Интеллектуалды манипулятор РОБОҚОЛ: жобалау, құрастыру және Arduino негізіндегі басқару

С. Сейфуллин атындағы №4 ақпараттық технология мектеп-лицей (IT-мектеп-лицей) коммуналдық мемлекеттік мекемесі
ҒЫЛЫМИ ЖОБА
Тақырыбы: Интеллектуалды манипулятор «РОБОҚОЛ»
Секция: Робототехника
Орындаған : «С. Сейфуллин атындағы №4 ақпараттық технология
мектеп-лицей (IT-мектеп-лицей) коммуналдық мемлекеттік мекемесінің 8 А сынып оқушысы Ахметова Томирис Мейрамбекқызы
Жетекшісі: Омарбекова Салтанат Кунтугановна
Информатика пәні мұғалімі
Ғылыми жетекшісі: Дәуренбеков Қуаныш Қойшығұлұлы
Болашақ университетінің ректоры,
техника ғылымдарының кандидаты
Қызылорда қаласы, 2021 жыл
МАЗМҰНЫ
І. Кіріспе . . . 4 бет.
ІІ Негізгі бөлім . . . 5 бет
1. Робототехника тарихы . . . 5 бет
2. Роботтардың ең басты топтары . . . 5 бет
3. Манипуляция . . . 7 бет
4. Манипулятор құрастыру . . . 8 бет
5. Arduino манипуляторының принциптік схемасы . . . 9 бет
6. Сервожетек құрамы . . . 10 бет
7. Қорытынды . . . 17 бет
8. Пайдаланылған әдебиеттер . . . 18 бет
Аннотация
Бүгінгі біздің ғылыми жоба тақырыбының желісі және мақсаты б ағдарлама робототехника және типтiлiктiң қағидаларының техникалық құралдарын жүйелiк талдаудың негiзiнде орындалады. Қағиданың мәнi типтілік сызбаларды қарастырып, барлық түрлерді зерттеу орнына жинақты, сипатты белгiлердi өте орнықты ашатын типтi сұлбаларды қарастыруға апарады.
Бағдарлама негізі болып дайын интеллектуалды механизмдерді үлгілеу оқушылардың прогрессивтік, көрнекті және бір уақытта робототехниканың пайдалы бөлімінінің өтпелі жетістіктерін қамтиды.
Робототехника жүйелерінің жетекшi топтарының негiзгі жұмысына жататын маңызды теориялық жағдайлар бiр мезгiлде қарастырылады. Мұндай тәсiл тез құбылмалы жағдайларда робототехниканың заңдылықтарының саналы және шығармашылық меңгерілуін, белсендi жаттығу және конструкциялық-тәжiрибелiкте өнiмдi қолдануға мүмкiндiк береді.
Теория жағын қызығып оқушыларға да, дербес құрастыруға және түрлi роботтардың үлгілеу үшiн де бағдарлама мазмұны экспериментальды тексеру үрдiсімен дайындалады.
Жаңашылдығы мен өзектілігі:
Робототехника және мехатроника еліміздегі ең сирек кездесетін мамандықтың түрі. Елбасымыздың жолдауындағы XXI ғасырдың он жаһандық сын қатерлерінің бірі адамзат Үшінші индустриялық революция табалдырығында тұр.
Цифрлық және нанотехнология, робототехника, регенеративтік медицина және басқа да көптеген ғылыми жетістіктер қоршаған ортаны ғана емес, адамның өзін трансформациялап, күнделікті ақиқатқа айналады. «Біз осынау үдерістердің белсенді қатысушылары болуға тиіспіз» деген сөзі әркімді ойландыратыны анық.
Ұсынылған пікірлердің жүзеге асырылуы жас мамандар мен оқушылар арасында
Интеллектуалды манипулятор «РОБОҚОЛ» - дың адамға қажетті техникалық өндірісте және қарапайым өмірде қолданылатынын сеніммен айтуға болады.
Тақырыбы: Интеллектуалды манипулятор «РОБОҚОЛ»
Зерттеу тақырыбының өзектілігі.
Әр жыл сайын дүние жүзінде робототехника облысының ғалымдары адамзат өміріне алуан түрлі жаңалықтар енгізуде. Сол эксперт ғалымдардың пікірінше робототехниканың ең өзекті мәселелерінің бірі жылжымалы мобильді робот құрастыру және оның тиімді алгоритмдері.
Робототехника негіздері үш үлкен ғылыми техникалық зерттеу аймақтарымен қалыптасқан.
*механикалық инженерия;
*электрлік инженерия;
*компьютерлік ғылым.
Дәлірек айтқанда механикалық инженерия - динамика, материалдар, үлгілеу, машиналардың элементтері, компьютерлік үлгілеу, құрал-саймандарды шығару жұмыстарымен айналысса, электрлік инженерия - электрлік схемалар, күш электроникасы, датчиктер және олардың орындалу механизмдері, байланыс хаттамалары, басып шығару схемаларын үлгілеумен жұмыс жасайды. Ал компьютерлік ғылым бағдарламалау тілдерімен (C, C++, Java, Ассемблер), микроконтроллер, микрокомпьютерлер, басқарудың кіріктірме жүйелері, есептеулер яғни жасанды интеллект, бейнелерді танып білу, компьютерлік көзқарастармен айналысатын бөлім.
Сонымен қатар робототехника және мехатроника еліміздегі ең сирек кездесетін мамандықтың түрі. Елбасымыздың жолдауындағы XXI ғасырдың он жаһандық сын қатерлерінің бірі адамзат Үшінші индустриялық революция табалдырығында тұр.
Цифрлық және нанотехнология, робототехника, регенеративтік медицина және басқа да көптеген ғылыми жетістіктер қоршаған ортаны ғана емес, адамның өзін трансформациялап, күнделікті ақиқатқа айналады. «Біз осынау үдерістердің белсенді қатысушылары болуға тиіспіз» деген сөзі әркімді ойландыратыны анық. Осындай мақсатта елімізде ғана емес дүние жүзі халқы ертеңгі өмірдегі болатын барлық мәселелерді шешу үшін қазіргі таңда мықты ғалымдар мен инженерлерге зәру болып отыр. Сондықтан да елімізді жаңа сатыға көтеріп, жаңалық ашатын болашақ мықты кадрлар даярлау, бүгінгі мектеп қабырғасынан бастау қажет. Сол себепті робототехника курсы мектеп бағдарламасына енгізіліп, осы саланың ең бастапқы түсініктерін қалыптастыру үшін арнайы зертханалар алынуы тиіс. Осындай зертханалардың бірі Lego компаниясымен шығарған Lego Mindstorms nxt зертханасы және де студенттер үшін кәсіптік зертхананың бірі -VEX. Дегенменде білім беру үшін біріншіден оқу бағдарламасы әзірлену қажет, елімізде қазақ және орыс тілдерінде оқулықтар шығарылу керек.
Мақсаты:
*өзіндік оқыту және өзіндік даму үрдісіне белсенді қосылу;
*оқу бағдарламасынан тыс білімдерді меңгеру;
*ғылыми зерттеу және құрастырудың әдістерін үйрету
*шығармашылық топта коммуникативті жұмыс дағдыларын қалыптастыру;
*болашақ мамандық таңдауда өзіндік анықтау.
Міндеттері:
*сабақта алған білімді оқушылардың өзіндік жұмыстарында қолдана алу дағдыларын жетілдіру;
*қызылушылық, білім деңгейін және эрудицияны жоғарылату; оқушылардың отандық және шетел ғылымының жетістігі аумағындағы ой-өрісін ұлғайту;
*мектеп оқушыларының өзіндік білім алуына және өзіндік дамуына белсенді қатысу;
*зертеудегі ізденушілікті арттыру;
*зерттеушілік ептілікті, құрастырудың практикалық дағдыларын қалыптастыру;
*жоба және зерттеу жұмыстары үрдісіндегі балалар шығармашылық топтарын қалыптастыру;
*құрастыру аумағындағы ең дарынды оқушыларды анықтау;
*оқушылардың кәсіптік бейімделуі.
І. Кіріспе.
Роботтар - қарқынды дамып келе жатқан болашақтың жоғарғы технологияларының бірі.
Қазіргі кезде роботтар өміріміздің көптеген саласына, атап айтқанда, ғарышты игеру, денсаулық сақтау, өндіріс, қоғамдық қауіпсіздікті қамтамасыз ету, қорғаныс ісі және басқа да салаларға еніп үлгерді.
Робот (чех тілінен аударғанда robota - еріксіз еңбек , rob - құл ) - тірі организм ретінде құрылған автоматты құрылғы. Ол байланысатын және әрекет ете алатын, ойлай білетін, қабылдай алатын машина.
Робот қоршаған әлеммен әрекеттескен кезде адамның (жануарлардың) қызметтері мен іс-әрекеттерін ішінара немесе толық атқарады. Алғашқы роботтар адамның қозғалысы мен сырт пішінін қайталады. Олар ойын-сауық мақсаттарында пайдаланылды. Қазіргі кезде тұрмыстағы көптеген қызметтерді атқаратын, қадағалайтын, мүгедектер мен сәбилерге көмекші, көңілін аулайтын, т. б. роботтар жасалынды, интеллектуалдық роботтар да пайда бола бастады. Робот техниканың дамуы барысында адамдарды бір сарынды ауыр жұмыстардан, жоғары радиациялы, жоғары немесе төмен температура жағдайларындағы және адам қатынауы қиын жерлердегі (су астында, ғарышта) жұмыстардан босататын автоматтық құрылғылар мен механизмдер түрінде жасалып, олар үнемі жетілдіріле түсуде. Мұндай құрылғылар мен механизмдер өнеркәсіптік роботтар деп аталады. Өнеркәсіптік роботтар - өндіріс процесінде адамның қозғалу және басқару сияқты іс-әрекеттерін (өндіріс заттарының орнын ауыстыру т. с. с. ) және технологиялық құралдардың (айла-тетіктердің) қызметтерін орындайтын автоматтық машина. Адамның қатысуынсыз бір немесе бірнеше технологиялық операцияны, өңделетін бұйымды тиеу мен түсіруді қоса алғанда автоматты түрде орындайтын технологиялық өңдеуші машиналардың, өндірістік машиналардың, тасымалдау және көмекші жабдықтардың жиынтығын робот-техникалық кешен деп атайды. Робот-техникалық кешеннің, әдетте, электрондық есептеу машинасы (ЭЕМ) немесе микроконтроллер негізіндегі бағдарламалық басқару жүйесі болады. Робот-техникалық кешен “адамсыз технологияны” енгізудің негізі болып табылатын икемді өндіріс жүйелерінің бастапқы буыны болып табылады. Робот-техникалық кешенді пайдалану жұмыс күшінің тапшылығы жағдайында өте маңызды.
Бағдарламалық басқару - басқару жүйесінің ең қарапайым түрі, манипуляторларды басқару үшін өнеркәсіп нысандарында қолданылады. Мұндай роботтардың датчиктік бөлігі болмайды, барлық әрекеттері тұрақты және үнемі қайталанады.
ІІ. Негізгі бөлім.
1. Робототехника тарихы
1942 жылы ғылыми-фантастикалық мәнерде жазатын жазушы Айзек Азимов робототехниканың үш заңын ойлап табады. 1948 жылы Норберт Винер тәжірибелік робототехниканың негізін құрайтын кибернетиканың қағидаларын тұжырымдаған. Толығымен автономды роботтар XX ғасырдың екінші жартысында ғана пайда болды. Ең бірінші сандық басқаруы бар бағдарламанатын робот Unimate болған. Ол робот ыстық темір бөлшектерді балқыту машинасынан көтеріп, жинауға арналған. Қазіргі таңда коммерциялық және индустриалдық роботтар кеңінен тараған. Ол роботтар адамдарға қарағанда жұмысты арзанырақ, жинақы және нық орындайды. Сол салада қолданылатын роботтардың кейбір жұмыстары адам үшін лас, қауіпті және жалықтыратын болып табылады. Роботтар кеңінен құрастыру, жинақтау, жеткізу, жер және ғарыш зерттеулері үшін, медициналық оталар, жарақ ретінде, зертханалық зерттеулер, қауіпсіздік үшін қолданылады
2. Роботтардың ең басты топтары
Қазіргі кезде роботтардың көптеген түрлері бар, әртүрлі орталарда әртүрлі жолмен қолданылады. Қолдану мақсаты мен сыртқы келбеті әртүрлі болғанымен, құрылымына келгенде баршасында 3 бірдей жерлері бар:
- Әр робот механикалық негізі - құрылғы, рамадан тұрады. Сол раманың түрі қолданылатын мақсатына қарай өзгереді. Мысалы, робот лай мен құмның үстімен жүретін болса, шынжыр тракторлар қолданылуы мүмкін. Механикалық жағы ойлап табушының бір бөлек мәселенің шешімі, робот жүретін жердің қоршаған ортасына байланысты.
- Роботтың формасы атқаратын функциясымен тікелей байланысты.
- Әр робот электрбөлшектерден тұрады. Солбөлшектер робот жүйелерін толығымен бақылайды. Мысал ретінде шынжыр арқылы жүретін роботы алсақ, сол шынжырларды жүргізу үшін күш керек. Сол күш электр қуаты ретінде келіп, сымдар арқылы өтіп, батареяда сақталады; осы негізгі схема. Газбен істейтін машиналар да газды қолдану үдерісі үшін токты керек етеді. Сол себептен, газбен жүретін көлік сынды машиналарда да батареялар бар. Электр жүйесі роботтың қозғалуында (мотор) қолданылады, өлшеу шін (электрсигналдаржылу, дауыс, тұрғанжері мен энергия мөлшерін анықтау үшін) және жалпы қолдану үшін (робот жалпы негізгі операцияларды жасау үшін өз мотор мен сенсорларына біраз энергия жолдауы керек) .
- Барлық роботтар кішкене болса да компьютер кодын керек етеді. Сол алгоритмде робот қалай жұмыс істейтіні көрсетіледі. Код жазған адам программаның ішінде робот шешімін қалай және қашан қабылдап, әрекет ететінін жазады.
Сол шынжыр арқылы жүретін робот өзінің механикалық дизайны мен құрылысының арқасында лайды керемет етіп, өзінің батареясынан сымдар арқылы керек мөлшерде энергия алса да, компьютер программасынсыз орнынан жылжымайды; өйткені программа роботқа қашан, қайда жылжу керек екендігін айтады. Программа роботтың негізгі мәнін құрады. Роботтың механикалық және электр бөлшектері керемет әрленіп, бірақ жазылған программасына шар болса, роботтың жұмыс істеуі, қозғалуы мен жұмыс істеуі ретсіз болады. Негізгі үш түрлі алгоритмдер бар: қашықтан басқару, жасанды интеллект және гибрид. Қашықтан басқарылатын роботтарда бұйрықтар жиынтығы бар. Ол бұйрықтарды тек қашықтан басқаратын құрылғының сигналын алғаннан кейін ғана орындайды. Жалпы айтқанда, адам сол құрылғы арқылы бірқашықтықта орналасқан роботы басқарады. Жасанды интеллект қолданылатын роботтар қоршаған ортаға байланысты шешімдерді өздері қабылдайды. Роботтың жүйесіне қоршаған ортаның факторларына, объектілеріне әртүрлі реакция жазылған. Жасанды интеллект сол реакцияларды ескере тұрып, қоршаған ортаның факторларына өзі әсер береді. Негізінен, жасанды интеллект адамның ойлау қабілетіне ұқсас болуы керек, немесе ұқсастыруды көздейді. Ал гибрид қашықтан басқару мен жасанды интеллектілердің біріккен кезі.
3. Манипуляция
Роботтарға белгілі бір затты көтеріп, орнын ауыстыру, өзгерту, сындыру немесе одан басқа әрекет жасау керек. Роботтардың қолдарын робототехника саласында ағылшынша end effectors деп атайды. Робот қолдарының соңы, нақты айтқанда затты ұстайтын бөлігі ауыстырмалы болады. Әр бір түрі нақты бір жұмыс түріне арналған. Алайда, кейбір роботтарда соңы тұрақты болады, ол кезде аустырылмай бір ғана түрлі қысқышпен жұмыс жасайды, кейбіреулерінде гуманоид роботтың қолы сынды (адам қолы сынды) тұрақты, бірақ жұмыстың бірнеше түрін атқара алатын болады.
Вакууымдық қысқыштардың жасалуы қарапайым болғанымен, олар ауыр заттарды көтеру қабілетіне ие. Көтеретін заттын сырты тегіс болса болғаны, насостар арқылы ауыны сорып алып, заттарды көтереді. Электронды бөлшектер мен көлік жел әйнегі сынды үлкен ауыр заттарды көтеруге арналған роботтар қысқыштар ретінде көбінесе қарапайым вакууымдық қысқыштарды қолданады.
Біраз озат роботтар толығымен адам қолы ұқсас Shadow Hand, MANUS, and the Schunk сынды қысқыштарды қолдануды бастады. Сол қолдар өте епті, оған қоса сол қысқыштарда 20 шақты DOF (degrees of freedom - жылжу бостандығы) мен жүздеген тактильді сенсорлары бар.
Біз бұл роботталған Arduino манипуляторын қалай жасау тәсілін үйренеміз. Arduino манипуляторын Android үшін арналған бағдарламамен сымсыз байланыс арқылы басқаруға және бағдарламалауға болады. Мен сіздерге робот бөлшектерін жобалауынан бастап, 3d-баспасын шығаруын, электронды компоненттерін қосуын, Arduino бағдарламалауын, және де Arduino манипуляторын басқаратын жеке қосымшанын әзірлеуіне дейін жасап көрсетемін.
Қолданбадағы жүгірткелерді пайдалана отырып, әрбір сервожетекті немесе роботтың манипуляторлық осінің қозғалысын қолмен басқара аламыз. Сондай-ақ, "Сақтау" батырма арқылы біз әрбір позицияны немесе қадамды жаза аламыз. Содан кейін робот-манипулятор автоматты түрде іске қосылып, осы қадамдарды қайталай алады. Сол батырмамен біз автоматты операцияны тоқтата аламыз, немесе жаңадан жазу үшін барлық қадамдарды өшіріп әлде жоя аламыз. Алғашқы 3 осьті - белдер, иықтар мен шынтақ үшін мен MG996R сервожетегілерін, ал басқа 2 осьті-рулон және білек қадамына SG90 шағын сервожетегілерін қолдандым.
Бұл жерде мен өз алғысымды осы ғажайып 3D-принтерді ұсынғаны үшін Banggood. com-ға айтқым келеді. Reality CR-10 баспасының сапасы бағасымен таң қалдырады және оны ерекшеліндіретін жағдай, ол 90% жиналған түрінде жеткізіледі.
Құрастыруды аяқтау үшін, біз раманың жоғарғы және төменгі бөліктерін кейбір болттардың және кронштейндердің көмегімен жалғаймыз, содан кейін элекрондық компоненттерді басқару блогымен қоса берілген кабельдерімен жалғайымыз. Сынап көрмес бұрын, ролик доңғалақтарының тартылуы мен бекітілуі жеткіліктігін тексеру ұсынылады, ал жоқ болса, сіз эксцентрик гайкаларын пайдалана отырыптартып бекітіледі. Соңынан 3D баспасын түзетіп болған соң, сіз 3D-туындыларды шындыққа айналдыра аламыз.
4. Манипулятор құрастыру
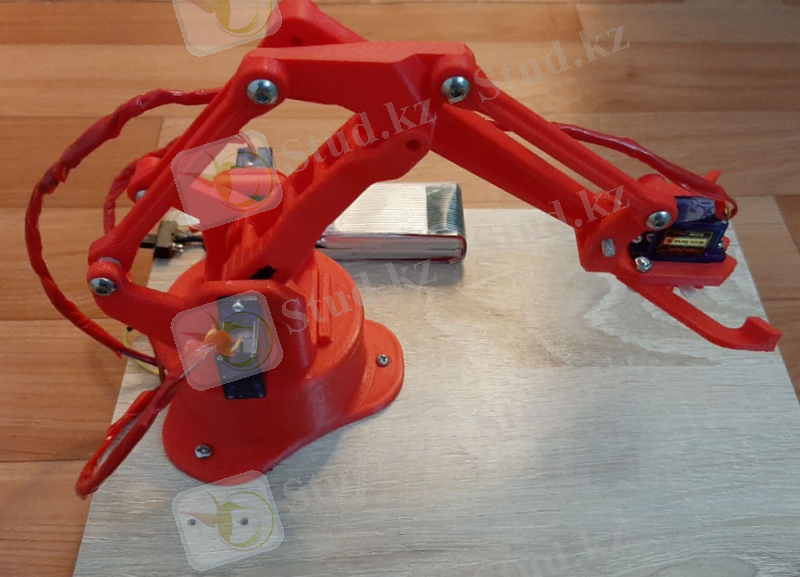
Сонымен, қазіргі уақытта біз роботтың қолын жинауға дайынбыз. Мен оның жиынтығына кіретін бұрамаларды пайдалана отырып, бірінші сервоқозғалтқышты бекіттім. Содан кейін сервомеханизм шығу білігінде дөңгелек мүйізді болтпен бекіттім.
Жоғарғы бөлігін орналастырып, оны екі бұрандамен бекіттім.
Мұнда басында қайтадан сервожетек жүреді, ал келесі бөлшекте дөңгелек мүйіз, содан кейін олар болттың көмегімен шығу білігінде бір-біріне бекітіледі.
Мұнда иық осінде қандай да бір серіппені қосу орынды екенін байқай аламыз. Сервожетекке көмектесу үшін резеңке таспаны қолдандым, себебі бұл сервожетек пайдалы жүктеме ретінде қолдың барлық салмағын көтереді.
Сол жолмен мен роботтың қалған бөлігін жинауды жалғастырдым. Басып алу механизміне келетін болсақ, мен оны құрастыру үшін 4 миллиметрлік бұрандамалар мен гайкаларды қолдандым.
Ақырында мен соңғы сервоприводқа басып алу механизмін бекіттім. Осылай аrduino роботының қолы дайын болды.
5. Arduino манипуляторының принциптік схемасы
Келесі кезең-электрониканы қосу. Бұл жобаның принципті схемасы шын мәнінде өте қарапайым. Бізге смартфонмен байланыс үшін плата Arduino мен Bluetooth HC-05 модулі қажет. Алты сервотезегіштің басқару контактілері алты сандық плато Arduino контактілер қосылған.
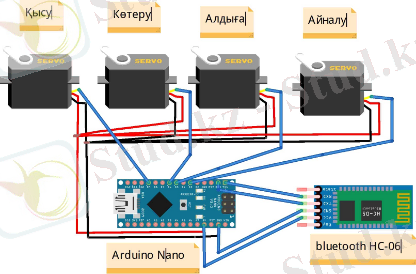
Сервожетек кез келген механиқалық жетектің типі болып табылады(жұмыс болігің құрылғылары) . Оның құрамында датчигі (жағдайы, жылдамдығы, күші және т. б. ) және жетекті басқару блогы (электрондық схема немесе механикалық тарту жүйесі) бар, берілген сыртқы мәніне (басқару тұтқасының жағдайы немесе басқа жүйелерден сандық мәні) сәйкес датчиктегі ( құрылғыға сәйкес) автоматты түрде қолдайтын қажетті параметрлері.
6. Сервожетек құрамы
Жетек-мысалы, редуктор бар электр моторы немесе пневмоцилиндр,
Кері байланыс датчигі - мысалы, редуктор білігінің бұрылу бұрышының датчигі (энкодер) . Қуат және басқару блогы (ол жиілік түрлендіргіші / сервоусилитель / инвертор / servodrive) . Кіріс / конвертер/басқару белгінің/ әсерінің датчигі (басқару блогының құрамында болуы мүмкін) .
Қысқаша айтқанда, сервопривод "автоматты дәл орындаушы" болып табылады. Ол кірісінде басқару параметрінің мәнін ала отырып (нақты уақыт режимінде), ол "өз күшімен" (негізге датчик көрсеткіштері арқылы) бұл мәнін атқарушы элемент шығуында сақтайды. Сервоприводтарға теріс кері байланыстағы әртүрлі реттеуіштер мен күшейткіштер жатады, мысалы, гидро-, электро-, пневмокүшейткіштердің қол жетегінің басқару элементтері (атап айтқанда, тракторлар мен автомобильдердегі рульдік басқару және тежегіш жүйесі), алайда "сервотежегі" термині көбінесе (және осы мақалада) басқару элементтері мен жұмыс органдарының жетегі үшін автоматты жүйелерде қолданылатын кері байланысы бар электр жетегін белгілеу үшін қолданылады. Сервожетектерді қуаттандыру үшін бізге 5В қажет, бірақ бұл сыртқы қуат көзі болуы керек, өйткені Arduino олардың барлығы тұтынатын ток шамасын ала алмайды. Қуат көзі 2А-ден кем емес керек . Сондықтан, бәрін бірге байланыстыра отырып Arduino бағдарламалауға және Android үшін бағдарлама жасауға мүмкіншілік ашылады.
Arduino Robot Arm Code
Arduino Uno-ATmega328 (datasheet) микроконтроллері негізіндегі құрылғы.
Оның құрамына микроконтроллермен ыңғайлы жұмыс істеу үшін қажетті барлық заттар кіреді: 14цифрлық кіріс/шығыс (оның ішінде 6 ШИМ ретінде пайдаланылуы мүмкін) -6 аналогтық кіріс, 16 МГц кварцты резонатор, USB қосқышы, қуат қосқышы, ішкі ұяшықты бағдарламалау (ICSP) және түйме
ағызу. Құрылғымен жұмысты бастау үшін жай ғана AC / DC-адаптермен немесе батареямен, немесе USB кабелі арқылы оны компьютерге қосып қуат беру жеткілікті.
Барлық алдыңғы Ардуино платаларына қарағанда, UNO USB-UART интерфейс түрлендіргіш ретінде ATmega16U2 микроконтроллерін (ATmega8U2 R2 нұсқасына дейін) FTDI микросхемасының орнына пайдаланады.
Arduino UNO платасында R2 нұсқасын жаңарту процессін жеңілдету үшін 8u2 микроконтроллердің HWB желісін жерге тартатын резистор қосылған.
R3 нұсқасындағы өзгерістер төменде көрсетілген:
Распиновка - 1. 0: SDA және SCL (AREF шығу жанында) қорытындылары, сондай-ақ RESET шығу жанында орналасқан екі жаңа шығулары қосылды. Бірінші-IOREF-ардуиноның жұмыс кернеуіне қарай кеңейту платаларына мүмкіндік береді. Бұл шешім AVR базасында 5В-Ардуино сияқты кеңею платаларының үйлесімділігіне арналған, сонымен қатар, Arduino Due платалары. Екінші шығу жері еш нәрсеге қосылмаған және болашақ мақсаттар үшін сақталған.
- Шығару тізбегінің кедергіге төзімділігі жақсартылған.
- ATmega8U2 микроконтроллері ATmega16U2-ге ауыстырылған.
"UNO"( итальян тілінен аударғанда - "бір") алдағы Arduino 1. 0 шығарылымына байланысты аталған. Arduino 1. 0 мен қоса бұл құрылғылар Arduino негізгі нұсқалары болады. UNO-Arduino платформасының эталондық моделі және USB-платалар сериясындағы соңғы нұсқа болып табылады; алдыңғы нұсқалармен салыстыру үшін код сәл ұзын болғандықтан, жақсы түсіну үшін мен әрбір бөлімнің сипаттамасымен бағдарламаның бастапқы кодын жариялаймын. Осы жұмыстың соңында мен толық бастапқы кодты жазамын.

Сонымен, алдымен біз Softwareserial кітапханасын Bluetooth Модулінің байланысы үшін және сервожетектің кітапханасын қосу керек. Бұл екі кітапхана Arduino IDE-ге қосылған, сондықтан оларды сырттан орнатудың қажеті жоқ. Содан кейін біз алты сервожетекті, Bluetooth HC-05 модулі және сервоприводтардың ағымдағы және алдыңғы позицияларын сақтауға арналған кейбір айнымалылар, сондай-ақ позицияларды сақтауға арналған массивтер немесе автоматты режим үшін қадамдарді анықтау қажет.
#include <SoftwareSerial. h> // TX RX software library for bluetooth
#include <Servo. h> // servo library
Servo myservo1, myservo2, myservo3, myservo4; // servo name
void setup()
{
myservo1. attach(3) ; // attach servo signal wire to pin 9
myservo2. attach(5) ;
myservo3. attach(6) ;
myservo4. attach(9) ;
//Setup usb serial connection to computer
Serial. begin(9600) ;
//Setup Bluetooth serial connection to android
}
void loop()
{
//Read from bluetooth and write to usb serial
if(Serial. available() >= 2 )
{
unsigned int servopos = Serial. read() ;
... жалғасыСіз бұл жұмысты біздің қосымшамыз арқылы толығымен тегін көре аласыз.
- Іс жүргізу
- Автоматтандыру, Техника
- Алғашқы әскери дайындық
- Астрономия
- Ауыл шаруашылығы
- Банк ісі
- Бизнесті бағалау
- Биология
- Бухгалтерлік іс
- Валеология
- Ветеринария
- География
- Геология, Геофизика, Геодезия
- Дін
- Ет, сүт, шарап өнімдері
- Жалпы тарих
- Жер кадастрі, Жылжымайтын мүлік
- Журналистика
- Информатика
- Кеден ісі
- Маркетинг
- Математика, Геометрия
- Медицина
- Мемлекеттік басқару
- Менеджмент
- Мұнай, Газ
- Мұрағат ісі
- Мәдениеттану
- ОБЖ (Основы безопасности жизнедеятельности)
- Педагогика
- Полиграфия
- Психология
- Салық
- Саясаттану
- Сақтандыру
- Сертификаттау, стандарттау
- Социология, Демография
- Спорт
- Статистика
- Тілтану, Филология
- Тарихи тұлғалар
- Тау-кен ісі
- Транспорт
- Туризм
- Физика
- Философия
- Халықаралық қатынастар
- Химия
- Экология, Қоршаған ортаны қорғау
- Экономика
- Экономикалық география
- Электротехника
- Қазақстан тарихы
- Қаржы
- Құрылыс
- Құқық, Криминалистика
- Әдебиет
- Өнер, музыка
- Өнеркәсіп, Өндіріс
Қазақ тілінде жазылған рефераттар, курстық жұмыстар, дипломдық жұмыстар бойынша біздің қор #1 болып табылады.

Ақпарат
Қосымша
Email: info@stud.kz