Орта мектепте робототехника негіздерін оқыту ерекшеліктері

Қазақстан Республикасы Білім және ғылым министрлігі
І. Жансүгіров атындағы Жетісу университеті
Ә. Е. Кәртаева, А. Ж. Мұсанова, Б. Б. Нұров
Робототехника негіздерін орта мектепте оқыту ерекшеліктері
ДИПЛОМДЫҚ ЖОБА
6В01505 - «Информатика» мамандығы бойынша
Талдықорған 2021
Қазақстан Республикасы Білім және ғылым министрлігі
І. Жансүгіров атындағы Жетісу университеті
«Қорғауға жіберілді»
Кафедра меңгерушісі Ж. Жиембаев
Робототехника негіздерін орта мектепте оқыту ерекшеліктері
ДИПЛОМДЫҚ ЖОБА
6В01505 - «Информатика» мамандығы бойынша
Орындаған Ә. Е. Кәртаева
А. Ж. Мұсанова
Б. Б. Нұров
Ғылыми жетекшісі
п. ғ. к., қауымдастырылған
профессор (доцент) м. а. А. О. Алдабергенова
Талдықорған 2021
Мазмұны
РОБОТОТЕХНИКА НЕГІЗДЕРІ ЖАЙЛЫ ЖАЛПЫ МАҒЛҰМАТ
АН ОҚЫТУДЫ ҰЙЫМДАСТЫРУ НЕГІЗДЕРІ . . .
- Робототехниканың даму тарихы . . .
- Әлемдік нарықтағы робототехника . . .
КІРІСПЕ
Ғылым және техниканың қандайда бір саласының пайда болуы өте күрделі үрдістердің бірі. Оның дамуы белігілі бір уақыт интервалындағы басқа объективті және субъективті себептер мен жағдайларға өзара тәуелді және байланысты. Кейбір жағдайларда техникалық құрал бірінші пайда болып, оны ғылыми тұрғыда дамуына, бағытына сілтеу бола алады. Ал басқа жағдайларда, ғылыми зерттеулердің арқасында жаңа техниканы ойлап табуға немесе жетілдіруге жағдай туады. Робототехниканың құрылуы және даму тарихы, сонымен қатар, робот құралдарының жетілдірілуі мен шығарылу үдерісі, ғылыми даму бағыты мен жаңа техниканың құруына байланысты күрделі себеп-салдарды растайды. Осыған қоса, ғылыми білім саласында алғы шарттар және тәжірибе жинау үдерісінде, алғашқыда қарапайым, ал содан соң одан біршама күрделі құралдар дайындау шарттары құрылды.
Қазіргі кезде роботтар өміріміздің көптеген саласына, атап айтқанда, ғарышты игеру, денсаулық сақтау, өндіріс, қоғамдық қауіпсіздікті қамтамасыз ету, қорғаныс ісі және басқа да салаларға еніп үлгерді. Робот адамның немесе жануарлардың барлық дерлік қызметтері мен іс-әрекеттерін толық немесе жартылай атқара алады. Бірінші роботтар адамның кейбір қозғалыстары мен сырт келбетін ғана қайталады. Олар көрермендердің көңілін көтеру үшін ғана пайдаланылды. Ал қазіргі уақытта адамның күнделікті тұрмыс - тіршілігінде көптеген қызметтерді атқаратын, мысалға, бақылаушы қызметін атқаратын, қарт адамдарға, мүгедектерге және сәбилерге көмек көрсететін, күтушісінің көңілін көтере алатын және тағы да басқа роботтар көптеп құрастырылуда. Қазақстан Республикасында өнеркәсіптің жеделдетіле индустрияландырылуы, жаңа технологиялардың қарқынды дамуы өскелең ұрпақты жоғарғы білікті техникалық сала мамандары ретінде даярлауды талап етеді. Соңғы жылдары біздің мемлекетімізде робототехника көптеген салаларда қарқынды қолданыс табуда. Атап айтатын болсақ: білім саласында, өнеркәсіпте, ғарышты игеруде, медицина саласында, тұрмыста және т. б. яғни, роботтарды меңгеруге, оларды зерттеп, күнделікті өмірімізде қолдануға деген сұраныс өте жоғары. Бұл сұраныстың себебі айқын: біздің мемлекетіміз өзге дамыған мемлекеттермен салыстырғанда нақ осы робототехника саласы бойынша бірнеше ондаған жылдар артта қалып бара жатқаны белгілі. Робототехниканы меңгерген мамандар қазіргі өндіріс пен өнеркәсіпте үлкен сұранысқа ие. Бұл бағыттағы мамандарды даярлау мектеп табалдырығынан бастау алу керек. Сондықтан да, мектепте білім беру робототехникасы бүгінгі күнде маңызды және өзекті болып отыр. Сонымен қатар, робототехниканы оқыту, оның ішінде орта мектепте оқыту әдістемесін зерттеу осы мәселенің шешімін табуда үлкен көмек болар еді. Ендеше аталған сұраныс пен осы сұраныстың арасында үлкен қарама - қайшылық туындап отыр.
Анықталған қарама-қайшылық зерттеу тақырыбын «Робототехника негіздерін орта мектепте оқыту ерекшеліктері» деп алуымызға негіз болды. Бұл дипломдық жобада орта мектепте оқытылатын LEGO® MINDSTORMS® EV3 жинағынан роботтарды құрастыру әдістері және оларды қолдану тәсілдері көрсетіледі, бұл зерттеу жұмысының өзектілігін анықтайды. Сонымен қатар, оқушылардың танымдық үдерістерді дамыту міндеттерін шешуге, ойлау формаларын дамытуға, жеке тұлға қасиеттерін дамытуға мүмкіндік береді. Оқушыларды робототехника саласындағы зерттеулерге тарту, техникалық ақпаратпен және алғашқы инженерлік біліммен алмасу, жаңа ғылыми-техникалық идеяларды игеру оқу үдерісінде жаңа педагогикалық тәсілдерді қолдану және жаңа ақпаратты пайдалану арқылы жоғары сапалы білім алуға қажетті жағдай жасауға болады.
Робототехниканы оқытудағы басты мақсат - жеке тұлғаның ақпараттық біліктілігінің негізін қалау, яғни оқушыларға ақпаратты жинау әдістерін, сондай-ақ, оны пайымдау және тәжірибеде қолдану технологияларын меңгеруге көмектесу. Сондай - ақ, робототехника курсында жобаларды әзірлеу барысында оқушылар өздерінің танымдық, шығармашылық дағдыларын дамытуға, сондай-ақ дербестігіне өте тиімді әсер ететін өз тәжірибелерімен бір-бірімен бөлісе алады. Осылайша, Лего оқушыларға қоршаған орта ерекшеліктері мен бар қосалқы материалдарды ескере отырып, осы жағдайда пайдалануға болатын шешімдерді өз бетінше қабылдауға мүмкіндік беретініне көз жеткізуге болады. Және тағы да бір маңыздысы-өз әрекеттерін айналасындағылармен келісіп жасай білуі, яғни командада жұмыс істеу дағдысын игереді.
Зерттеу нысаны: робототехникалық жүйелер және робототехникалық құралдармен оқу үдерісін қамтамасыз ету жолдары.
Зерттеу пәні: робототехника негіздері оқыту үдерісі.
Зерттеу жұмысының мақсаты: Орта мектепте робототехника негіздерін оқыту ерекшеліктерін анықтау.
Жоғарыда қойылған мақсатқа жету үшін келесі міндеттер қойылды:
- зерттеу тақырыбы бойынша теориялық материалдарды жинау және жинақталған материалдарды өңдеу;
- робототехникалық жүйелерді талдау және оларды құруға қойылатын талаптарды айқындау;
- робототехниканың мектептің білім беру кеңістігіндегі орны мен рөлін анықтау;
- робототехника негіздерін оқыту технологиялары, формалары мен әдістерін негіздеу;
- жиналған мәліметтерді негіздеп, бір әдістемеге жинақтау.
Зерттеудің теориялық маңыздылығы: робототехника саласындағы ғылыми жетістіктер, орта мектепте робототехниканы оқыту ерекшеліктеріне қатысты қажетті еңбектер, интернет ресурстары.
Әдіснамалық негізі: ғылыми және арнайы әдебиеттерді талдау, мектепте білім беру робототехникасын зерттеу.
Зерттеудің жаңалығы :
- Орта мектепте робототехниканы оқыту ерекшеліктері анықталады;
- Анықталған ерекшелікке сәйкес робототехниканы оқыту әдістемесі құрылды.
Жұмыстың практикалық маңыздылығы: зерттеу нәтижесінде оқушылардың танымдық үдерістерді дамыту міндеттерін шешуге, ойлау формаларын дамытуға, жеке тұлға қасиеттерін дамытуға мүмкіндік аламыз.
Оқушыларды робототехника саласындағы зерттеулерге тарту, техникалық ақпаратпен және алғашқы инженерлік біліммен алмасу, жаңа ғылыми-техникалық идеяларды игеру оқу процесінде жаңа педагогикалық тәсілдерді қолдану және жаңа ақпаратты пайдалану арқылы жоғары сапалы білім алуға қажетті жағдай жасаймыз.
Дипломдық жұмыстың құрылымы: жұмыс кіріспеден, екі бөлімнен, қорытындыдан, пайдаланылған әдебиеттер тізімінен және қосымшадан тұрады.
Кіріспеде дипломдық жұмыстың тақырыбының өзектілігі, жұмыстың мақсаты, объектісі мен пәні, міндеттері, зерттеудің теориялық және әдіснамалық негіздері, жаңалығы, жұмыстың практикалық маңыздылығы баяндалған.
«Робототехника негіздері жайлы жалпы мағлұмат» деп аталатын бірінші бөлімде робототехникалық жүйелердің негіздері беріліп, робототехниканың даму тарихы мен әлемдік нарықтағы робототехника қарастырылады. «Жасанды интеллект» ұғымына түсініктеме беріліп, информатиканың өзекті мәселелерінің бірі - адамның ойлау қабілетін формальдандыру, ақпараттық технологияны интеллектендіру бағытындағы еңбектер сараланады.
«Орта мектепте робототехниканы оқыту ерекшеліктері» деп аталатын екінші бөлімде «Робототехника» пәнін оқытудағы педагогикалық тәсілдер мен принциптері, сонымен қатар, пәнаралық байланыс пен оқу моделі сипатталған. Робототехниканың тәрбиелік аспектісін оқу үдерісінде қолданудың артықшылықтары мен кемшіліктері, бастапқы деңгейде робототехниканы оқытудың аса маңызды мәдени мәні, робототехниканың дамытушы аспектісі құрылымдау және бағдарламалау оқушылардың танымдық үдерістерді (қабылдау, ойлау және сөйлеу, есте сақтау, қиялдау) дамыту міндеттерін шешуі, ойлау формаларын (талдау, жинақтау, салыстыру және т. б. ) дамытуы, жеке тұлға қасиеттерін (мінез-құлықты және амал-әрекеттерді, зияткерлікті, өзіндік ерекшелікті, шығармашылық әлеуетті) дамытуы жайлы баяндалады.
Қорытындыда зерттеу жұмысының ұсыныстары мен қорытындылары тұжырымдалған. Бұл бөлімде робототехника курсының бағдарламасы мұғалімдерге сабақты балаларға қызықты болатындай етіп жоспарлауға көмектесетіні, ал балалар болса бір-бірімен әріптесе жұмыс істеуге, бірлесе әрекет етуге, ұжымдық жұмысқа үйренетіні жайлы айтылады. Сабақ кезінде пайдаланылатын бағдарламалардың түсінікті екені де маңызды рөл ойнайды.
- РОБОТОТЕХНИКА НЕГІЗДЕРІ ЖАЙЛЫ ЖАЛПЫ МАҒЛҰМАТ
1. 1 Интелектуалды робототехника түсінігі
Робототехника ағылшын тілінен аударғанда «robotics»-роботика мағынасын беретін робот пен техника ұғымдары біріктірілген термин. Бұл қолданбалы ғылым электроника, механика, қашықтан басқару, информатика, сонымен қатар, радио және электротехника іспеттес пәндеріне негізделген.
«Робот» сөзі чех тілінен аударғанда өз еркіңнен тыс қызмет ету, құл мағынасын береді (robot, robota- өз еркіңнен тыс қызмет ету, rob-құл) . Бұл терминді Чехия елінің жазушысы, театр майталманы К. Чапек өзінің пьессасы үшін ойлап шығарған. Оның түсінігі бойынша роботтар - адамның барлық қызметтерін орындай алатын, олардың іс - қимылын қайталайтын, және дене бітімі адамға ұқсас автоматтандырылған темір машиналар [1] .
Робот адамның немесе жануарлардың барлық дерлік қызметтері мен іс-әрекеттерін толық немесе жартылай атқара алады. Бірінші роботтар адамның кейбір қозғалыстары мен сырт келбетін ғана қайталады. Олар көрермендердің көңілін көтеру үшін ғана пайдаланылды. Ал қазіргі уақытта адамның күнделікті тұрмыс - тіршілігінде көптеген қызметтерді атқаратын, мысалға, бақылаушы қызметін атқаратын, қарт адамдарға, мүгедектерге және сәбилерге көмек көрсететін, күтушісінің көңілін көтере алатын және тағы да басқа роботтар көптеп құрастырылуда. Сонымен қатар жоғары интеллектке ие роботтар да пайда бола бастады. Ендеше осы интеллектуалды жүйелерге негіз болған «жасанды интеллект» ұғымына тоқтала кетейік.
Жасанды интеллект-психология, физиология, лингвистика сынды басқа да ғылымдардың ортақ бір нүктелерінде тоғысқан, күрделі мәселелердің шешімімен айналысатын информатиканың бір бөлігі. Жасанды интеллект дегеніміз адамның ойын электронды есептеуіш машиналарында сипаттайтын бағдарламалық жүйе. Басқаша айтқанда, адамның логикалық ойлау қабілетін әртүрлі компьютерлерде бейнелеу, оларды дербес ойлай алатындай ету дегенге келеді. «Жасанды интеллект» терминін ең бірінші Дартмут университетінде мың тоғыз жүз елу алтыншы жылы өткен конференцияның преамбуласында Джон Маккарти енгізген болатын. Бұл ғалымның пікіріне сәйкес «жасанды интеллектті» ғалымдар нақты мәселені шешу үшін адамдарда байқалмайтын интеллектті зерттеуіне болады. Яғни, информатиканың өзекті мәселелерінің бірі - адамның ойлау қабілетін формальдандыру, ақпараттық технологияны интеллектендіру (интеллект -ой, ақыл, сана) бағытындағы ілімді - жасанды интеллект деп атайды [2] . Жасанды интеллект адамның кейбір интеллектуалды ойлау қабілетін электронды есептеуіш машиналарында модельдеу, бағдарламалау, немесе, адам орындайтын іс-әрекеттерді орындау тәрізді мәселелермен айналысады.
Жоғарыда айтып өткендей, интеллект сөзі латынның «іntellectus» - ақыл-ой, ес, адамның ойлау қабілеті деген мағынаны береді. Интеллект туралы білім 3 бағыт бойынша дамып келеді:
1. Шығармашылық бағыт. Бұл бағыт машиналық «есептер шешуші» және эвристикалық іздеу теориясымен байланысты.
2. Адам қойған тривиалды емес міндеттерін шешетін роботтарды жасаумен, сонымен қатар, нақты ортада автономды жұмыс істейтін, яғни, өндірістік роботтармен байланысты.
3. Логикалық қорытынды жасап, жоғарғы деңгейлі бағдарламалы технологиялық құралмен толықтандыру арқылы электронды есептеуіш машиналарын түбегелі байланысты басты бағыт. [3] .
Роботтың қызметін тереңірек түсіну үшін, адамның сәйкес қызметтерімен салыстыру қажет. Олар:
1-жасанды иіс сезімі;
2-жасанды ақыл - ой;
3- техникалық көрініс;
4- сөйлеуді талдауыш, яғни анализатор;
5- сөйлеу синтезаторы;
6- адымдағыш аппарат түрінде жасалған жасанды аяқ-қол;
7- жасанды қол;
8- манипулятор қызметін атқаратын механикалық қол.
Сонымен, робот дегеніміз - жалпы, адамның функциясын атқаратын, ЭЕМ арқылы басқарылатын машина [4] . Қазіргі уақытта роботтар біздің өмірімізде көптеп қолданылып жүр. Мәселен, банкомат ақшаны сізге автоматты түрде өзі санап береді. Парктегі ойын атракциондарына отырсаңыз, зымыранмен ұшып бара жатқандай әсерде болуыңыз ықтимал. Яғни, бұдан шығатын түйін, робототехника - автоматтандырылған техникалық жүйелерді құрастырумен айналысатын ғылымның бір түрі. Роботтотехника ғылымының зерттеу объектісі робот болып табылады. Робот - бұл индустрия. Роботтарды құрастыру және роботтарды қолдану аса ірі сала болып табылады. Роботты техника екіге бөлінеді: өндірістік және арнайы [5] .
Өнеркәсіптік робот дегеніміз ойлай алмайтын қозғалмалы автоматикалық машина, ол бірнеше іс - әрекет жасау функциясы бар манипулятор түріндегі атқару құрылғысынан және өндірістік үдерісте қозғалу және басқару қызметін орындауға арналған қайта программаланатын құрылғыдан тұрады. Робототехниканың дамуы барысында адамдарды бір сарынды ауыр жұмыстардан, жоғары радиациялы, жоғары немесе төмен температура жағдайларындағы және адам қатынауы қиын жерлердегі (су астында, ғарышта) жұмыстардан босататын автоматтық құрылғылар мен механизмдер түрінде жасалып, олар үнемі жетілдіріле түсуде. Мұндай құрылғылар мен механизмдер өнеркәсіптік роботтар деп аталады. Өнеркәсіптік роботтар - өндіріс процесінде адамның қозғалу және басқару сияқты іс-әрекеттерін (өндіріс заттарының орнын ауыстыру т. с. с. ) және технологиялық құралдардың (айла-тетіктердің) қызметтерін орындайтын автоматтық машина. Адамның қатысуынсыз бір немесе бірнеше технологиялық операцияны, өңделетін бұйымды тиеу мен түсіруді қоса алғанда автоматты түрде орындайтын технологиялық өңдеуші машиналардың, өндірістік машиналардың, тасымалдау және көмекші жабдықтардың жиынтығын робот-техникалық кешен деп атайды [6] . Робот-техникалық кешеннің, әдетте, электрондық есептеу машинасы (ЭЕМ) немесе микроконтроллер негізіндегі бағдарламалық басқару жүйесі болады. Робот - техникалық кешен ― адамсыз технологияны енгізудің негізі болып табылатын икемді өндіріс жүйелерінің бастапқы буыны болып табылады. Робот - техникалық кешенді пайдалану жұмыс күшінің тапшылығы жағдайында өте маңызды. «Робот» сөзі қандай мағына береді, қандай мүмкіншіліктер туғызады деген сауалға әр адамның өз дүниетанымдық көзқарасы болады. Бірақ, қанша әр түрлі ойлар мен ұсыныстар болғанымен, олардың мағынасы бірдей: «Робот дегеніміз - адам қолымен құрастырылған, программаланған, автоматтандырылған, саты бойынша жетілдірілген ақылды механизм» [7] . Автоматтандыру арқылы роботты ақылды етіп жасауға ғалымдар әлі де еңбек етіп жүр, ол көп ізденістер мен практикалық еңбектің нәтижесінде болады. Адамзаттың табиғаттағы қолайсыз жағдайларда іс-әрекет етуі, шахталардағы, космоста, химиялық заттар қатысымен болатын жағдайларда және тағы да басқа апатты да қауіп-қатері жоғары дәрежелі орындарда жұмыс істеуі өте қауіпті. Сондықтан осындай шартты жерлерде «робот» барлық жұмыстарды адамның орнына дәлме-дәл орындаса адам баласының өміріне, денсаулығына қауіп төнбейді. Сонымен қатар шығармашылық кәсіпорындарында «робот» қолданылса, уақыт шығыны, адамның физикалық жұмысы, оның шаршауы да азаяр еді. Мысалы, қандай да бір шикізат өнімін немесе белгілі бір затты басып шығаруға робот өте қолайлы [8] .
1. 2 Робототехниканың даму тарихы
Роботтың алғашқы қарапайым үлгілері ерте кезде-ақ жасалған болатын Мысалы, автоойыншықтар бірінші ғасырда, жүретін сағат үшінші ғасырда, өз бетімен суда жүзетін кеме сегізінші ғасырда дайындалған. Қазіргі кезде түрлі бұйымдарды қалаған жерге жылжыту, не металды пісіру, үй, сауда және ауыл-шарушылық жұмыстарын орындау, медицинада хирург қызметін атқару сияқты күрделі іс-әрекеттерді орындайтын роботтар жеткілікті. Робот космонавт түрінде де пайдалануда. Көптеген мәліметтерді шешу мақсатында соңғы роботтарға түрлі программалар жиынтығы жинастырылған бір немесе бірнеше компьютер енгізіліп қойылған. Роботтың келешекте дамуы микропроцессорлық техниканың одан әрі дамуына байланысты. Бұл бағыттағы ілім робототехника делінеді. Ол жасанды интеллекттің әдістері мен идеяларына тығыз байланысты [9] .
Ал ең алғаш «робот» сөзін чех жазушы-сатиригі Карл Чапек ағасы Йозфпен бірлесіп өзінің «R. U. R» (Rossum’s Universal Robots) пьессасы үшін ойлап тапқан [10] . Ол пьесса мың тоғыз жүз он жетінші жылы жазып, мың тоғыз жүз жиырма бірінші жылы жарыққа шығады. Бір қызығы, пьессада адам тәріздес машинаның адамдарға қарсы көтерілісі суреттеледі. Сюжет бойынша, роботтардың негізгі мақсаты өз түрін, яғни өзі сияқты роботтарды қалыптастыруға арналған өндіріспен айналысып, көбею. Олар жер шарын жаулап алып, адамдар жасайтын барлық қызмет түрлерін өздері жасай бастайды, нәтижесінде адамзат баласының жағдайы нашарлай бастайды. Сол кезде роботтар көтерілісті бастайды. Карелдің идеясы замандастарының ақыл-парасатын қозғағаны соншалық, бірінші пьессаның қойылымынан кейін Лондонда жазушы бір мезетте атақты болып шыға келеді [11] .
Робототехника туралы танымал мақалаларда кездесетін екінші нәрсе, ол - жалған қызмет көрсеткен темір Гефеста құдайының қызметшісі, орта ғасырлық гоммуникулист ал химиктер, ежелгі европалық Голема мифі және соңғысы «Франштейин немесе Қазіргі заманғы Прометей» Мери Келли. Келесісі-ортағасырлық механикалық қуыршақтар туралы көптеген тамаша әңгімелер. Бағдарлама рентінде оларға жұдырықты механизмді немесе қатарласып орналасқан барабанды қолданды. Шамамен 1736-1738 жылдары инженер, математик және музыкант Жак де Вокансон флейтте ойнай алатын қуыршағына бағдарлама ретінде жұдырықты механизмді немесе қатарласып орналасқан барабанды қолданды. Ол қуыршақ флейтте он екі түрлі әуен орындай алды және де, саусақтарын шынайы қимылдатып, еріндерін жыбырлата отырып флейт тесіктерінен кәдімгі ауа шығаратын. Ж Вокансон сонымен қатар, жүре алатын, қанаттарын қимылдата отырып, дыбыс шығара алатын, су ішетін, дәндерді шоқитын және оларды ішкі диірменімен ұсақтай алатын үйректі жасап шығарды (1741 ж) . Үйрек 1000-ға жуық бөлшектерден тұрды және сол заманда жасалған роботтардың үздігі деп танылды (1-сурет) [12] . Өкінішке орай, Париж ғылым академиясының академигі, ұлы инженер-механиктің бір де бір жұмысы біздің заманымызға дейін жетпеген.
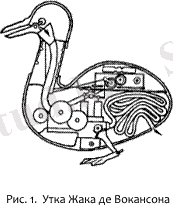
1 - сурет. Жак де Вокансонның үйрегі
Барлық осы кереметтерін құру үшін Вокансонға анатомиядан алған білімдері көмектесті. Алайда, көп ұзамай олар оған қызықсыз болып, 1743 жылы Вакансон барлығын сатып жіберді. Болашақ ұлы француз революциенері болып танылған адамның бірде-бір жұмысы біздің күнге дейін жеткен жоқ.
Машина мен механизмнің құрылысының үлкен жетістігі деп динамиканың негізгі заңдарының бірінің ашылғанын айтуға болды. 1743 жылы Жан Лерон Д´Аламбер бұл заңды сәтті статистикада қолданатын, күштер тепе - теңдігі динамикасының идеясын, қағидасын пайдаланып ұзартуға болады деген тұжырым жасады. Жүйені статистикалық тепе - теңдікке алып келу үшін барлық объекттің дұрыс жағдайда орналасуын табуымыз тиіс. Динамикалық тепе-теңдік үшін (жүйенің кейбір бөлігі, мысалы, қозғалыс құрып айналуға, қолданбалы күштерді теңестіріп қосу мүмкіндігі) 2-3 ұстанымды немесе жылдамдықты ғана емес, бірден барлық қалыптың функцияларын бір уақытта дереу табу керек. Ол үшін Д´Аламбер активті күштерге инерция күшін қосты [13] .
Ал, 1829 жылы Карл Фридрих Гаусс «шектеуші принцип» деп атаған ортағырақ және қолдану барысында ыңғайлы механиканың тағы бір принципін ұсынды. Гаусс ұсынған принцип, басқа да барлық қозғалыс жүйесін нақты қозғалыс жүйесінен ажыратуға және белгілі бір жағдайда ажыратуға мүмкіндік береді. Сөз жүзінде ол былайша баяндалады: «Нүкте арқылы байланысқан жүйе қозғалысы шын мәнінде шектеу бағытында жүріп жатыр, яғни еркін қозғалыстан ауытқушылық айтарлықтай аз болатын болса, жүктелген қатынастар ешқашанда болмас еді».
Бұл қағида манипуляторлы басқару жүйесінде өте кеңінен қолданылады. Алғашқы бағдарламаланатын манипулятор машиналар АҚШ-та 1930 жылы пайда болады. Осындай манипуляторлардың алғашқы авторларының бірі Генри Форд (1863-1947) оларды құрастыру үшін серпін автоматтандырылған өндірістік желісін немесе конвейерлерді қолданды (1913) [14] .
... жалғасыСіз бұл жұмысты біздің қосымшамыз арқылы толығымен тегін көре аласыз.
- Іс жүргізу
- Автоматтандыру, Техника
- Алғашқы әскери дайындық
- Астрономия
- Ауыл шаруашылығы
- Банк ісі
- Бизнесті бағалау
- Биология
- Бухгалтерлік іс
- Валеология
- Ветеринария
- География
- Геология, Геофизика, Геодезия
- Дін
- Ет, сүт, шарап өнімдері
- Жалпы тарих
- Жер кадастрі, Жылжымайтын мүлік
- Журналистика
- Информатика
- Кеден ісі
- Маркетинг
- Математика, Геометрия
- Медицина
- Мемлекеттік басқару
- Менеджмент
- Мұнай, Газ
- Мұрағат ісі
- Мәдениеттану
- ОБЖ (Основы безопасности жизнедеятельности)
- Педагогика
- Полиграфия
- Психология
- Салық
- Саясаттану
- Сақтандыру
- Сертификаттау, стандарттау
- Социология, Демография
- Спорт
- Статистика
- Тілтану, Филология
- Тарихи тұлғалар
- Тау-кен ісі
- Транспорт
- Туризм
- Физика
- Философия
- Халықаралық қатынастар
- Химия
- Экология, Қоршаған ортаны қорғау
- Экономика
- Экономикалық география
- Электротехника
- Қазақстан тарихы
- Қаржы
- Құрылыс
- Құқық, Криминалистика
- Әдебиет
- Өнер, музыка
- Өнеркәсіп, Өндіріс
Қазақ тілінде жазылған рефераттар, курстық жұмыстар, дипломдық жұмыстар бойынша біздің қор #1 болып табылады.

Ақпарат
Қосымша
Email: info@stud.kz