Ғаламдық жерсеріктік навигациялық жүйелер: құрылымы, даму тарихы және геодезиялық қолданылуы

КІРІСПЕ
Адамдар ежелден бері өмір сүрген жерін, бағытын әр түрлі анықтады. Бұл әдістер қазіргі уақытта қолданылады. Бірақ, адамдар жердің жасанды серігің ұшырып, ғарышты игере бастағанда, технологияның дамуымен жерді анықтаудың жаңа әдістері пайда болды.
Жалпы спутниктік жүйе дегеніміз не?
Бұл қалай жұмыс істейді?
Ол геодезияда не үшін қолданылады?
Осы мәселелерге сүйене отырып, мен тезисті бастадым.
Қазіргі уақытта Жердің жасанды спутнигін қолданатын арнайы қабылдағыштардың көмегімен нүктенің орнын анықтауға болады. Бірақ осы спутниктердің ішінде орналасқан жерді анықтайтын екі Ғаламдық жерсеріктік жүйе бар: ресейлік ГЛОНАСС және американдық NAVSTAR. Сонымен қатар енді пайда болған жерсеріктік жүйелер де бар.
ГЛОНАСС және NAVSTAR (GPS) типті спутниктік жүйелермен қамтамасыз етілетін геодезиялық өлшеулердің жоғары дәлдігі бір-бірінен мыңдаған километр қашықтықта орналасқан пункттердің өзара орналасуын анықтауға мүмкіндік береді.
Нүктенің орнын жерсеріктік жүйе арқылы анықтау кезінде арнайы жерсеріктік қабылдағыштар пайдаланылады. Бұл қабылдағыштардың да өзіндік ерекшеліктері бар. Нүктенің орнын жоғары дәлдікпен анықтау үшін спутниктік қабылдағыштардың жұмыс режимдері бар.
Жалпы спутниктік технологияларды қолдана отырып, әртүрлі геодезиялық және геодинамикалық мәселелерді шешуге, оларды Геодезияның бірнеше бағытында қолдануға болады. Мысалы, теңіз геодезиясында, қолданбалы геодезияда, аэрофотогеодезияда.
Жоғарыда айтылғандар туралы дипломдық жұмыста егжей-тегжейлі жазылған.
- ГеодезияГлобалды жерсеріктік жүйе туралы жалпы түсінік
Геодезия - жерднпішіні мен мөлшерінин, қабылданған координаттар жүйесіндегіанүктелер орнын анықтаудың әдістері мен тәсілдерін зерттейтін, жер бетінің планы мен картасын салу, жер бетіндегі өлшеулерді жүргізумен айналысатын Жер туралы ғылымдардың бір саласы. Жердің физикалық бетін зерттеу үшін картографиялық және топографиялық әдістер мен пландық және биіктік координаталар құрылады. Геодезия ғылымы астрономия және гравиметриямен тығыз байланысты, сондықтан жердің пішіні мен мөлшері градустық өлшеу әдісімен анықталады. Оның шамасы - географиялық координаттар арқылы доғалардың сызықтық және бұрыштық мәндерін анықтаудан тұрады. Өндірістік, гидротехникалық және т. б. құрылыс объектілерінің пландық пен биіктік негізін салуды және инженерлік түсірімдерді орындау мәселелерін инженерлік геодезия шешеді. Геодезиялық тәсілдермен жер сілкінудің алдын ала болжау мүмкіндігін анықтау мақсатында, жер қыртысының жылжуын зерттеу үшін Тянь-Шань аймағында геодинамикалық болжау полигоны құрылды. Полигонда қазіргі кездегі жер қыртысының жылжуының вертикаль және горизонталь құраушылары зерттеледі.
Геодезия әртүрлі ғылыми пәндермен тығыз байланысты, соның ішінде математика, астрономия, физика, механика, автоматика, электроника, география, фотография және сызу. Қазіргі кезде көп инженерлік ғылымдар геодезияның көмегінсіз дами алмайды.
Геодезия есептерін шешу үшін жерсеріктік радионавигациялық жүйені пайдалану көп функциялы жерсеріктік жүйелер пайда болғанда қажет болды. Онда пункттердің координаталарын мм-ге дейінгі дәлдікпен анықтауға мүмкіндік беретін жердің навигациялық жасанды серіктерінен, объектіге дейінгі ара қашықтық фазалық өлшеу әдісімен іске асырылды.
Ежелде адамдар бағдар алу үшін аспан денелеріне қарап болжаған. Теңіз саяхатшылары Ай мен Күнге қарап бағдар алған. Бірақ ауа-райы нашар болса
бағыттаан ауытқып кету мүмкін.
Кейін компос пайда болған сон, ауа-райына тәуелділік аяқталды.
Жерсеріктік радионавигациялық жүйелер дегеніміз - навигациялық мәселелерді шешу мен жергілікті жердің нүктелерінің координаталарын, жердің арнайы навигациялық жасанды серіктерінен берілетін, тірек нүктелері қызметін атқаратын радиосигналдар бойынша анықтауға (орнын анықтау, позициялау) арналған техникалық құралдар кешені [1] .
- Глобалды жерсеріктік жүйенің даму тарихы
Глобалды жерсеріктік жүйенің (ЖРНЖ) даму тарихы, ғарыштық геоде-
зияның даму тарихымен байланысты. Ол алғашқы жасанды жер серігін
ұшырған кезден басталды.
Алғашқы кезеңі негізінен 1958-1970 жылдарды қамтиды. Бұл кезеңде жасанды жер серігін бақылау әдістері, сондай-ақ олардың орбиталарын есептеу мен талдау әдістері жасалды. Жасанды жер серігін бақылаудың негізгі әдісі, арнайы құрастырылған фотокамера арқылы іске асырылатын фотографиялық әдіс болды. Бақылаудың өңделген әдісі негізінде ғарыштық триангуляцияның ғаламдық желілері, Жер моделі жасалып, Жердің гравитациялық өрісі зерттелді. Бұл пункт координаталарын анықтау әдісінің кемшіліктері: екі пунктте бір мезгілде синхронды бақылауды ұйымдастыру қиындығы бір-бірінен едәуір қашықтықта тіркелген екі пункттен, бір уақытта жер серігінің көрінуін қамтамасыз ететін жақсы ауа-райы жағдайларының қажеттілігі.
1970-1980 жылдары жасанды жер серігінің дамуының екінші кезеңі болды. Бұл кезеңдерде жасанды жер серігін бақылаудың жаңа әдістері жасалады, яғни оларға - лазерлі және радиотехникалық қашықтық өлшеуіш, жерсеріктік альтиметрия жатады.
Жасанды жер серігінің фотографиялық бақылау әдісінің кемшіліктері: триангуляция әдісімен ғаламдық геодезиялық желіні құру кезінде кейбір қиыншылықтар туындады. Сондықтан, пункттердің координаталарын анықтау үшін жасанды жер серігіне бағыттарды анықтау әдістерінің орнына, оларға дейінгі ара қашықтықты өлшеу әдістері қолданыла басталды. Сонымен, нүкте орнын анықтау мәселелерін жерсеріктік геодезияда шешу үшін трилатерация әдістері қолданыла бастады. Осы кезеңде алғашқы жерсеріктік навигациялық жүйелер: NNSS (Navy Navigation Satellite System) АҚШ-тың әскери-теңіз күштеріне арналып, азаматтық пайдаланушылар үшін ашылғаннан кейін, «Transit» деген атпен белгілі болды. Ал «Цикада» (СССР) 1979 жылы пайдалануға енгізіліп, әскери-теңіз флотының мұқтаждықтарын навигациялық қамтамасыз етуге қажет болды. Жасанды жер серігінің алғашқы буынына - апат болғандарды анықтайтын COSPAS - SARSAT халықаралық жүйесі жатады.
Алғашқы шыққан барлық жерсеріктік жүйелердің кемшіліктері болды.
Оларға аймақты шектеулі қамту, координаталарды анықтаудың төменгі дәлдігі және навигациялық мәселелерді ұлғайтуға қажет уақыттың үлкен аралығы жатады. Жасанды жерсерікке дейінгі ара қашықтықты өлшеу негізіне - Доплер әдісі жатады.
Бұл кемшіліктердің себебі: ЖНЖС (жердің навигациялық жасанды серіктері) орбиталарының төмен биіктігі мен олардың шектеулі саны; олар Жердің барлық беті бойынша ЖНЖС радиосигналдарын қабылдауға мүмкіндік бермейді. Бұл ЖНЖС орбиталарының биіктігі 1000 км-ді құрап, небары 6 ЖНЖС қолданылған. Ара қашықтықты анықтау үшін төменгі жилікті радиосигналдар қолданылды. Ол тұтынушы қабылдағышының стационарлы күйін талап етеді. Өйткені, оның тіпті аз ғана орын ауыстыруы - едәуір қателіктерге ұшыратады, яғни динамикада навигациялық анықтау мүмкіндігі болмайды.
Үшінші кезең - 1980 жылдан басталады. Бұл кезең көп функциялы
NAVSTAR (Navigation Satellite Timing and Ranging, США) жерсеріктік радионавигациялық жүйенің жасалуымен белгілі болды. Ол бізге GPS (Global Position System) және ГЛОНАСС (Ғаламдық навигациялық жерсеріктік жүйе, КСР0, Ресей) аббревиатурамен белгілі.
2005 жылдан бастап, Еуропа ғарыштық агеттігінің жерсеріктік радионавигациялық жүйесі - Galileo ғарыштық сегменті өрістеді. Навигациялық жасанды жерсерік орбиталарының биіктігі мен олардың сандарын арттыру, сондай-ақ басқа факторлар Жердің кез келген нүктесінде, кез келген уақытта және кез келген ауа райында нүкте орнын анықтау үшін, жерсеріктік радионавигациялық жүйені қамту әрекетін ғаламдық етуге ЖНЖС-нің қажетті мөлшерінің радиокөрінушілігін қамтамасыз етті. Осы кезде жаңа жүйелерде нүкте координаталарын анықтау дәлдігін күрт жоғарылатуға, сондай-ақ навигациялық мәселелердің бүкіл кешенін нақты уақыт аралығында шешуге мүмкіндік туады. Бұл ЖРНЖ деректерін тұтынушылар, санының едәуір өсуіне алып келді. Навигациядан бөлек координаталарды анықтау дәлдігін жоғарылату, жерсеріктік технологияларды геодезияда, геодинамикада, топографияда, Жерді қашықтықтан зондтауда, геоақпараттық технологияларда, т. б. пайдалануға мүмкіндік береді [2] .
GALILEO - Еуропалық жерсеріктік навигациялық жүйе одағы мен Еуропалық ғарыштық агенттіктің бірлескен жобасы. Бұл жүйе геодезиялық және навигациялық есептерді шешуге арналған. Қазіргі таңда Галилео жүйесінен сигналды тек Altus Positioning Systems, Septentrio және JAVAD GNSS компанияларының қабылдағыштары ғана қабылдап және оны өңдей алады. Еуропалық одақ мемлекеттерінен басқа жобада Қытай, Израйль, Оңтүстік Корея, Украйна, Ресей елдері кіреді. «Галилео» жүйесі, орбитаға жоспарланған 30 жерсерік ұшырылған сон, 2014-2016 жылдары қолданысқа беріледі. Ресейлік ГЛОНАСС және америкалық GPS жүйелеріне қарағанда, Галилео жүйесі ұлттық әскери ұйымдармен басқарылмайды.
Бейдоу - Қытай елінде ғана қолданысқа берілген жерсеріктік навигациялық жүйе. Қазіргі таңда жер орбитасына 8 жерсерігі шығарылды. Жерсеріктер саны 2020 жылы 35 есе өскенде, бұл жүйе бүкіләлемдік қолданықа беріледі деп жоспарлануда. «Бейдоу» бағдарламасы 2000 жылы құрыла басталды. 2007 жыл орбитаға алғашқы жерсерігі ұшырылды.
IRNSS - Үнді навигациялық жерсеріктік жүйесі. Осы елде және шекаралас елдерде ғана қолдану жоспарланған. Алғашқы жерсерік 2008 жылы ұшырылды. Қазіргі кезде 7 жерсерік ұшырылған. Жоспар бойынша барлық жұмыстар 2011 жылы аяқталады деп жоспарланған [3] .
1. 1. 2 Глобалды жерсеріктік жүйенің құрылымы
Жерсеріктік радионавигациялық жүйе 4 сектордан тұрады:
- космодром;
- ғарыштық сектор;
- тұтынушы сектор;
- бақылау мен басқару секторы.
Космодром - ЖНЖС-нің жеткізгіш зымыран арқылы жүйені кұру кезінде берілген орбиталарға шығарылуын қамтамасыз етеді. Қазіргі заманғы ЖНЖС-нің ресурстары шамамен 10 жылды құрайды және ол қозғалтқыш отын қорының мөлшеріне тәуелді. Сол арқылы орбитаның берілген уақытқа дейінгі кезеңдік түзетуін жүргізеді. ЖНЖС есептеу орбитасынан, Жердің гравитациялық өрісі және басқа планеталардың, атмосфераның кедергісінен басқа да қалыпсыз факторларының әсерінен шығады.
Ғарыштық сектор белгілі мөлшердегі ЖНЖС-ден тұрады. ЖНЖС жиынтығын - шоқ жұлдыз деп атайды. ЖРНЖ-нің жұмыс істету идеологиясына сәйкес, ЖНЖС координаталары белгілі тірек нүктесі қызметін атқарып, кеңістіктік қиылыстыру бойынша Жер бетіндегі пунктгтер координаталарын анықтауды жүзеге асырады. ЖНЖС бортына радионавигациялық аппаратура орнатылады. Ол жер серігі мен жердегі бақылау пункттері арасындағы қашықтықты есептеуге қажет радиосигналдардың Жерге берілуін жүзеге асырады. Сонымен қатар, әрбір ЖНЖС-ден жерсерігі эфемеридалары, борт сағатының уақыт шкаласының түзетулері, альманах - барлық ЖНЖС шоқжұлдыздары жөніндегі ақпараттан құралған навигациялық деректер беріледі. Жер серігінде жұмыс істеуге қажет радионавигациялық аппаратурадан бөлек, кеңістіктік бағытталуды, жер серігін баллистикалық өлшеуді, басқаруды, энергиямен қоректендіруді, т. б. қамтамасыз ететін жабдықтар бар.
ЖРНЖ-нің көп функциялы міндеті, ғарыш секторын құру ерекшеліктерін анықтайды. ЖНЖС орбитасының биіктігі шамамен 2 км болуы тиіс, ол әрбір жер серігінен радиокөрінушіліктің сипатым ғаламдық тұрғыда қамтамасыз етеді. Мұндай биіктіктегі ЖІІЖС-нің айналу кезеңі шамамен 12 сағат құрайды. Орбита биіктігі ЖНЖС-нің айналу кезеңі, жұлдызды тәуліктің жартысына тең болатындай етіп іріктеліп алынған. Осының әсерінен, жұлдызды тәулікте бір рет әрбір ЖНЖС жер бетінің бірдей нүктесінен өтеді. Әрбір орбитадағы жер серіктері 1, 5 сағат аралығында жүреді және экваторды 22, 5°С бойлық бойынша жылжып, қиып өтеді. ЖНЖС-нің мұндай қозғалу құрылымы әрбір жер серігін тәулігіне 1 рет жүйенің бақылау-өлшеу пунктінен, оның жұмысын бақылау мақсатында қадағалауға мүмкіндік береді.
Белгілі бір жерді анықтаудың қажетті дәлдігіне сигналдарды бір мезгілде кем дегенде 4 ЖНЖС-ден қабылдау кезінде жетеді. Сондықтан, шоқжұлдыздағы жерсерігінің саны кем дегенде 24 болуы қажет. Сонымен қатар, белгілі бір жерді анықтау дәлдігіне ЖНЖС-нің орналасу геометриясы да әсер етеді. Олар барлық ас пан сферасы бойынша біртекті орналасуы тиіс. Ол үшін жер серіктерінің жазықтықтары бір-біріне қатысты бірнеше орбиталарда біртекті орналасады.
NAVSTAR жер серігінің жүйесі (Navigation Satellite Timing and Ranging, США) . Жер серігінің радионавигациялық жүйеде 24 GPS жердің навигациялық жасанды серіктерінің (соның ішінде үшеуі резервте) бір-бірінен 60°-пен әрқайсысында 3-4 жер серігі бойынша жылжытылған 6 шеңбер маңындағы орбиталарда орналасады.
GPS-тің жердің навигациялық жасанды серіктері орбиталарының биіктігі,
шамамсн 20200 км-ді кұрайды. Айналу мерзімі 11 сағат 57 минут 58, 3 сек. Соңғы буын жер серігінің массасы 1044 кг. Қазіргі таңда орбитада екінші және үшінші буынның тең бөлінген 29 жер серігі орналасуда.
ГЛОНАСС спутниктік жүйесі (жаһандық навигациялық спутниктік жүйе, Ресей) . ГЛОНАСС жүйесінің спутниктері үш орбиталық жазықтықта орналасқан, әрқайсысы 8 дана, экваторлық жазықтыққа 64, 8° көлбеу. Дөңгелек орбитаның биіктігі - 19 000 км. жер айналасындағы спутниктердің айналу кезеңі-11 сағат 15 мин 44 сек. Спутниктің массасы-1415 кг. қызмет мерзімі-3, 5 жыл. Жүйедегі Жердің жасанды навигациялық спутниктерінің есептік саны 24 спутникті құрайды. 1982 жылдан бастап 74 ЖНЖС жіберілді және қазіргі уақытта 18 спутник жұмыс істейді. Спутниктік жүйенің ғарыш секторы 1-суретте көрсетілген.
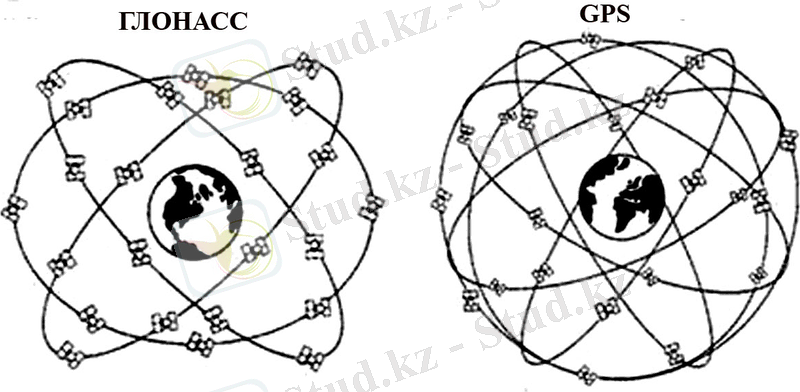
1-сурет. NAVSTAR мен ГЛОНАСС жер серіктерінің ғарыштық секторы
Осылайша, қазіргі уақытта ГЛОНАСС жерсеріктік радионавигациялық жүйесі әзірленуде. Сонымен қатар, бұл жүйе GNSS көмегімен GPS жүйесінің қосымшаларының бірі болып табылатын жер серіктерінің жұмыс істейтін тобы. Бұл VNG сигналдарын қабылдауға арналған шабу жабдығының (GPS-қабылдағыштардың) көмегімен екі жүйені де жайғастыруға қолайлы жағдай жасауға мүмкіндік береді.
Барлық үш жүйенің радионавигациялық сигналдарын қабылдауға арналған тұтыну жабдығын жасау геодезиялық және навигациялық міндеттерді шешуге ықпал етеді және нәтижелердің дәлдігіне сенімділік туғызады.
Еуропалық ғарыш агенттігінің Srns-Galileo ғарыш сегменті 2005 жылдан бастап жұмыс істейді. Бұл навигациялық спутниктердің орбиталық биіктігін және олардың санын арттырады. Сонымен қатар, басқа факторлар жердің кез-келген нүктесінде, кез-келген ауа-райында және кез-келген уақытта нүктенің орналасқан жерін анықтау үшін ғаламдық деңгейде ДМК-нің қажетті мөлшерін қамтамасыз етті. Спутниктік жүйелердің сипаттамалары 1-кестеде келтірілген.
1. 1-кесте
Жерсеріктік жүйелерді салыстыру
ЖРНЖ-ні басқару, бақылау секторы орталық пен планетаның әр түрлі бөліктерінде орналасқан бірнеше қадағалау станцияларынан тұрады.
Бұл станциялардың негізгі міндеті спутниктердің есептік параметрлеріне негізделген жүйе, спутниктердің эфемеридтерін жүйелі түрде анықтау болып табылады. Сонымен бір мезгілде әрбір спутникте сағат көрсеткіштерін түзету, навигациялық деректердің мазмұнын мерзімді жаңарту және оларды жүктеу станциялары арқылы РНГ-ға беруді ұйымдастыру және т. б., олардың жұмыс істеу сәйкестігін бақылау қажет. Бақылау станциялары тәулік бойы жүйенің барлық спутниктерін бақылайды. Олар бүкіл әлемде біркелкі орналасқан: көтерілу, Гавай аралы, Куажалайн атоллдары және Диего Гарсия. Бір бақылау станциясы Колорадо Спрингс қаласындағы (АҚШ) жетекші станциямен біріктірілген спутниктерді бақылау (ағымдағы эфемеридтерді анықтау) Атом сағаттарымен жабдықталған екі жиіліктегі арнайы GPS қабылдағыштардың көмегімен жүзеге асырылады. Бұл станцияларда көзге дейінгі барлық қашықтық өлшенеді және навигациялық деректер қабылданады. Нәтижесінде ионосфераның әсерінен болған барлық түзетулер анықталады және спутниктік сағаттардың жүру дәлдігі жазылады. Барлық станциялар жергілікті ауа-райы жағдайлары туралы ақпарат жинайды, осылайша жетекші станциялар жүйенің нипінің тропосфералық, қиылысатын радионавигациялық сигналдарын анықтай алады. Қашықтықты өлшеу нәтижелері бойынша спутниктердің эфемеридтері анықталады және олардың шамамен есептеулері жасалады. Өлшеулер радиосигналдардың тропосфералық кідірісін қоспағанда, көкжиектен 15 °C жоғары биіктікте орналасқан спутниктер бойынша ғана жүргізіледі (2-сурет) .
Ғарыштық
сектор
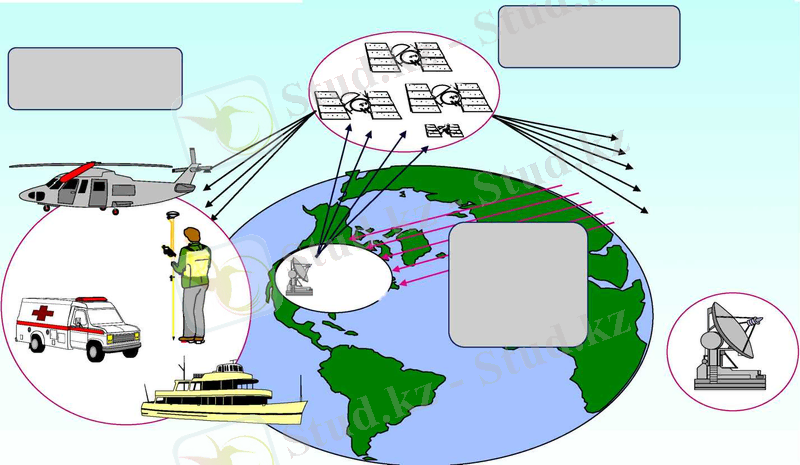
Тұтынушы
секторы
Колорадо Спрингс
Бақылау
станциясы
Диего Гарсия ар. Вознесения ар. Атолл Кваджелейн Гавай аралдары Колорадо-Спрингс
Бақылау
және
басқару секторы
2-сурет. Жерсеріктік радионавигациялық жүйенің құрылымы
Жетекші басқару станциясы барлық GPS LPR жұмысын үйлестіреді. Ол тұруға ықтиярхаттың мәртебесі туралы барлық ақпаратты жинайды, болашақ спутниктік эфемеридтерді, Сағат сайынғы түзетулерді есептейді, әр тұруға арналған ақпараттық мәліметтер мен альманахтарды жасайды.
Жетекші станцияның атом сағаты бүкіл GPS жүйесінің анықтамалық сағаты болып саналады және АҚШ-тың Ұлттық уақыт стандартына байланысты
Осы спутниктің координаттарын жанармай құю станциясына жеткізумен қатар, жетекші станция олардың нақты мәндерінің жиынтығын орындайды. Ол тұтынушылар үшін мәндерді, жоғары дәлдіктегі Геодезиялық өлшеулерді қолдана алады.
Жүктеу станциялары күніне үш рет Орбита параметрлері және басқа да қажетті мәліметтермен ақпараттық хабарламалар жібереді.
Жүктеу станциялары, жетекші станциялардың командаларына сәйкес, спутник бортында орналасқан реактивті қозғалтқыштардың көмегімен ВНЖС орбиталарын түзетеді.
Бақылау станцияларынан басқа, GPS жүйесінде бақылау кезінде тұруға ықтиярхаттың нақты эфемеридтерін анықтайтын станциялар желісі бар. Бұл sidpet - біріктірілген халықаралық GPS желісі (20 станция), IGS - геодинамикаға арналған халықаралық GPS қызметі (шамамен 50 станция) . жүйенің уақыт шкаласын анықтайды.
1. 1. 3 спутниктік жүйенің орналасқан жерін анықтау принциптері
"Нүктенің орнын анықтау, позициялау" терминдері әр навигациялық геодезиялық мәселенің шешімін біріктіре отырып, нүктенің координаталарын анықтау үшін синоним ретінде қолданылады.
LVL-де орынды анықтау принципі кеңістіктік қиылысқа негізделген (сурет. 3) . Жүйенің тірек нүктелері (1, 2, 3) координаттары жоғары дәлдікпен анықталатын тірек нүктелері ретінде әрекет етеді. Жер бетіндегі m нүктесінің координаталарын анықтау үшін кеңістіктік қиылысу сызығы мен LC-ден жер бетіндегі нүктеге дейінгі сызықтық қашықтықты талдау өрнегі келесідей: R-ден үш LC-ге дейінгі сызықтық қашықтықты анықтау қажет.
 , (1. 1)
, (1. 1)
мұндағы, Х с , Ү с , Z c жүйе серігінің координаталары;
Х n , Y n , Z n - жер бетіндегі пункттің анықталатын координаталары.
Үш ЖНЖС-ге дейінгі ара қашықтықты біле отырып, Жер бетіндегі пункттің үш белгісіз (анықталатын) кооординаталары (1. 1) түріндегі үш теңдеудегі жүйені аламыз. Нүкте орнын анықтау есептерінің шешімі, үш тендеулер жүйесін шешуге алып келеді. Есептің мұндай шешімі ЖНЖС-ге дейінгі қашықтықтың (ара қашықтығы ) дәл белгілі кезінде мүмкін. Іс жүзінде ЖНЖС мен пайдаланушының қабылдау аппаратурасы сағаттарындағы уақыт шкалаларының айырмашылықтары әсерінен, уақытша түзету (қателік) ∆t пайда болады. ЖНЖС-ге дейінгі ара қашықтық, радиосигналдың жүріп өту уақыты t мен оның жылдамдығы v, бойынша өлшенгендігінен, ара қашықтықтағы қателіктер мәні едәуір көбейеді.
Сондықтан, бұл қашықтықты - жалған қашықтықтар деп атайды. Демек, нақты қашықтық (р), уақытша түзетулерді есепке ала отырып, мына формула
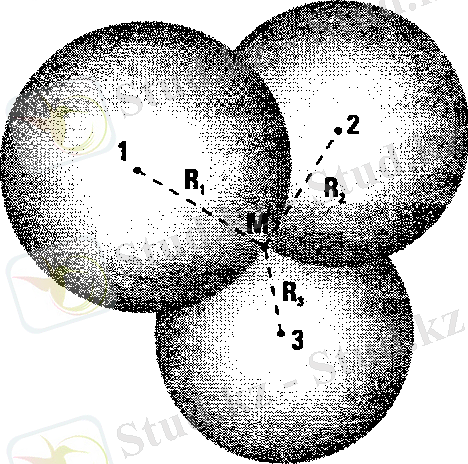
3 - сурет. Сызықтық кеңістікті қиылыстыру
арқылы есептеледі:
ρ = R + υ∆t, (1. 2)
Төртінші белгісіз ∆t пайда болады, оны алып тастау үшін (2) түріндегі төрт теңдеу қажет. Яғни, төртінші ЖНЖС-ге дейінгі жалған қашықтықты (R) өлшеу қажет. Нәтижелер дәлдігін жоғарылату үшін (2) түрдегі теңдеулер жүйесі, ең кіші квадраттар әдісі бойынша шешілуі мүмкін. Ол үшін артық өлшеулер қажет.
Пайдаланушының қазіргі замандағы аппаратурасы, нүкте орнын анықтау бойынша есептерді шешу алгоритмі енгізілген компьютер болып табылады. Кеңістіктік қиылыстыру геометриясынан үшінші ЖНЖС-ні бақьлау нәтижесінде, жер бетіндегі пункттің орны екі нүктеден таңдап алынады. Сонымен қатар, олардың біреуі нақты орнынан көп қалып қойғандықтан қате, әрі жарамсыз болады. Жоғары дәлдікте шешу қажетсіз, тек нәтижесін жылдам алу қажет болғанда, яғни навигациялық есептерді шешу кезінде орнын анықтау есебін осылай шешеді.
Уақыт шкаласы дәлдігінің ЖНЖС-ге дейінгі қашықтығын өлшеуге әсерін, егер R қашықтығының орнына өлшенген қашықтықтар арасындағы айырмашылықты пайдалансақ, алып тастауға болады, яғни:
∆ρ 1 = ρ 2 - ρ 1; ∆ρ 2 = ρ 3 - ρ 1 , (1. 3)
мұндағы, ∆p 1 - жердегі пункт пен екінші ЖНЖС арасындағы шынайы қашықтық айырмашылығы;
р 1 , р 2 - жер бетіндегі пункт пен бірінші ЖНЖС арасындағы қашықтық;
∆р 2 - сәйкесінше жер бетіндегі пункт пен үшінші рз және бірінші ЖНЖС- тің рі арасындағы қашықтықтар айырымы.
Өлшеу үш ЖНЖС-ге дейін бір мезгілде жүргізілгендіктен, ∆t-нің уақытша түзетуі барлық қашықтықтарда бірдей. Демек, (1. 1) түріндегі теңдеулерде сәйкесінше ∆t шамасы алып тасталады, яғни:
∆ρ 1 = R 2 - R 1 ; ∆ρ 2 = R 3 -R 1 , (1. 4)
... жалғасыСіз бұл жұмысты біздің қосымшамыз арқылы толығымен тегін көре аласыз.
- Іс жүргізу
- Автоматтандыру, Техника
- Алғашқы әскери дайындық
- Астрономия
- Ауыл шаруашылығы
- Банк ісі
- Бизнесті бағалау
- Биология
- Бухгалтерлік іс
- Валеология
- Ветеринария
- География
- Геология, Геофизика, Геодезия
- Дін
- Ет, сүт, шарап өнімдері
- Жалпы тарих
- Жер кадастрі, Жылжымайтын мүлік
- Журналистика
- Информатика
- Кеден ісі
- Маркетинг
- Математика, Геометрия
- Медицина
- Мемлекеттік басқару
- Менеджмент
- Мұнай, Газ
- Мұрағат ісі
- Мәдениеттану
- ОБЖ (Основы безопасности жизнедеятельности)
- Педагогика
- Полиграфия
- Психология
- Салық
- Саясаттану
- Сақтандыру
- Сертификаттау, стандарттау
- Социология, Демография
- Спорт
- Статистика
- Тілтану, Филология
- Тарихи тұлғалар
- Тау-кен ісі
- Транспорт
- Туризм
- Физика
- Философия
- Халықаралық қатынастар
- Химия
- Экология, Қоршаған ортаны қорғау
- Экономика
- Экономикалық география
- Электротехника
- Қазақстан тарихы
- Қаржы
- Құрылыс
- Құқық, Криминалистика
- Әдебиет
- Өнер, музыка
- Өнеркәсіп, Өндіріс
Қазақ тілінде жазылған рефераттар, курстық жұмыстар, дипломдық жұмыстар бойынша біздің қор #1 болып табылады.

Ақпарат
Қосымша
Email: info@stud.kz