Гексапод роботтарды Virtual Robotics Toolkit пен LEGO MINDSTORMS EV3 жүйелерінде датчиктерді интеграциялау, бағдарламалау және нәтижелерін көрсету

ҚАЗАҚСТАН РЕСПУБЛИКАСЫНЫҢ БIЛIМ ЖӘНЕ ҒЫЛЫМ МИНИСТРЛІГІ
ҚАЗАҚ ҰЛТТЫҚ ҚЫЗДАР ПЕДАГОГИКАЛЫҚ УНИВЕРСИТЕТІ
ФИЗИКА, МАТЕМАТИКА ЖӘНЕ ЦИФРЛЫҚ ТЕХНОЛОГИЯЛАР ЖОҒАРҒЫ МЕКТЕБІ
ЖОБАЛЫҚ ЖҰМЫС
Тақырыбы: Гексапод робаттар (Virtual Robotics Toolkit және LEGO MINDSTORMS Education EV3 программаларында роботторға қажетті датчиктерді қосып, программалап, нәтижесін көрсету)
Пән атауы: Білім берудегі робототехника және мехатроника
Мамандық атауы, курс: Информатика және робототехника, 2-курс
Орындаған: Жігерхан Сымбат
Тексерген: аға оқытушы Н. Х. Маметжанова
Алматы 2021
Мазмұны
Кіріспе
1. Lego Education Mindstorms EV3 бағдарламасына қысқаша түсінік
2. Гексапод робаттар
3. Гексапод робаттар (Virtual Robotics Toolkit және LEGO MINDSTORMS Education EV3 программаларында роботторға қажетті датчиктерді қосып, программалап, нәтижесін көрсету)
Қорытынды
Пайдаланылған әдебиеттер
Кіріспе
Қазіргі заманғы робототехниканың маңызды мәселелерінің бірі роботтар мен робототехникалық жүйелердің толық автоматтандыру және дербестігі болып табылады. Роботтың ерекшелігі - адамның қозғалысын және интеллектуалдық функцияларын ішінара немесе толық орындау қабілеті. Қарапайым автоматты жүйеден робот көп мақсаттықпен, үлкен әмбебаптықпен, әртүрлі функцияларды орындауға қайта құру мүмкіндігімен ерекшеленеді. Робот адам мүмкіндіктерінен тыс немесе адамның денсаулығы мен өміріне шамадан тыс қауіп төндірумен ұштасқан жағдайларда, сондай-ақ еңбекті көп қажет ететін циклдік қайталанатын міндеттерді орындау үшін кәсіби даярланған персоналдың жетіспеуінде адамды алмастыруға, орынын басуға арналған. Су, ауа, жер немесе ғарыш болсын, бізді қоршаған ортада қолданылатын түрлі бағыттағы мобильді роботтардың саны өте көп. Үлкен айырмашылықтарға қарамастан, барлық роботтардың жобалау кезінде сүйенуі қажет үш негізгі белгілері бар: а) Барлық роботтардың қойылған міндеттерді орындау үшін қажетті механикалық қасиеттерінің белгілі бір жиынтығы (форма, өлшем, қолданылатын материалдар және т. б. ) болады. б) Барлық роботтар электрондық компоненттердің белгілі бір жиынтығы бар. Бұл аспект қозғалыс (қозғалтқыштар арқылы), сезу (электр сигналдары жылу, дыбыс, энергияның жағдайы мен жай-күйі сияқты заттарды өлшеу үшін пайдаланылады) және басқару (роботтар, қозғалтқыштар мен датчиктерге берілетін электр энергиясының белгілі бір деңгейін қажет етеді, негізгі операцияларды іске қосу және орындау үшін) үшін қолданылады. в) Барлық роботтар компьютерлік бағдарламалық кодтың белгілі бір деңгейін қамтиды. Бағдарлама роботтың негізгі мәні болып табылады, өйткені бағдарламасыз робототехникалық жүйенің жұмыс қабілеттілігі мүмкін емес. Роботталған үш түрлі түрі бар бағдарламалар: қашықтықтан басқару, жасанды интеллект және гибрид. Арнайы жүйелер қойылған міндеттерді тікелей орындау үшін қызмет етеді. Арнайы жүйе технологиялық жабдықтың қажетті жиынтығынан тұрады, оның құрамы шешілетін міндет түрі мен мобильді роботтың тағайындалуымен анықталады. Мысалы, барлау міндеттерін шешу кезінде технологиялық жабдық датчиктер жиынтығы және ақпаратты бастапқы өңдеу құралдары болып табылады. Технологиялық міндеттерді орындау манипулятормен және оған ауысымды құрал жиынтығымен қамтамасыз етілуі мүмкін. Жарғыштехникалық жұмыстарды жүргізу кезінде жарғыш құрылғыларын диагностикалау құралдары және гидроразытқыштар қажетті жабдықтар болып табылады . Басқару жүйесі роботтың технологиялық жабдығының қозғалысын және жұмысын басқаруды, сондай-ақ көлік жүйесінің қоршаған ортамен өзара ісқимылын ескере отырып, жүріс бөлігі мен энергетикалық қондырғыны бейімдеуді қамтамасыз етеді. Басқару жүйесі мобильді роботта орналасқан ақпараттық-басқару бөлігін (роботты басқару аппаратурасы, датчиктер, техникалық көру жүйесі және ақпаратты алдын ала өңдеу микропроцессорлары) ; мобильді робот операторының посты (пультті басқару, бейне тексеру құрылғылары) және ақпаратты роботтан оператор бекетіне және басқарушы командаларға постооператордан мобильді роботқа беруді қамтамасыз ететін қабылдау-тарату аппаратурасының жиынтығын қамтиды. Қозғалысты басқару жүйесі сондай-ақ техникалық сезім органдарынан және навигациялық жүйеден басқару жүйесіне үздіксіз келіп түсетін ақпаратты ескере отырып, картографиялық база негізінде өзгермейтін жағдайларда қозғалысты жоспарлауды қамтамасыз етуі тиіс.
1. Lego Education Mindstorms EV3 бағдарламасына қысқаша түсінік
Lego Education Mindstorms EV3 - бұл оқу орындары үшін арнайы әзірленген білім беру робототехника платформасы. Оның көмегімен студент бірінші сабақта өзінің алғашқы роботын жасай алады. EV3 негізіндегі оқу бағдарламасы бүкіл орта мектепке арналған және оны жоғары сынып оқушылары үшін пайдалануға болады.
Мұғалімдер мен студенттерге арналған ойластырылған оқу материалдарымен Mindstorms балаларға арналған батыстық робототехника сабақтарының стандартына айналды және робототехника сыныптарын жабдықтаудың ең танымал шешімі болып табылады.
Барлық бөлшектердің беріктігі жоғарылады және тиісті түрде пайдаланған кезде жинақ 10 оқу жылынан астам өмір сүре алады. Ал сенсорлардың немесе қосылатын сымдардың біреуі зақымдалған жағдайда оларды бөлек сатып алуға болады.
Платформаның миы экраны және енгізу-шығару порттары бар EV3 бағдарламаланатын микрокомпьютер болып табылады, ол қозғалтқыштар мен сенсорлардың жұмысын басқарады. Платформаның құрамдас бөліктері жинақтағы арнайы кабельдермен қосылады.
Датчиктердің көмегімен робот айналасындағы әлемді қабылдайды, ал қозғалтқыштардың арқасында оған белгіленген бағдарламаға сәйкес әрекет етеді.
Mindstorms EV3 сериясының жинақтарының құрылымы
EV3 платформасы Mindstorms EV3 Core жиынтығынан және 5 қосымша жиынтықтан (үшеуі Lego-дан және екеуі Tetrix-тен) тұрады. Қосымша жинақтармен жұмыс істеу үшін негізгі жинақ қажет.
Ол барлық қосымша жинақтардың негізі болып табылады, өйткені оның құрамында EV3 микрокомпьютері, негізгі сенсорлар, қозғалтқыштар және қосымша жинақтар нұсқауларынан күрделі үлгілерді құруға қажетті құрылыс элементтері бар. Роботтардың 5 үлгісін құрастыруға арналған.
EV3 негізгі жинағына мыналар кіреді: әртүрлі қуаттылықтағы 3 сервоқозғалтқыш (2 үлкен және 1 орташа), 5 сенсор (гиро және ультрадыбыстық сенсор, жарық/түс сенсоры және 2 сенсорлық сенсор), қайта зарядталатын батарея және қосу сымдары.
LEGO Mindstorms EV3 негізгі жинағы


LEGO Mindstorms бағдарламалық құралы
Біз аппараттық база туралы көп айттық, бірақ шын мәнінде робототехника сабақтарының тиімділігін анықтайтын ол ғана емес. Бұл барлық танымал платформаларда (Windows, MacOS, iOS) пайдалануға қол жетімді шын мәнінде интуитивті бағдарламалық қамтамасыз етудің және LEGO Mindstorms Education EV3-ті білім берудегі ең танымал платформаға айналдыратын дайын оқу бағдарламаларының болуы, әсіресе бастауыш және орта мектептің кезегі. , шамамен 10 балаға арналған.
LEGO Mindstorms үшін LME EV3 бағдарламалық құралы тегін және мыналарды қамтиды: қадамдық құрастыру нұсқаулары бар 48 интерактивті сабақ, мұғалім мен оқушының оқу материалдары, стандартты робот үлгілерін құру және бағдарламалау нұсқаулары.
2. Гексапод роботтар
Гексапод (латын тілінен hexapod - алты аяқты) - қозғалысты басқаруға арналған жүйе. Ұзындығы реттелетін алты тірек аяғының болуы алты аяқты үш ось бойымен бір уақытта жылжытуға мүмкіндік береді, бұл ретте оны үш айналу осіне айналдырады (параллель кинематика деп аталады) . Бұл қозғалатын жүкті немесе дайындаманы өте дәл орналастыруға мүмкіндік береді. Гексаподтар әртүрлі салаларда, атап айтқанда өлшеу технологиясында қолданылады. Гексаподтарды орындауға арналған дизайн нұсқаларының диапазоны, олардың параметрлері және т. б. өте кең.
Өлшеу технологиясында алтыаяқтылар қандай рөл атқарады?
Өлшеу технологиясында гексаподтар, күш түрлендіргіштерін немесе момент түрлендіргіштерін калибрлеу үшін қолданылады, мысалы, дөңгелектерге әсер ететін күштердің түрлендіргіштерін өлшеу. Әдетте, екі алтыаяқты бір мезгілде қолданылады, жылжымалы және қозғалмайтын. Бақылау үшін жылжымалы алтыаяқты қолданылады, ал калибрлеуге қажетті шамалардың анықтамалық мәндерін алу үшін бекітілген алтыаяқты қолданылады. Басқару құрылғысы сынақ бөлігінің берілген бақылау нүктесіндегі күштер мен моменттерді реттейді. Жеке еркіндік дәрежесін үздіксіз бақылау тіпті позицияны немесе күшті өлшеу арқылы аралас түрде де жүзеге асырылуы мүмкін.
Гексапоттар қай жерде қолданылады?
Станоктарда бөлшектерді жылжытуға арналған құрылғы ретінде Көлік құралдары мен ұшақтарды әзірлеуде, сондай-ақ темір жол техникасында (нақты қозғалыс симуляторлары) Өлшеу технологиясында калибрлеу стенді ретінде Нақты орналастыру үшін, мысалы, робототехникада және автоматика құрылғыларында Медицинада технология Материалды тестілеуде Киноиндустрияда жылжымалы платформа ретінде.
Дизайын
Гексапоттар конструкциялары аяқтың орналасуында әртүрлі. Жәндіктерден шабыттанған роботтар әдетте Карнеги Меллондағы RiSE роботы сияқты бүйірлері симметриялы болады. Радиалды симметриялы алтыаяқты JPL-дегі ATHLETE роботы болып табылады. Әдетте, жеке аяқтар екіден алтыға дейінгі еркіндік дәрежесін алады. Алты бұрышты аяқтар әдетте үшкір болады, бірақ оларды қабырғаларға немесе дөңгелектерге өрмелеуге көмектесу үшін жабысқақ материалмен жабыстыруға болады, осылайша робот жер тегіс болған кезде жылдам қозғала алады.
Қозғалыс
Көбінесе алты аяқтылар роботтың алға жылжуына, бұрылуына және мүмкін жағына қарай қадам басуына мүмкіндік беретін жүрістермен басқарылады. Кейбір жиі кездесетін жүрістерге мыналар жатады:
Штативтерді ауыстыру: бір уақытта 3 фут жерде.
Төрт аяқты.
Кроль: бір уақытта тек бір аяқты жылжытыңыз.
Алтыаяқтылардың жүрісі аздап жартасты және тегіс емес жерлерде де тұрақты болады.
Қозғалыс қадағаланбауы да мүмкін, бұл аяқ қозғалыстарының реттілігі түсірілмейді, бірақ қабылданатын ортаға жауап ретінде компьютермен таңдалады. Бұл өте жартасты жерлерде пайдалы болуы мүмкін, бірақ қозғалысты жоспарлаудың қолданыстағы әдістері есептеуді қажет етеді.
Биологиялық шабыттандырылған
Үлгі ретінде жәндіктер таңдалды, өйткені олардың жүйке жүйесі басқа жануарлар түрлеріне қарағанда қарапайым. Сонымен қатар, күрделі мінез-құлықты тек бірнеше нейрондарға жатқызуға болады, ал сенсорлық кіріс пен қозғалтқыштың шығуы арасындағы жол салыстырмалы түрде қысқа. Роботтардың қозғалысын жақсарту үшін жәндіктердің жүруі және нейрондық архитектура қолданылады. Керісінше, биологтар әртүрлі гипотезаларды тексеру үшін алты аяқты роботтарды пайдалана алады.
Биологиялық алты аяқты роботтар үлгі ретінде пайдаланылатын жәндіктердің түріне өте тәуелді. тарақан және таяқша жәндік - ең жиі қолданылатын жәндіктердің екі түрі; екеуі де этологиялық және нейрофизиологиялық тұрғыдан мұқият зерттелген. Қазіргі уақытта толық жүйке жүйесі белгісіз, сондықтан модельдер әдетте әртүрлі жәндіктердің модельдерін, соның ішінде басқа жәндіктердің үлгілерін біріктіреді.
Жәндіктердің жүруіне әдетте екі тәсілмен қол жеткізіледі: орталықтандырылған және орталықтандырылмаған басқару архитектурасы. Орталықтандырылған контроллерлер барлық тармақтардың ауысуын тікелей анықтайды, ал орталықтандырылмаған архитектураларда алты түйін (тармақтар) параллель желіге қосылады; Жүріс көршілес аяқтардың өзара әрекеттесуінен пайда болады.
3. Гексапод робаттар (Virtual Robotics Toolkit және LEGO MINDSTORMS Education EV3 программаларында роботторға қажетті датчиктерді қосып, программалап, нәтижесін көрсету)
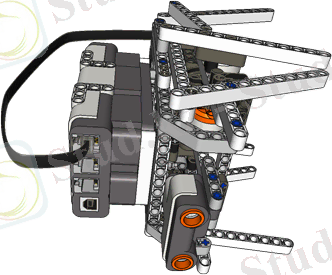
Бұл қарапайым алты аяқты робот тек бір мотор арқылы жүре алады және кері айнала алады. Ол ультрадыбыстық сенсор арқылы кедергілерді анықтай алады. Бағдарламалау өте қарапайым: робот ультрадыбыстық сенсор өлшегіш жақын маңдағы нысанды анықтағанша алға қадам жасайды, содан кейін ол қозғалтқыш бағытын өзгертеді және ақылды механизм тек бір қатар аяқты жүргізіп, артқа бұрылу маневріне мүмкіндік береді. Оң жақта сіз трюк жасайтын механизмді көре аласыз.
Био-шабытталған алты аяқты робот, алты аяқты роботты модельдеу, максималды түйісу бұрыштары бар нақты робот. Қысқартулар: TL, CL және FL = сол аяқтың Tx, Cx және Fx буындары; TR, CR және FR = оң аяқтың Tx, Cx және Fx буындары; және 1, 2 және 3 = тиісінше алдыңғы, ортаңғы және артқы аяқтар.
Гексапоттың техникалық параметрлері
Сипаттамалық мән
Ажыратымдылық сызықтық, ең азы 1 мкм-ден 0, 1 мм-ге дейін
Бұрыштық ажыратымдылық, минимум 1 доға секундынан
Қос бір бағытты қозғалыстың қайталануы 2 микроннан
Арнайы дизайндағы сызықтық қозғалыс диапазоны 5 мм-ден 0, 5 м-ге дейін және одан да көп
Максималды сызықтық қозғалыс жылдамдығы 0, 2 мм / с - 1, 5 м / с
Максималды бұрыштық қозғалыс жылдамдығы 0, 2-ден 200 градус / с дейін
Максималды бұрыштық қозғалыс жылдамдығы 0, 0001 градус/с
Арнайы нұсқада максималды пайдалы жүк салмағы 1-ден 300 кг-ға дейін немесе одан да көп
Максималды қуат тұтынуы 10 Вт-тан 45 кВт-қа дейін.


Қорытынды
Жобада кедергіні айналып өтетін автоматтандырылған басқару жүйесі бар машинаны жасау қарастырылған. Навигация міндеті мобильді робототехниканың негізгі проблемасы болып қалады, бұл жұмыс кеңістігіндегі мобильді роботтың жағдайын анықтауды білдіреді - қоршаған ортаны оқшаулау және ұсыну, сипаттау. Роботтың ағымдағы жағдайы туралы ақпарат басқарудың көптеген мәселелерін шешу үшін қажет: берілген траекториядан өту, берілген нүктеге жолды іздеу, бастапқы жағдайға оралу. Көбінесе карта немесе жергілікті жердің жоспары түрінде ұсынылатын қоршаған әлем туралы ақпарат жүріп өткен маршрутты есте сақтау, статикалық кедергілерді айналып өту траекториясын жоспарлау, динамикалық объектілерді бақылау үшін қажет. Мобильді автономды роботтар әрдайым өз міндеттерін орындауға, оларда орнатылған сенсорлардан ақпаратты үнемі алуға және өңдеуге көшуі тиіс. Қарапайым мобильді роботтар келесі компоненттерге ие: контроллер, датчиктерді бағдарламалық қамтамасыз ету және атқарушы тетіктер. Контроллер, әдетте, микропроцессор, кіріктірілген микроконтроллер немесе дербес компьютер. Машина берілген траекториялар бойынша қозғалуға, қысқа маршрутты іздеуге, сондай-ақ кедергілерді айналып өтуге қабілетті. Атап айтқанда, екі дифференциалды жетектері және бір тірек дөңгелегі бар мобильді робот қарастырылады. Жұмыс барысында траекторияны жоспарлау және екі доңғалақты мобильді роботтың қозғалысын басқару жүйесі ретінде қолданылуы мүмкін бағдарламалық құралдар жиынтығы алынды. Кедергілерді айналып өтетін автоматты түрде басқарылатын машинаны бағдарламалық қамсыздандыру барысында LEGO MINDSTORMS Education EV3 бағдарламалау ортасы қолданылды. Жұмыстың мақсаты интеллектуалды алгоритмді қолдану есебінен кедергілері бар жұмыс кеңістігіндегі мобильді роботтың физикалық қозғалысының тиімділігін арттыру болып табылады. Қазіргі заманғы мобильді робот техникасының негізгі үрдісі телебасқару жүйелерінен роботтың барлық іс-қимылдарын орындау үшін адамның тікелей қатысуын талап ететін автономды жүйелерге көшу болып табылады, онда оператор тек соңғы және аралық мақсаттарды көрсетеді.
... жалғасыСіз бұл жұмысты біздің қосымшамыз арқылы толығымен тегін көре аласыз.
- Іс жүргізу
- Автоматтандыру, Техника
- Алғашқы әскери дайындық
- Астрономия
- Ауыл шаруашылығы
- Банк ісі
- Бизнесті бағалау
- Биология
- Бухгалтерлік іс
- Валеология
- Ветеринария
- География
- Геология, Геофизика, Геодезия
- Дін
- Ет, сүт, шарап өнімдері
- Жалпы тарих
- Жер кадастрі, Жылжымайтын мүлік
- Журналистика
- Информатика
- Кеден ісі
- Маркетинг
- Математика, Геометрия
- Медицина
- Мемлекеттік басқару
- Менеджмент
- Мұнай, Газ
- Мұрағат ісі
- Мәдениеттану
- ОБЖ (Основы безопасности жизнедеятельности)
- Педагогика
- Полиграфия
- Психология
- Салық
- Саясаттану
- Сақтандыру
- Сертификаттау, стандарттау
- Социология, Демография
- Спорт
- Статистика
- Тілтану, Филология
- Тарихи тұлғалар
- Тау-кен ісі
- Транспорт
- Туризм
- Физика
- Философия
- Халықаралық қатынастар
- Химия
- Экология, Қоршаған ортаны қорғау
- Экономика
- Экономикалық география
- Электротехника
- Қазақстан тарихы
- Қаржы
- Құрылыс
- Құқық, Криминалистика
- Әдебиет
- Өнер, музыка
- Өнеркәсіп, Өндіріс
Қазақ тілінде жазылған рефераттар, курстық жұмыстар, дипломдық жұмыстар бойынша біздің қор #1 болып табылады.

Ақпарат
Қосымша
Email: info@stud.kz