Мартен пештерін жүктеуге арналған рельсті аудару машинасының қозғалыс механизмінің динамикалық және математикалық моделін құру

КІРІСПЕ
Машиналар жұмыс істеу кезінде олардың механизмдерінің буындарында нақты пайда болатын жүктемелерді анықтау үшін айтылған механизмдерінің динамикалың моделдерін құру керек және олардың қозғалыстарының математикалық өрнектермен жазу (математикалық модель) .
Динамикалық модель - теориялық зерттеулерде және инженерлік есептеулерде қолданылатын, қарастырылатын механикалық жүйенің дәріптелген кескіні (есептеу сұлбасы) .
Жалпы айтқанда динамикалық модель өз тұрғысынан қарастырылып отырған механикалық жүйенің айтылған параметрлерімен, белгіленген өлшемдерімен механизмнің қарапайым есептік нұсқасын ұсынады. Параметрлерді басқаша теңдеудегі өлшемдер және динамикалық моделдің келтірушісі ретінде өрнектеуге болады. Математикалық модель дәстүрлі өз тұрғысынан келтірілген динамикалық моделге қатысты қарастырылынған механикалық жүйесінің қозғалысының дифференциалды теңдеулерінің жүйесі деп көрсетіледі. Дифференциалдық теңдеулер саны, өз тұрғысынан жалпылама координаттар жүйесіне тең, және келтірілген динамикалық моделмен анықталады. Зерттеліп жатқан жүйенің параметрлерін геометриялық және физикалық деп бөлуге болады. Геометриялық параметрлерге мына шамаларды жатқызуға болады. Олар: ұзындық және біліктің диаметрі, машинаның доңғалағының диаметрі, инерция моментінің қимасы, бұралуға(полярлық) және иілуге(өстік) қарсы моменттер және басқада шамалар. Негізінде тұрақты шамалар беріледі, немесе оңай анықталады.
Физикалық параметрлер: массалар, күштер және олардың моменттері инерция моменттерінің массасы, серпімді звенолардың қатаңдығы, серпімді байланыстардың қатаңдығы, сырғанау үйкелісі мен тербелістің коэффициенттері. Физикалық параметрлер тұрақты және өзгермелі бола алады. Өзгермелі параметрлерге келесі мысалдарды келтіреміз. Үйкеліс коэффициенті (f 0 ) жоқ және сырғанау үйкелісі (f k ) , мысалы “доңғалақ-рельс” (болат үшін f 0 = 0. 25, f k = 0. 15) . Арқалықтың (біліктің) өзгермелі көлденең қимасында инерция моментінің қимасы арқалықтың өне бойында болмайды және оны анықтау үшін инерция моментінің ара қашықтықтан функцияналды тәуелсіздігін келтіру керек. Параметрдің өзгеруі жүкті тиеп-түсіретін құрылғылардың массаларының өзгеруін анықтайды. Механикалық жүйедегі массалар өзгерісінің әсерін анықтау үшін теңдеу құру қажет, уақытқа тәуелді массаның өзгеруін анықтайтын және осы теңдеуді сәйкесінше дифференциалды теңдеуге енгізу керек. Кей жағдайларда серпімді элементтердің қатаңдығы өзгермелі параметр бола алады.
Геометриялық параметрлер физикалық параметрлерді анықтауда қолданылады. Мысалы, білікттердің, арқалықтардың, доңғалақтардың диаметрлерінің массаларын инерция моментінің иілу мен бұралу қатаңдығы анықталады.
Берілген жұмыста мартен пештерін жүктеуде қолданылатын қозғалыстағы аудару рельстік машинасының қозғалу механизімін динамикалық моделін құруын қарастырамыз. Осыған ұқсас көптеген машиналар ірі металлургиялық зауыттарда қолданылады. Олар: Қарағанды металлургиялық комбинаты (Қазақстан), Магнитогор металлургиялық комбинаты (Россия), «Криворожсталь» (Украина) және басқа металлургиялық комбинаттар мен зауыттарда.
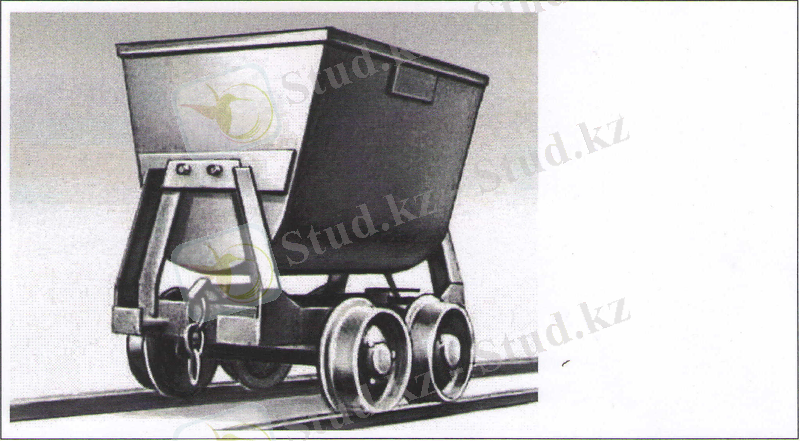
Жетекті рельстік жылдам машинаның, мысалы трамвай, метро вагондардын (0-1 сурет) жүріс бөлігін осы әдістермен зерттеледі. Жетексіз рельстік машинаның жүріс бөлігін осы әдістермен зерттеуге мүмкін болады. Мысалы 0-2 суретте көрсетілген темір жол вагоны және 0-3 суретте көрсетілген шахталы вагонетка. Олардың жетексіз жүріс бөлектері (қос доңғалақ) бір қатты дене деп жасалған, сондықтан статикалық анықталмаған.

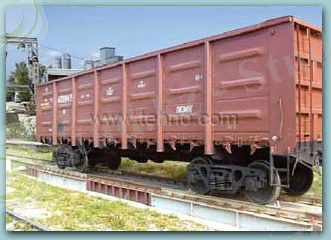
0-2- Сурет Теміржол вагоны.
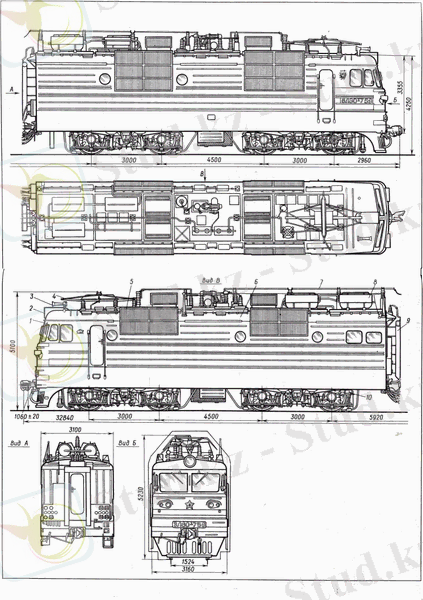
0-4- Сурет. Екі секциялы жүк электравозы.
 0-5- Сурет. Жолаушылар паравозы.
0-5- Сурет. Жолаушылар паравозы.
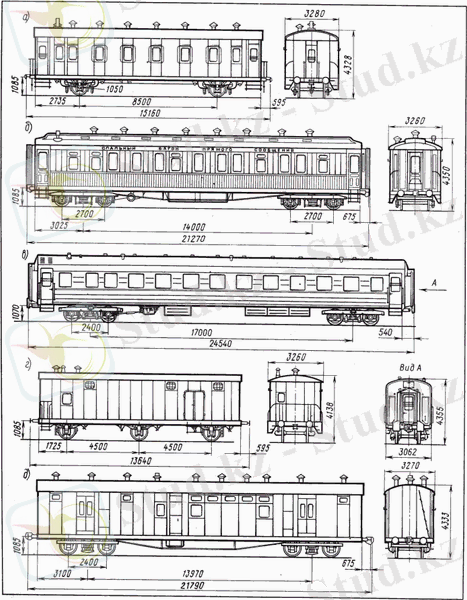
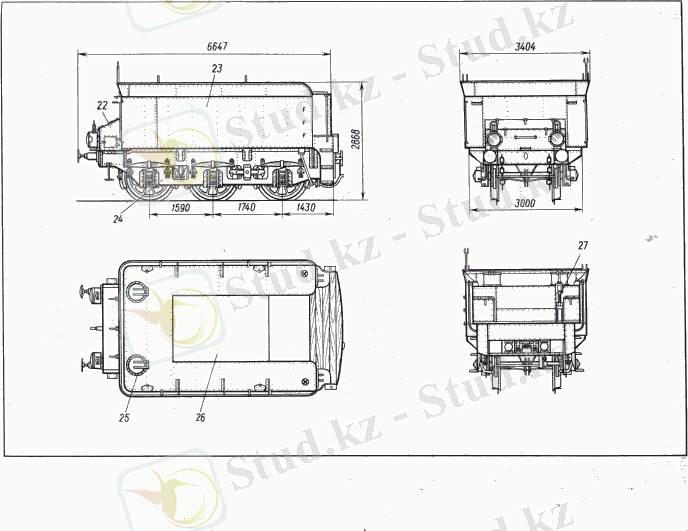
0-6- Сурет. Жолаушылар вагоны.
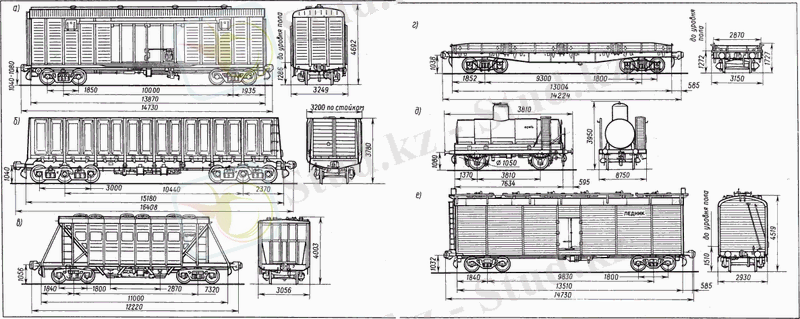
0-7- Сурет. Жүк тасымалдау вагоны.
Бұл сұлбада өзіміз көріп отырғандай рельсті жүк машинасының күштердің қалай әсер етуі қарапайым ретінде көрсетілді. Оның қозғалыссыз түрінде көрсетілуі көптеген есептеуге алып келеді. Мұнда менің негізгі көрсететін есептеуім жоқ, бірақ қатысы бар екені мысал ретінде көрсетілді.
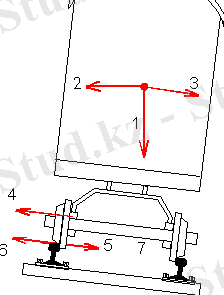
0-8- Сурет. Рельсті жүк машинасының күш сұлбасы: 1 - салмақ күші; 2 - солға тарту күші; 3 - оңға тарту күші; 4 - рамалық күш дөңгелекке қатысты; 5 - бүйір бетінің күші; 6, 7 - дөңгелек пен рельс арасындағы үйкеліс күші.
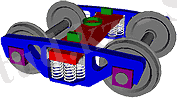
0-9- Сурет. Маторсыз рельсті машинаның серіппелі қозғалыссуреті
1 Машинада әсер ететін күштер.
Машинаның жұмыс жасау барысында оның буындарына мынадай берілген (белгілі) күштер қосымша тіркелген: қозғалушы күш, технологиялық кедергі күші, ауырлық (салмақ) күші, механикалық немесе қосымша кедергі және буындардың қозғалу нәтижесінде пайда болатын инерция күштері. Тек кинематикалық жұптарлардағы күштер (байланыс реакциясы) белгісіз болып қалады.
Қортындыланған, оң жұмыс жасайтын қозғалыс - Р күші деп аталады. Мысалы, іштен жанатын қозғалтқышында бұл жанатын газды поршенге әсер ету нәтижесі болып табылады, ал электроқозғалтқышында - электромагниттік өрісінің айналатын роторға түсірелген момент болып табылады.
Технологиялық кедергі Q күші дегеніміз, ол жетектегі буындарына түсірелген күш, оны жеңу себебімен машина (пайдалы кедергі күші) құрастырылған. Жүк көтеру машинадасында, көтерілетін жүктің салмағы алынады, металл кесу станогы мен пресстерде - кесу және пресстеу кезіндегі кедергі. Технологиялық кедергі күшінің жұмысы теріс болып табылады.
Буындар ауырлығының күштері (гравитациялық күш-салмақ) масса буыннын орталығында түсірелген. Көп жағдайларда жылдам машиналар есептеу барысында ауырлық күшіне немқұрайлықпен қарайды. Механизм кезеңдік (период) жұмысының ауырлық күш жұмысы нөлге тең, өйткені буындардың массалық орталықтары жабық траекториясымен жылжиды, ал G ауырлық күшінің бағыты өзгермейді.
Механикалық немесе қосымша
 кедергілер
буындардың салыстырмалы қозғалысында түйісетін аймақтардағы пайда болатын күштер немесе басқаша айтқанда қалыпты (нормаль) реакцияларға пропорционал
үйкеліс күштері
. Үйкеліс күші жұмысы теріс, өйткені кинематикалық жұптардың элементінің салыстырмалы қозғалысына әрқашан қарама қарсы бағытталған.
кедергілер
буындардың салыстырмалы қозғалысында түйісетін аймақтардағы пайда болатын күштер немесе басқаша айтқанда қалыпты (нормаль) реакцияларға пропорционал
үйкеліс күштері
. Үйкеліс күші жұмысы теріс, өйткені кинематикалық жұптардың элементінің салыстырмалы қозғалысына әрқашан қарама қарсы бағытталған.
Пайдалы әсер коэфициенті - машина агрегатының маңызды көрсеткіші негізінде үйкеліс күштер арқылы анықталады.
Инерция күштері
 механизм буындар бірқалыпсыз қозғалысынан пайда болады. Құрылыс фундаментінің негізіне ұзақ әсер ету барысында, онда жұмыс істейтін машиналардан фундамент күйі нашарлайды, яғни бұзылуы да ықтимал. Сондықтан механизмнің жұмысы қанағаттанарлықтай болуы үшін оның буындар инерция күштері теңдестірілуі тиіс.
механизм буындар бірқалыпсыз қозғалысынан пайда болады. Құрылыс фундаментінің негізіне ұзақ әсер ету барысында, онда жұмыс істейтін машиналардан фундамент күйі нашарлайды, яғни бұзылуы да ықтимал. Сондықтан механизмнің жұмысы қанағаттанарлықтай болуы үшін оның буындар инерция күштері теңдестірілуі тиіс.
Кинематикалық жұптардағы пайда болатын
байланыс реакциялары
 . Осы ұғым механизмінің буынды жеке қарастырған кезінде енгізіледі. Үйкеліс күштері де (жанама құрастырушылар) реакцияларға қатысады.
. Осы ұғым механизмінің буынды жеке қарастырған кезінде енгізіледі. Үйкеліс күштері де (жанама құрастырушылар) реакцияларға қатысады.
Массаларды өзгеріс (қосу не бөлу) кезінде пайда болатын күштер, таразылы құрылыстарға, жүк көтеру машиналарына, айнымалы құрылым және басқа механизмдерге тән.
Серпімділік күші мен серпімділік күш моменттері, механизм жұмысына буындардың серпімділігінің әсер ету кезінде есептеу керек. Бұл күш факторлары серпінді элементтерде, ұсақ массасы мен габариттерінде өте көнгіш бөлшектерде пайда болады (серіппелер, рессорлар, пневмоэлементтер және т. б. бұйымдар) олар төменгі жағдайларда қолданылады: түрткі мен соққы амортизациялауында, тербелулердің демпфирленуінде, энергияның шоғырлануында, күш серпелісінде және т. б. мақсаттарда қолданылады. Кең тараған серпінді элементтерінің бірі - серіппелер болып табылады. Функция бойынша оларды созылу, қысу, бұрау және иілу серіппелеріне бөледі, ал конструкциясы бойынша олар бұрандалық, тәрелкелі, жалпақ шиыршықты және парақты рессорларға бөлінеді. Осының ішінде дөңгелек қима сымнан жасалған созылу, қысу мен бұрау өрілген серіппелер кең тараған. Серпінді элементтерінің маңызды сипаттамасы - қатаңдық с - дефармацияны тудыратын күшін дефармацияға қатынасы болып табылады. Созылу, қысу серіппелеріне қатаңдығы
оның өлшемдігі Н/м. алынады.
Бұрау серіппесіне немесе біліктер үшін (бұралуға қатаңдығы)
оның өлшемдігі Нм/рад немесе Нм, себебі радиан өлшемсіз шама деп есептеледі.
Мұнда: F -серіппенің созылу (қысу) күші;
Т-серіппеге әсер ететін айналу моменті;
х- серіппенің сызықтық деформациясы;
φ - серіппенің немесе біліктін бұрыштық деформациясы.
с
қатаңдығы тұрақты шама болғанда серпінді элеметтегі пайда болатын күш F, немесе момент Т деформацияға пропорционал бойынша өзгереді, мұнда созылу мен сығылу (қысу) қатаңдығы (1. 1 сурет)
бұралуға қатаңдығы
Мұндай серпінді элементтерге сызықтық сипаттама тән келеді.
1. 2 суретте серпінді элементінің сатылы-сызықтық сипаттамасы
берілген. Белгілі бір күш жету барысында, өсу барысындағы күш бұзылуын алдын алу үшін қосымша серпінді элеметтер қабылданады, сондай-ақ қаттылықтар есептеледі.
Мұндай сипаттама жүру бөлігін аса жүктіліктен қорғауға жасалған жүк таситын машиналарға тән.

Сатылы-сызықтық сипаттамасына сәйкес жабдығы 1. 3-суретте көрсетілген. Массасы m жүгі а - саңылау ұшында қозғалғанда серпінді элементінің сипаттамасы 1. 2-суретінде номер 1-мен белгіленген. Пайда болатын серпімді күш P 1 = c 1 ·x өрнегімен анықталады, онын шарттары x ≤ a. Ал енді, x > a c 2 қатандығы серіппіне да деформация пайда болады. Сонда нәтіжелі серпімді күш P = c 1 ·x + с 2 (х - а) өрнегімен анықталады. P күшінін сипаттамасы 1. 2 - суретінде номер 2-мен белгіленген.
Күш пен деформация аралығындағы серпінді элементтер пропорцияның болмауы серпінді элементтің (серпінді байланысының)
сызықсыздық сипаттамасын білдіреді, мұндай сипаттама 1. 3 суретте көрсетілген.
Серпінді күші Р у = с х,
серпінді күш моменті М у = с φ φ
немесе М у = с φ (φ 1 - φ 2 )
формулаларымен анықталады.
Серпінді байланған денелер жүйесінің тербеліс процесінде, материал бөліктерінің ішкі үйкелісімен пайда болатын диспассивті кедергі күші.
Диспассивті кедергі күштін түрі


Диспассивті кедергі күшін моменттің түрі

Мұнда
 диспассив кедергісің коэффициенті
диспассив кедергісің коэффициенті
Диспассивті кедергі күші механикалық энергияның шашырауына соқтырады. Әсер ету сипаттамасы бойынша күш-салмақтың екеуі де қосымша кедергі не әсер ету байланыстарына тән деп қарастырылуы мүмкін. Рельстік көліктің жұмысына серпінді күш мезеті мен диссипативті кедергінің әсер етуін төменде қарастыратын боламыз. Механизмнің кіру топтарына қозғалтқыштың-басқару жүйесі мен қозғалтушы түріне тәуелді (электрлі, гидролы, пневмо не ішкі жану) мезеті тіркеледі. Қозғалтушы дамытатын жігерлер индикаторлы диаграммамен (ішкі жану қозғалтушы үшін) не механизмнің сипаттамасымен аналитикалық немесе графикалық түрде электрлі қозғалтқыш үшін көрінеді.
1. 1 Машина механизмінің жетегіндегі біліктердің айналу қатаңдығын анықтау
Бұл бөлімде рельсті машинаның қозғалтқыштарының механизмніндегі біліктерінің айналу қатаңдық сандық мәндерін қарастырамыз. ( 2. 1 - 2. 3 сурет)
1. 2 Рельсті машинаның қоғалтқыш механизмінің бәсеңдеткіш жүргізудегі біліктің айналу қаттылығын анықтау.
Білік әрбір ұзындық пен диаметрлік сатыларға ие. (2. 1 - 2. 2 сурет) . Алдымен әрбір сатының қаттылығын анықтаймыз.
Біліктің ең үлкен бөлігі ( 2. 1-сурет), электрқозғалтқыштың берілісті айналдырушы моменттің ұзындығы l 1 = 3500мм және диаметрі d 1 = 105мм тұрған көлденең қималы . Бұл бөлік 2. 1-суретте көрсетілген.
Аталған бөліктің айналу қаттылығы (1. 1) формуламен анықталады, айналу модулі G = 8·10 4 МПа


Бірінші теңдік тісті жалғастырғыш арқылы қосылған (2. 2-сурет), ұзындық пен диаметр; l 2 = 125мм, d 2 = 105мм, l 3 = 170мм, d 3 = 110мм, l 4 = 305мм, d 4 = 120мм келтірілген диаметрлі білікпен алмастырамыз d 1кел (2. 3- сурет) .
(2. 2-сурет) Бәсеңдеткіш білігінің сатылы бөлігі эскизі с диаметр d 2 =105, d 3 =110, d 4 =120 жүргізуші білікті қаттылығы солай бөліп ауыстыру тиімді. Бұл білікті келтірілген ұзындықтағы бірінші білікпен ауыстыруға болады. Сатылы біліктің бөлігіндегі бір ізділігі қозғалыс серіппе ретінде қарастырылады. Бұл жағдай

Келтірілген диаметр
 білік бөлігіне қатысты ұзындық пен диаметр l
2
= 125мм, d
2
= 105мм, l
3
= 170мм, d
3
= 110мм, l
4
= 305мм, d
4
= 120мм анықталу формуласы
білік бөлігіне қатысты ұзындық пен диаметр l
2
= 125мм, d
2
= 105мм, l
3
= 170мм, d
3
= 110мм, l
4
= 305мм, d
4
= 120мм анықталу формуласы
 .
.
Біліктің әрбір бөлігіне қатысты кері пропоционал.
 (1. 2)
(1. 2)
Келтірілген беріктілігі
Сатылы біліктің қосынды қаттылығы

 +
+
 +
+
 .
.
Сатылы білікті қосынды беріктілігі келтірілген білік сатылы білікке тең шарты келесі формуламен анықталады
 +
+
 +
+
 ,
,
Бұдан білік ұзындығының анықталатын формула өрнектеледі

Біліктің бұл бөліктің ұзындығы 618мм.
2. 3-Сурет Біліктің келтірілген ұзындығы l кел = 618 мм
және келтірілген диаметр
 = 114 мм
= 114 мм
Келтірілген ұзындығы және келтірілген диаметр l
кел
= 618 мм
 = 114 мм
= 114 мм
 .
.

 .
.
Жүргізілген бөлікте білікпен жасалған тіс тегеріш орналасқан. Тегеріштің бөлгіш диаметр
 , жүктеме ұзындығы
, жүктеме ұзындығы

Тістегеріш айналу қаттылығы (1. 1) .
 немесе
немесе
 .
.

 .
.
Келтірілген ұзындық және тіс тегеріш орналасқан бөлігі қаттылығы l кел = 618 мм ( 2. 3-сурет)
Қатты қозғалыста бір ізді деп санап парапар қатынаста табылады (1. 3) :
 немесе
немесе
 .
.
Бәсеңдеткіш жүргізу білігі толықтыру қатынасын анықтау үшін біліктің екінші бқлігін анықтау қажет:
- Білік бөлігінің электрқозғалтқыш айналымы;
- Айналу білігінің тісті бөлігі.
Жүргізуші біліктің бір ізді жалғастырушы білік бөлігі ретінде болады (1. 3)
 .
.
Машина қозалысының механикалық бәсеңдеткіш жетегіндегі білік пен аралық біліктің айналу қатнасын анықтау барысында үлкен өзгертулер алынды. Бірінші аралық білік (2. 4-сурет) үш айнымалы моменттің жүктеме бөлігі:

Бұл үш сатылы біліктің келтірілген ауыстыру. Оның келтірілген ұзындық диаметрінің ауыстыру.
Бірінші аралық келтірілген білік ұзындығы

Бірінші аралық айнымалы қатты білік

Бірінші аралық айнымалы қатты білік:
 .
.
 Нм.
Нм.
Екінші аралық біліктің жүктеме бөлігінде тұрған геометриялық өлшем

Бұл екінші сатылы келтірілген білік ауыстыру. Оның ұзындық диаметрінің ауыстырылуы
 .
.
Оның біліктің ұзындық ауыстырылуы
 .
.
Екінші аралық біліктің айналу қаттылығы (1. 1)
 .
.
 .
.
d 10 = 145мм, d 11 = 150мм, d 12 = 170мм, l 10 =160мм, l 11 = 170мм, l 12 = 300мм.
Келтітірілген диаметр есептеуі
 .
.


Жетектегі біліктің айнымалы қатаңдық

Жетектегі сол жақ бөлігіндегі біліктің келтірілген айнымалы қаттылығын анықтау үшін келесі есептеулер шығады. Серпімді буынды динамикалық жүйесінде, біздің жағдайымызда трансмициялық біліктер потенциялдық энергияға жеткізу болып табылады, энергияның массалық байланысы кенетикалық энергияға айналады.
Білік қаттылығы келтіру барысында келтірілген және келтірілген жүйелер потенциялдық энергияға тең принципіне негізделеді.
Барлық жүйе берілген жағдайда айналдырушы қаттылық с
1
, с
1пж
, с
2пж
, с
вд
2-3 дөңгелекте келтіреміз (2. 1-сурет), мұндай жағдайда
 координатасы
координатасы
қатысты болады. Эквивалентті келтірілген с 12 қаттылықта анықталу формуласы
 ,
(1. 2)
,
(1. 2)
где
 - бірінші өстегі келтірілген айналу қаттылығы,
- бірінші өстегі келтірілген айналу қаттылығы,
 - екінші өстегі келтірілген айналу қаттылығы,
- екінші өстегі келтірілген айналу қаттылығы,
 - өстегі келтірілген айналу қаттылығы, екінші және үшінші аралығындағы
- өстегі келтірілген айналу қаттылығы, екінші және үшінші аралығындағы
с вд - өстегі келтірілген айналу қаттылығы.
Бірінші өстегі келтірілген айналу қаттылығы. Келтірілген біліктің потенциялдық энергиясының теңдігі
 , осыдан
, осыдан
 ,
,
 = 10, 33 - Мұнда бәсеңдеткіш беріліс қатнасы (2. 1сурет) .
= 10, 33 - Мұнда бәсеңдеткіш беріліс қатнасы (2. 1сурет) .
 және
және
 - сәйкесінші жетектегі және жетекші беріліс айналу бұрышы,
- сәйкесінші жетектегі және жетекші беріліс айналу бұрышы,
 и
и
 - сәйкесінші жетектегі және жетекші берілісің бұрыштық жылдамдығы.
- сәйкесінші жетектегі және жетекші берілісің бұрыштық жылдамдығы.
Бірінші біліктегі келтірілген айналым қатнасын табу

 = 2, 46·10
5
·10, 33
2
= 262·10
5
Нм
= 2, 46·10
5
·10, 33
2
= 262·10
5
Нм
Аналитикалық тұрғыда сәйкесінші екінші
 және үшінші
және үшінші
 , біліктегі потенциалдық энергияның теңдігін аламыз
, біліктегі потенциалдық энергияның теңдігін аламыз

Мұнда z 2 = 26, z 3 = 61, z / 3 = 26, z 4 = 50 - аралық жетектегі біліктің тістер саны
(1. 2) формуланы пайдалана отырып рельсті машина механизміндегі жетектің сол жақ келтірілген айнымалы қатынастың сандық мәнін анықтау
 ,
,
 .
.
2. 1суретті ескере отырып қозғалыс механизм жетегіндегі симетриялы оң айналым қаттылығы сақталады
с 13 =с 12 = 47, 3·10 5 Нм.
Демек электрқозғалтқыш роторының инерция моменті J 1 , оң және сол айналу моменті J 2 , J 3 , келтірілген айналу қаттылығы С 13 және С 12 , осы параметрлер белгілі деп қозғалыс механизмінің келтірілген есептеулер мен сұлбалар мкханизм қозғалысының сипатталған динамикалық моделін құруға болады.
Бұл жағдайда трансмиссиялық біліктерден жасалған жабдықта серпімділік теориясы ескерілді. Машинаның қозғалғыш бөлігі, жоғарыда айтылған тәсілмен, жетектің құрылымдық ерекшеліктері ескеріліп моделденеді. Серіппенің, рессордың және басқа серпімді элементтердің негізгі сипаттамасы - қатаңдық. Ол трансмиссиялық біліктердегі серпімділік күштерінің моменттерін анықтайтын созылу-сығылу кезіндегі қатаңдық (серіппелер, рессорлар, сырықтар), арқалықтың көлденең тербелісі кезіндегі иілу қатаңдығы және бұралу қатаңдығы болып бөлінеді. Бұралу қатаңдығы ұзындығы 1м қатаң бекітілген біліктің бос бөлігі 1 радианға бұрылу үшін білікке қандай момент түсіру керектігін көрсетеді.
2 Машинаның қозғалыс механизмінің динамикалық моделін құру
2. 1 Есептеу сұлбаларын құру
Қандай да бір механизмді оның буындарындағы динамикалық жүктемелердің бар болуына зерттеу барысында механизмнің динамикалық моделін құру қажет.
Динамикалық модель - теориялық зерттеулерде және инженерлік есептеулерде қолданылатын, қарастырылатын механикалық жүйенің дәріптелген кескіні (есептеу сұлбасы) .
Механизмнің динамикалық моделі көбіне шын параметрлері келтірілген параметрлермен алмастырылған динамикалық есептеу сұлбасы түрінде болады.
Механизмнің динамикалық моделін оның барлық буындары абсолют қатты деп құруға болады. Бірақ мұндай зерттеу қазіргі кезде көптеген машиналар үшін ыңғайлы емес. Мұндай есептеулердің нәтижелері машина жұмысы кезінде атқарушы механизмдер буындарының контурларында пайда болатын тәжірибе жүзінде алынған жүктемелердің мәндерінен айтарлықтай өзгеше. Сондықтан динамикалық модельдеу буындардың серпімділігі ескеріліп жасалады, қажетті жағдайда масса (инерция моменті) және серпімді буындардың қатаңдығы сияқты параметрлердің айнымалылығы ескеріледі.
Динамикалық модельдердің құрылуында шын мәнінде механизмнің күрделі механикалық жүйе екендігі ескеріледі. Бұл оның зерттелуін аса қиындатады, кейде тіпті мүмкін емес жағдайға дейін келеді.
Болат балқытатын өндірісте қолданылатын рельсті аудару машинасының қозғалыс механизмінің кинематикалық сұлбасын мысал ретінде қарастырып шын мәніндегі механизмнің қиындығына көз жеткізуге болады (3. 1сурет) . Механизмнің әрбір тармағына жүргіш (тез айналатын) білік 8, жалғастырғыштар (муфталар) 7, мойынтіректер (подшипниктер), қозғалғыш дөңгелек 2 және бірсатылы редуктор 9 кіреді. Оның (редуктор) құрылымында жетекші білік-тістегергіш, тісті дөңгелектер орналасқан (монтаждалған) екі аралық біліктер және тісті дөңгелекті жетектегі білік 10 бар. Сол жетектегі білік муфта арқылы жалғасқан бөлігінде 2 қозғалғыш дөңгелек орналасқан. Жетекші білік-тістегергіш (жүргіш білік) электр қозғалтқышы роторымен 1 бір айналу өсінде орналасады. Жетектегі білік 10 қозғалғыш дөңгелекпен 2 бір айналу өсі бар болады.
 Бірсатылы редуктордын 9 біліктердің жүйесі серпімді элементер тізбекті қосылыс деп қарастырамыз.
Бірсатылы редуктордын 9 біліктердің жүйесі серпімді элементер тізбекті қосылыс деп қарастырамыз.
Шын мәніндегі объектілер күрделі механикалық жүйе болғандықтан динамикалық модельдеу барысында қарастырылатын механизмде оны пайдалану кезінде пайда болатын басым түсетін (доминирующие) жүктемелерді ескеру қажет.
Рельсті машинаның динамикалық есептеу сұлбасын (динамикалық моделін) құруды қарастырайық Қозғалыс механизмінің кинематикалық сұлбасы (3. 1сурет) электрқозғалтқышты 1, муфталарды 7, жүргіш біліктерді 8, редукторды 9 және қатты жақтауға (рама) 6 орналастырылған
 қозғалғыш дөңгелектерді 2, 3, 4, 5 қамтиды.
қозғалғыш дөңгелектерді 2, 3, 4, 5 қамтиды.
Рельсті машиналардың қозғалысында трансмиссиялық біліктерде, электрқозғалтқыштан машинаның қозғалғыш дөңгелектеріне берілетін, бұралу моменттері пайда болады. Берілген жағдайдағы бұралу моменттері - басым түсетін жүктеме. Машина жетегі механизмі буындарының серпімділігінен трансмиссиялық біліктерде серпімділік күшінің ауыспалы таңбалы моменттері пайда болады, яғни машина қозғалысы бүралу тербелістерімен қабаттаса жүреді. Демек, динамикалық модельдеу кезінде тербеліс процесін суреттеуге мүмкіндік беретін параметрлерді, атап айтқанда, қозғаушы күштердің және кедергі күштердің келтірілген моменттерін, келтірілген инерция моменттерін және қозғалыс механизміндегі трансмиссия бөлшектерінің келтірілген бұралу қатаңдықтарын анықтау керек.
Механизмді дискретті массалардан және салмақсыз серпімді байланыстардан құралған механикалық модельмен алмастыруға болады. 3. 2 суретте келтірілген инерция моменттері
 , өзара, қатаңдықтары
, өзара, қатаңдықтары
 және
және
 2 және 3 дөңгелектерінің айналу өсіне келтірілген, салмақсыз серпімді біліктермен байланысқан үш дискретті массалардан құралған механизмнің есептеу сұлбасы көрсетілген.
2 және 3 дөңгелектерінің айналу өсіне келтірілген, салмақсыз серпімді біліктермен байланысқан үш дискретті массалардан құралған механизмнің есептеу сұлбасы көрсетілген.
Сұлбаны құрғанда жетектің барлық айналатын бөлшектерінің - біліктердің, муфталардың, тісті дөңгелектердің массалары механизмдер теориясынан белгілі тәсілдермен қозғалғыш дөңгелектер 2, 3 жұбының айналу 10 өсіне келтірілген (3. 2-сурет) .
Механизмде әсер ететін күштер мен күш моменттерін зерттеу ыңғайлырақ болу үшін механизмнің барлық массасы шоғырланған буынына, яғни келтіру буынына, келтірілуі керек. Келтірілген күштердің және күш моменттерінің мәндері келтірілетін және келтірілген күштердің немесе күш моменттерінің қуаттарының тең болу шартынан анықталады.
2. 2 Жетектің келтірілген инерция моментін анықтау
Инерция моменттерін (массаларды) келтіру есебі келтірілген және келтірілетін массалардың кинетикалық энергияларының тең болу шартынан шешіледі.
Рельсті машинасының қозғалыс механизм бір жетегінің сол тармағын қарастырайық (3. 4сурет) . Электрқозғалтқыш роторының
 , жетектің сәйкесті сол және оң бөліктерінің айналу массаларының
, жетектің сәйкесті сол және оң бөліктерінің айналу массаларының
 ,
,
 келтірілген инерция моменттерін анықтауды қарастырайық. (3. 1-3. 3-суреттер) . Электрқозғалтқыш роторының
келтірілген инерция моменттерін анықтауды қарастырайық. (3. 1-3. 3-суреттер) . Электрқозғалтқыш роторының
 келтірілген инерция моменті осы формуласымен анықталады.
келтірілген инерция моменті осы формуласымен анықталады.
(2. 1)
Мұндағы
 - электрқозғалтқыш роторының инерция моменті, оның мәні қозғалтқыштың паспорттық сипаттамаларынан алынады;
- электрқозғалтқыш роторының инерция моменті, оның мәні қозғалтқыштың паспорттық сипаттамаларынан алынады;
u 12 - редуктордың 9 беріліс қатынасы, оның мәні редуктордың техникалық суреттемесінде келтіріледі немесе редуктордың тісті дөңгелектерінің тістерінің санына (z 1 , z 2 ) байланысты есептеледі.
Жетектің сол тармағының (3. 3-сурет) келтірілген инерция моментерін сан мәндерін анықтауын қарастырайық.

Қозғалыс механизмі жетегінің сол бөлігінің келтірілген инерция моментін

(2. 2)
формуласымен анықтауға болады.
Мұндағы
 - 2 дөңгелегінің,
- 2 дөңгелегінің,
 - 12 тісті дөңгелектің және осы бөлшектер құрастырылған білігін -
- 12 тісті дөңгелектің және осы бөлшектер құрастырылған білігін -
 10 өсіне қатысты инерция моменттері;
10 өсіне қатысты инерция моменттері;
 - тез айналатын 8-жүргіш біліктін 10 өсіне келтірілген инерция моменті,
- тез айналатын 8-жүргіш біліктін 10 өсіне келтірілген инерция моменті,
 - 13-жетекші білік-тістегергіштің 10 өсіне келтірілген инерция моменті,
- 13-жетекші білік-тістегергіштің 10 өсіне келтірілген инерция моменті,
 - 7-муфтанын 10 өсіне келтірілген инерция моменті.
- 7-муфтанын 10 өсіне келтірілген инерция моменті.
 ,
,
 ,
,
 инерция моменттері осы формулалар арқылы табылады
инерция моменттері осы формулалар арқылы табылады
 ,
,

 . (2. 3)
. (2. 3)
Мұндағы
 ,
,
 ,
,
 - 8-жүргіш біліктін, 7-муфтанын және 13-жетекші білік-тістегергіштің өз айналатын өсіне қатысты инерция моменттері, u
12
- редуктордың 9 беріліс қатынасы.
- 8-жүргіш біліктін, 7-муфтанын және 13-жетекші білік-тістегергіштің өз айналатын өсіне қатысты инерция моменттері, u
12
- редуктордың 9 беріліс қатынасы.
Сіз бұл жұмысты біздің қосымшамыз арқылы толығымен тегін көре аласыз.
- Іс жүргізу
- Автоматтандыру, Техника
- Алғашқы әскери дайындық
- Астрономия
- Ауыл шаруашылығы
- Банк ісі
- Бизнесті бағалау
- Биология
- Бухгалтерлік іс
- Валеология
- Ветеринария
- География
- Геология, Геофизика, Геодезия
- Дін
- Ет, сүт, шарап өнімдері
- Жалпы тарих
- Жер кадастрі, Жылжымайтын мүлік
- Журналистика
- Информатика
- Кеден ісі
- Маркетинг
- Математика, Геометрия
- Медицина
- Мемлекеттік басқару
- Менеджмент
- Мұнай, Газ
- Мұрағат ісі
- Мәдениеттану
- ОБЖ (Основы безопасности жизнедеятельности)
- Педагогика
- Полиграфия
- Психология
- Салық
- Саясаттану
- Сақтандыру
- Сертификаттау, стандарттау
- Социология, Демография
- Спорт
- Статистика
- Тілтану, Филология
- Тарихи тұлғалар
- Тау-кен ісі
- Транспорт
- Туризм
- Физика
- Философия
- Халықаралық қатынастар
- Химия
- Экология, Қоршаған ортаны қорғау
- Экономика
- Экономикалық география
- Электротехника
- Қазақстан тарихы
- Қаржы
- Құрылыс
- Құқық, Криминалистика
- Әдебиет
- Өнер, музыка
- Өнеркәсіп, Өндіріс
Қазақ тілінде жазылған рефераттар, курстық жұмыстар, дипломдық жұмыстар бойынша біздің қор #1 болып табылады.

Ақпарат
Қосымша
Email: info@stud.kz