Жол талғамайтын алты дөңгелекті мобильді ғарыштық роботтың қозғалту жүйесін жобалау және прототиптеу

АЛМАТЫ ОБЛЫСЫ ЖАМБЫЛ АУДАНЫ
«Ақсеңгір ауылының орта мектебі»
коммуналдық мемлекеттік мекемесі
ЖОЛ ТАЛҒАМАЙТЫН КӨЛІКТІҢ
МОДЕЛІН ҚҰРАСТЫРУ
Бағыты Робототехника
Шығармашылық
жетекшісі Хаумен А.
математика, информатика
пәнінің мұғалімі
Орындаған: Хаумен Бекжан
11 сынып оқушысы
2023
А Б С Т Р А К Т
Зерттеудің мақсаты:
Мобильді ғарыштық роботтардың қозғалу бөліктерін зерттеу және алты дөңгелекті мобильді ғарыштық роботтың прототип моделін әзірлеу.
Гипотеза (болжам) :
Жалпы қазіргі таңда алыс шетел және жақын шетел мемлекеттерінің білікті ғалымдары өтімділігі жоғары роботтарды зерттеуге, оны құрастыруға көп назарларын аударуда. Роботтың сенімді басқарылуы үшін орнықты түрде жермен үздіксіз байланыста болуы және бет бойынша жылдамдықпен кедергілерден орын ауыстыра алуы, осы сияқты факторлар дипломдық жұмысымды өзекті ете алады.
Зерттеудің кезеңдері:
- Зерттеу жұмысының жоспарын құру
- Мобильді роботтың аспасының моделі «Autodesk» бағдарламасы арқылы 3D өлшемде жасап құрастыру
- Мобильді роботтың прототип моделін жасау
- Мобильді роботтың кинематикасын шығару
- Мобильді роботтың басқару бағдарламасын Arduino платформасында
- Мобильді роботты тәжірибе жүзінде тексеру, оның қолданысқа енгізу.
Тәжірибенің әдіс-тәсілдері:
- Жалпы ғылыми тәсілдер: әдебиеттерге талдау жасау, салыстыру, сараптама жасау, жалпылау;
- Арнайы әдіс-тәсілдер: стандартты программалау, әлеуметтік талдау жасау;
Жаңалық:
Жұмыстың басты жаңалығы - қарапайым қолданыстағы материалдарды пайдалана отырып, ғарыштық роботтың моделін құрастырсақ - бұл отандық ғарыш саласының дамуына да өз үлесін қосар еді.
Жұмыс нәтижесі:
Қарапайым қолданыстағы материалдарды пайдаланып құрастырылған көліктің моделі.
Нәтиженінің қолданылу саласы:
Жұмыстың нәтижелерін робототехника, ғарыш, машина жасау салаларында пайдалануға болады.
КІРІСПЕ
Ғарышты игеру автоматты басқару жүйелерін құруға үлкен серпін берді және роботтың ғарыштық ортада жұмыс істеу үшін адам алдындағы артықшылығының бірі болды. Роботқа ғарыштық сәуле сияқты сыртқы қолайсыз жағдайлар әсер етпейді. Жұмыс қосымша ресурстарды қажет етпейді, әдетте ол күн батареяларымен жұмыс істейді. Робот жер бетінен топырақ жинау, сканерлеу және жерге деректерді жіберу сияқты механикалық жұмыстарды орындау үшін өте қолайлы бощып табылады. Өздігінен жүретін марсоходтарды Марсқа жіберудің алғашқы әрекетін 1960 жылы КСРО-да жасалынған болатын, бірақ «1М» кеңестік ғарыш құрылғысының ұшу әрекеті сәтсіз болды. Себебі ғарышқа ұшып шыға алмаған болатын.
Curiosity марсоходы - 2011 жылы Кейп Канавералдан шыққан мобильді зертхана. Curiosity Марстың бетіне 2012 жылдың 6 тамызында қонды. Бұл NASA Марсқа қондырған ең үлкен марсоход болды. Ол процессорларынан екі есе ұзын және бес есе ауыр болды. Қосымша мөлшеріне қарамастан, Curiosity алдыңғы буыннан көптеген дизайн элементтерін алды, мысалы, алты дөңгелек, рокер аспасы және марсоход мачтасына орнатылған камералар, миссия командасына марсоходты бағыттауға көмектесу үшін. Алайда, алдыңғы буыннан айырмашылығы, Curiosity құрамында Марстағы топырақ пен тау жыныстарын талдауға арналған ішкі зертханасы бар. NASA Curiosity жобасын жасады, ол биіктігі 65 сантиметрге дейін кедергілерді жеңіп, Марс рельефі арқылы күніне 200 метрге дейін жүре алады. Curiosity өзінің электр қуатын радиоизотоптық термоэлектрлік генератордан алды.
Осы миссия аясында 2012 жылдың тамызында «Curiosity» Марсоходы Марстың бетіне түсірілді. Қону кезінде алғаш рет "аспан краны" технологиясын қолданды.

1 - сурет. «Curiosity» марсоходы
Біріншіден, модуль қосымша платформамен бірге парашютпен түсіріліп. Төмен биіктікте парашют атылып, реактивті қозғалтқыштар платформаның өзінде іске қосылды. Марс бетінен бірнеше ондаған метр биіктікте «аспан краны» арқылы марсоходты арқандарға түсіріп, сосын ол ұшады. Бұл технология қонуды мүмкіндігінше жұмсақ етуге мүмкіндік берді, бұл зерттеу жабдықтары үшін маңызды болды. Алты дөңгелекті құрылғы бір жыл Марста өмір сүру белгілерін іздейді деп жоспарланған болатын, бірақ миссия ұзартылған болатын.
Sojourner марсоходы - 1997 жылы 4 шілдеде Оксиа Палус төртбұрышының Крис-Планития аймағындағы Арес-Валлис каналына қонған роботты марсоход. «Соджорнер» Марста 92 күн болды. Бұл жерден басқа планетада саяхаттаған және Mars Pathfinder миссиясының бөлігі болған алғашқы дөңгелекті марсоход болды.
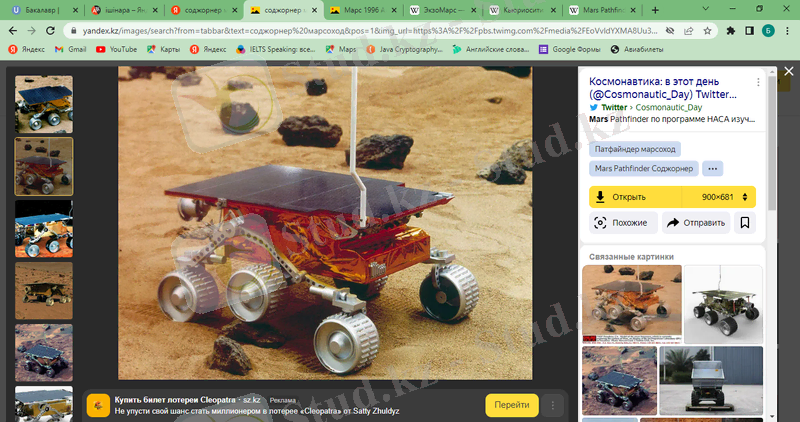
2 - сурет. Sojourner марсоходы
Марсход алдыңғы және артқы камералармен, сондай-ақ бірнеше ғылыми тәжірибелер жүргізу үшін қолданылатын жабдықтармен жабдықталған. Марсоход жермен Pathfinder базалық станциясы арқылы байланысқа шықты, ол өзінің соңғы сәтті байланыс сеансын 1997 жылы 27 қыркүйекте Гринвич таңғы сағат 3:23-те өткізді Марстың бетіне қонған кезде NASA-ның ғарыштық зерттеулер саласындағы беделін қалпына келтірген алғашқы тәуелсіз Марсоход болды. Марсоходтың соңғы расталған командасы 1997 жылдың 5 қазанына дейін тұрып, содан кейін қону модулін айналып өту болды. Оның Cоңғы сигналы 1997 жылдың 7 қазанында таңертең алынған болатын Ол 8, 5 миллионнан астам атмосфералық өлшемдер мен 550 суретті қоса алғанда, көптеген мәліметтер жинады.
ATHLETE (All-TerrainHex-Limbed Extra - Terrestrial Explorer-NASA-ның жаңа туындысы, ол ай немесе Марс беті арқылы жүк тасымалдауға жауап береді. Әзірге биіктігі 4, 57 М, массасы 2300 кг және максималды жылдамдығы 2км/сағ болатын прототип дайын. BroDude. ru доңғалақтарда жеті «аяғы» бар. Егер ол салыстырмалы түрде тегіс жерде болса, ол Марсты зерттей отырып, оңай айналады, егер оның жолында кедергі болса, ол жай ғана оны басып оза алады. Пайдалануға берілген күні 2017 жыл болды.
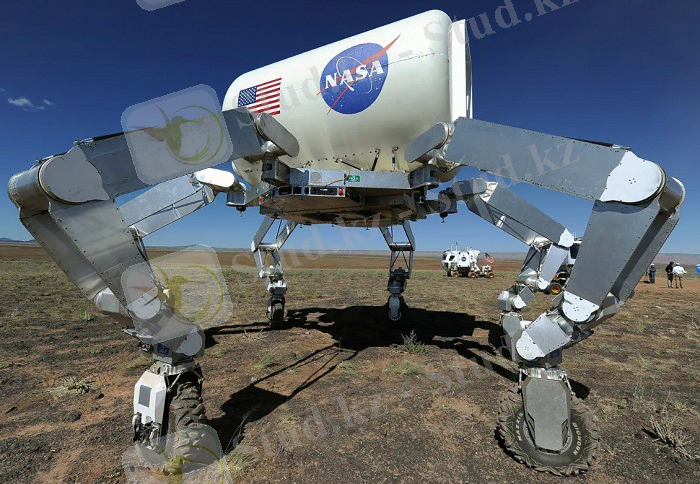
3-сурет. «ATHLETE» луноходы
Perseverance - NASA ғарыштық агентігінің «Марс 2020» миссиясы аясында Марстағы Джезеро кратерін зерттеуге арналған марсоход. Оны реактивті қозғалыс зертханасы жасап шығарып, 2020 жылдың 30 шілдесінде сағат 11:50-де іске қосылған болатын. Марсоход Марсқа 2021 жылдың 18 ақпанында 20:55 UTC-де сәтті қонғаны туралы ақпарат алынды. 2022 жылдың 4 сәуіріндегі жағдай бойынша Perseverance іске қосылды. Марста ол қонған сәттен бастап 399 күн белсенді жұмыс істеуде.
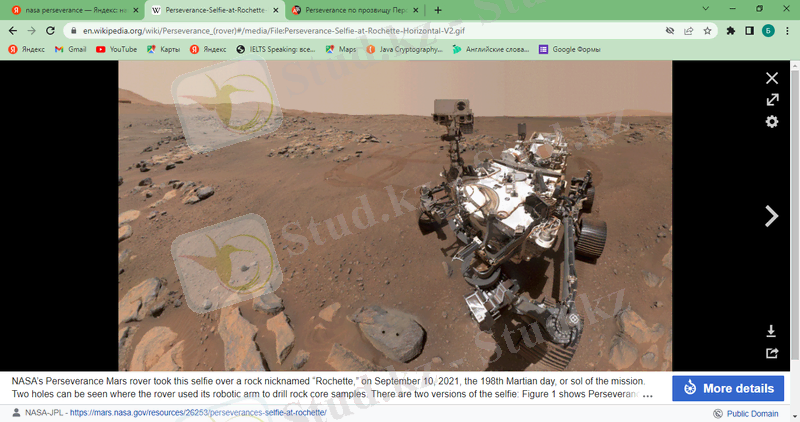
4-сурет. Perseverance марсоходының марстағы көрінісі
НЕГІЗГІ БӨЛІМ
Мобильді роботтың қозғалту бөліктерін жобалау
Жалпы бұл зерттеу жұмыстың басты мақсаты - жол талғамайтын мобильді ғарыштық роботтың моделін жасау, соның ішінде қозғалу бөлігінің құрамды бөліктерін құрастыру болмақ.
Мобильді ғарыштық роботтар нақты жол болмайтын, кедір-бұдыр, тас-құмды жерлермен жүретіндіктен қозғалу бөліктері, соның ішінде дөңгелектерінің аспаларының құрылымы өте маңызды роль атқарады. Сондықтанда осы зерттеу жұмыс барысында 6 дөңгелекті роботтың моделін жасадық (5 - сурет) . Бұл жұмыс барысында негізгі бағыт роботтың дөңгелектері бекітілетін аспаның үлгісін құрастыруға бағытталды.
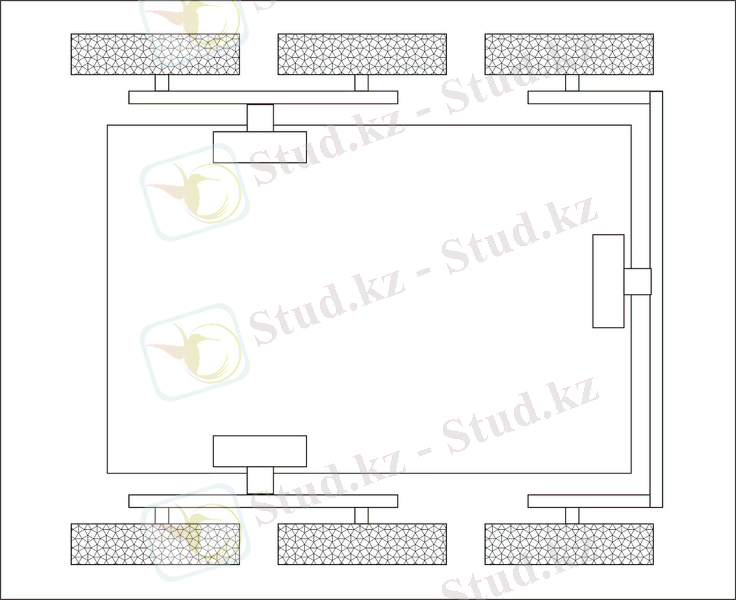
Мобильді роботымыз 6 дөңгелекті (3х3) . Алдыңғы 4 дөңгелегі қос-қостан бір аспаға бекітілген. Артқы екі дөңгелегі жеке бір аспаға бекітілген (6 - сурет ) .

5 - сурет. Мобильді роботтың сыртқы көрінісі
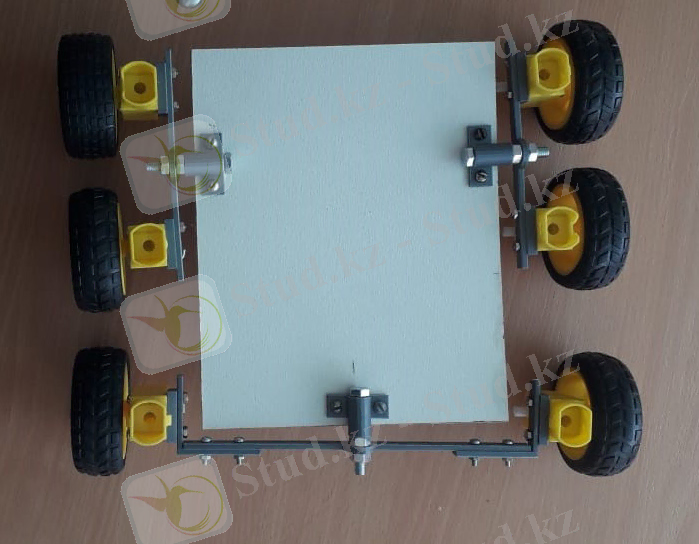
6 - сурет. Мобильді роботтың үстінен қарағандағы көрінісі
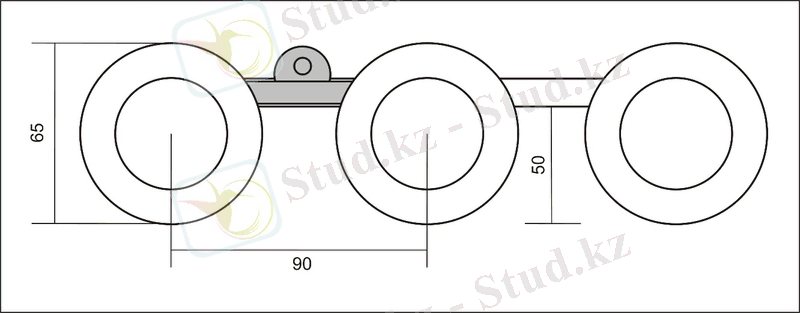
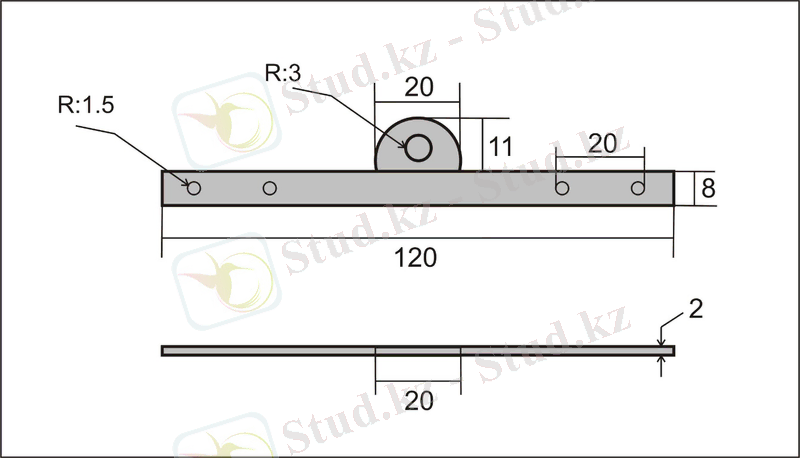
Бір аспаға екі дөңгелек бекітіледі. Бұл өз кезегінде дөңгелектердің жол бойындағы әртүрлі кедергілерді басып өтуіне мүмкіндік береді. Аспаның жеке сұлбасын tinkercad. com - сервисі (AutoDesk) арқылы жобаланып, жасалынды (7 - сурет) .
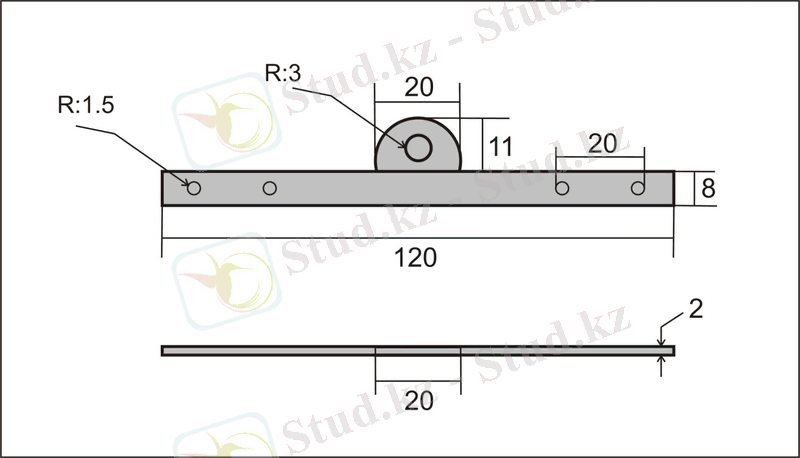
7 - сурет. Алдыңғы дөңгелектің аспасының сызбасы
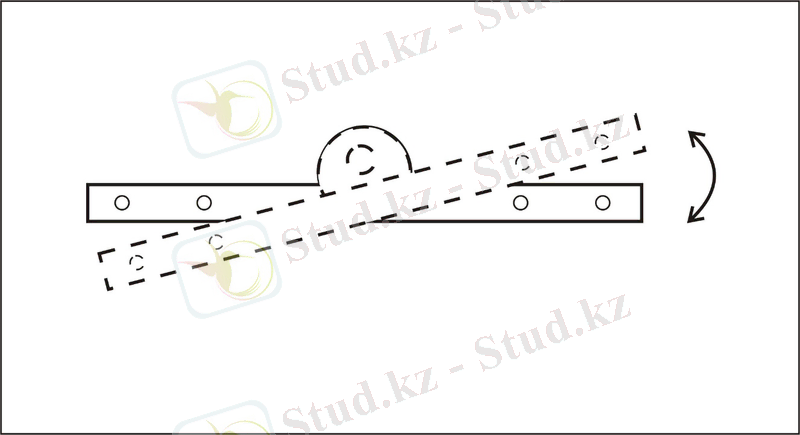
Аспаның негізгі міндеті - оған бекітілген дөңгелектердің жоғары төмен бағытта қоғалуына мүмкіндік жасау (8 - сурет) .
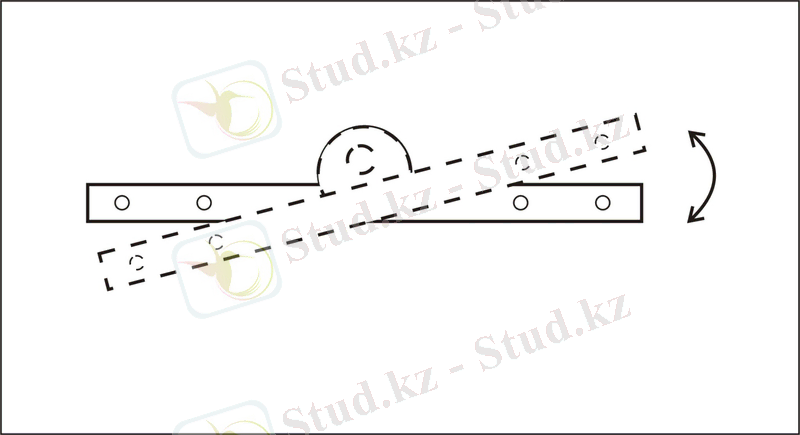
8 - сурет. Аспасының қозғалу бағытының сызбасы
Алынған сұлба 3D принтер арқылы басылып шығарылды (9 - сурет) .
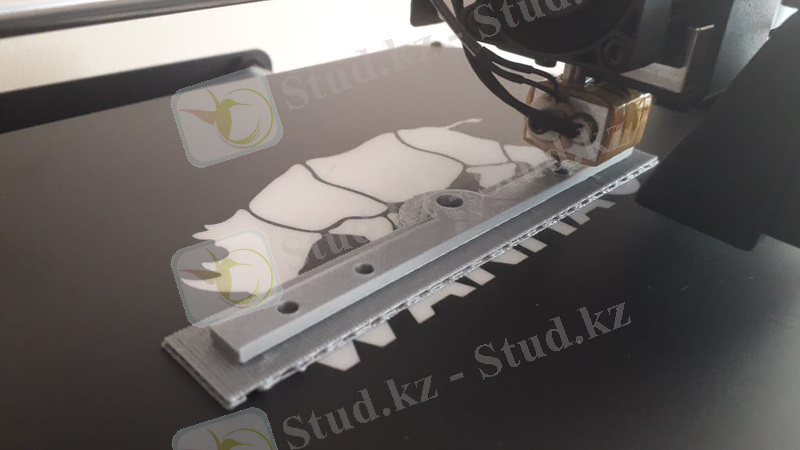
9 - сурет. Аспаның 3D принтерден басылып шығуы
Жобаланған роботтың дөңгелектері ретінде арнайы жасалынған дайын бөлшектер мен арнайы моторлар қолданылды (10 - 12 суреттер) .

10 - сурет. Мобильді роботтың жанынан қарағандағы көрінісі

11 - сурет. Мобильді роботтың артынан қарағандағы көрінісі
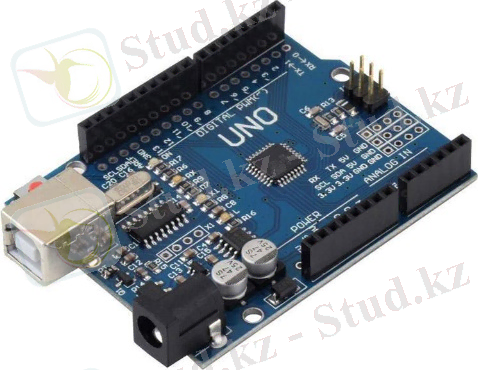
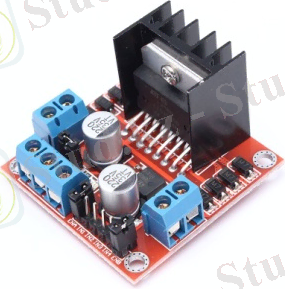
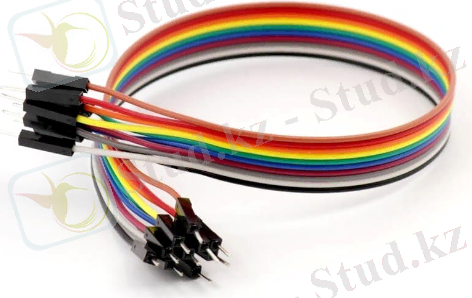
Мобильді роботтың жүрісін басқару үшін арнайы электроникалық бөлшектер қолданылып, программа құрастырылып жазылды (12 - сурет) . Роботтың жүрісін басқару үшін Arduino Uno микроконтроллері қолданылды. Роботта қолданылған құрамды бөлшектердің тізбесі Кесте 1-де көрсетілген.

12 - cурет. Мобильді роботтың электроника бөлшектерімен көрінісі
Кесте 1. Құрамды бөлшектердің тізімі



Мобильді роботтың қозғалысын басқаруға арналған программа Arduino IDE программалау ортасында құрастырылып жазылды. Программаның коды Косымша 2-де көрсетілген.
Қорытынды
Бұл зерттеу жұмыстың басты мақсаты мобильді роботтың қозғалту бөліктерін жобалап, сол бойынша роботтың шағын моделін құрастыру болып еді. Алға қойылған міндеттер бойынша барлық жоспарланған жұмыстар толығымен атқарылды.
Алыс және жақын шетел мемлекеттеріндегі ғарыштық роботтарға әдебиеттік шолу жасалынып, олардың техникалық сипаттамасы зерделенді. Осы жинақталған мәліметтер негізінде жобаның негізгі сипаттамаларын алынды.
Алдымен мобильді роботтың қозғалту бөлігі, соның ішінде дөңгелектер бекітілетін аспасының үлгісі жобаланды. Үлгі дөңгелектердің жер бетіндегі әртүрлі қыртыстарды кедергісіз басып өтуіне ыңғайлы ретінде жобаланып сызылды. Алынған сызба AutoDesk платформасында 3 өлшемде сызылынып, алынған сызба файл 3D принтерге басып шығару форматына экспортталынды. Осылайша дөңгелек бекітілетін құрамды бөліктердің барлығы 3D принтерде басылып шығарылды. Алынған құрамды бөліктер арнайы жасалынған рамаға темір болтылар арқылы бекітілді. Оған дайын дөңгелектер мен мотрлар және электроника бөлшектері бекітілді.
Мобильді роботтың қозғалысын басқару үшін Arduino платформасында арнайы программа құрастырылды. Осы программа арқылы мобильді роботты жүргізіп, арнайы сынақтардан өткізілді.
Болашақта бұл жұмысты ары қарай жалғастыру жоспарланып отыр. Осы алынған нәтижелер бойынша тағы басқадай да роботтардың қозғалу бөліктерін жобалауға болады деп ойлаймын.
ҚОСЫМША 1
МОДЕЛЬ СЫЗБАЛАРЫ
1 - сурет. Модельдің жалпы түрі
2 - сурет . Модельдің үстінгі жағынан көрінісі
3 - сурет. Алдыңғы дөңгелектің аспасының сызбасы
4 - сурет. Аспасының қозғалу бағытының сызбасы
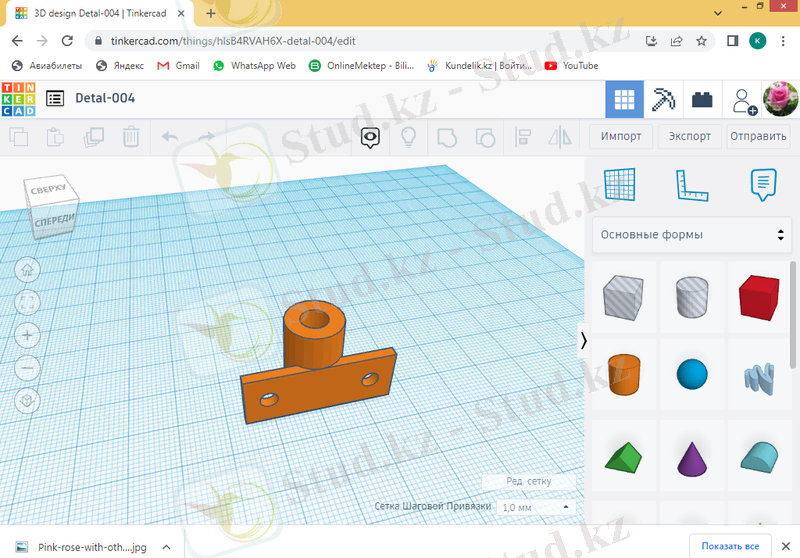
5 - cурет. Қосымша бөліктердің AutoDesk ортасында жобалануы
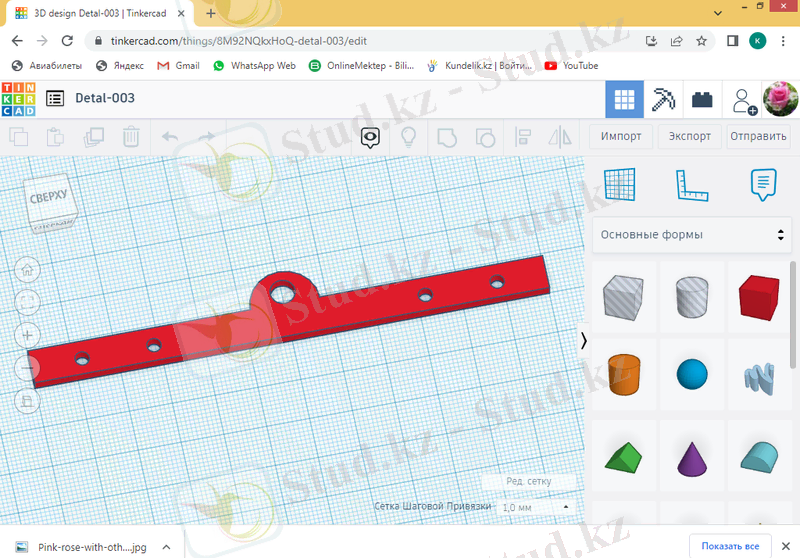
6 - сурет. Қосымша бөліктердің AutoDesk ортасында жобалануы
ҚОСЫМША 2
Arduino микроконтроллеріне арналған программалық код
#define pinX A0
#define pinY A1
int in1 = 7;
int in2 = 8;
int in3 = 5;
int in4 = 6;
int x_min;
int x_max;
int y_min;
int y_max;
void setup() {
pinMode(ENA, OUTPUT) ;
pinMode(ENB, OUTPUT) ;
pinMode(in1, OUTPUT) ;
pinMode(in2, OUTPUT) ;
pinMode(in3, OUTPUT) ;
pinMode(in4, OUTPUT) ;
int x = analogRead(pinX) ;
int y = analogRead(pinY) ;
x_min = x - 30;
x_max = x + 30;
y_min = y - 30;
y_max = y + 30;
}
void loop() {
int x = analogRead(pinX) ;
int y = analogRead(pinY) ;
if (y < y_min ) {
int sh = map(y, y_min, 0, 0, 255) ;
Motor(sh, HIGH, LOW, HIGH, LOW) ;
}
else if (y > y_max ) {
int sh = map(y, y_max, 1024, 0, 255) ;
Motor(sh, LOW, HIGH, LOW, HIGH) ;
}
else if (x < x_min ) {
int sh = map(x, x_min, 0, 0, 255) ;
Motor(sh, HIGH, LOW, LOW, HIGH) ;
}
else if (x > x_max ) {
int sh = map(x, x_max, 1024, 0, 255) ;
Motor(sh, LOW, HIGH, HIGH, LOW) ;
}
else
{
Motor(0, LOW, LOW, LOW, LOW) ;
}
}
void Motor(byte enb, bool n1, bool n2, bool n3, bool n4) {
analogWrite(ENA, enb) ;
digitalWrite(in1, n1) ;
digitalWrite(in2, n2) ;
analogWrite(ENB, enb) ;
digitalWrite(in3, n3) ;
digitalWrite(in4, n4) ;
}
Сіз бұл жұмысты біздің қосымшамыз арқылы толығымен тегін көре аласыз.
- Іс жүргізу
- Автоматтандыру, Техника
- Алғашқы әскери дайындық
- Астрономия
- Ауыл шаруашылығы
- Банк ісі
- Бизнесті бағалау
- Биология
- Бухгалтерлік іс
- Валеология
- Ветеринария
- География
- Геология, Геофизика, Геодезия
- Дін
- Ет, сүт, шарап өнімдері
- Жалпы тарих
- Жер кадастрі, Жылжымайтын мүлік
- Журналистика
- Информатика
- Кеден ісі
- Маркетинг
- Математика, Геометрия
- Медицина
- Мемлекеттік басқару
- Менеджмент
- Мұнай, Газ
- Мұрағат ісі
- Мәдениеттану
- ОБЖ (Основы безопасности жизнедеятельности)
- Педагогика
- Полиграфия
- Психология
- Салық
- Саясаттану
- Сақтандыру
- Сертификаттау, стандарттау
- Социология, Демография
- Спорт
- Статистика
- Тілтану, Филология
- Тарихи тұлғалар
- Тау-кен ісі
- Транспорт
- Туризм
- Физика
- Философия
- Халықаралық қатынастар
- Химия
- Экология, Қоршаған ортаны қорғау
- Экономика
- Экономикалық география
- Электротехника
- Қазақстан тарихы
- Қаржы
- Құрылыс
- Құқық, Криминалистика
- Әдебиет
- Өнер, музыка
- Өнеркәсіп, Өндіріс
Қазақ тілінде жазылған рефераттар, курстық жұмыстар, дипломдық жұмыстар бойынша біздің қор #1 болып табылады.

Ақпарат
Қосымша
Email: info@stud.kz