнектелетін дифференциал теңдеудің реті;
m - x
кip
дифференциал теңдеудің реті;
 - уақыт. Дифференциал теңдеуі бейсызықты болуы ықтимал, өйткені
не
коэффициенттерінің біразы
-қа не
-ға тәуелді болуы мүмкін, сол себепті бұл теңдеуді пайдалану белгілі бір тиімсіздікті тудырады.
- уақыт. Дифференциал теңдеуі бейсызықты болуы ықтимал, өйткені
не
коэффициенттерінің біразы
-қа не
-ға тәуелді болуы мүмкін, сол себепті бұл теңдеуді пайдалану белгілі бір тиімсіздікті тудырады.


Элементар буын белгісі
№ 1 есеп
1-10 сызбаларда келтірілген электрлік тізбектің дифференциал теңдеуін құрып, беріліс функциясын анықтау керек. Оның амплитудалық-жиіліктік сипаттамасын (АЖС), фазалық жиіліктік сипаттамасын (ФЖС), амплитудалық-фазалық жиіліктік сипаттамасын (АФЖС) анықтап, графигін тұрғызу керек.
Ескертулер:
1) сызбаның нөмірін сынақ кітапшасының шифрының соңғыдан алдыңғы саны бойынша таңдаңыз;
2)
 белгімен тұрақты токтың күшейту коэффициенті к >> 1 инвертациялаушы күшейткіші белгіленген.
белгімен тұрақты токтың күшейту коэффициенті к >> 1 инвертациялаушы күшейткіші белгіленген.
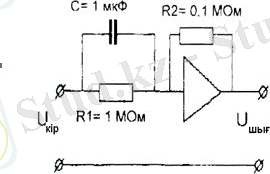
I. ; ;
I 1 +I 2 - I 3 =0 → I 1 +I 2 = I 3
+ =
... жалғасы
Сіз бұл жұмысты біздің қосымшамыз арқылы толығымен тегін көре аласыз.
- Іс жүргізу
- Автоматтандыру, Техника
- Алғашқы әскери дайындық
- Астрономия
- Ауыл шаруашылығы
- Банк ісі
- Бизнесті бағалау
- Биология
- Бухгалтерлік іс
- Валеология
- Ветеринария
- География
- Геология, Геофизика, Геодезия
- Дін
- Ет, сүт, шарап өнімдері
- Жалпы тарих
- Жер кадастрі, Жылжымайтын мүлік
- Журналистика
- Информатика
- Кеден ісі
- Маркетинг
- Математика, Геометрия
- Медицина
- Мемлекеттік басқару
- Менеджмент
- Мұнай, Газ
- Мұрағат ісі
- Мәдениеттану
- ОБЖ (Основы безопасности жизнедеятельности)
- Педагогика
- Полиграфия
- Психология
- Салық
- Саясаттану
- Сақтандыру
- Сертификаттау, стандарттау
- Социология, Демография
- Спорт
- Статистика
- Тілтану, Филология
- Тарихи тұлғалар
- Тау-кен ісі
- Транспорт
- Туризм
- Физика
- Философия
- Халықаралық қатынастар
- Химия
- Экология, Қоршаған ортаны қорғау
- Экономика
- Экономикалық география
- Электротехника
- Қазақстан тарихы
- Қаржы
- Құрылыс
- Құқық, Криминалистика
- Әдебиет
- Өнер, музыка
- Өнеркәсіп, Өндіріс
Қазақ тілінде жазылған рефераттар, курстық жұмыстар, дипломдық жұмыстар бойынша біздің қор #1 болып табылады.

Ақпарат
Қосымша
Email: info@stud.kz