Механизмді жобалау және оның құрылымдық, кинематикалық және кинетостатикалық талдауы

МАЗМҰНЫ
КІРІСПЕ 4
I. ЖОБАЛАУ ЖӘНЕ КИНЕМАТИКАЛЫҚ ТАЛДАУЫ6
1. 1. Механизмнің құрылымдық талдауы. 6
1. 2 Кинематикалық диаграммаларды құру 12
II. НЕГІЗГІ БҰРЫҚТЫҚ МЕХАНИЗМДІ ИНЕТОСТАТИКАЛЫҚ ЕСЕПТЕУ . . . 15
2. 1. Механизмнің таңбалауы мен қуат схемасының құрылысы………. 15
III. ТАЛДАУЫ . . . 20
3. 1. Жоспарлау әдісі . . . 20
3. 2. Жылдамдықты жоспарлау әдісі . . . 22
ҚОРЫТЫНЫ . . . 25
ПАЙДАЛАНҒАН ӘДЕБИЕТТЕР . . . 26
Кіріспе
Машина жасаудың басты міндеті - өнеркәсіптің барлық салаларын, ауылшаруашылығы мен ғылымды жоғары сапалы приборлармен қамтамасыз ету.
Машина жасаудың даму деңгейі едәуір дәрежеде еліміздің техникалық прогресс жолындағы жетістіктерін, қоғамның материалдық байлығының өсуін, халықтың әл-ауқатының және еңбек жағдайларының жақсаруын анықтайды. Сондықтан да еліміздің экономикалық және әлеуметтік даму жоспарларында машина жасауды дамытуға көп көңіл бөлініп, жекелеген машиналар мен технологиялық процестерді жетілдіру, өндірістің барлық саласын механикаландыру мен автоматтандыруды қамтамасыз ететін тиімділігі жоғары машиналар, жабдықтар, приборлар жасауға, оларды жаппай қолдануға көшуді дәйекті түрде жүзеге асыру міндеті қойылған.
Ғылыми-техникалық прогрестің қазіргі жоғары талабына сай мамандар даярлау- аса маңызды іс.
Машина жасау салаларының мамандарына жаңа машиналар мен механизмдер жобалайтын инженер-конструкторлар үшін де, машина жасау өнеркәсібі және оларды пайдалану саласында істейтін инженер-механиктер үшін де, ғылымның көптеген салаларымен бірге машиналар мен механизмдер теориясы (ММТ) білімдері өте қажет.
Әр түрлі приборларда, машиналарда және автоматты линияларда қолданылатын механизмдерді жетілдіруде, қазіргі талапқа сай жаңа машиналар мен механизмдер жобасын жасауда ММТ-ы ерекше орын алады.
Машиналар мен механизмдер теориясы механикалық жалпы принциптері мен заңдарына сүйене отырып қазіргі бас механизмдерді зерттейді және ерекше механизмдер жүйесін жасау әдістерін құрастырады. Машиналар мен механизмдер теориясынан курстық жұмыс осы пәнді игеріп, оқудың бір түрі болып есептеледі және мұнда пәннің негізгі бөлімдері қарастырылады.
Курстық жұмыстың негізгі мақсаты:
-пәннің материалдарын жақсылап ұғып, түсініп білуге септігін тигізу;
-студенттерді машиналар механизмдерін зерттеу және жұмыстың бастапқы кезеңдерінде өздігінен зерттеу, есептеу, графиктік жұмыстарын жүргізуге үйретіп, өзгерістер енгізіп, өздігінше шешім қабылдауға және жаңалықтар ашуға бейімдеу;
-механизмдерді жасаудың және зерттеудің жалпы тәсілдерін әр түрлі қызмет атқаратын белгілі машиналар мен жабдықтар және приборлар механизмдерін жасау және зерттеу үшін қолдана білуді үйрету;
-студенттерді жұмыстың есептерін шығару жолдарын ізденуде творчествалық ойлануға баулу;
-жұмысты қорғау кезіндде көпшілік алдында өзінің істеген жұмыстарының қорытындысын айтып, қабылдаған шешімдерін дәлелдеп, түсіндіріп баяндауына мүмкіндік беру.
Курстық жұмыста графиктік әдістермен есептер шығару қолданылады. Графиктік тәсілдерінің ерекшелігі-олардың оңайлылығы, көрнектілігі және жеңіл тексерілетіндігі. Сондай-ақ оның дәлдігі көпшілік практикалық есептерді, біркелкі графикалық операциялар жүргізілетін жағдайда графиктік тәсілдерді қолдану қиындайды, ол өте қиын есептерді шығару және жоғары дәлдік қажет болған жағдайларда, мұны қолану болмай қалады.
Машина жасау салаларының болашағы көлемі шағын электрондық жүйелі санды программамен басқарылатын автоматты жабдықтар өндірісінің, ауыр және сирек кездесетін станоктар мен машиналар, жоғары дәлдікті станоктар өндірісінің жедел дамуымен байланысты.
I. ЖОБАЛАУ ЖӘНЕ КИНЕМАТИКАЛЫҚ ТАЛДАУЫ
1. 1. Механизмнің құрылымдық талдауы
Құрылымдық талдаудың мақсаты - механизм құрылымын ашу (сурет 1. 1. ) .
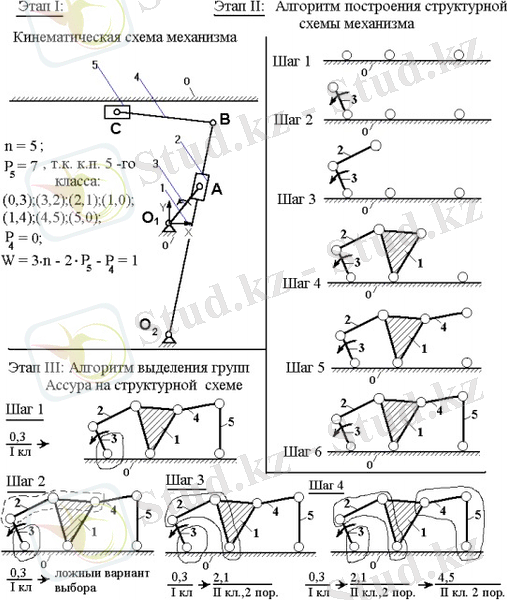
1. 1 сурет. Механизмінің құрылымдық талдауы
Құрылымдық талдау үш кезеңде жүзеге асырылады.
1 кезең:
- механизмнің буындарының санын (N = 6) анықтап, олардың әрқайсысын атаңыз (мысалы: ‖ 0 сілтеме - тірек, 3 сілтеме - иінді, 2 сілтеме - перденің жартасы, 1 сілтеме - к сілтеме және т. б. ) ; қозғалатын сілтемелер санын санау (n = N-1 = 5) ;
- кинематикалық жұптардың санын анықтаңыз (к. п. ) және олардың сипаттамаларын беріңіз (мысалы: - (0, 1) - айналмалы төменгі кинематикалық 5-ші жұп, (1, 2) - 5-ші кластың төменгі кинематикалық жұбы және т. с. с. КП бейнелейтін жақшалар 1. 1-суретте көрсетілген (I кезең) ) ; 5-ші кластың кинематикалық жұптарының санын (Р5 = 7) және одан жоғары ПӘК санын есептеңіз. 4-сынып (P4 = 0) ;
- механизмнің қозғалғыштық дәрежесін П. Л. формуласы бойынша анықтау. Чебышев (W = 1), яғни. жетекші звенолардың санын орнатыңыз (тапсырмалардағы механизмдер схемаларында жетекші звено айналу бағытын көрсететін көрсеткімен белгіленеді) ; егер бар болса, пассивті сілтемелерді және қажет емес еркіндік дәрежелерін алып тастаңыз (1. 1-суреттегі мысалда, жоқ) .
2 кезең:
- механизмнің құрылымдық сызбасын құру, онда барлық тиімділік 5 класс (айналмалы және аудармалы) диаметрі 3-5 мм шеңберлермен шартты түрде бейнеленген; тіреу онда орналасқан шеңберлермен тікелей немесе сынған үзік сызықпен бейнеленген (олардың саны тірекке жататын нүктелер санына немесе формальды түрде тірек нөмірі кездесетін жақшалар санына тең - «0»), 1. 1-сурет (II кезең, қадам 1) ; екі тиімділікке ие жылжымалы сілтемелер. 5-сынып, байламдармен бейнеленген (ұштары екі шеңберден тұратын ерікті ұзындықтағы түзу кесінділер) ; үш тиімділік нүктесі бар 5-сынып - бұрыштарында үш шеңбері бар еркін пішінді үшбұрыштар; төрт тиімділік нүктесі бар - төртбұрыштар және т. б. ; жоғары жұптар диаграммада 5-кластың екі төменгі жұптарымен жалған сілтеме ретінде бейнеленген (нүктелік сызықтың кесіндісімен бейнеленген баулы; баулыға нөмір берілмейді, ол сілтемелердің байланыс нүктесін белгілейтін кіші латын әрпімен белгіленеді) ;
- құрылыс формальды алгоритм бойынша жүзеге асырылады, бұл кездейсоқ күрделі механизмнің құрылымдық диаграммасын алуға мүмкіндік береді:
1-қадам: тіректі кп санымен сызылған сызықтың астындағы түзу немесе сынық сызық түрінде бейнелеу. (шеңберлер) «0» деген пост нөмірі бар жақшалар санына тең, 1. 1 сурет (II кезең, 1-қадам) ;
- 2-қадам: «жетекші сілтеменің саны (3) жақша ішінде неше рет пайда болды?» Деген сұраққа жауап бергеннен кейін жетекші сілтемені струт шеңберлерінің біріне бекітіңіз. Жауап 2 рет; қорытынды - 3 сілтеме - байлам », 1. 1-сурет (II кезең, 2-қадам) ;
- 3-қадам: Біз үш сұраққа жауап бергеннен кейін шешім қабылдаймыз. 1-сұрақ: «Ол қандай сілтеме жасайды? 3 сілтемесін ғана қарап шықтыңыз ба? Жауап 2 сілтемеде. « 2 сұрақ: «қаншалықты тиімділік? 2 сілтемені құрайды (2 цифры бар жақшаның саны қанша) ? Жауабы 2 кп, яғни. 2 сілтеме - байлам ». 3-сұрақ: «2 сілтеме струтқа қосыла ма, әлде формальды түрде (2. 0) немесе (0. 2) жақшалар бар ма? Жауап жоқ «. Қорытынды - 2 сілтеме (байлам) бір байланыс нүктесінің 3 сілтемесіне, ал екінші байланыс нүктесіне қосылады. еркін қалады, 1. 1 сурет (II кезең, 3-қадам) ;
- 4-қадам: осы сатыда және одан әрі, біз 3-қадамдағы әрекеттерді қайталаймыз. Мысалы, 4-қадам үшін 1-сұрақ: «бұл қандай сілтеме арқылы cp құрайды. сілтеме 2 жаңа ғана қаралды ма? Жауап 1 сілтеме бойынша. « 2 сұрақ: «қаншалықты тиімділік? сілтемелер формалары 1? Жауабы 3 кп, яғни. сілтеме 1 - үшбұрыш ». 3-сұрақ: «1 сілтеме струтқа қосыла ма, әлде ресми түрде (1, 0) немесе (0, 1) жақшалар бар ма? Жауап - иә ». Қорытынды - 1 сілтеме (үшбұрыш) бір тиімділіктің екінші сілтемесіне, екіншісіне қосылады. тіректің еркін шеңберіне қосылады, үшінші кп. еркін қалады, 1. 1 сурет (II кезең, 4-қадам) ; Осы әрекеттерді 6 қадаммен жалғастыра отырып, біз тиімділіктің бос элементтері жоқ соңғы құрылымдық диаграмманы аламыз, күріш. 1. 1. (II кезең, 5 және 6-қадамдар) .
3 кезең.
- Алынған құрылымдық диаграммада құрылымдық топтар (Assur топтары) 1. 1-суретте көрсетілген алгоритмге сәйкес анықталады. (III кезең) .
- бірінші қадамда бастапқы механизм (тірек және жетекші сілтеме) таңдалады және оның құрылымының формуласы бөлшек түрінде жазылады, оның нуматорында бастапқы механизмді құрайтын сілтемелердің (0 және 3) сандар тізімі келтіріліп, оның сыныбы бөлгіште көрсетіледі.
- Екінші қадамда екі сілтеме мен үш кинематикалық жұптан тұратын ең қарапайым топты таңдау әрекеті жасалады. Бұл әрекет жалған болып шығады, өйткені механизмдердің пайда болу принципі бұзылған - кинематикалық жұптардың еркін элементтер тобы тіркелген кезде қол жетімді болатын 0 және 3 сілтемелерге қосылуы керек, ал біздің жағдайда 1 сілтеме тіркеме кезінде әлі жоқ 4 сілтемеге қосылады.
- 3 және 4 қадамдарда механизмді қалыптастыру принципі сақталады. Нәтижесінде, 4-қадамда біз анықталған Ассур топтарының формулаларынан тұратын бүкіл механизмнің құрылым формуласын аламыз. Көрсеткілер құрылымдық топтардың қосылу сызбасын көрсетеді (дәйекті (1. 1-сурет) және параллель (1. 2-сурет) ) .
Құрылым формуласы бойынша механизмнің класы анықталады (ол оны құрайтын құрылымдық топтардың ең жоғарғы класына тең және алдағы есептеулердің күрделілігін анықтайды) және кинематикалық және күштік есептеулердің тәртібі. Біздің мысалда механизмнің класы екінші; кинематикалық есептеу тәртібі механизмнің пайда болу тәртібімен сәйкес келеді: алдымен бастапқы механизм есептеледі, содан кейін бірінші тіркелген топ (2. 1 сілтемелер; тиімділік (3. 2), (2. 1) және (1. 0) ), соңғысы есептеледі 4. 5 бірліктер тобы (б. т. (1. 4), (4. 5), (5. 0) ) . Күшті есептеу кері тәртіпте жүзеге асырылады.
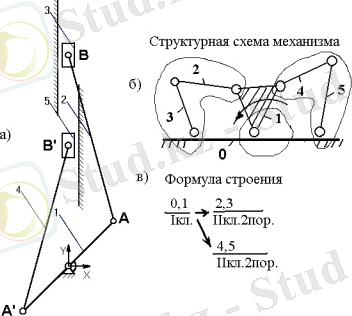
Сурет: 1. 2. Ассур топтарының параллель байланысының мысалы
а) механизмнің кинематикалық сызбасы
Сурет: 1. 3. Планер кинематикалық диаграммасы
Механизмнің құрылымдық талдауы (1. 3. 1 сурет)
Механизмнің құрылымдық құрамы (1. 3. 2 сурет)
Оқу әдебиеттерінен кинематикалық және күштік есептеулердің алгоритмдерін табу үшін 2-ші сыныптың құрылымдық топтарының типі, 2-ші реттік (барлығы 5 түрі бар) белгіленген. Біздің мысалда бірінші топ - 2-ші класс тобы, 3-ші типтегі 2-ші реттік (2-сілтеме (тас) және 1 (сілтеме) екі сыртқы айналмалы жұппен және ішкі трансляциялық жұппен үшінші типтегі екінші кластың екі сымды екі сымды тобын құрайды) ; екінші топ - бұл 2-ші класс тобы, 2-ші типтегі 2-ші реттік (4-сілтеме (байланыстырушы штанг) және 5 (жүгірткі) екінші айналмалы жұппен және сыртқы трансляциялық жұппен екінші типтегі екінші сымды екі сымды екі сымды топты құрайды) . Құрылымдық талдау түсіндірме жазбада жүзеге асырылады және 1, 5-2 А4 парақты құрайды. Түсінікті болу үшін құрылымдық талдау кестелер түрінде орындалуы мүмкін, мысалы кесте. 1. 1-суретке арналған 1. 1 және 1. 2.
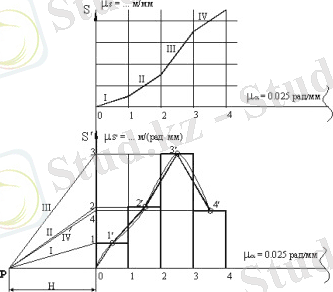
1. 2 Кинематикалық диаграммаларды құру
261 мм A1 парағының шетінен шығып, біз S(α), S'(α), S''(α) үш графикке ортақ ордината осін жүргіземіз. Біз sc = 0, 025 рад / мм шкаласы бойынша α = 2π шегін қоятын абцисса осьтерінің орналасуын белгілейміз. Осы бұрышты білдіретін кесіндінің ұзындығы 251, 3 мм. Сегментті ұзындығы 20, 9 мм 12 тең бөлікке бөліңіз. Әрбір бөлік - иінді айналдыра бұрылу бұрышын оның іргелес позициялары арасында білдіретін кесінді. Бөлу нүктелерін 0-ден 12-ге дейінгі сандармен белгілейік. Графиктердің ордината осі бойындағы шкалалар графиктің максималды биіктігі 80 - 100 мм болатындай етіп таңдалады. Белгілі бір жағдайда, қозғалатын буынның таңбалаудағы максималды қозғалысы (жүрісі) бірдей шектерде болған кезде S(α) орын ауыстыру функциясы графигінің масштабын l таңбалау шкаласына тең қабылдауға болады.
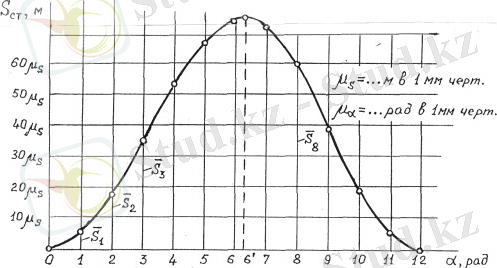
Сурет: 1. 4 Функциялар графигі
1. 4 суретте тегіс баспа машинасының үстелін механизм орналасуы бойымен жылжыту функциясын бейнелеудің мысалы келтірілген (1. 4-сурет) Бөлу нүктелерінен ординаталық түзулер жүргіземіз және келесі есептеу формуласы бойынша есептелген кесінділерді жұмыстан шығарамыз:

онда E0Ei таңбалаудан алынған және Е нүктесінің сол жақ шеткі позициясынан қазіргі жағдайына дейінгі арақашықтықты білдіретін кесінді. Формула бойынша есептелген әрбір сегмент ордината сызығында абцисса осінен жоғары қарай салынған, оның саны i санымен сәйкес келеді. Сондай-ақ, жетек қозғалатын буынның максималды орын ауыстыруына сәйкес максимум ординатаны құру керек.
Ұқсас әрекеттер күріш үшін график құрған кезде де орындалады. Формула бойынша есептелген кесінділер ординаталар бойынша кескінделеді, бірақ формулаға E0Ei кесіндісінің орнына B0Bi кесіндісі ауыстырылады. Максималды ордината максималды орын ауыстыру B B 0 үшін есептеледі және 5-ші және 6-шы позициялар арасында орналасады.
Ординаталардың ұштары радиусы 2 - 3 мм шеңберлермен белгіленеді, ал әрбір шеңбердің центрі сәйкес ординатаның соңында орналасқан. Ординаталардың ұштары арқылы шеңберлерді сызбай, өрнектер көмегімен тегіс қисық сызылады, ол қажетті график болып табылады. Ордината осі бойымен масштабты бөлуді әр 10 немесе 20 мм сайын кейінге қалдыру керек және мысалы, шығу нүктесінен 10 мм өткеннен кейін S мәні 10 S′(α), 20 мм-ден кейін 20S-ге тең және т. б. . д. графиктің жоғарғы жағына S′(α) = 0, 002м / мм үшін бізде сәйкесінше 0, 02 мәндері болады; 0, 04 және т. б. (метрмен) .
Графиктің соңғы дизайны үшін s қалыңдығы s контур сызығымен, қалыңдығы 0, 5 с координаталық осьтермен, (1/3 - 1/4) S сызық қалыңдығымен қисық сызу керек, ординаталық түзулер мен ординаталар осіндегі белгілер арқылы сызылған горизонтальдармен құрылған координаттар торын салу керек. Замечание. В случае если ведомых звеньев два, необходимо построить по два графика в одной системе координат.
S′(α) графикасын дифференциалдау үшін аккорд әдісін қолдана отырып, S′(α) диаграммасының графикалық дифференциалдау әдісімен саламыз. Бұл әдіс бірнеше қарапайым, бір мағыналы әрекеттерді қарастырады және тангенс әдісінен айырмашылығы, белгілі бір нүктеде қисыққа жанаманы сызудың күрделі операциясын қажет етпейді (бұл операцияны дәл орындау үшін қисықтық центрінің орнын анықтау керек) .
Біріншіден, біз S′(α) дифференциалданатын графикті I, II, III және т. с. с бөліктердегі қисықты ауыстыра отырып, кескінді сызықтық функцияға айналдырамыз. аккордтар.
Содан кейін S′(α) графигінің абсциссасының жалғасында P нүктесін - басынан H = 40 мм қашықтықта дифференциалдау полюсін таңдап, I, II сәулелерін салыңыз. Сәйкес аккордтарға параллель, S′(α) графигінің ордината осімен қиылысқанға дейін III және т. б. Алынған 1, 2, 3 нүктелері арқылы және т. б. абсцисса осіне параллель түзулер жүргізіп, аргументтің сәйкес бөліміне өзгерт (мысалы, I хорда үшін 0 - 1; IV хорда үшін 3 - 4) график
Сурет: 1. 5 Аккорд әдісі бойынша саралау
қажетті туынды - абсцисса осіне параллель түзу сызықты кесінді.
Орындалған әрекеттердің мағынасы қарапайым: сызықтық (сайттағы) функцияның туындысы тұрақты мән болып табылады және қажетті графика гистограмма (штрих-граф) түрінде алынады. Графиктің соңғы формасы бағаналардың ортасынан қисық қисық сызу арқылы алынады, яғни. графиктің нүктелері гистограмма бағандарының орта нүктелері болып табылады. Кестенің дизайны S′(α) кестесіндегідей ережелер бойынша орындалады. Графиктің масштабтық коэффициенті есептеледі, мысалы

Мысалдан μα = 0, 025 рад / мм және 0P = 40 мм үшін μS′жылдамдық аналогының графигінің масштаб коэффициенті орын ауыстыру графигінің масштабтық коэффициентіне тең екендігі шығады.
Үдеу аналогының графигін алу үшін жылдамдық аналогының графигін саралау кезінде ұқсас әрекеттерді жасаймыз, ол үшін ақырында алынған S′(α) графигі S′(α) Графигімен бірдей аралықтарда кесінді сызықтық функцияға айналады.
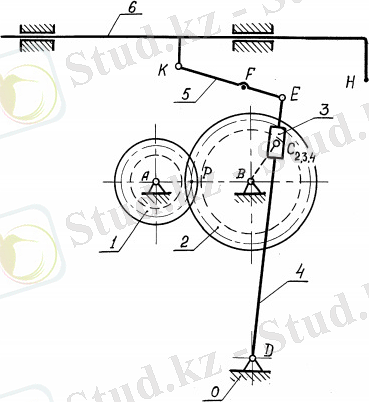
II. НЕГІЗГІ dБҰРЫҚТЫҚdМЕХАНИЗМДІ ИНЕТОСТАТИКАЛЫҚ ЕСЕПТЕУ.
Курстық жобаның бұл бөлімінде механизмдердің буындарына әсер ететін күштер анықталып, кинетостатиканың негізгі міндеті шешілді - реакциялар кинематикалық жұптарда кездеседі. Сонымен қатар, бұл бөлімде көрсетілген позициялар үшін механизм тиімділігінің лездік мәндері есептеледі.
Механизмнің қозғалатын буындарының қуатын есептеу тек Даламбер принципі негізінде мүмкін болады, яғни. барлық сыртқы жүктемелерге инерция күштері мен моменттерін қосу керек. Тек осы жағдайда күштер тепе-теңдігінің шарттары жеке буындар үшін де, буын топтары үшін де орындалады.
Күшті есептеу кезектілігі механизм құрылымының формуласымен анықталады: есептеу соңғы Ассур тобынан басталып, бастапқы механизмді есептеумен аяқталады. Механизмдер үшін күштің есебін келесі дәйектілікпен жүргізу керек: 4 - 5 топты есептеу, содан кейін 2 - 3 топтарды және алғашқы механизмді есептеуді 1 - 0. Механизм үшін топтардың параллель байланысы бар, сондықтан есептеу ретін өзгертуге болады: біріншіден, 2 топтың есебі - 3, содан кейін 4 - 5 топтар және алғашқы механизмді есептеу 1 - 0.
2. 1. Механизмнің таңбалауы мен қуат схемасының құрылысы
Механизмнің күштік есебіне арналған таңбаларды салу тәртібі кинематикалық талдау бөлімінде оның құрылысынан ерекшеленбейді, сондықтан мұнда қосымша түсініктемелер қажет емес. Белгілеуді құрастырғаннан кейін біз қуат схемасына жүгінеміз, оны бастапқы деректерден параққа ауыстыру керек. Сонымен қатар, таңбалаудың әр позициясында қарсылық күштерінің (немесе қозғаушы күштер - ішкі жану қозғалтқышы жағдайында) мәндерін анықтау және олардың осы ережелерге сәйкестігін белгілеу маңызды. Бұл тапсырма берілген сызбаны белгілеумен «байланыстыру» арқылы шешіледі. Есептің шешімін ішкі жану қозғалтқышының мысалында қарастырайық, оның индикаторлық сызбасы күріште көрсетілген. 2. 1. Диаграмманың абсцисса осін В нүктесінің траекториясына параллель бағыттайық, сонда максималды қысым жану камерасының көлемі минимум болатын B0 жоғарғы өлі нүктеге түседі. Абсцисса осіндегі бірліктің сегментінің ұзындығы 0 - 1, 0 поршендік соққысына тең болуы керек, ал ордината осі бойынша масштаб ерікті түрде таңдалады, өйткені салыстырмалы қысым диаграмманың координаталық торынан анықталады. Осы сәтте отын-ауа қоспасының жануы пайда болады. 0 позициядан 6 позицияға төмен бағытталған соққы кезінде жану камерасының көлемі артады және қысым төмендейді - бұл жұмыс инсультының фазасы. Бұл фазадағы салыстырмалы қысым суретте көрсетілгендей анықталады. 3-ші позиция үшін 2. 1. Одан кейін сарқылу фазалары (6, 7, … 12 позициялары - жоғары қозғалыс) және қабылдау фазалары (13, 14, … 18 позициялары - төмен қарай қозғалу) . Бұл фазалардағы салыстырмалы қысым аз және біз оны есептеулерде нөлге тең қабылдаймыз. Төртінші фазада - қысу фазасы (18, 19, . . . 24 позициялар - жоғары қарай қозғалу), салыстырмалы қысым 11-позиция үшін 3. 1 суретте көрсетілгендей болады.
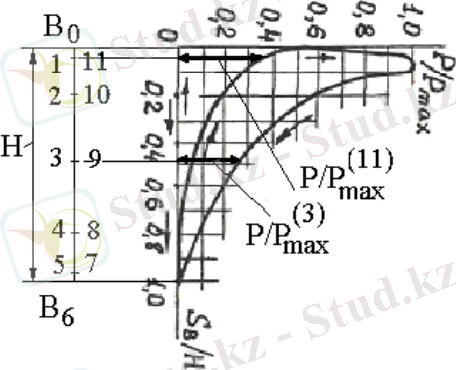
Сурет: 2. 1. Сыртқы күштің графигін механизмнің таңбалауымен байланыстыру
Салыстырмалы қысымның мәнін анықтағаннан кейін артық қысым pi = (P / Pmax) i ⋅ Pmax формуласы бойынша паскальдарда (N / m2) кездеседі, содан кейін Pgas. i газ күші Pgas. i = pi ⋅π⋅d 2/4 формуласы бойынша есептеледі. (H) . Поршеньнің диаметрі d (m) тапсырмада көрсетілген.
3. 3. Сыртқы күштің графигін салу, ауырлық күштерін, буындардың инерция күштері мен моменттерін есептеу
Сыртқы күштің графигін салу үшін біз абсцисса осі бойымен төрт сегментті бірінен соң бірін кейінге ысыратын, координаталар осінің жүйесін таңдаймыз, бұл абсцисса осі бойымен μS шкаласы бойынша нөлдік экстремалды позициядан басталады (2. 2, а-сурет) . Сегменттердің әрқайсысының мөлшері H= H/μS тең.
Содан кейін біз бірінші сегментті 1, 2, 3, . . . нүктелеріне, екінші сегментті 7, 8, 9, . . . нүктелеріне, үшінші сегментті 13, 14, 15 . . . нүктелермен, төртінші кесінділерді 19, 20, 21 . . . нүктелермен бөлеміз, оларға пропорционалды бөліктерге. басқарылатын звеноның белгілерінде алынатын бөлшектер. Графиктің көлденең өлшемі 150-180 мм болатындай етіп масштабты таңдаған жөн.
Ауқымы μP бойынша графиктің ордината осінің бойымен, біз қарсылық күші Pgas. i. мәнін білдіре сегменттерін растырады болады Ол үшін алдымен алдыңғы графиктен газ күшін 2. 2 бөлімінде сипатталған әдіс арқылы анықтаймыз. Бірақ күріш. 2. 1 (а) газ күшінің өзгеру графигі поршень қозғалысының бірінші фазасы - қабылдау фазасы, екіншісі - сығылу, үшіншісі - жұмыс инсульті, ал төртіншісі - сарқылған газ деген болжам бойынша құрылады. Онда қысым күріш. 1-позиция үшін 1. 1 13-ші жарамды болады.
Ауырлық күшін (салмақ) Gi (N), сондай-ақ i [Pi (N), Mii (N⋅m) ] сілтемесіне әсер ететін инерция күштерінің күші мен моментін есептеу үшін оның массасы mi (кг) мен осьтік инерция моментін ISi білу керек (kg⋅m 2) Si нүктесінен өтетін оське қатысты - I буын массасының центрі. Сілтемелер салмағы:

Ауырлық күштері әрдайым жердің центріне бағытталған, яғни. тігінен төмен. Сілтемелердің инерция күшінің негізгі векторлары:

мұндағы aSi - сілтеме массасының центрінің үдеуі (м / с2) . Байланыстардың инерция күштері олардың масса орталықтарының үдеуіне қарама-қарсы бағытталған.
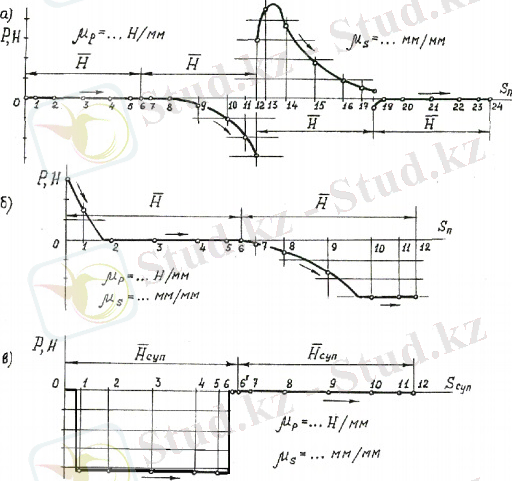
Сурет: 2. 1 Шығару сілтемесіне әсер ететін күштер графиктерінің шамамен көрінісі:
а - төрт жүрісті ішкі жану қозғалтқышы;
b - компрессор;
c - кросс-планер Ауырлық күштері мен инерция күштері буындар массаларының центрлерінде - Si қолданылады.
Инерция күштерінің негізгі сәттері:

Инерция күштерінің моменттері бұрыштық үдеулерге қарама-қарсы бағытталған.
Мi1 = 0 механизмдері үшін, өйткені ω1 = const үшін, ε1 = 0. Mi3 = 0 механизмдері үшін - 3 сілтеменің трансляциялық қозғалысы (-3 = 0) . Сонымен, трансляциялық қозғалатын буындар (сырғытпалар) және айналатын біркелкі қозғалатын буын (иінді) үшін инерциялық жүктеме инерция күштерінің негізгі векторынан тұрады Pii (егер иінді массаның центрі оның айналу центрімен сәйкес келсе, Pi1 = 0) .
... жалғасыСіз бұл жұмысты біздің қосымшамыз арқылы толығымен тегін көре аласыз.
- Іс жүргізу
- Автоматтандыру, Техника
- Алғашқы әскери дайындық
- Астрономия
- Ауыл шаруашылығы
- Банк ісі
- Бизнесті бағалау
- Биология
- Бухгалтерлік іс
- Валеология
- Ветеринария
- География
- Геология, Геофизика, Геодезия
- Дін
- Ет, сүт, шарап өнімдері
- Жалпы тарих
- Жер кадастрі, Жылжымайтын мүлік
- Журналистика
- Информатика
- Кеден ісі
- Маркетинг
- Математика, Геометрия
- Медицина
- Мемлекеттік басқару
- Менеджмент
- Мұнай, Газ
- Мұрағат ісі
- Мәдениеттану
- ОБЖ (Основы безопасности жизнедеятельности)
- Педагогика
- Полиграфия
- Психология
- Салық
- Саясаттану
- Сақтандыру
- Сертификаттау, стандарттау
- Социология, Демография
- Спорт
- Статистика
- Тілтану, Филология
- Тарихи тұлғалар
- Тау-кен ісі
- Транспорт
- Туризм
- Физика
- Философия
- Халықаралық қатынастар
- Химия
- Экология, Қоршаған ортаны қорғау
- Экономика
- Экономикалық география
- Электротехника
- Қазақстан тарихы
- Қаржы
- Құрылыс
- Құқық, Криминалистика
- Әдебиет
- Өнер, музыка
- Өнеркәсіп, Өндіріс
Қазақ тілінде жазылған рефераттар, курстық жұмыстар, дипломдық жұмыстар бойынша біздің қор #1 болып табылады.

Ақпарат
Қосымша
Email: info@stud.kz