Соққы білдектің механизмдерін жобалау және олардың құрылымдық-кинематикалық талдауы

Ф. 7. 04-02
ҚАЗАҚСТАН РЕСПУБЛИКАСЫ ҒЫЛЫМ ЖӘНЕ ЖОҒАРЫ БІЛІМ МИНИСТРЛІГІ
М. ӘУЕЗОВ АТЫНДАҒЫ ОҢТҮСТІК ҚАЗАҚСТАН УНИВЕРСИТЕТІ

«Механика және мұнайгаз ісі» факультеті
«Механика және машинажасау» кафедрасы
Курстық жобаға
ТҮСІНДІРМЕ ЖАЗБА
Жоба тақырыбы : « Поршеньді сорғыштың механизмдерін жобалау»
Пәні: «Машиналар мен механизмдер теориясы»
БББ: 6B07120 - Машина жасау.
Орындаған: Мұқанбетғали Абай Мырзағалиұлы, ММГ-22-2К тобы
(Студенттің аты-жөні, тобы)
Жетекші : Мырзалиев Д. С. т. ғ. к., доцент.
( Оқытушының аты-жөні, ғылыми дәрежесі, атағы)
Жоба
бағасы
бағасына қорғалды
«» 2023ж.
Норма бақылаушы:
(аты-жөні, қолы)
Комиссия мүшелері:
(аты-жөні, қолы)
(аты-жөні, қолы)
Шымкент 2023ж.
Ф. 7. 04-02
ҚАЗАҚСТАН РЕСПУБЛИКАСЫ ҒЫЛЫМ ЖӘНЕ ЖОҒАРЫ БІЛІМ МИНИСТРЛІГІ
М. ӘУЕЗОВ АТЫНДАҒЫ ОҢТҮСТІК ҚАЗАҚСТАН УНИВЕРСИТЕТІ
«Механика және машинажасау» кафедрасы
Курстық жобаға
«Бекітемін»
Механика және машинажасау
кафедрасы меңгерушісі
Мырзалиев Д. С.
«08» 09. 2023 ж.
ТАПСЫРМА № 11/1
Жоба тақырыбы : « Соққы білдегін жобалау»
Пәні: «Машиналар мен механизмдер теориясы»
Cтудент Мұқанбетғали Абай Мырзағалиұлы, ММГ-22-2К тобы
Кинематикалық сұлбасы:
Берілген мәліметтер: = 260 м, = 0, 21 м, , , , , ,
Негізгі әдебиеттер:
Тапсырманың берілген мерзімі: «08» 09. 2023 ж.
Жобаны қорғау мерзімі: «15» 12. 2023 ж.
Жоба жетекшісі: т. ғ к., доцент Мырзалиев Д. С.
(қызметі, Т. А. Ж., қолы)
Тапсырманы орындауға алды: Мұқанбетғали Абай Мырзағалиұлы
МАЗМҰНЫ
КІРІСПЕ
Машина жасауды айтарлықтай деңгейде қалыптастыру дәрежесі мемлекеттің технологиялық прогресс жолындағы жетістіктерін, қоғамдастықтың заттай мүлкін ұлғайтуды, тұрғындардың әл-ауқатын жақсартуды, сондай-ақ жұмыс жағдайларын белгілейді. Осы себепті мемлекеттің қаржылық және қоғамдық қалыптастыру жобаларында Машина жасауды қалыптастыруға үлкен қызығушылық бар, бірыңғай автомобильдерді, сондай-ақ ғылыми-техникалық әрекеттерді жақсарту, өте тиімді автомобильдерді, жабдықтарды, механикаландыруды қамтамасыз ететін құрылғыларды қалыптастыруға ауысуды кезектесіп жүзеге асыру, сондай-ақ өндірістің барлық салаларын автоматтандыру, оларды жаһандық пайдалану мақсаты қойылған.
Ғылыми-техникалық прогрестің қазіргі үлкен шарттарына сәйкес келетін сарапшыларды ұйымдастыру-ең маңызды мәселе.
Машина жасау саласындағы мамандарға автомобильдер мен элементтер (ММТ) тұжырымдамасының дағдылары қажет, сонымен қатар соңғы механизмдерді жобалайтын инженер-конструкторлар, сонымен қатар аппаратура, сонымен қатар Машина жасау саласында жұмыс істейтін инженер-механиктер, сондай-ақ оларды пайдалану, сонымен қатар сабақтың көптеген салаларында.
Әр түрлі құрылғыларда, автомобильдерде, сондай-ақ механикалық бағыттарда қолданылатын элементтерді жетілдіруде, соңғы автомобильдердің бизнес-жобаларын зерттеуде, сондай-ақ қазіргі жағдайларға сәйкес келетін элементтерде ММТ ерекше рөл атқарады.
Автомобильдер мен элементтер тұжырымдамасы қазіргі негізгіні зерттейді аппаратура бірыңғай негіздер негізінде және механика заңдары сонымен қатар арнайы элементтер тұжырымдамасын қалыптастыру тәсілдерін әзірлейді. Автомобильдер мен элементтер тұжырымдамасына сәйкес курстық жұмыс осы Ысырма жылдамдығын зерттеудің конфигурациясы болып саналады және мұнда Ысырма жылдамдығының негізгі сегменттері көрінеді.
Соққы білдегінің механизмі туралы мәлімет
Соққы білдектері металдарды арнайы кескіштердің көмегімен кесу арқылы механикалық өңдеуге арналған. Білдектердың бұл тобы стандартты жабдықта жасалуы мүмкін шектеулі операцияларға байланысты жоғары мамандандырылған болып табылады.
Соққы білдектері артық материалды алу арқылы әртүрлі профильдер жасауға арналған тар профильді жабдыққа жатады.
Негізгі түйін-соққы кескіш-жұмыс бетіне перпендикуляр тік жазықтықта алға-артқа қозғалыстар жасайды. Барлық басқа қозғалыстар қазіргі уақытта соққы білдектерінде өңделетін жұмыс бетіне бекітілген бөлікпен жүзеге асырылады. Өңделетін дайындаманың өлшемдері білдектің жұмыс бетінің параметрлерімен шектеледі. Машинаның жалпы өлшемдері кескіш бекітілген соққының ең үлкен жүрісімен және арнайы үстелдің рөлін атқаратын жұмыс бетінің диаметрімен шектеледі.
Кескіштің қозғалысы электрлік, механикалық немесе гидравликалық жетектің арқасында жүзеге асырылады. Әдетте, шағын станоктар механикалық жетекпен, ал гидравликалық - үлкен өнеркәсіптік қондырғылармен жабдықталған. Механикалық жетек көп жылдамдықты электр қозғалтқыштарына қосылған айналмалы сахнаның арқасында қозғалады.
Білдектің негізгі тораптары мен басқа элементтері шойын төсегіне мықтап бекітілген. Кейбір соққы білдектері модельдерінде жұмыс үстелін реттеу тек стандартты режимде ғана емес, сонымен қатар 60 градус бұрышта да жасалуы мүмкін.
МЕХАНИЗМНІҢ ҚҰРЫЛЫМДЫҚ ТАЛДАУЫ
Механизмге құрылымдық талдау жасаған кезде қозғалатын немесе қозғалмайтын звенолар санын, кинематикалық жұптар класын және еркіндік дәреже санын анықтаумыз қажет. Механизмді Ассур топтарына жіктеп, қандай класқа және қандай түрге жататындығын білуіміз қажет.
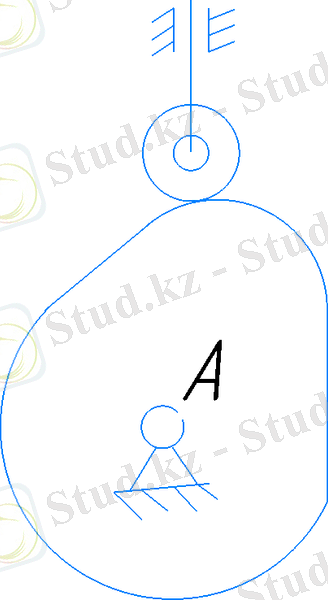
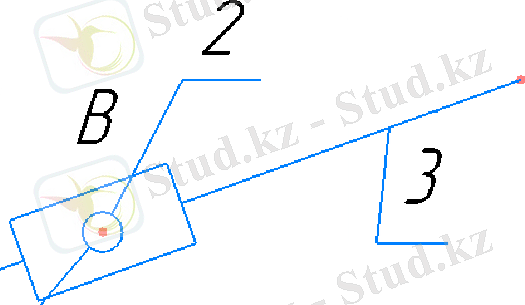
Маған Соққы білдегінің иехонизмы берілді (сурет 1. 1) .
Сурет 1 - Соққы білдегінің мехонизмы
Бұл механизм келесі звенолардан тұрады:
0 - тірек;
1 - айналшақ;
2 - кулиса тасы;
3 - кулиса;
4 - кулиса тасы;
5 - тиек;
Демек, бұл механизм тіректен және бес қозғалмалы звенодан тұрады.
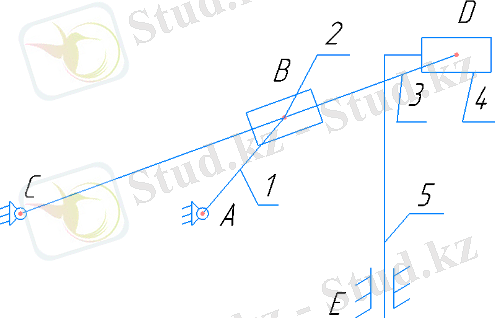
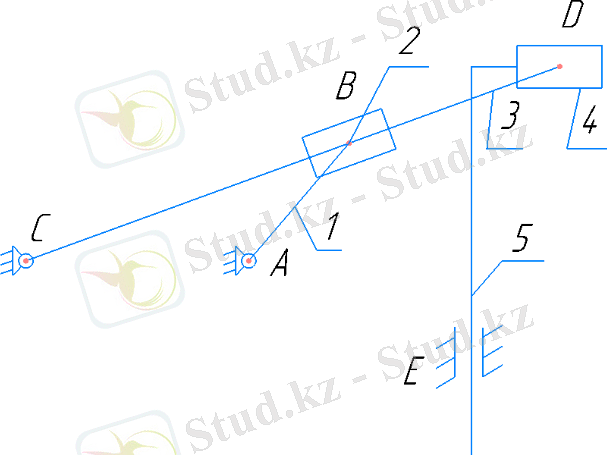
Келесі, механизмнің қандай кинематикалық жұптардан тұратындығын анықтау қажет.
1. А (0, 1) - V класты, айналмалы, жазық, ;
2. В (1, 2) - V класты, айналмалы, жазық, ;
3. В` (2, 3) - V класты, ілгерілемелі, жазық, ;
4. С (0, 3) - V класты, айналмалы, жазық, ;
5. D (3, 4) - V класты, айналмалы, жазық, ;
6. D` (4, 5) - V класты, ілгерілемелі, жазық, .
7. E(5, 0) - V класты, айналмалы, жазық, ;
Берілген рычагты механизм жазық механизм болып табылады себебі тек қана V класты жазық, төменгі кинематикалық жұптардан тұрады.
Жазық механизмнің еркіндік дәреже санын анықтау үшін Чебышев формуласы қолданылады :
(1)
мұндағы, n-қозғалмалы звенолар саны;
p 5 , p 4 - сәйкесінше V, IV класты кинематикалық жұптар саны.
Маған берілген механизм бірқозғалмалы болып табылады.
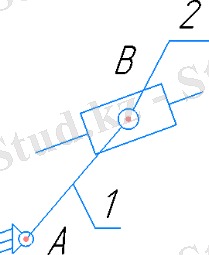
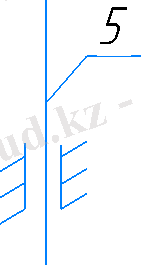
Механизмді құрылымдық топтарға жіктеу (сурет 2 - а, ә, б) :
а) ә) б)
а) I класты механизм; ә) II класты 3 түрлі Ассур тобы; б) II класты 2 түрлі Ассур тобы
Сурет 2 - Жетекші звено 1 болғандағы механизмнің құрылымдық топтары
Маған берілген механизм II класты себебімеханизмнің класы құрамындағы Ассур топтарының ең үлкен класымен анықталады.
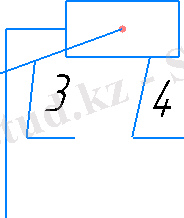
Механизмді құрылымдық топтарға жіктейміз (сурет 3. а, ә, б) :
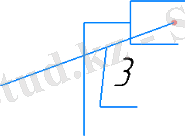
а) ә) б)
а) I класты механизм; ә) II класты 2 түрлі Ассур тобы; б) II класты 2 түрлі Ассур тобы.
Сурет 3 - Жетекші звено 3 болғандағы механизмнің құрылымдық топтары
Механизмнің құрылымдық формуласы:
Маған берілген механизм II класты себебімеханизмнің класы құрамындағы Ассур топтарының ең үлкен класымен анықталады.
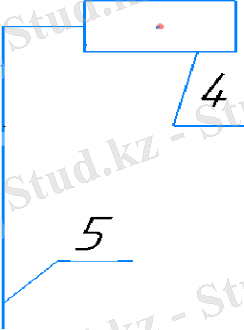
Механизмді құрылымдық топтарға жіктейміз (сурет 4. а, ә, б) :
а) ә) б)
а) I класты механизм; ә) II класты 1 түрлі Ассур тобы; б) II класты 2 түрлі Ассур тобы.
Сурет 4 - Жетекші звено 5 болғандағы механизмнің құрылымдық топтары
Механизмнің құрылымдық формуласы:
Маған берілген механизм II класты себебімеханизмнің класы құрамындағы Ассур топтарының ең үлкен класымен анықталады.
2 МЕХАНИЗМНІҢ КИНЕМАТИКАЛЫҚ АНАЛИЗІ
Механизмдер кинематикасы уақыт факторын есепке ала отырып, ал әсер етуші күштерді ескермей звенолармен олардың жеке нүктелерінің қозғалысын зерттейді.
Механизмді кинематикалық зерттеу деп, әдетте графиктік кескіндеумен есептеу нәтижесінде әрбір звеноның орналасу қаупін, звено нүктелерінің орын ауыстыруымен немесе звеноның бұрылу бұрыштарын, звенолар нүктелерінің сызықтық жылдамдықтарын және үдеулерін, звенолардың бұрыштық жылдамдықтары мен бұрыштық үдеулерін және механизмнің басқа да кинематикалық параметрлерін анықтайтын процесті айтады.
Механизмнің звено нүктелерінің жылдамдығын анықтау, атап айтқанда, машиналардағы жұмыс процесінің жағдайын анықтау үшін қажет. Жылдамдықты білген соң, үдеуді анықтауға болады, ал үдеуді білген соң олар арқылы инерция күші мен оның түсу нүктесін табуға болады. Шапшаң жүретін және ауыр звенолы машиналарда звенолардың қозғалысы біркелкі болмауына байланысты оларда инерция күші үлкен, сондықтан оларды беріктікке есептеу кезінде бұл күшті ескеру қажет.
Сөйтіп машина жұмысының сапасын анықтау немесе күш анализі үшін кинематикалық анализ жасау жұмысы жүргізіледі. Оның үстіне кинематикалық анализ машиналарына көшу үшін де бір басқыш болып табылады.
Механизмдердің кинематикалық анализі үшін графиктік, графаналитикалық және аналитикалық әдістер бар, бұл жоғарғы математика мен теориялық механиканың теориялары мен ұғымдарына сүйенеді.
Звено нүктелерінің координаталарының, жылдамдықтарын және үдеулерін есептеу механизм жұмысының толық циклінің арасындағы бірқатар орналасу қалыптары үшін жасалынады да, мұның өзі механизм нүктесінің траекториясы мен орын ауыстыру графигін құру жылдамдық пен үдеудің годографикасы дұрыс баға беру үшін қажетті параметрлерді анықтауға мүмкіндік туғызады.
2. 1 Механизмнің 12 орын үшін орындар планы
Белгілі бір масштабпен шартты белгілер бойынша жасалған механизмнің графиктік кескіш оның планы деп аталады [9, 13] .
Механизмдердің қатарындағы құрылымдық топтардың барлық звеноларының орындары жетекші звеноның орындарымен толық және бір мәнде анықталады. Сондықтан механизм планын құрғанда жетекші звенолардың орындарын жетекші звеноның берілген орындарына сәйкес құрады. Механизм планын құрғанда барлық звенолардың ұзындықтары және қозғалмайтын топсалардың центрлерінің координаталары және жетекші звеноның қозғалыс заңы берілген болуы керек.
А1 форматына орындар планын сызу үшін ең алдымен оның масштабын таңдап аламыз:
(2)
мұндағы - айналшақ ұзындығының нақты мәні, м ;
AB - айналшақ ұзындығының сызықтық мәні, мм.
Механизмнің звеноларының ұзындықтарымен тіреуіштерінің арақашықтығын анықтау үшін берілген арақашықтарды және ұзындықтарды масштабқа бөлеміз:
(3)
(4)
(5)
Жоғарыдағы формулалар бойынша звенолардың ұзындықтары мен тіреуіштерінің арақашықтықтарын анықтаймыз :
Енді осы анықталған сызбалық мәндер бойынша он екі орындар үшін механизмнің сұлбасын «қию» әдісімен саламыз.
2. 2 12 орын үшін жылдамдықтар планын құру
Жылдамдықтар планы векторлық әдіс пландар әдісімен құрылады. Жылдамдықтар планын құру үшін оның масштабын таңдап аламыз.
(6)
A және С нүктелерінің жылдамдығы:
(7)
(8)
мұндағы 1 звеноның бұрыштық жылдамдық, [с -1 ] ;
- 1 звеноның ұзындығының нақты мәні, .
Бұрыштық жылдамдықты келесі формуламен анықтаймыз:
(9)
- 1 звеноұзындығының айналу жиілігі
(10)
= = = 442
= ,
3 звено үшін В нүктесінің жылдамдығы:
= +
(11)
(12)
(13)
(14)
= (15)
Келесі формула бойынша бұрыштық жылдамдықтарды анықтаймыз:
ω 2 = ω 1 (16)
ω 3 = (17)
Есептеу нәтижелерін 1-ші кестеге енгіземіз.
Кесте 1 - Жылдамдықтар аналогтарының мәндері
(18)
5.
6.
7.
8.
9.
10.
11.
0.
1.
2.
3.
4.
(19)
5. 0. 52399
6. 0. 63231
7.
8.
... жалғасыСіз бұл жұмысты біздің қосымшамыз арқылы толығымен тегін көре аласыз.
- Іс жүргізу
- Автоматтандыру, Техника
- Алғашқы әскери дайындық
- Астрономия
- Ауыл шаруашылығы
- Банк ісі
- Бизнесті бағалау
- Биология
- Бухгалтерлік іс
- Валеология
- Ветеринария
- География
- Геология, Геофизика, Геодезия
- Дін
- Ет, сүт, шарап өнімдері
- Жалпы тарих
- Жер кадастрі, Жылжымайтын мүлік
- Журналистика
- Информатика
- Кеден ісі
- Маркетинг
- Математика, Геометрия
- Медицина
- Мемлекеттік басқару
- Менеджмент
- Мұнай, Газ
- Мұрағат ісі
- Мәдениеттану
- ОБЖ (Основы безопасности жизнедеятельности)
- Педагогика
- Полиграфия
- Психология
- Салық
- Саясаттану
- Сақтандыру
- Сертификаттау, стандарттау
- Социология, Демография
- Спорт
- Статистика
- Тілтану, Филология
- Тарихи тұлғалар
- Тау-кен ісі
- Транспорт
- Туризм
- Физика
- Философия
- Халықаралық қатынастар
- Химия
- Экология, Қоршаған ортаны қорғау
- Экономика
- Экономикалық география
- Электротехника
- Қазақстан тарихы
- Қаржы
- Құрылыс
- Құқық, Криминалистика
- Әдебиет
- Өнер, музыка
- Өнеркәсіп, Өндіріс
Қазақ тілінде жазылған рефераттар, курстық жұмыстар, дипломдық жұмыстар бойынша біздің қор #1 болып табылады.

Ақпарат
Қосымша
Email: info@stud.kz