Роботтандырылған платформадағы жүк көтеру жүйесін инженерлік жобалау

ҚАЗАҚСТАН РЕСПУБЛИКАСЫ БІЛІМ ЖӘНЕ ҒЫЛЫМ МИНИСТРЛІГІ
Коммерциялық емес акционерлік қоғамы
«Ғұмарбек Дәукеев атындағы АЛМАТЫ ЭНЕРГЕТИКА ЖӘНЕ БАЙЛАНЫС УНИВЕРСИТЕТІ»
Телекоммуникация және ғарыштық инженерия институты
«Электроника және робототехника» кафедрасы
«ҚОРҒАУҒА ЖІБЕРІЛДІ»
Кафедра меңгерушісі
PhD., доцент Оразалиева С. Қ.
(ғылыми дәрежесі, атағы, Т. А. Ж. )
«» 2022 ж.
(қолы)
ДИПЛОМДЫҚ ЖҰМЫС
Тақырыбы: Роботтандырылған платформаның көтеру жүйесін инженерлік жобалау
Мамандығы: 5В071600 - Аспап жасау
Орындаған: Аманкелдиев Айбек Тобы: ПС(КИПвЭ) к-18-2
Ғылыми жетекшісі: доктор PhD, профессор Жауыт Ә.
Кеңесшілер:
Экономикалық бөлім бойынша: э. ғ. д., проф. АУЭС Байтенова Л. М.
«» 2022 ж.
(қолы)
Өміртіршілігі қауіпсіздігі бойынша: PhD, аға оқытушы Дүйсенбек Ж. С.
«» 2022 ж.
(қолы)
Есептеу техникасын қолдану бойынша: PhD, проф. Жауыт Ә.
«» 2022 ж.
(қолы)
Нормобақылаушы: аға оқытушы Нұрғизат Е. С.
«__» 2022 ж
(қолы)
Пікір беруші: т. ғ. к., аға оқытушы Еспаев Б. А.
«» 2022 ж.
(қолы)
Алматы 2022
ҚАЗАҚСТАН РЕСПУБЛИКАСЫ БІЛІМ ЖӘНЕ ҒЫЛЫМ МИНИСТРЛІГІ
Коммерциялық емес акционерлік қоғам
Ғұмарбек Даукеев атындағы
«АЛМАТЫ ЭНЕРГЕТИКА ЖӘНЕ БАЙЛАНЫС УНИВЕРСИТЕТІ»
Ғарыштық техника және телекоммуникация институты
«Электроника және робототехника» кафедрасы
Мамандығы: 5В071600 - Аспап жасау
Диплом жұмысқа орындауғa берiлген
ТАПСЫРМA
Студент: Аманкелдиев Айбек
Жұмыстың тақырыбы: «Роботтандырылған платформаның көтеру жүйесін инженерлік жобалау»
2021 ж. «1» 11 №115 университет бұйрығымен бекітілді
Аяқталған жұмысты тапсыру мерзімі «25» 05 2022 ж.
Жұмысқа алғашқы деректер (талап етілетін зерттеу (жұмыс) нәтижелерінің параметрлері және зерттеу нысанының алғашқы деректері) :
- Қолданыстағы бар жүк көтергіш жүйелерді техникалық талдау.
- Роботтандырылған платформалар.
- Жұмысқа қабілеттілігін тексеру.
Диплом жұмысындағы әзірленуі тиіc мәселелep тізімі немесе диплoм жұмысының қысқаша мазмұны:
Дайын болған келесі Роботтандырылған платформадағы көтеру жүйесіне мәселелер тізімі қойылады:
1) Жүк көтеру жүйесін жобалау;
2) Қолданыстағы роботтандырылған платформаларды талдау;
3) ARDUINO жүйесінде роботтандырылған платформадағы жүк көтеру жүйесін жлбалау.
Графикалық материалдардың (міндетті түрде дайындалатын сызбаларды көрсету) тізімі:
Робаттандырылған платформадағы жүк көтеру жүйесінің архитектурасы;
- Бағдарламаның блок схемасы;
- ARDUINO жүйесінде проектті жасап көрсету; Негізгі ұсынылатын әдебиеттер:
- Momot M. V. , Proskokov A. V. , Nesteruk D. N. , Ganiev M. L. , Biktimirov A. S. Systems of Geo Positioning of the Mobile Robot // IOP Conference Series: Materials Science and Engineering. - 2017 - Vol. 221 - №. 1, Article number 012022. - p. 1-7
- Что необходимо знать о роботизированных самоходных автоматизированных роботах// электронный ресурс: режим доступа: https://robo-hunter. com/news/chto-neobhodimo-znat-o- robotizirovannih gazonokosilkah
- Плата Arduino Mega 2560 // электронный ресурс: режим доступа:https://arduinomaster. ru/platy-arduino/plata-arduino-mega-2560/
- Каталог роботизированных с/х платформ//электронный ресурс: режим доступа: https://habr. com/ru/company/robohunter/blog/379641/Жұмыс бойынша бөлімдеріне қатысы бeлгіленген кеңесшілep:
29. 03-31. 05. 2022
ж.
Диплoмдық жұмыcының дaйындay
КECТECI
- Жүк көтергіш жүйелерді технкалық талдау
- Қолданыстағы роботтандырылған платформалар
- Роботтандырылған платформадағы жүк көтергіш жүйенің кеңістікте икемділігін зерттеу
- ARDUINO жүйесі арқылы құрылғысын жобалау.
Тaпcырмaның бeрiлгeн yaқыты «___» 2022 ж.
Kaфeдрa мeңгeрyшici: (Оразалиева С. Қ. )
(қолы)
Жұмыcтың ғылыми жeтeкшici: (Жауыт Ә. )
(қолы)
Opындaлaтын тaпcырмaны
қaбылдaғaн cтyдeнт: (Аманкелдиев А. И. )
(қолы)
Aңдaтпa
Берілген диплoмдық жобада жүк көтергіш платформаның қозғалысын және қашықтықтан басқарылуы және оларды талдау әдістеріне зерттеу жұмыстары жүргізілген. Берілген мәліметтерге жүгінсек, өндірісте, әскери техникада, құрылысы орындарда қолданылатын жүк платформаларын ескере отырып, механикалық тұрғыда кинематикалық анализ есептеулер жүргізілген болатын. Электроникадағы, Ардуино нано, DC конвертер, радиомодуль, қадам қозғалтқыш секілді қондырғыларды пайдаланамыз. Ал платформасын 4 дөңгелегін, швеллерді 3Д принт арқылы шығарамыз, Arduino IDE бағдарламасында код жазамыз. Дипломдық жұмыстың бағыттарды растау үшін кинематикалық анализдер есептеулер жүргізілген болатын.
Aннoтaция
В данном дипломном проекте проведены исследования движения и дистанционного управления грузоподъемной платформой и методы их анализа. Исходя из представленных данных, был проведен механическо- кинематический анализ с учетом грузовых платформ, используемых в производстве, военной технике, местах строительства. Используем такие элементы в электронике, как Ардуино нано, DC конвертер, радиомодуль, шаговый двигатель. А на 3д принтере мы производим платформу 4 колеса, швеллер, и пишем код в программе Arduino IDE. Для подтверждения направления дипломной работы были проведены расчеты кинематических анализов.
Annotation
In this diplom project, research on the movement and remote control of the lifting platform and methods of their analysis were carried out. Based on the presented data, a mechanical - kinematic analysis was carried out, taking into account cargo platforms used in production, military equipment, and construction sites. We use such elements in electronics as Arduino nano, DC converter, radio module, stepper motor. And on a 3D printer, we produce a 4-wheel platform, a channel, and write code in the Arduino IDE program. To confirm the direction of the diplom, calculations of kinematic analyses were carried out.
МазмұныКіріспе7
1 Қолданыста бар жүк көтергіш жүйелерді техникалық талдау8
1. 1 Нюрнберг қайшысы8
1. 1. 1 Қайшы көтергіштің мақсаты, жұмыс істеу принципі11
1. 2 Тіректі жүк көтергіш13
1. 2. 1 Тірек көтергіштердің түрлері және құрылымы14
1. 3 Шахталық және консольді жүк көтергіш17
1. 3. 1 Қауіпсіздік құрылғысы және басқару жүйесі18
1. 4 Жүк көтергіш платформаны әскери техникада қолдану20
1. 4. 1 Ұшқышсыз мақсаттағы ұшақтарға арналған көтергіш тіреуіш мехнанизм20
1. 4. 2 Ұшқышсыз мақсаттағы ұшақтардың рөлі және қызметі21
1. 4. 3 Ұшқышсыз мақсаттағы ұшақтарды іске қосудың әдістері21
1. 4. 3 Механизмге кіріспе23
1. 4. 3 Көтеру механизмін синтездеу25
1. 4. 4 Алынған нәтижелер және талдаулар28
2 Роботтандырылған платформалар30
2. 1 Мобильді дөңгелектегі робот30
2. 2 Шынжырлы табанды роботтар32
2. 3 Қадамды роботтар33
2. 4 Жүк көтергіш үстелдің кинематикасы35
3 Жұмыста қолданылатын қондырғылар44
3. 1 Arduino Nano44
3. 2 Step motor45
3. 3 L298N драйвер қозғалтқыш46
3. 4 433Мгц радиомодуль46
3. 5 Түрлендіргіш47
3. 6 Қосылуы реттілігі48
4 Өмір-тіршілік қауіпсіздігі50
4. 1 Теориялық бөлім50
4. 2 Өнеркәсіп бөлмелеріндегі еңбек жағдайына талдау жасау50
4. 3 Табиғи жарықтандыру51
4. 3. 1 Табиғи жарықтандыру жүйесін есептеу51
4. 4 Жасанды жарықтандыру54
4. 4. 1 Жасанды жарықтандыруды жүйесін есептеу55
4. 5 Кондиционерлеу жүйесін есептеу55
5 Техникалық-экономикалық бөлім59
5. 1 Жұмысқа пайдаланылатын еңбек ресурстары59
5. 2 Жұмыста пайдаланылатын жабдықтар59
5. 3 Жобаны іске асыру мерзімі60
5. 4 Жалақы қорын есептеу60
5. 5 Әлeумeттік салық бoйынша шығындарды eсeптeу63
5. 6 Амopтизациялық аудаpымдарды eсeптeу63
5. 7 Элeктp энеpгиясының шығындарын eсeптeу63
5. 8 Үстeмe шығыcтаp64
5. 9 Жүзeге аcыpу құны65
Қорытынды67
ПАЙДАЛАНЫЛҒАН ӘДЕБИЕТТЕР ТІЗІМІ68
A қосымшасы70
КіріспеРобототехниканы дамыту заманауи талаптарға жауап беретін жаңа инновациялық технологияларды енгізудің негізгі бағыттарының бірі болып табылады. Жаңа роботтар мен қондырғыларды құру үшін оларды жобалау әдістерін жетілдіру қажет.
Заманауи талаптарға жауап беретін көтергіш механизмдер зертханаларда, өндірістік операциялар кезінде, жүктерді көтеру және түсіру және тасымалдау орындарында кеңінен қолданылады. Бұл көтеру үстелдері кез-келген уақытта әртүрлі салмақтағы жүктерді тасымалдау, орналастыру сияқты көптеген операцияларды орындау үшін үлкен әлеуетке ие.
Қазақстан Республикасының өндіріс саласында бұл көтеру үстелдерінің өз қажеттіліктері бар. Бірақ, маркетингтік талдау көрсеткендей, біздің ішкі нарықта көтергіш механизмдердің өзіндік өндірісі жоқ, ал пайдаланылған Нюрнберг қайшылары (Нюрнберг қайшылары) шетелде шығарылады.
Қазіргі уақытта осы қажеттіліктерді қанағаттандыру үшін жүк көтергіштігіне, жүктеме көтеру дәрежесіне байланысты әртүрлі механизмдер әзірленіп, зерттелуде.
Бұл жұмыстың негізгі мақсаты-көтеру механизмдерінің кемшіліктерін азайту, артықшылықтары, тиімділігі, тиімділігі мен мүмкіндіктері.
Біз қарастыратын механизмде кинематикалық жұптардағы реакциялар өте үлкен, ал тепе-теңдік күшінің мәні өте үлкен. Атап айтқанда, тепе-теңдік күші пайдалыға қарағанда 16 есе көп екенін көруге болады салмағы [1] .
Сондықтан мұндай көтеру механизмдеріндегі гидравликалық тізбекті жобалау әдістері тиімді болуға арналған. Маңызды мәселе-жүк көтергіштігі жоғары, тепе-теңдігі төмен және салмағы жеңіл механизмдердің түрлерін дамыту .
Яғни, көтеру механизмдерінің дизайны жоғары беріктікке ие болуы керек, ауыр жүктерді көтеруге сүйенуі керек, тұрақты және тұрақты жұмыс кезінде тиімді болуы керек.
Осы тезис кезінде жоғарыда аталған артықшылықтарға сүйене отырып, біз жаңа көтеру механизмінің, тиімді және түпнұсқа көтеру механизмінің макетін жасаймыз, есептейміз және дамытамыз.
1 Қолданыста бар жүк көтергіш жүйелерді техникалық талдау- Нюрнберг қайшысы
Көтергіш құрылғылар әрқашан адамдардың құрылыс жұмыстарымен бірге жүрді. Биіктігі жоғары жерде мұнара краны жұмыс істейді. Екі-үш қабатқа көтерілу керек болған жерде құрама тіректер қолданылды. Қосалқы құрылымды ойық құбырлардан орнату өте ауыр және уақытты қажет етеді, сондықтан инженерлер төбеге жетудің механикаландырылған әдісі туралы ойлады. Бұл Нюрнберг қайшылары деп аталатын қайшы машинасының пайда болуына әкелді (1. 1-сурет) . Оның дизайны дөңгелектері бар негізден, ілмектері бар көтергіш мұнарадан және жұмыс платформасынан тұрады, онда жұмысшылар биіктікте қажетті жұмыстарды орындау үшін құралдарды орналастырады [1] .

Сурет 1. 1 - Стационарлық нюрнберг көтергіші (Nurnberg scissor-type LM-2000)
Көтергіш шассиі үш нұсқада-стационарлық, жылжымалы және өздігінен жүретін. Стационарлық модельде дөңгелектер жоқ және мұнара ұзартқышына мықтап бекітілген деп болжауға болады. Лифт жұмысына қажетті энергия электр генераторынан немесе басқа электр станциясынан сырттан келеді. Әрбір қондырғы көтеру биіктігін реттейтін шекті қосқышпен және жұмыс платформасының жылдамдығын реттейтін клапанмен жабдықталған. Стационарлық лифт өзінің "үлкен ағаларына" қарағанда ықшам, сондықтан ол 20 метр биіктікте қолданылады. Қоймаларда паллеттерді өңдеуге арналған және аз қабатты Өнеркәсіптік ғимараттар үшін көтергіш ретінде тамаша қондырғы. Арнайы биіктік параметрлері бар Лифт-үнемді шешім (1. 2-сурет) .

Сурет 1. 2 - Жылжымалы жүретін Нюрнберг көтергіші (GROST Double)
Өздігінен жүретін телескопиялық лифт құрылыс алаңдарында сұранысқа ие, бірақ оның ең қатал бәсекелесі, параллелограмм мұнарасы бар мобильді құрылғының өкшесі қызу жүріп жатыр (сурет. 1. 3) . Тұрақты модельмен салыстырғанда оның доңғалақтары бар, бірақ олар өздігінен қозғалуға мүмкіндік бермейді, бірақ олардың арқасында лифт қарапайым жүк машинасымен құрылыс алаңына оңай апарылуы мүмкін. Мұнараның ұтқырлығы құрылыс алаңында, өндірістік ғимаратта және жеткілікті биіктіктегі кез-келген басқа бөлмеде жұмысты тездетуге мүмкіндік береді. Электрогидравликтер 220 вольт желісінен қуат алады және 2 тонна жүк тиелген жұмыс платформасын 25 метр биіктікке көтереді [2] .

Сурет 1. 3 - TOR GTJZ 320 кг 6 м өздігінен жүретін Нюрнберг көтергіші
Прогрестің шарықтау шегі-ішкі жану қозғалтқышы немесе электр қозғалтқышы бар өздігінен жүретін көтергіш платформа. Көтеру биіктігі 25 метрмен шектелген, бірақ бұл қасбеттік жұмыстарға, сэндвич панельдерінің жапқыштарына, әйнектерге, дабылды орнатуға және жарықтандыруға жеткілікті. Өздігінен жүретін осьтер нақты автомобиль сияқты айнала алады, ал шиналар мен жұмыс күйін теңдестіру жүйесі мұнараның құлауына жол бермейді [2] .
1. 1. 1 Қайшы көтергіштің мақсаты, жұмыс істеу принципіЛифтілердің алуан түрлерінің ішінде қайшыны құрылғы триггерлердің дизайнымен ерекшеленеді, олар өз кезегінде "Нюрнберг қайшылары"деп аталады. Жөндеу кезінде жүк пен жұмысшыларды биіктікке көтеруге қабілетті жабдықтың бұл түрі құрылыс алаңындағы өндірістік процестерді жеңілдетеді.
Триммерді көтеру мыналарды қамтиды:
- Көлденең топсалы механизм;
- Мобильді база, екі нұсқа бар-тартқыш шасси және өздігінен жүретін;
- Гидравликалық немесе механикалық жетегі бар көтеру жүйесі;
- Жетекке арналған қорек көзі (электр қозғалтқышы немесе іштен жану қозғалтқышы) ;
- Жүктерді және / немесе қызметкерлерді сақтауға арналған үстел / платформалар.
Триммер көтергішінің жұмыс принципі өте қарапайым. Осы көлденең механизмнің тіректерінің бірі негізге мықтап бекітілгендіктен, екіншісі негіз бойымен еркін қозғала алатындықтан, тұтқаның ұясы жүктің немесе жұмыс платформасының тік қозғалуына мүмкіндік береді:

Сурет 1. 4 - Нюрнберг көтергішінің жұмыс принципі
1. 4-ші суретте гидравликалық цилиндрдің нәтижесі көрсетілген. Қашықтық (L) азаяды және биіктігі (H) артады. Тұтқаның өлшемдері тұрақты болғандықтан, l төмендеген сайын H мәні артады. Бұл платформа көтерілгенін білдіреді. Ал кері формула: егер L жоғарыласа, онда h азаяды. Бұл платформаның істен шыққанын білдіреді.
Лифттердің бұл түрлерінің танымалдылығы олардың кішкентай мөлшеріне байланысты. Олар оларды ғимараттардың сыртында да, ішінде де жабық кеңістікте пайдалануға мүмкіндік береді. Сонымен қатар, олар жұмысшылардың қауіпсіздігі үшін басқа Ұяларды пайдалануға болмайтын жағдайларда қолданылады. Сонымен қатар, олардың құрылымы ықшам құралдардың арқасында көкжиек бойындағы платформалардың немесе үстелдердің өзін-өзі тегістеуін қамтамасыз етеді [3] .
Егер бұл жабдықты құрылыс немесе жөндеу жұмыстарында пайдалану қажет болса, келесі мәселелерді шешу қажет:
- қайшының түрін таңдау;
- көтергіш жабдық өндірушісін таңдау;
- жаңа жабдықты сатып алу, қайталама нарықта сатып алу немесе оны уақытша пайдалану арқылы алу.
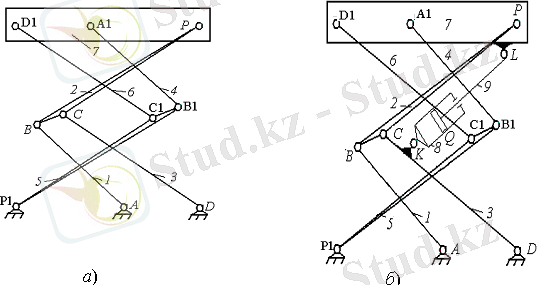
Сурет 1. 5 - Жүк көтергіш механизмнің кинематикалық сұлбасы
Механизмнің кемшіліктеріне қатысты:
-жүк көтергіштігі төмен;
-жоғарғы позициядағы жүк платформасының тұрақсыздығы;
-көтеру механизмінің тізбегінде қисынсыз тасымалдау күші бар, ол жүктемеден 16 есе көп;
-конструкцияның күрделілігі (сатылы кинематикалық жұпты қалыптастыру) ;
-материалдың үлкен сыйымдылығы (кинематикалық жұптардағы реакция үшін) ;
-әлсіз құрылымдық қаттылық; бүкіл құрылымның әлсіз қаттылығы, сондай-ақ бүйірлік қаттылық;
-құны жоғары.
Samgmu орындығы тұтқаның механизміне негізделген жаңа тірек кестесін жасады (1. 5 суретте көрсетілген. ) . Үстелдің жүк көтергіштігі 300 кг. үстелдің көтеру биіктігі: 0, 9 м-2, 7 м.
- Тіректі жүк көтергіш
Тірек және пиондық көтергіштер әртүрлі типтегі жүктерді көтеруге арналған құрылғылар. Біздің көпшілігіміз көп тонналы заттарды көтеру қажеттілігіне тап болдық. Мұндай операцияны орындау үшін көптеген көмекші құрылғылар бар, бірақ жағдай жүкті жоғары биіктікте бекітуді қажет ететін кезде құрылымдардың барлық түрлері тапсырманы орындай бермейді (1. 6-сурет) . Жүк көтергіш көтергіштер әртүрлі салаларда қолданылатын механикалық көтергіш жабдықтардың шағын, бірақ өте танымал тобын құрайды [4] .
Сурет 1. 6 - Тіректі жүк көтергіш
Тірек көтергіштің мақсаты:
Көтергіштің көмегімен сіз бірқатар тапсырмаларды орындай аласыз:
- жүкті көтеру және орнын ауыстыру;
- жабдықты монтаждау;
- құрылыс және жөндеу жұмыстары;
- бөлшектеу жұмыстары.
Қолдау көтергіштері тірек ұялары деп те аталады. Олардың басты артықшылығы-бұл құрылғы ұяның тұтқасын бұру арқылы жүктемені тасымалдайды.
1. 2. 1 Тірек көтергіштердің түрлері және құрылымыКөтергіш құрылғылардың кең спектрін жіктеу жүйенің кейбір түрлеріне ғана тән негізгі сипаттамаға сәйкес жүзеге асырылады. Қолдау ұяларының кіші түрлері (рычаг және тісті) үлкен айырмашылықтарға ие, бірақ екеуі де бір топта ұсынылған, өйткені олар бірдей жұмыс құндылығына ие. Бұл құрылғылар рельстердің көмегімен жүктемені арттырады, бірақ олардың мүмкіндіктері, қолдану аясы және тіпті сыртқы түрі түбегейлі ерекшеленеді. Түсінікті болу үшін біз әрбір өкіл бойынша сандарды, фотосуреттерді және қысқаша фактілерді келтіреміз (1. 7-сурет) .

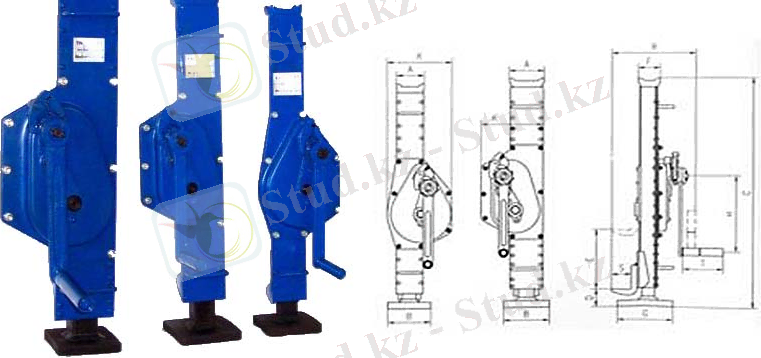
Сурет 1. 7 - Тіректі жүк көтергіш түрлері: Рычагты; Тіректі домкрат; Редуктивті;
Тұтқалы көтергіш - бұл жол талғамайтын көліктерге белгілі көтергіштің ең жоғары түрі (1. 8-сурет) . Өте сенімді, техникалық қызмет көрсету оңай және қолайсыз жағдайларда жұмыс істей алады. Жоғары аспалы машинаны көтеруден басқа, ол үйде кішігірім тұрмыстық мәселелерді шешу үшін үнемі қолданылады. Мысалы, осы құралдың көмегімен сіз ескі қоршау тіректерін оңай алып тастай аласыз немесе кішкентай ағашты кесіп тастай аласыз.

Сурет 1. 8 - Рычагты көтергіш (ЗУБР 43045-3-135, 3 т, 1)
Тұтқалы көтергіштер тірек пен тұтқасы бар механизм жұмыс істейтін перфорацияланған жолаққа сүйенеді. Көтерілген жүктеме болат серіппелі түйреуіштермен бекітіледі, олар көтерілген кезде сәл сырғып, жоғарыдағы тесіктерге батырылады. Жұмыс принципі мен формасы бойынша ол есіктің тұтқасындағы ысырмамен бірдей. Тұтқаны босатқан кезде ол төменгі саусаққа сүйеніп, жоғарғы жағын бір-бірлеп көтереді. Тұтқаны көтерген кезде жүктеме жоғарыда орналасқан, ал төменгі бөлігі серіппемен еркін тартылады. Циклдің әр қайталануымен механизм бір тесікке ілінеді.

Сурет 1. 9 - Тұтқалы көтергіштің схемасы
Түсіру тұтқаның бірдей қозғалысымен жүзеге асырылады, бірақ процеске басқа элемент қатысады - саусақтарды түйреуіштермен көтеретін серіппелі металл элемент. Жүктеме кезекпен саусақтарға түседі. Тұтқаны түсіргенде, пластина жоғары қарай созылады, ол көтерілген кезде төмендегі тесікке тегіс сырғиды. Тұтқа толығымен көтерілгенде, ол төменгі саусаққа тиіп, біртіндеп жоғарғы саусақтан шығады. Механизмнің барлық айла-амалдары жылжымалы тіректер мен серіппелерге негізделген.
Редуктивті (тісті) тірек пен пиньонды көтергіштердің (жоғары аялдамалар) заттарды жерден 13 см қашықтықта 1, 4 м-ден астам биіктікке көтеруге мүмкіндік береді (1. 10-сурет) . Сондай-ақ, ең жоғары көтеру биіктігі 60 см-ге жететін қарапайым сорттар бар, құрылғының өткізу қабілеті өте қарапайым, оның шегі 3, 5 тонна. Бұл көрсеткіш жол талғамайтын көлікте жұмыс істеу үшін жеткілікті, бірақ мұндай құралмен ауыр көлікті көтеру мүмкін емес.

Сурет 1. 10 - Редуктивті көтергіш (Hydraulic winches HUCHEZ)
Стандартты конструкциядағы тісті көтергіш, айналмалы қозғалыстардың есебінен жұмыс істейді. Дизайн екі тісті көтеру механизмі бекітілген тіс кронштейніне негізделген. тұтқаның айналуы кішкентай редукторға беріледі, ол оны үлкен редукторға, содан кейін рельсте жібереді. Өлшемдердің айырмашылығына байланысты бірінші элементке әсер ететін күш ондаған есе артады және көп тонналы заттарды көтеруге мүмкіндік береді [4] .

Сурет 1. 11 - Редуктивті көтергіштің схемасы
Иілген тістері бар мылжың механизмді табан тірелгенге қарама-қарсы бағытта бұруды қоспағанда, жүктемені бекітуге жауап береді. Қысымды азайту үшін табан артқа қарай сүйенеді, бұл тұтқаның сағат тіліне қарсы бағытта қозғалуына мүмкіндік береді (1. 11-сурет) . Түсіру кезінде жүктің салмағы тұтқаны механизм арқылы итереді және кері айналуды тоқтату үшін күш қажет.
Әдетте түсуге арналмаған модельдер бар. Осы типтегі құрылғының тірек ұясы тек жүкті көтеру мен тіректерге бекітуді қамтиды. Айналмалы механизмдерден басқа, тетік механизмі, бір редуктор және тірек механизмі бар редукторлар бар. Мұндай көтергіштердің жұмысы қолдануға ұқсас, бірақ жоғары қарқындылықпен және тұтқаға аз қысыммен.
1. 3 Шахталық және консольді жүк көтергішШахталық - немесе жүк көтергіші әйнекте орналасқан (мысалы, лифтте) немесе жеке тірек құрылымында орнатылады (екеуі де матадан, металдан және басқа құрылыс материалдарынан жасалған), ал көтеру құрылғысы классикалық лифт болып табылады, бірақ классикалық желдің негізгі артықшылықтары мен технологиялық ерекшеліктерін сақтайды (1. 12-сурет) .
Тау көтергіштерінің құрылысы
Тау көтергіштерінің негізгі компоненттері:
- жүк бөлімі;
- жетек механизмі;
- қауіпсіздікті қамтамасыз етуге арналған жабдық;
- басқару жүйесі;
- жүк бөлімі.
Көтеру кабинасында тірек металл жақтау және болаттан жасалған қақпақ бар. Тастың құлап кетуіне жол бермеу үшін сынған ромбқа ұқсайтын жапырақ жасалды. Кабина өлшемдері 900x900x1400-4000x3600x3500 (ені, тереңдігі, биіктігі) стандартты ауқымынан таңдалады [5] .
Тор құрылымының түрлері:
- Тұтқиылды. Кіру және шығу үшін бір тесік;
- Өткел. Екі қарама-қарсы проекция;
- Бұрыш. Жасушаның көрші қабырғаларында орналасқан екі тесік.
... жалғасыСіз бұл жұмысты біздің қосымшамыз арқылы толығымен тегін көре аласыз.
- Іс жүргізу
- Автоматтандыру, Техника
- Алғашқы әскери дайындық
- Астрономия
- Ауыл шаруашылығы
- Банк ісі
- Бизнесті бағалау
- Биология
- Бухгалтерлік іс
- Валеология
- Ветеринария
- География
- Геология, Геофизика, Геодезия
- Дін
- Ет, сүт, шарап өнімдері
- Жалпы тарих
- Жер кадастрі, Жылжымайтын мүлік
- Журналистика
- Информатика
- Кеден ісі
- Маркетинг
- Математика, Геометрия
- Медицина
- Мемлекеттік басқару
- Менеджмент
- Мұнай, Газ
- Мұрағат ісі
- Мәдениеттану
- ОБЖ (Основы безопасности жизнедеятельности)
- Педагогика
- Полиграфия
- Психология
- Салық
- Саясаттану
- Сақтандыру
- Сертификаттау, стандарттау
- Социология, Демография
- Спорт
- Статистика
- Тілтану, Филология
- Тарихи тұлғалар
- Тау-кен ісі
- Транспорт
- Туризм
- Физика
- Философия
- Халықаралық қатынастар
- Химия
- Экология, Қоршаған ортаны қорғау
- Экономика
- Экономикалық география
- Электротехника
- Қазақстан тарихы
- Қаржы
- Құрылыс
- Құқық, Криминалистика
- Әдебиет
- Өнер, музыка
- Өнеркәсіп, Өндіріс
Қазақ тілінде жазылған рефераттар, курстық жұмыстар, дипломдық жұмыстар бойынша біздің қор #1 болып табылады.

Ақпарат
Қосымша
Email: info@stud.kz