Автоматты реттеу жүйесін талдау және синтездеу

Қaзaқстaн Республикaсының Білім және Ғылым министpлiгi
М. Қoзыбaев aтындaғы Сoлтүстiк Қaзaқстaн мемлекеттiк унивеpситетi
Инженерлік және сандық технологиялар факультеті
Энергетика және радиоэлектроника кафедрасы
«Автоматика негіздері» пәні бойынша
Курстық жұмыс
Тақырыбы:«Автоматты реттеу жүйесін талдау мен синтездеу»
Орындаған: Баембаев А. Х
Жетекші: Айтулина А. М
Петропавл 2020
М. Қозыбаев атындағы Солтүстік Қазақстан университеті
Инженерлік және сандық технологиялар факультеті
Энергетика және радиоэлектроника кафедрасы
Курстық жұмыс/ жобалау бойынша
тапсырманың №3
Тобының оқушысы: ЭЭ-19К Мамандығы: Электр энергетикасы
Аты-жөнi: Баембаев Асет Ханатович
Жұмыстың/ жобаның жетекшiсi: Айтулина Айжан Мингожановна
Жобалаудың мерзiмi: 26. 01. 2021 бастап 13. 04. 2021 дейiн
1. Курстық жобаның тақырыбы: Автоматтық реттеу
2. Жұмыс/ жобаның мазмұны (қандай графикалық жұмыстар мен есептер орыдалуы қажет) :
Кіріспе.
1. Автоматты басқару жүйесінің режимдерін зерттеу
2. Жабық жүйелердің берілу функциясын анықтау
3. Жиілік сипаттамаларын зерттеу
4. АБЖ-ның уақытша сипаттамалары
5. АБЖ тұрақтылығын зерттеу
Қорытынды
3. Курстық жұмыстың/ жобаның орындалу жоспары
- Курстық жұмыс/ жоба аяқталды «» 20 ж.
- Жұмыс/ жобаның бағасы
- Тапсырманы қабылдаған оқушы «» 20 ж.
Жетекшi «» 20ж.
Бекiтемiн: кафедра меңгерушiсi «» 20
МАЗМҰНЫ
Кіріспе4
1 Автоматтандырылған басқару жүйесінің режимдерін зерттеу6
1. 1 Тұйық жүйенің трансфер функциясын анықтау6
1. 2 Логарифмдік амплитудалық жиілік сипаттамаларын құру. 7
1. 3 Логарифмдік фазалық жиілік сипаттамасын құру9
1. 4 АБЖ-ның уақыт сипаттамалары9
2 AБЖ тұрақтылығын зерттеу. 12
2. 1 Раус-Гурвиц тұрақтылық критериі. 13
2. 2 Найквист тұрақтылық критериі. 14
Қорытынды17
Пайдаланылған әдебиеттер тізімі20
КІРІСПЕ
Автоматты басқару (АБЖ) жүйелері басқару объектісіндегі жекелеген параметрлерді (температура, қысым, деңгей, Шығыс және т. б. ) реттеу үшін қолданылады. Қазіргі заманғы автоматты басқару жүйелерінде (АБЖ) автоматты басқару жүйелері АБЖ ішкі жүйелері болып табылады және олар объектіні немесе процесті басқару кезінде әртүрлі параметрлерді реттеу үшін қолданылады.
Кез-келген автоматты басқару жүйесінің (АБЖ) жұмыс принципі-объектінің жұмысын немесе процестің қажетті режимнен өтуін сипаттайтын реттелетін шамалардың ауытқуларын анықтау және сонымен бірге объектіге немесе процеске осы ауытқуларды жою үшін әсер ету.
Автоматты басқару жүзеге асыру үшін реттелетін объектіге автоматты реттегіш қосылады, ол реттеуші органға басқару әсерін жасайды. Бұл басқару әсерін контроллер сенсормен өлшенетін реттелетін шаманың ағымдағы мәні (температура, қысым, сұйықтық деңгейі және т. б. ) мен оның орнатушы орнатқан қажетті мәні арасындағы айырмашылыққа байланысты шығарады. Реттелетін объект пен автоматты реттегіш бірге автоматты басқару жүйесін құрайды.
АБЖ-ның негізгі белгісі-негізгі кері байланыстың болуы, ол арқылы реттеуші реттелетін параметрдің мәнін басқарады.
1 Автоматтандырылған басқару жүйесінің режимдерін зерттеу
- Тұйық жүйенің трансфер функциясын анықтау
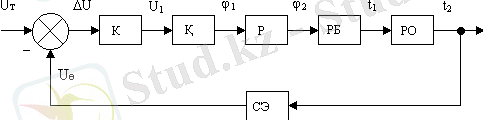
Сурет 1. 1 - Температураны реттеу жүйесінің функционалды схемасы
1-суретте келесі белгілер көрсетілген:
РО - реттелетін объект;
РБ - реттеуші бөлім;
Р - редуктор;
Қ - қозғалтқыш;
К- күшейткіш;
СЭ - сезімтал элемент;
U Т -тірек кернеуі;
U 1 - қозғалтқыштың кіріс кернеуі;
U Ө - өлшенген кернеу
∆U - кернеу ауытқуы;
ϕ 1 - қозғалтқыш валының айналу бұрышы;
ϕ 2 - редуктивтік валының айналу бұрышы;
t 1 - басқару объектісінің кірісіндегі температура;
t 2 - температура.
Кесте 1 - Температураны реттеу жүйесі үшін параметрлер мәні
- К күшейткішінің теңдеуі:
U 1 = k 4 ∙∆U (1. 1)
2. Қ+Р қозғалтқыш пен редуктордың теңдеуі:
(1 + T 2 p) ∙pϕ 2 = k 3 U 1 (1. 2)
3. РБ реттеуші бөлімінің теңдеуі:
t 1 = k 2 ϕ 2 (1. 3)
4. РО реттелетін обьектінің теңдеуі:
(1 + T 1 p) t 2 = k 1 t 1 p, (1. 4)
мұндағыT 1 - РО реттелетін обьектінің уақыт константасы; k 1 - өткізгіштік коэффициент.
5. СЭ сезімтал элементінің теңдеуі:
U Ө = k 5 ∙t 2 (1. 5)
W1(p)
 (1. 6)
(1. 6)
(1. 7)
W3(p) 3 (1. 8)
W4(p) (1. 9)
W5(p) (1. 10)
Осы жүйеде (1. 1-сурет) кері байланыс бар болғандықтан, жалпы трансфер функциясы келесідей есептеледі:
W Ж (1. 11)
Бөлгіште «+» белгісі теріс кері байланысқа сәйкес келеді.
Әлсіреу коэффициентінің
 мәніне қарай бөлік тербелмелі(0<
ξ
<1), консервативті (
ξ
=0) және екінші ретті апериодты (
ξ
≥1) бола алады.
мәніне қарай бөлік тербелмелі(0<
ξ
<1), консервативті (
ξ
=0) және екінші ретті апериодты (
ξ
≥1) бола алады.
ξ=Т 2 /2Т 1,
екінші ретті апериодты, себебі 0< ξ <1
1. 2 Логарифмдік амплитудалық жиілік сипаттамаларын құру
Жиіліктік сипаттамалар кірістегі гармоникалық әсерден туындаған бөліктің шығуындағы тұрақты күйдегі мәжбүрлі тербелістерді сипаттайды. Тұрақты жүйелерде гармоникалық әрекеттермен, өтпелі процестің аяқталуынан кейін, шығыс мәні гармоникалық заң бойынша да өзгереді, бірақ амплитудасы мен фазасы өзгеше болады. Демек, амплитудалық жиілік сипаттамасы амплитудалардың арақатынасының өзгеруін көрсетеді, ал фазалық жиілік сипаттамасы - кіріс гармоникалық әсерінің жиілігіне байланысты кіріс жиілігіне қатысты шығыс мәнінің фазалық жылжуы болып табылады.
Тербелмелі бөліктің асимптоталық логарифмдік амплитудалық жиілік сипаттамасы (ЛАЖС) мына түрге ие:
20lgk, егерω<ω 1
20 lgk-40lgT 1 ω, егер ω≥ ω 1 ,
(1. 12)
L(ω) ≈
Мұндағы ω 1 =1/T 1 , ω 1 - біріктірілген жиілік, асимптоталардың түйісу нүктесі. Бірінші асимптота, егер ω<ω 1 орындалса, жиілік осіне параллель болып табылады, ал екіншісі, егер ω≥ ω 1 орындалса, 40 дБ/декбұрышқа ие.
Бірінші асимптотаның бастапқы нүктесін табайық: 20lgk=20lg0, 5=-13. 86 . Біріктірілген жиілік ω 1 =1/T 1 =1/20=0, 05; lg(ω 1 ) =-1, 30. Осылайша, -14 нүктесінен бірінші, жиілік осіне параллель тік асимптота жүргіземіз. ω 1 =-1, 17 нүктесінде логарифмдік сипаттамалар үзіледі, содан кейін -40 дБ/дек бұрышпен екінші асимптота басталады (сурет1. 2) . Абсциссада тікелей lg ω немесе жиіліктің мәндері ω көрсетіледі. Бірінші жағдайда lg ω индексі жиіліктің 10 есе өзгеруіне сәйкес келетін ондық болып табылады. Ординат осінде сигнал қуатыныңкоэффициенті ондық логарифмде белгіленеді, оның өлшем бірлігі децибел болып табылады.
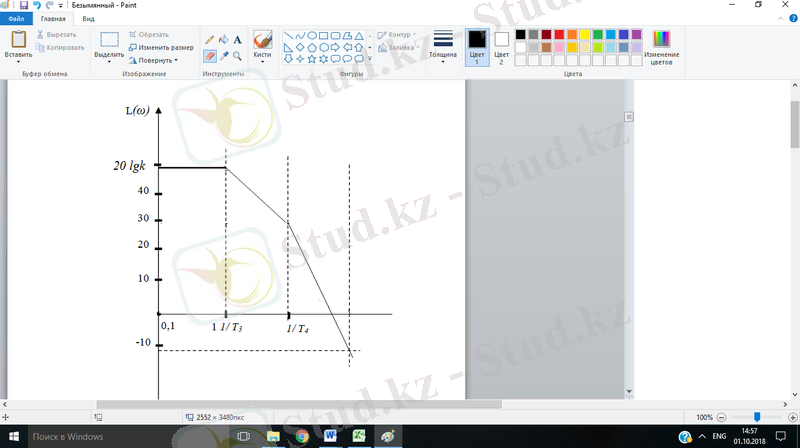
Сурет 1. 2 - Тербелмелі бөліктің амплитудалық жиілік сипаттамасы.
1. 3 Логарифмдік фазалық жиілік сипаттамасын құру

Тербелмелі бөліктің логарифмдік фазалық жиілік сипаттамасы (ЛФЖС) 0 мен -π аралығында монотонды өзгереді және келесі формула арқылы анықталады:
 (1. 13)
(1. 13)
φ(ω) =
ЛФЖС, ω→0 болғанда, асимптота бойыменжиілік осіне ұмтылады, ал ω→∞ болғанда - φ =-π-ге.
Сипаттаманы (сурет 1. 3) салу үшін кесте 2 қолданамыз, бұл кестеде ω жиіліктің мәндері жазылған және формула (1. 13) арқылы φ фазаның сәйкес мәндерін табамыз. Сонымен қатар уақыт қалады, яғни Т 1 =20, Т 2 =0, 4 .
1. 4 АБЖ-ның уақыт сипаттамалары
Автоматты жүйелердің (бөліктердің) маңызды сипаттамасы - өтпелі және импульстік өтпелі функциялары және олардың графиктары - уақыт сипаттамалары.
Жүйенің (бөліктің) өтпелі функциясы - жүйенің(бөліктің) шығу мәнінің өзгеруін сипаттайтын функция, нөлдік бастауыш жағдайында оның бір қадамдық әрекеті қолданылады. Басқа сөзбен айтқанда, h(t) өтпелі функциясыжүйенің (бөліктің) нөлдік бастапқы шарттарындағы бір қадамдық әрекетке жауапты сипаттайды.
Тербелмелі бөліктің өтпелі функциясы мынаған тең:
 (1. 14)
(1. 14)
мұндағы
 = -1, 1,
= -1, 1,
 =1, 24 .
=1, 24 .
Тербелмелі бөліктің берілген параметрлерін қойып k=0, 3, Т 1 =0, 6, Т 2 =0, 8 келесі өрнекті аламыз:
h(t) функция - зерттелетін автоматты жүйенің өтпелі сипаттамасы, бұл сипаттаманың графигін салу үшін (сурет 1. 4) кесте 3 қолданылады.
Кесте 3 - Автоматты жүйенің өтпелі сипаттамасын салуға арналған мәндер
Жүйенің (бөліктің) импульстік өтпелі немесе салмақтық функциясы нөлдік бастапқы шарттарда жүйенің (бөліктің) бір импульстік әрекетке жауап беретін функция болып табылады.
Салмақтық және өтпелі функциялар келесідей байланысты:
ω (t) =h(t) ' (1. 15)
Осылайша, өрнекті дифференциалдап (1. 14), біз тербелмелі бөліктің салмақтық функциясын таба аламыз.
 . (1. 16)
. (1. 16)
Импульстік сипаттаманы (сурет 1. 5) құру үшін кесте 4 қолданамыз.
Кесте 4 - Импульстік сипаттаманы салуға арналған мәндер
Сурет 1. 5 - Тербелмелі бөліктің салмақтық сипаттамасы.
- AБЖ тұрақтылығын зерттеу
Динамикалық басқару жүйелерін талдаудың маңызды міндеті-олардың тұрақтылығы туралы мәселені шешу. Автоматты басқару жүйелерінің тұрақтылығының техникалық тұжырымдамасы техникалық жүйенің қалыпты режимдерде тұрақты жұмыс істеу қасиетін ғана емес, сонымен қатар жүйенің барлық параметрлерінің номиналдан ауытқуымен және тұрақсыздандыратын әсер ету жүйесіне әсер етуімен, яғни жүйеде тепе-теңдік күйіне оралу қабілетінің болуы немесе болмауы көрсетеді. ол бұзушы немесе басқарушы әсерлерден туындайды. Жүйенің тұрақтылығы-бұл өздігінен жүретін зеңбіректердің сапасы мен дәлдігіне байланысты күрделі талаптар қатарындағы қарапайым техникалық талап. Тұрақтылық қасиеті сандық көрсеткіштермен көрсетілуі мүмкін, оларды есептеуге болады және жүйенің сапасы мен дәлдігінің басқа көрсеткіштерімен байланысты.
Сызықтық жүйенің тұрақтылығы бұзылыстың сипатымен емес, жүйенің құрылымымен анықталады. Егер тұрақтылықтың болу фактісі анықталса, бірақ оның шекаралары анықталмаса, жүйе "кішігірім" тұрақты деп айтылады. Жүйе тұрақтылықтың шекаралары анықталған кезде және нақты ауытқулар осы шекаралардан шықпайтын кезде "үлкен" тұрақты болады. Тиісінше, жүйелерді тұрақтылыққа зерттеу міндеті екі жолмен қойылуы мүмкін:
1) жүйе параметрлерінің берілген мәні кезінде тұрақты ма;
2) жүйенің параметрлерін оның тұрақтылығын бұзбай қай диапазонда өзгертуге болады.
2. 1 Раус-Гурвиц тұрақтылық
Бұл критерийді математик А. Гурвиц 1895 жылы тұжырымдаған, ол алгебралық және сипаттамалық теңдеудің түбірлерінің орналасуын оның коэффициенттеріне сәйкес келетін белгілі бір шарттармен байланыстырады.
Алдымен сипаттамалық теңдеудің коэффициенттерінен (4. 11) келесі ереже бойынша Гурвиц матрицасы жасалады: негізгі диагональда жоғарыдан төменге дейін, бірақ ап-дан я-ға дейінгі сипаттамалық теңдеудің коэффициенттері жазылады. Диагональдан төмен әр бағанда р операторының жоғарылау дәрежелері бар коэффициенттер жазылады, жоғары-р дәрежелерінің төмендеуімен. бағандағы жетіспейтін элементтер нөлдермен толықтырылады.
Нәтижесінде біз форманың квадрат матрицасын аламыз
n = 2 үшін
 (1. 21)
(1. 21)
Тұрақтылық шарттары:
a 0 > 0; a 1 > 0; a 2 > 0 (1. 22)
(соңғы теңсіздік теңсіздікті азайтады ∆ 2 > 0 , егер бұрынғы теңсіздікті ескерсек, a1> 0) .
Мысалы, трансфер функциясымен k / (T21s + T2s + 1) байланысы, кезектегі барлық терминдердің алдындағы қосу белгісі болса тұрақты болады.
... жалғасыСіз бұл жұмысты біздің қосымшамыз арқылы толығымен тегін көре аласыз.
- Іс жүргізу
- Автоматтандыру, Техника
- Алғашқы әскери дайындық
- Астрономия
- Ауыл шаруашылығы
- Банк ісі
- Бизнесті бағалау
- Биология
- Бухгалтерлік іс
- Валеология
- Ветеринария
- География
- Геология, Геофизика, Геодезия
- Дін
- Ет, сүт, шарап өнімдері
- Жалпы тарих
- Жер кадастрі, Жылжымайтын мүлік
- Журналистика
- Информатика
- Кеден ісі
- Маркетинг
- Математика, Геометрия
- Медицина
- Мемлекеттік басқару
- Менеджмент
- Мұнай, Газ
- Мұрағат ісі
- Мәдениеттану
- ОБЖ (Основы безопасности жизнедеятельности)
- Педагогика
- Полиграфия
- Психология
- Салық
- Саясаттану
- Сақтандыру
- Сертификаттау, стандарттау
- Социология, Демография
- Спорт
- Статистика
- Тілтану, Филология
- Тарихи тұлғалар
- Тау-кен ісі
- Транспорт
- Туризм
- Физика
- Философия
- Халықаралық қатынастар
- Химия
- Экология, Қоршаған ортаны қорғау
- Экономика
- Экономикалық география
- Электротехника
- Қазақстан тарихы
- Қаржы
- Құрылыс
- Құқық, Криминалистика
- Әдебиет
- Өнер, музыка
- Өнеркәсіп, Өндіріс
Қазақ тілінде жазылған рефераттар, курстық жұмыстар, дипломдық жұмыстар бойынша біздің қор #1 болып табылады.

Ақпарат
Қосымша
Email: info@stud.kz