Өнеркәсіптік манипуляторларды жобалау және талдау: құрылымдық-кинематикалық синтез, динамика және экономикалық-еңбек қорғау бағалауы (Gudel роботы мысалында)

Жұмыс түрі: Дипломдық жұмыс
Тегін: Антиплагиат
Көлемі: 58 бет
Таңдаулыға:
КІРІСПЕ
Қазіргі заманғы техникалық прогрестің ерекшелік белгісі - өндірсте компьютерлік және сандық программалы басқарылатын қазіргі заманғы станоктар, өндірістік роботтар және басқа да технологиялық жабдықтар болып табылады.
Қазіргі кезде тұрмыста немесе кеңседе ыдыс жуатын, кір жуатын машиналар, принтерлер және құрастырылған микропроцессролар мен микроэлектрониканың әр-түрлі құралдарының салдарынан, автоматты түрде жұмыс істеу мүмкіндігі бар көптеген техника қолданылады. Өндірістік операцияларды роботтандыру өндірістің өнімділігін, өнімдердің сапасын жоғарылату мен роботтардың қолдану аймақтарын күннен күнге кеңейтуде.
Өндірісті роботтандырудың деңгейі мен тиімділігі - адамдардың жұмысын жеңілдету, жұмыстың сапасы, өнімділігін арттыру, қауыпсіздік шаралары, еңбек күшін үнемдеу т. б. жақтарынан көрінеді.
Бірінші тарауда көтеруді автоматтандыру кезіндегі қолданылатын роботтардың қолданылуы қарастырылады.
Экономика бөлімінде роботтарды енгізу арқылы алынатын жылдық экономикалық тиімділік, өтелу мерзімі және жылдық экономика есептелінеді.
Еңбек қорғау бөлімінде роботтандырудың қауіпті және зиянды факторларына анализ жасалады. Және де көтеру роботтарын қолдану кезіндегі қорғану шараларын ұйымдастыру жағдайлары сипатталады.
1. ӨНЕРКӘСІП РОБОТТАРЫНЫҢ НЕГІЗГІ МЕХАНИЗІМДЕРІҢ ЖАЛПЫ ТҮСІНГІ
- Механизімнің еркіндік дәреже саны құрылымдық формолалары
Машиналар механизімінде буындар күйін бір мәнді анықтайтын жалпыланған кардинаталар саны еркіндік дәреже санын не механизім қозғалғыштығы бірақ көп қозғалмалы басқармалы механизімдерге қатысты серпімділік саны және қозғалғыштық дәреже санына сәйкеседі, шындығында еркін денеде 6 еркіндік дәрежесі бар. Сондықтан манипулиятордың жұмыс мүшесі не кезкелген буыны 6-дан көп еркіндік дәрежесі саны жұмыс зонасын ұлғайту не болдырмау мақсатында алынады. Мысалы теллескоптық антеннаны буырышында тізбектей қосылған, жұптар құратын және бір бағытта қозғалатын кинеметикалық тізбек түрінде көруге болады.
Бұл жағыдайда антенна ұзындықты қамтамасыз ету байланысты антенаның қозғалғыштық дәреже санының қозғалғыштық дәреже саны бірліктен үлкен кез-келген бүтін сан болуы мүмкін. осыған байланысты еркіндік дәреже саны инерционалды жүйеге қатысты қарастырылатын дене күйін анықтайтын тәуелсіз мүмкін орын ауыстырулардың тақ санын айтады.
Дәреже санын анықтау үшін құрылымдық формалалар қолданылады. Жалпы алғанда қозғалтқыштың дәреже санын W мына формуламен анықтайды:
 (1. 1)
(1. 1)
Мұндағы n - қозғалмалы буындар саны; S бұрылымдардың салыстрмалы қозғалысқа түсетін КП баланыстарының қосынды саны (1. 3) формуласын қортындыласақ байланыс қатылығын әр буын басқа буынға қатысты 6 еркіндік дәрежесінеие, n буынынан тұратын жүйе күшін анықтайтын жалпыланған кардинатасаны 6n ға тең.
Егер буындар байланыс құрса, онда олар жалпы саны s тең байланыс санына жалпыланған кордината санын байланыстыра отырып өзінің қатысты байланыс қозалыстарына қосады.
 (1. 2)
(1. 2)
Мұндағы
 -1, -2, -3, -4, -5, -қозғалмалы НП -ның қосынды саны (1, 3), (1, 4) тен сомов-малышов құрылымдық формуласы шығады:
-1, -2, -3, -4, -5, -қозғалмалы НП -ның қосынды саны (1, 3), (1, 4) тен сомов-малышов құрылымдық формуласы шығады:
 (1. 3)
(1. 3)
Келтірлгендрді талдап жазсақ механизімдер үшін құрылымдық
формолалар жазылады.
 (1. 4)
(1. 4)
(1, 3) фурмолла Чебышевтың құрылмдық формаласыда (1, 4) формаланы қортындыласақ жазықтықта бір-біріне қатысты денерлер 3 еркін дік дәрежесіне тең, тұйық емес кинеметикалық тізбегі бар манипулияторлар үшін қозғалыстың дәрежесіне кинеметикалық жұп саны мен анықтаған болады.
 (1. 5)
(1. 5)
Бірақ (1. 4) және (1. 5) құрылымдық формалалары белгілі шарттардың орныдалуы негізінде ғана нақты. Мысалы міндетті шарыт болып механизімдердегі айнымалы жұп өстері өзара паралелл, ал енуші кинеметикалық жұптың бағыттауыштары айналу өсіне перпендіколияр болуы керек болып табылады реалды механиімдерде бұған жету оте қиын, сондықтан құрылымдық формулалар абстакті, идялды механизімдерге қолданылады деп ескергенде бірді ескеру қажет, құрылымдық формулалары қортындылағанда қортындының еркіндік дәрежесін анықтауда жалпық қозғалтқыштың санынан байланыс саны алынады. әдеттегі механизімдер мен тұйық манипулияторларда қайталанушы байланыстар болуы мүмкін. Машина механизімінде қайталаушы байланыстарды артық байланыстарды артық валдың пайда болу бұрыштарға берілген байланыстар тәуелді болуы мен түсіндіріледі: сондай ақ қозғалтқыш дәрежесіне келтірлген қозғалтқыштар өзара тәуелді болатыны әсер етеді.
Сондықтан механизім құралдардың ең бөлшектік талдау үшін оның құрылымының басқа үлгілерді және қозғалғыштың еркіндік дәрежесін анықтаудың басқа қабылдаулар қажет механизм құруды талдау және синтездеу кезінде көп жағыдайда метірлік өлшемдер ескерілмейді.
Мысалы симплициялық механизімнің топлограпиялық үйкелісін жасап, механизім құрылымынын талдауы мен синтездеуін шешуге мүмкіндік береді бұл кезде кинеметикалық жұп ұшін симплициялық кешендер құру кинеметикалық жұп құрамын бір-бірне қатысты күйлерін есептейтін кинеметикалық параметірлер білігіне сүйенеді.
1. 2 манипулиятор жасауға талдау
Қазіргі кездегі робыт манипулияторлардың орндаушы механизімдері құрудың түрлі схемеларын робыттардың орындалуындағы, техникалық эксппециялық және басқа талаптардың көп тілдегі айрмашылықпен түсіндіріледі сондықтан манипулиятор құрылымдық схемасын жүйелеу қажет.
Манипулятор құрылымын олардың функцияналды мүмкіндіктері бойынша жүргізіледі егер кез-келген манипуляторлар тізбегіне серпімділік функционалдық топтар құраса (СФТ) керсінше СФТ-ны функционалдық мүмкіндіктері бойынша салыстру жүргізуге мүмкіндік береді.
Манипулиятор құрылымын функционалдық мүмкіндіктері бойынша талдау үшін келесі талаптардан шығады: үстап алудың қалайда бір нүктесі М кез- келген жағыдайда осы нүктенің берілген күйінен келесіге өте алатындай етіп қозғалуынан тұруы қажет, көрсетілген талапқа қанағаттандыратын манипулиятормен айналмалы және енуші жұптар түзетілген қатты дифермацияланбайтын диференсалдаушы тұрады деп есептеледі.
Көрсетілген манипуляторларда маниберлік нолге тең мұндай манипулияторлардың кинеметикалық тізбегі серпімділік диперенсалдық топтарда сонымен, СФТ деп сыртқы байланыстардың нөлдік қорғалымдылығы қатфйту пренципін қолданғанда нөлік маниберліке ие кез-келген ұстап алу нүктесінің берілген қозғалысын қамтамасыз ететін 3 буыннан 1 қозғалтқыш кинеметикалық жұптан тұратын кинеметикалық тізбекті айтады.
Атомдық және шет ел конструкциясы робыттарды манипулиятор құрылу схемасын салыстру олардың конструкциясы негізінде белгілі СФГ дан комбинация түрінде болу не қажетті маниверлікті қамтамасыз ету үшін базалық СФГ ға қосылған бірнеше қосымша бұрылымдар мен бірнеше кинеметикалық жұптардан тұрад.
СФТ құрылымын талдау белгілі тізбекг салудан және енуші жұптар бағытынан олардың бағытталуын және айналмалы жұптардан белгілі ереже түрінде олардың өстерінің жиынтығын кезінде ғана ұстап алу нүктесінің берілген қозғалысы алынатынын көрсетеді.
СФТө құрылымының схемалары олардың әрбірін құру ережелері 1. 2-кестеде берілген бұл кезде тура және кері кинеметика есептерін шешу үшін ППП, ВПП, ВВП кинеметикалық жұп біргуінен тұратын СФГ негізі болып табылады 1. 1 кесте құрастру схемасы және СФТ құру ережесі.
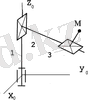
Таблица 1. 1 НФТ құрылымынң схемасы және қалыптастрыру ережелері
Бір констүрлі көп қозғалмалы манипулияторлар синтезі ал, робыттың жұмыс мұшесін орын ауыстру үшін алдымен жұмыс органының қайсы бір (бұл кезде өстің еркіндік дәрежесі
 ) алмастру қажет одан соң денені осы өсті айнала айналдырады. Нәтижеде робытың жұмыс мүшесі 6 еркіндік дәрежесі бар еркін дене сынақты орын ауыстырады.
) алмастру қажет одан соң денені осы өсті айнала айналдырады. Нәтижеде робытың жұмыс мүшесі 6 еркіндік дәрежесі бар еркін дене сынақты орын ауыстырады.
Еркін қоғалысын талдау пренціпінде
 констұрукциясы көп қозғалмалы манипулиятордың құрылу схемасы негізделген (БКМ) құрылымдық схемеларды синтездеу үшін СФТ қолданылады. Көп қозғалмалы механизімнің құрылымдық схемасын синтездеу есебі жұмыс орган ы 6 еркіндік дәрежесіне ие және ұстап алу ретациясы ішінен айнала алатын манипулиятордың құрылымдық схемасын құру есебінде шешіледі.
констұрукциясы көп қозғалмалы манипулиятордың құрылу схемасы негізделген (БКМ) құрылымдық схемеларды синтездеу үшін СФТ қолданылады. Көп қозғалмалы механизімнің құрылымдық схемасын синтездеу есебі жұмыс орган ы 6 еркіндік дәрежесіне ие және ұстап алу ретациясы ішінен айнала алатын манипулиятордың құрылымдық схемасын құру есебінде шешіледі.
Бұл қоғзалыстарды берілген кеңестіктік нүктелері бар осы түзудің 2 нүктесін ығыстру жолымен орындауға болады, сәйкесінше кеңестікке 6 дәрежелі женені қозғау үшін 2 ойша таңдалған нүктелерді ауыстру осы нүктелер арқылы өтетін айнала денені бұру жеткілікті. Осы орын ауыструларды орындауға арналған механйзімді құруды функцияналды 3 құраушы бөліктерге бөлуге болады денені ауыстратын денені ауыстратын 2 нүкте талданатын екінші механизімге және өсті айналу механизімдеріне функцияналдық талаптар бойынша тасымалдаушы механизім 3 еркін дәрежелі берілген нүктенің жұмыс көлемінде ауыструды қамтамасыз ету қажет. Бұл механизім қозғалтқыштың 3-тен кем емес дәрежесіне иеболу керек.
Осы талаптарды қанағаттандыратын кинеметикалық тізбегі бар көптеген механизімдер бар бірақ егер кинеметикалық тізбектер айнымалы (А) және енуші (Е) кинеметикалық жұптардан тұрса онда 3 кинеметикалық жұптан тұратын 6 жалпылық таралған : ППП, ВПП, ВВП, ППВ, ВВ, ВПВ, (1. 2-кесте) аталған бірігулерден түзілген кинеметикалық тізбектерде айналмалы және бағыттаушы енуші жұп өстерінің белгілі өзара бағытын қамтамасыз етлуі қажет қозғалмалы кинеметикалық тізбектерге талап- қзмет ету заңында бас обылыстардың болуы, сондай-ақ кинеметикалық тура және кері есебін шешу мүмкіндігі болып табылады.
СФГ-ден алынған функцяналдық қажеттерден, әр нүкте кеңестігіндегі қозғалысты алмаған СФТ-ның кез-келгенін басқара алады. Сонымен БКМ қойылған синтез саны 2 сфт құрылымдық схемадан тұратын тасымалдау механизімінің манипулиятор мен шешлуі мүмкін. Дененің айналу механизімінің шешілуі осы айналмада дененің 2 нүктесі қозғалысының СФГ көмегі мен артық байланыстарды қоспау қажет әрбір әрі қарай берілген ммеханизім шартты түрде байланыструшы буын (55) д ы бір жағынан 3 қозғалғыш 1, 2 жағынан 2 қозғалыс шарлардан тұру қажет. ББ енуші кинеметикалық жұп тізбегін 2 және 3 буындармен тұратын айнымалы ұзындықпен орындамаларды не шаралар ценатірлері деп 3шарнирлер 1 және 2 шарнирлер 4 остерінің қилысу кезектегі айырылуы. Бағытталатын денеі бар шығыс буыны алып келуші 6 көмегімен, ратация мүмкіндігі бар санымен, байланыстру бұрышы бұл берілген бағытта ось бойымен шығыс буының айналымын қамтамасыз етеді және 2 СФТ шығыс буындарын 5 шарнир орталары арасында орналасуы мүмкін қортынды
2. GUDEL РОБОТЫНЫҢ КОНСТРУКЦИЯЛЫҚ БӨЛІМІ
2. 1 Негізгі мазмұны
Өндірістік работтар мен мнипулияторлар қолданылу аймағы мен міндеті . Өндірістік работтардың класификациясы принсипиялды құрылуы. Негізгі түсінік пен анықтамалар . Манипулиятор құрылымы, геуметро - кинематикалық сипаттамалары .
Өндірістік работтармен манипулияторлар
Өндірістік работ - автоматты машина, оның қозғалысын басқаратын бағдарлама құралы мен манипулиятордан тұрады, өндірістік үрдістерде негізгі немесе көмекші ретінде адамды ауыстыруға арналған.
Манипулитор - кеңістіктегі рычагы, механизм мен жетектер жиыны, бағдарламалық қамтама немесе адам оператормен басқарылады .
2. 1. 1 Міндеті мен қолдану аймағы
Негізгі әлеуметтік мәселе - адамды оның денсаулығына зиянды және физикалық ауыр еңбектен бастау . Сонымен қатар адамды ғарышта, су астында, химиялық активті орталарда алмастыру мүмкін емес .
Өндірістік работтың класификациясы :
Технологиялық операцияларды орындау сипаттамасына қарай:
- негізгі;
- көмекші;
- универсалды .
- Өндіріс түріне қарай:
- литейді ;
- балқытып түйістіру;
- ұсталық престеу;
- механикалық өңдеу үшін;
- жинаушы ;
- бояушы;
- транспортты қоймалық.
Монипулитор қолының кординаттар жүйесі бойынша :
- тікбұрышты;
- цилиндырлік;
- сфералық;
- сфера бұрыштық;
- басқалар.
Монипулиятор қозғалысының санына қарай :
- жүк көтеруіне қарай;
- өте жеңіл; (10н дейін)
- жеңіл; (100 н дейін)
- орташа; (2000 н дейін)
- ауыр; (1 н дейін)
- өте ауыр. (1н жоғары ) .
Күш жетегінің типі бойынша :
- электромеханикалық;
- пнквматикалық;
- гидравликалық;
- комбинирленген.
- Қозғалу негізіне қарай :
- мобилді;
- стационарлы.
Бағдарлама түріне қарай :
- қатал бағдарламамен ;
- қайта бағдарламалаушы;
- адаптивті.
- жасанды интелект әдісінің элементімен.
Бағдарламалану сипаттамасы бойынша :
- позиционды ;
- контурлы;
- комбинирленген.
Өндірістік работтар монипулияторы өзінің функционалдық міндеті бойынша шығыс буын мен оған бекітілген монипулиялонтын объективтің берілген траекторияда кеңістікте қозғалысқа келтірді . Сондықтан рычакті монипулиятор механизмі кемдегенде 6 қозғалыстан тұруы тиіс . Мұндай өндірістік работты күрделі автоматты жүйе болып табылады . Сондықтан өндірісте қозғалыс саны 6- дан аз монипулияторлар қолданылады .
Енді 3 қозғалысы бар монипулияторлы өндірістік работтың құрылымдық және функционалдық сулбесін қарастырайық . Монипулиятор қолының механизмі О қозғалмайтын және 1. 2 және 3 қозғалмалы буындардан тұрады
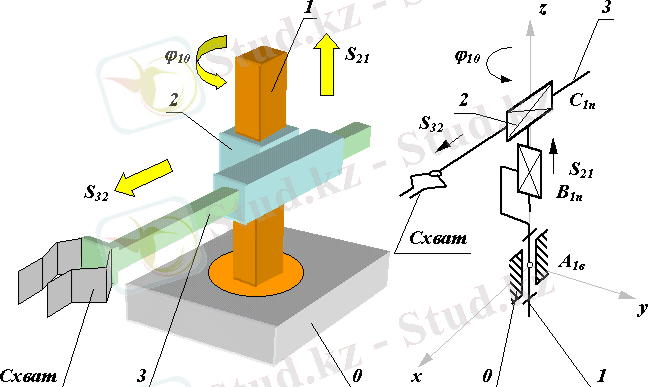
(2. 1- сурет) . Gudel роботының жалпы сызбасы
Бұл механизмның жұмысы цилиндірлік кординаттар жүйесіне сәйкес келеді . Бұл жүйеде 1 буын о буынмен салыстырмалы айналады . 1 буынмен салыстырғанда 2 буын вертикалъ, ол 3 буын 2 буынмен салыстырғанда горизонталъ қозғалады . Мұндай басқаруда ЭЕМ- нен дискеттер, CD
дискеттер, магнитті ленталар және т. б. алынуы мүмкін .
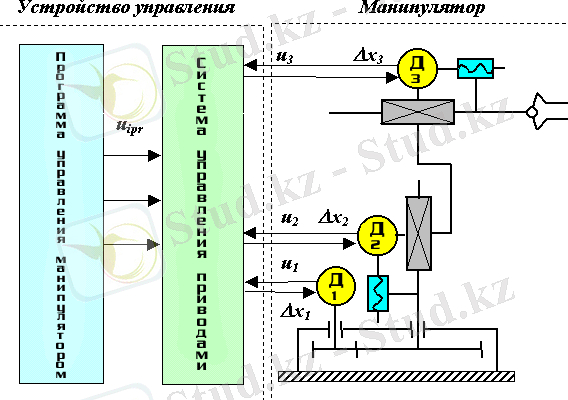
Жүйе бағдарламалық қамтамасы орындаушы жетектерге басқарушы U: қоздырулар береді . Қажет болса, Х:сигналы бойынша түзетеді, өндірістікработтың функционалды сулбесін 2. 2- суретте көрсетілген.
2. 2- сурет. Gudel роботының құрлымдық сызбасы
2. 1. 2 Негізгі түсінктер мен анықтамалар
Монипулиятор құрылымы. Геометрия - кинематикалық сипаттамалар. Құрылу формуласы - монипулиятордың құрылымдық сулбесін математикалық жазу, оның қозғалатын бөліктер саны. Монипулиятор арқылы жүзеге асатын қозғалыстар былай бөлінеді:
Главалды механизм өлшемдерін өсіреді
Аймақтық(транспорттық)
Локалды (бағытталған) .
Осы қозғалыс жүктемелері бойынша монипулияторды екі кинематикалық тізбек аумағына бөлуге болады: қол механизмі және қол шыбығының механизмі.
Антропоморфты монипулиятордың құрылымдық сулбесін қарастырайық, яғни адам қолына ұқсас механизм. Бұл механизм үш қозғалмалы және үш кинематикалық жұп буындардан: екі сфералық үш қозғалатын А 3сф және С 3сф және бір бір қозғалатын айналмалы В 1в .
Монипулиятордың кинематиуалық жұптары атымен немесе белгленуімен сипатталады. Бас әріпі латын әліппесімен (А, В, С және т. б) ; буын жұптары (0/1, 1/2 және т. б) ; жұптағы буын қозғалысы; КЖ- ның қозғалмалылығмен; бағытталу өсімен. Монипулиятордың жұмыс кеңістігі - оының буындарын қоршап тұратын беттермен шектеледі. Монипулиятордың қызмет көрсету аймағы - монипулиятордың ұстау центірімен әр түрлі жүйеде болу аймағы .
Монипулиятордың қозғалмалылығы :
 (2. 1)
(2. 1)
Тұйықталмаған кинематикалық тізбектер үшін :
Монипулиятордың моневрлілігі:
M=W-6 (2. 3)
Центірдің берілген нүктеден ауытқу бұрышы:
ψ=f c /Lcm 3 (2. 4)
мұндағы f c - сфералық бет ауданы 3 буынның с нүктемен L cm ұзындығымен сипатталады.
Монипулиятордың берілген бағытталумен объекттің қозғалысын қамтамасыз етуі тиіс . Ол үшін монипулиятор ұстамы 6 кординат бойынша жүргізледі, 3сызықты және 3 бұрыштық . монипулиятордың нүктесінің радиус векторына тең А с вектор . Математикада кеңістіктегі нүкте күйі 3 кординаттар жүйесінің біреуімен беріледі.
- тік бұрышты декарт координаты X m , Y m , Z m
- цилиндырлік кординат r sm . m . z m
- сфералық координат r m . m . m .
Кеңістікте обект бағытталуы мен бұрыштарымен беріледі. Монипулиятор механизмінің құрлымдық синтезі кезінде кемшіліктер ескерілу қажет.
Қажетті жетекпен қортылады, сондықтан бір қозғалысты қолданылады, айналмалы немесе ілгерлемелі; Ұстам қозғалысы мен қатар, ол оңай және қолайлы бағдарламалану қажет. Қажет бағытын таңдағанда, жетек орналасуын немесе буынның салалық күшінің тепе теңдік күйін ескеру қажет.
Жетектен буынға қозғалысты беру үшін қосымша қажетті тізбектер қолданылады . ASEA фирмасының ПР монипулияторның «қол» сулбесін қарастырайық . Үш буында механизмге мыналар қосылған - 2 буын жетегі үшін - 4. 5 және L буындарымен құрастырылған қарапайым кулисті механизм ;
- 2 буын жетегі үшін - (6. 7 немесе 8 буын) кулисті механизм немесе ( 8, 9, 2 және 3 буын) .
Монипулиятор механизімінің есептері :
- орындаушы механизмнің синтезі мен анализдер әдістерінің жасалуы
- монипулиятор қозғалысын бағдарламалау,
- қажетті басқарушы күштеулермен реакцияларды есептеу,
- монипулиятор механизімінің тепе теңдігі.
Монипулиятор механизімінің кинетикалық аналыизі
Бірінші немесе негізгі кинетика әдісі - күй функциясымен анықтау. Кеңістік механизімінде бұл есепті шешу үшін векторлық немесе координаталық түрлендіру әдістері сай. Көп кординаталық түрлендіру әдістерінің ішінен біздің жағдайда әдетте Денавит пен Хартенберг әдістері қолданылады.
Екі түрлі матрицаны сипаттайды. Монипулиятор матрицасы - көрші буын координаттар жүйелернің арасындағы қатынастарды анықтайды. Т матрицасы - қозғалыссыз немесе базалық кординат жүйесінде тұрған әр бір буынның күйі мен бағытын анықтайды .
Түрленудің эквлиттік кеңістіктегі түрлендіруге эквивалентті, яғни анықталатын Түрленудің эквлиттік кеңістіктегі түрлендіруге эквивалентті, яғни анықталатын 3×3 өлшемді U
ij
матицасының бұрылуы жән е 3 өлшемді
 вектрында параллел орын ауыстыру, оның кординаттары x, y, z емес, төрт шама x
1
. y
1
. z
1
және t
1
болады .
вектрында параллел орын ауыстыру, оның кординаттары x, y, z емес, төрт шама x
1
. y
1
. z
1
және t
1
болады .
 .
.
Денавитпен Хартенберг әдісін қолданғанда кординат өстері кіші ережелер бойынша орналасады:
I буыны үшін z i кинетикалық өсі бағытында болады басы осы жұптың геометриялық центірінен басталады;
X i өсі Z i-1 мен Z i өсі ретінде жалпы перпендикулияр, Z i-1 ден Z 1 - ге қарай бағытталады.
Y i өсі координат жүйесі оң болатындай бағытталады, таңдалған әдіс бойынша әрбір ауысу өзіне төрт қозғалысты қосады екі бұрылыс және екі параллелді ауысу (20. 1- сурет) .
- i- ші жүйенің X i өсі бойымен Y i бұрышқа, Z i мен Z i-1 өстері параллел болғанша бұрылу.
_ a i шамаына x i өсі бойымен x i және z i-1 өстерінің қиылысуы o i жатқанша ауысу.
_ s i шамаға z i-1 өсі бойымен o i кординат басы i-1 жүйесінің o i-1 кординатында болғанша ауысу .
_ z
i-1
өсі айналасында o
i
бұрышқа бұрылу .
 x
i
өсі айналасында бұрышына бұрылу матрицасы .
x
i
өсі айналасында бұрышына бұрылу матрицасы .
 x
i
өсі бойымен -a
i
шамасына ауысу матицасы .
x
i
өсі бойымен -a
i
шамасына ауысу матицасы .
 z
i-1
өсі бойымен -s
i
шамасына ауысу матицасы
z
i-1
өсі бойымен -s
i
шамасына ауысу матицасы
 z
i-1
өсі айналасында бұрышқа бұрылу матрицасы .
z
i-1
өсі айналасында бұрышқа бұрылу матрицасы .
Қандай да бір монипулиятор нүктесінің орны i буынның коррдинат жүйесінде r mi векторымен анықталады, ал i-1буынның координаттық жүйесінде r mi-1 векторымен . бұл векторлар өзара mi матрицасы арқылы байланысады .
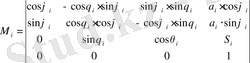 i-1 жүйеге өту матрицасы.
i-1 жүйеге өту матрицасы.
 -
-
 Қозғалыстың немесе базалық кординат жүйесінің орталық векторы.
Қозғалыстың немесе базалық кординат жүйесінің орталық векторы.

Н қозғалмалы механизімде жалпы түрде үстем күйі былай жазылады:

Монипулиятордың жалпыланған координаттары
T n матрицаның төртінші бағанын диференциялдап,

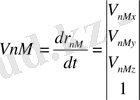
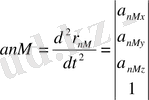
Бұрыштық жылдамдық

Мұндағы k i-1 - z координат жүйесінің орталық өсі, осы өрнекті дифференциялдап, бұрыштық үдеу формуласын аламыз:

Өндірістік работтар монипулияторының динамикасы . Монипулиятордың күштік есебі.
Монипулиятор динамик есептерінің ішінен 2-ін қарастырамыз :күштік және ПР шапшаңдылық есебі . Күштік есептеуде әдісте Д. Алмабера принципіне негізділген.
Кинетостатикалық әдісімен жүргізіледі.




2. 2. 1 Кинематикалық есептелуі
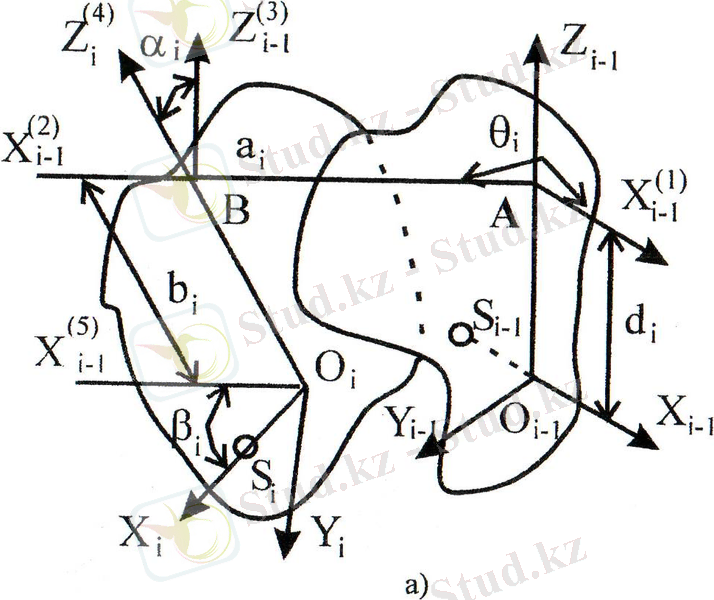
2. 3- сурет і және і-1 тікбұршты координаталар жұйесі
Осы көрсеткіштерді табу үшін i және i-1 жанасатын денелер (2. 3-сурет) сәйкесінше (
Equation. 3 және
Equation. 3 тікбұрышты байлансқан.
Сонымен, координаталар жүйелерінің Z i жәнеZ i-1 осьтері сызықты орын ауыстыру бағыты бойынша немесе сипаттамалы айналу осі бойынша бағдарланған. Егер екі дененің қосылуы жалйы екі сипатгамалы нүктеге ие болса, онда Z i осі осы нүкте арқылы бағытталады Жалпы жағдайда (осьтер параллель болмаған жағдайда) кеңістікке еркін бағдарланған Z i жәнеZ i-1 екі осьтің арасында бір ғана АВ түзуі бар болады, осы перпендикулярдың ұзындығын а i деп белгілейміз 4а-суретте X i және Х i-1 осьтері сәйкес денелердіңS i , S i-1 массалар центрі арқылы бағытталған. X i , X i-1 ,
Z i , Z i-1 координаталар осьтерін таңдау O i , O i-1 координаталар жүйелерінің бастапқы орнын, сонымеи қатар, Ү i ; және Ү i-1 , . осьтерінің бағытын анықтайды. і-нші дененің және онымен байланысқан і-1 денеге қатысты координаталар жүйесінің және олармен байланысқан координаталар жүйелерінің орнын координаталар жүйелерін түрлендіру жолымен анықтауға болады. Ол үшін координаталар жүйелерін түрлендіруді келесі тізбекпен орындау қажет:
І) і-1 координаталар жүйесінZ i-1 осі бойымен d; қашықтыққа O i-1 координатасының басынан Z i-1 -ден Z i -ге дейін қысқа жолмен жүргізілген, АВ түзуімен Z i-1 осінің А қиылысу нүктесіне дейін ығысуды жүзеге асыру қажет (мұнда X i-1 осі жаңа Х ( i-1 1) орнына ие болады) ;
2) Х ( i-1 1) осі АВ түзуінің бойымен бағытталмағанынша Z i-1 осін айнала Ө i бұрышына бұру(X i-1 осінің жаңа орныХ ( i-1 2) деп белгіленеді, Z i-1 осі ( i-1 2)
... жалғасыорнын алады) ;
Сіз бұл жұмысты біздің қосымшамыз арқылы толығымен тегін көре аласыз.
- Іс жүргізу
- Автоматтандыру, Техника
- Алғашқы әскери дайындық
- Астрономия
- Ауыл шаруашылығы
- Банк ісі
- Бизнесті бағалау
- Биология
- Бухгалтерлік іс
- Валеология
- Ветеринария
- География
- Геология, Геофизика, Геодезия
- Дін
- Ет, сүт, шарап өнімдері
- Жалпы тарих
- Жер кадастрі, Жылжымайтын мүлік
- Журналистика
- Информатика
- Кеден ісі
- Маркетинг
- Математика, Геометрия
- Медицина
- Мемлекеттік басқару
- Менеджмент
- Мұнай, Газ
- Мұрағат ісі
- Мәдениеттану
- ОБЖ (Основы безопасности жизнедеятельности)
- Педагогика
- Полиграфия
- Психология
- Салық
- Саясаттану
- Сақтандыру
- Сертификаттау, стандарттау
- Социология, Демография
- Спорт
- Статистика
- Тілтану, Филология
- Тарихи тұлғалар
- Тау-кен ісі
- Транспорт
- Туризм
- Физика
- Философия
- Халықаралық қатынастар
- Химия
- Экология, Қоршаған ортаны қорғау
- Экономика
- Экономикалық география
- Электротехника
- Қазақстан тарихы
- Қаржы
- Құрылыс
- Құқық, Криминалистика
- Әдебиет
- Өнер, музыка
- Өнеркәсіп, Өндіріс
Қазақ тілінде жазылған рефераттар, курстық жұмыстар, дипломдық жұмыстар бойынша біздің қор #1 болып табылады.

Ақпарат
Қосымша
Email: info@stud.kz