Рычагты механизмнің құрылымдық және кинематикалық талдауы мен жұдырықшалы механизмнің синтезі

Мазмұны:
Кіріспе . . . 3
1 . Механизмнің құрылымдық талдауы . . . 5
2 Механизмнің кинематикалық анализі . . . 7
3 Он екі орын үшін орындар планы . . . 8
4 12 орын үшін жылдамдықтар планын құру . . . 9
5 Үдеулер планын құру . . . 11
6 Кинематикалық диаграммалардың масштабтары . . . 16
7 Жұдырықшалы механизмнің синтезі . . . 17
8 Кинематикалық диаграммаларды құру . . . 18
Қорытынды . . . 20
Қолданылған әдебиеттер . . . 22
Кіріспе
Машина жасаудың басты міндеті - өнеркәсіптің барлық салаларын, ауылшаруашылығы мен ғылымды жоғары сапалы приборлармен қамтамасыз ету.
Машина жасаудың даму деңгейі едәуір дәрежеде еліміздің техникалық прогресс жолындағы жетістіктерін, қоғамның материалдық байлығының өсуін, халықтың әл-ауқатының және еңбек жағдайларының жақсаруын анықтайды. Сондықтан да еліміздің экономикалық және әлеуметтік даму жоспарларында машина жасауды дамытуға көп көңіл бөлініп, жекелеген машиналар мен технологиялық процестерді жетілдіру, өндірістің барлық саласын механикаландыру мен автоматтандыруды қамтамасыз ететін тиімділігі жоғары машиналар, жабдықтар, приборлар жасауға, оларды жаппай қолдануға көшуді дәйекті түрде жүзеге асыру міндеті қойылған.
Ғылыми-техникалық прогрестің қазіргі жоғары талабына сай мамандар даярлау- аса маңызды іс.
Машина жасау салаларының мамандарына жаңа машиналар мен механизмдер жобалайтын инженер-конструкторлар үшін де, машина жасау өнеркәсібі және оларды пайдалану саласында істейтін инженер-механиктер үшін де, ғылымның көптеген салаларымен бірге машиналар мен механизмдер теориясы (ММТ) білімдері өте қажет.
Әр түрлі приборларда, машиналарда және автоматты линияларда қолданылатын механизмдерді жетілдіруде, қазіргі талапқа сай жаңа машиналар мен механизмдер жобасын жасауда ММТ-ы ерекше орын алады.
Машиналар мен механизмдер теориясы механикалық жалпы принциптері мен заңдарына сүйене отырып қазіргі бас механизмдерді зерттейді және ерекше механизмдер жүйесін жасау әдістерін құрастырады. Машиналар мен механизмдер теориясынан курстық жұмыс осы пәнді игеріп, оқудың бір түрі болып есептеледі және мұнда пәннің негізгі бөлімдері қарастырылады.
Курстық жұмыстың негізгі мақсаты:
-пәннің материалдарын жақсылап ұғып, түсініп білуге септігін тигізу;
-студенттерді машиналар механизмдерін зерттеу және жұмыстың бастапқы кезеңдерінде өздігінен зерттеу, есептеу, графиктік жұмыстарын жүргізуге үйретіп, өзгерістер енгізіп, өздігінше шешім қабылдауға және жаңалықтар ашуға бейімдеу;
-механизмдерді жасаудың және зерттеудің жалпы тәсілдерін әр түрлі қызмет атқаратын белгілі машиналар мен жабдықтар және приборлар механизмдерін жасау және зерттеу үшін қолдана білуді үйрету;
-студенттерді жұмыстың есептерін шығару жолдарын ізденуде творчествалық ойлануға баулу;
-жұмысты қорғау кезіндде көпшілік алдында өзінің істеген жұмыстарының қорытындысын айтып, қабылдаған шешімдерін дәлелдеп, түсіндіріп баяндауына мүмкіндік беру.
Курстық жұмыста графиктік әдістермен есептер шығару қолданылады. Графиктік тәсілдерінің ерекшелігі-олардың оңайлылығы, көрнектілігі және жеңіл тексерілетіндігі. Сондай-ақ оның дәлдігі көпшілік практикалық есептерді, біркелкі графикалық операциялар жүргізілетін жағдайда графиктік тәсілдерді қолдану қиындайды, ол өте қиын есептерді шығару және жоғары дәлдік қажет болған жағдайларда, мұны қолану болмай қалады.
Машина жасау салаларының болашағы көлемі шағын электрондық жүйелі санды программамен басқарылатын автоматты жабдықтар өндірісінің, ауыр және сирек кездесетін станоктар мен машиналар, жоғары дәлдікті станоктар өндірісінің жедел дамуымен байланысты.
- Механизмнің құрылымдық талдауы
Механизмге құрылымдық талдау жүргізген кезде қозғалатын және қозғалмайтын звенолар санын, кинематикалық жұптар класын және еркіндік дәреже санын анықтаймыз. Механизмді Ассур топтарына жіктеп, қандай класқа және қандай түрге жататындығын қорытындылауымыз қажет. Маған сүргілеу білдегінің механизмі берілді (сурет 1) .
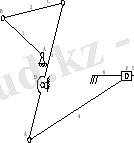 Сурет 1. Рычагты механизм.
Сурет 1. Рычагты механизм.
Бұл механизм келесі звенолардан тұрады:
0 - тірек;
1 - айналшақ;
2 - бұлғақ;
3 - кулиса;
4 - кулиса тасы;
5 - тиек;
Яғни, бұл механизм тіректен және бес қозғалмалы звенодан тұрады.
Енді, механизмнің қандай кинематикалық жұптардан тұратындығын анықтаймыз.
- А (0, 1) - V класты, айналмалы, жазық, төменгі кинематикалық жұп;
- В (1, 2) - V класты, айналмалы, жазық, төменгі кинематикалық жұп;
- С (2, 3) - V класты, айналмалы, жазық, төменгі кинематикалық жұп;
- D (3, 0) - V класты, айналмалы, жазық, төменгі кинематикалық жұп;
- E (3, 4) - V класты, ілгерілемілі, жазық, төменгі кинематикалық жұп;
- E` (4, 5) - V класты, айналмалы, жазық, төменгі кинематикалық жұп;
- F (5, 0) - V класты, ілгерілемелі, жазық, төменгі кинематикалық жұп.
Берілген рычагты механизм тек қана V класты жазық, төменгі кинематикалық жұптардан тұратын болғандықтан жазық механизм болып табылады.
Жазық механизмнің еркіндік дәреже саны Чебышев формуласымен анықталады :
мұндағы, n-қозғалмалы звенолар саны;
p 5 , p 4 - сәйкесінше V, IV класты кинематикалық жұптар саны.
Яғни, берілген механизм бірқозғалмалы болып табылады.
Механизмді құрылымдық топтарға жіктейміз (сурет 2 - а, ә, б) :
а)
ә)
Б)

а) I класты механизм; ә) II класты 1 түрлі Ассур тобы; б) II класты 3 түрлі Ассур тобы
Сурет 2. Жетекші звено 1 болғандағы механизмнің құрылымдық топтары.
Механизмнің құрылымдық формуласы:
Механизмнің класы құрамындағы Ассур топтарының ең үлкен класымен анықталады. Яғни маған берілген механизм II класты.
Механизмнің құрылымдық формуласы:
2. Механизмнің кинематикалық анализі
Механизмдер кинематикасы уақыт факторын есепке ала отырып, ал әсер етуші күштерді ескермей звенолармен олардың жеке нүктелерінің қозғалысын зерттейді.
Механизмді кинематикалық зерттеу деп, әдетте графиктік кескіндеумен есептеу нәтижесінде әрбір звеноның орналасу қаупін, звено нүктелерінің орын ауыстыруымен немесе звеноның бұрылу бұрыштарын, звенолар нүктелерінің сызықтық жылдамдықтарын және үдеулерін, звенолардың бұрыштық жылдамдықтары мен бұрыштық үдеулерін және механизмнің басқа да кинематикалық параметрлерін анықтайтын процесті айтады.
Механизмнің звено нүктелерінің жылдамдығын анықтау, атап айтқанда, машиналардағы жұмыс процесінің жағдайын анықтау үшін қажет. Жылдамдықты білген соң, үдеуді анықтауға болады, ал үдеуді білген соң олар арқылы инерция күші мен оның түсу нүктесін табуға болады. Шапшаң жүретін және ауыр звенолы машиналарда звенолардың қозғалысы біркелкі болмауына байланысты оларда инерция күші үлкен, сондықтан оларды беріктікке есептеу кезінде бұл күшті ескеру қажет.
Сөйтіп машина жұмысының сапасын анықтау немесе күш анализі үшін кинематикалық анализ жасау жұмысы жүргізіледі. Оның үстіне кинематикалық анализ машиналарына көшу үшін де бір басқыш болып табылады.
Механизмдердің кинематикалық анализі үшін графиктік, графаналитикалық және аналитикалық әдістер бар, бұл жоғарғы математика мен теориялық механиканың теориялары мен ұғымдарына сүйенеді.
Звено нүктелерінің координаталарының, жылдамдықтарын және үдеулерін есептеу механизм жұмысының толық циклінің арасындағы бірқатар орналасу қалыптары үшін жасалынады да, мұның өзі механизм нүктесінің траекториясы мен орын ауыстыру графигін құру жылдамдық пен үдеудің годографикасы дұрыс баға беру үшін қажетті параметрлерді анықтауға мүмкіндік туғызады.
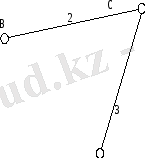
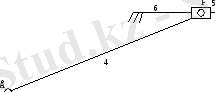
3 Он екі орын үшін орындар планы
Белгілі бір масштабпен шартты белгілер бойынша жасалған механизмнің графиктік кескіш оның планы деп аталады.
Механизмдердің қатарындағы құрылымдық топтардың барлық звеноларының орындары жетекші звеноның орындарымен толық және бір мәнде анықталады. Сондықтан механизм планын құрғанда жетекші звенолардың орындарын жетекші звеноның берілген орындарына сәйкес құрады. Механизм планын құрғанда барлық звенолардың ұзындықтары және қозғалмайтын топсалардың центрлерінің координаталары және жетекші звеноның қозғалыс заңы берілген болуы керек.
А1 форматына орындар планын сызу үшін ең алдымен оның масштабын таңдап аламыз:
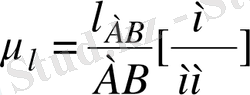
мұндағы - айналшақ ұзындығының нақты мәні, м ;
AB - айналшақ ұзындығының сызықтық мәні, мм.
 =
=0, 0012
=
=0, 0012
Механизмнің звеноларының ұзындықтарымен тіреуіштерінің арақашықтығын анықтау үшін берілген арақашықтарды және ұзындықтарды масштабқа бөлеміз:
Жоғарыдағы формулалар бойынша звенолардың ұзындықтары мен тіреуіштерінің арақашықтықтарын анықтаймыз :
Енді осы анықталған сызбалық мәндер бойынша он екі орындар үшін механизмнің сұлбасын «қию» әдісімен саламыз.
4 12 орын үшін жылдамдықтар планын құру
Жылдамдықтар планы векторлық әдіс пландар әдісімен құрылады. Жылдамдықтар планын құру үшін оның масштабын таңдап аламыз.
A және D нүктелерінің жылдамдығы:

Айналшақтың В нүктесінің жылдамдығы:
Мұндағы, 1 звеноның бұрыштық жылдамдық, [с -1 ]
 - 1 звеноның ұзындығының нақты мәні,
- 1 звеноның ұзындығының нақты мәні,
Бұрыштық жылдамдықты келесі формуламен анықтаймыз:
- 1 звеноұзындығының айналу жиілігі
=
=
= 429
= ,


3 звено үшін В нүктесінің жылдамдығы:
=
+
 нүктесінің жылдамдығы келесі қатынастардан табылады:
нүктесінің жылдамдығы келесі қатынастардан табылады:
Е - нүктесінің жылдамдығын келесі формуламен анықтаймыз:

Құрылған жылдамдықтар планы бойынша нүктелер мен звенолардың аналогтарының мәндері бойынша нақты мәндерін келесі формула бойынша есептейміз:
=p
· µ
v

V
D
= pd· µ
v

V
E
= pe· µ
v
=p
· µ
v
V
BC
=
c· µ
v
V
DE
= ed· µ
v
Келесі формула бойынша бұрыштық жылдамдықтарды анықтаймыз:
ω 2 = ω 3
ω
3
=

Есептеу нәтижелерін бірінші кестеге енгіземіз.
5 Үдеулер планын құру
Механизмнің үдеулер планын векторлық әдіспен кескіндеу үшін бізге сан мәні белгілі жетекші звеноның үдеуін анықтап (a А ) және оған қатысты масштаб таңдаймыз.

= 1 AB
Мұндағы, 1 - бірінші звеноның бұрыштық үдеуі, с -2 .
 =
0, 06 = 120. 97
.
=
0, 06 = 120. 97
.
Үдеулер планын берілген тапсырма бойынша 4-ші және 11-шы орындарға жасаймыз. Кез келген нүктесінен кескінін тиісінше керек орынға параллель жүргізіп, табылған масштабқа сәйкес ары қарай кескіндеу үшін келесі теңдеулер жүйесін графиктік әдіспен шешеміз :


Мұндағы:
 звеносының нормаль үдеу;
звеносының нормаль үдеу;

 звеносының тангенциаль үдеу;
звеносының тангенциаль үдеу;
5-ші орын үшін үдеулер планының масштабын есептейміз:
a = = =0, 806
Бұл теңдеуді кескіндегенде алдымен кориолис үдеуін анықтаймыз.
мұндағы үшінші звеноның төртінші орын үшін бұрыштық жылдамдығы;
= =
= 3. 1
(2. 3. 6) формула бойынша кориолис үдеуінің сан мәнін есептейміз :
2
4. 5

Келесі формула бойынша кориолис үдеуінің сызықтық мәнін есептейміз :
Механизмнің төртінші звеносы үшін нормаль үдеуді анықтаймыз :

 28, 3
28, 3
Келесі формула бойынша нормаль үдеудің сызықтық мәнін есептейміз :

 =
=
Механизмнің 5 звеносы үшін тангенциаль үдеуді анықтаймыз :
сызбадан аламыз, мм.
=92, 68· = 74, 7
Механизмнің 5 звеносы үшін тангенциаль үдеуді анықтаймыз :
сызбадан аламыз, мм.
=108. 74· = 87. 6
Механизмнің 5 звеносы үшін релятивті үдеуді анықтаймыз :
сызбадан аламыз, мм.
6. 45 · = 5. 2
Келесі формула бойынша E нүктесінің үдеуін есептейміз:
: cb 3


Сызбадағы D және Е нүктесінің орнын анықтаймыз :

Барлық звено үшін бұрыштық үдеуді анықтаймыз:
l
=92, 68· = 74, 7
=108. 74· = 87. 6
 =
=350. 4
=
=350. 4

12-шы орын үшін үдеулер планының масштабын есептейміз:
a = = =0. 806
Бұл теңдеуді кескіндегенде алдымен кориолис үдеуін анықтаймыз.
мұндағы он бірінші звеноның бұрыштық жылдамдығы;
=
= 0. 3
(2. 3. 6) формула бойынша кориолис үдеуінің сан мәнін есептейміз :
2 12. 3
Келесі формула бойынша кориолис үдеуінің сызықтық мәнін есептейміз :
Механизмнің 12 звеносы үшін нормаль үдеуді анықтаймыз :
 17
17
Келесі формула бойынша нормаль үдеудің сызықтық мәнін есептейміз :
=
Механизмнің 12 звеносы үшін тангенциаль үдеуді анықтаймыз :
сызбадан аламыз, мм.
=189. 49· = 152. 7
Механизмнің 12 звеносы үшін тангенциаль үдеуді анықтаймыз :
сызбадан аламыз, мм.
=3. 32· = 2. 7
Механизмнің 12 звеносы үшін релятивті үдеуді анықтаймыз :
сызбадан аламыз, мм.
13. 08 · = 10. 5
Келесі формула бойынша D нүктесінің үдеуін есептейміз:
: cb 3


Сызбадағы D және Е нүктесінің орнын анықтаймыз :
Барлық звено үшін бұрыштық үдеуді анықтаймыз:

=3. 32· = 2. 7
=
=10. 8
6 Кинематикалық диаграммалардың масштабтары.
диаграммасын құру үшін абсцисса өсінде айналшақтың 2 толық бір айналымын өрнектейтін мм кесіндіні жүргіземіз. Сонда орын ауыстыру диаграммасының абсцисса өсінің масштабы мына формуламен анықталады:
;
Орын ауыстыру диаграммасының ордината өсінің масштабы мына формуламен анықталады:
;
мұндағы: - коэффициент; - механизмнің М-12 орындар планының масштабы.
Орын ауыстыру планынындағы «Е» нүктесінің жүрісінің сан мәнін 3 есе көбейткен болсақ, онда коэффициент -ге тең болады. Енді орын ауыстыру диаграммасының ордината өсінің масштабын табамыз:
;
Жылдамдықтар диаграммасының ордината өсінің масштабы келесі формуламен анықталады:
;
мұндағы: - орын ауыстыру диаграммасының ординатасының масштабы, ;
- орын ауыстыру диаграммасының абсцисса осінің масштабы, ;
- жылдамдықтар диаграммасының полюстік қашықтығы, мм;
- 1-ші звеноның бұрыштық жылдамдығы, м/с.
1-ші звеноның бұрыштық жылдамдығы келесі формуламeн анықталады анықталады:
;
мұндағы: - тісті механизмның звенолар саны, ;
= ,
=
=
= 429
Енді жылдамдықтар диаграммасының ордината өсінің масштабын анықтаймыз:
Үдеулер диаграммасының ордината өсінің масштабы келесі формуламен анықталады:
... жалғасыСіз бұл жұмысты біздің қосымшамыз арқылы толығымен тегін көре аласыз.
- Іс жүргізу
- Автоматтандыру, Техника
- Алғашқы әскери дайындық
- Астрономия
- Ауыл шаруашылығы
- Банк ісі
- Бизнесті бағалау
- Биология
- Бухгалтерлік іс
- Валеология
- Ветеринария
- География
- Геология, Геофизика, Геодезия
- Дін
- Ет, сүт, шарап өнімдері
- Жалпы тарих
- Жер кадастрі, Жылжымайтын мүлік
- Журналистика
- Информатика
- Кеден ісі
- Маркетинг
- Математика, Геометрия
- Медицина
- Мемлекеттік басқару
- Менеджмент
- Мұнай, Газ
- Мұрағат ісі
- Мәдениеттану
- ОБЖ (Основы безопасности жизнедеятельности)
- Педагогика
- Полиграфия
- Психология
- Салық
- Саясаттану
- Сақтандыру
- Сертификаттау, стандарттау
- Социология, Демография
- Спорт
- Статистика
- Тілтану, Филология
- Тарихи тұлғалар
- Тау-кен ісі
- Транспорт
- Туризм
- Физика
- Философия
- Халықаралық қатынастар
- Химия
- Экология, Қоршаған ортаны қорғау
- Экономика
- Экономикалық география
- Электротехника
- Қазақстан тарихы
- Қаржы
- Құрылыс
- Құқық, Криминалистика
- Әдебиет
- Өнер, музыка
- Өнеркәсіп, Өндіріс
Қазақ тілінде жазылған рефераттар, курстық жұмыстар, дипломдық жұмыстар бойынша біздің қор #1 болып табылады.

Ақпарат
Қосымша
Email: info@stud.kz