Робот-манипуляторлар және автоматтандырылған манипулятор жүйесін жобалау

МАЗМҰНЫ
2. 1 Жүйенің жалпы құрылымы . . .
Қорытынды . . .
Пайдаланылған әдебиеттер тізімі . . .
Қосымша А . . .
Қосымша Б . . .
АНЫҚТАМАЛАР МЕН ҚЫСҚАРТУЛАР
РТК (робототехникалық кешендер) - бір немесе бірнеше роботтардан тұратын техникалық жүйелер.
ABS пластик - соққыға төзімділігі жоғары берік пластик.
LM2596 - қуатты төмендететін кернеу түрлендіргіші
Манипулятор - буындардан және ұстау құрылғыларынан тұратын жүйенің негізгі механикалық құрамдас бөлігі.
Басқару жүйесі - оператордан алынған командаларға сәйкес манипулятордың қозғалысын басқаратын электрондық жүйе.
Джойстик - оператор роботты басқару үшін пайдаланатын енгізу құрылғысы.
Микроконтроллер немесе микропроцессор - оператордан келетін командаларды өңдейтін және роботтың қозғалысын басқаратын негізгі компонент. Микроконтроллер әртүрлі тапсырмаларды орындау және әртүрлі сигналдар мен сенсорларға жауап беру үшін бағдарламаланады.
Жетекші механизмдер - манипулятордың немесе роботтың бөліктерінің қозғалысын басқару үшін қолданылады.
КІРІСПЕ
Робот-манипулятор - бұл адам қолмен басқара алатын және тәуелсіз құрылғы ретінде немесе күрделі роботтық кешеннің бөлігі ретінде пайдалануға болатын өнеркәсіптік құрылғы. Ол әр түрлі түйіндерден тұрады және олардың әрқайсысы айналмалы немесе трансляциялық қозғалыс сияқты белгілі бір функцияларды орындайды.
Қазіргі уақытта заманауи технологиялар адам қол еңбегін азайту мақсатында робот-манипуляторларды өндірістік орындарға енгізуде. Олар бірнеше ондаған кәсіпқойларды алмастыра отырып, әртүрлі тапсырмаларды орындай алады. Робот-манипуляторларды қолдану өнеркәсіптегі кез-келген процесті автоматтандыруға мүмкіндік береді, бұл өз кезегінде экономикалық тиімділік пен өндірісті оңтайландыру тұрғысынан маңызды. [obzor vidov]
Инженерлердің негізгі міндеттерінің бірі операцияларды тиімді орындаудың оңтайлы әдісін анықтау мақсатында бұрыннан бар және жаңа жұмыс процестерін талдау болып табылады. Осы тұрғыда қарастырылған робот-манипулятор джойстик арқылы басқарылады. Бұл манипулятордың негізгі функциясы әр түрлі өнеркәсіп түрлеріне арналған дайын өнімдері бар жылжымалы контейнерлерді немесе объектілерді бір орыннан екінші орынға қою болып табылады. [Design of a rob]
Өндірістік өнеркәсіптерде материалдармен және бұйымдармен жұмыс істеу - бұл материалдың белгілі бір мөлшерін белгілі бір жерге мүмкіндігінше қысқа мерзімде жедел тасымалдау үшін қолайлы пайдалану әдістерін қолдануды талап ететін қызмет. Сонымен қатар, ол белгілі бір заңдылықта бірге орындалуы керек, яғни дұрыс позицияға және ең аз шығынмен орналастырылуы керек. Осындай робот манипуляторлар жүйесі кедергілердің ең аз саны бар белгіленген жұмыс орындары арасында материалдарды тасымалдауға жауап береді және ол осы жұмыс орындары мен шеберханаларды өзара байланыстырады. Материалдарды өңдеу әсіресе, үлкен және ауыр заттарды сақтау және жылжыту кезінде процесі қауіпті болуы мүмкін. Манипуляциялық процестердің ең тиімді жүйесіне қол жеткізу өңдеу шығындарын азайту арқылы өнімнің бәсекеге қабілеттілігін едәуір жақсартады. Өнеркәсіптің әр саласында өнімді тасымалдауға және өңдеуге арналған құрылғылар мен машиналарды қадағалау мүмкіндігі бар. Негізінен, кез-келген өнім түрін өндірудің әр процесі көптеген кішігірім операцияларды қамтиды. Бұл операциялар тасымалдауға және өңдеуге арналған құрылғылардың көмегімен жүзеге асырылады, олардың арасында өнеркәсіптік роботтар да бар. Олар автоматтандыру процесінің ажырамас бөлігі болып табылады. [Design of a rob]
Автоматтандыру процесі салыстырмалы түрде қарапайым құрылғылармен жасалуы мүмкін қарапайым басқару операцияларынан бастап, ауқымды өндірістік жүйелерді басқарудың күрделілігіне дейінгі бірқатар әрекеттерді қамтиды. Басқару, өз кезегінде, басқару объектісіне қатысты ақпаратты бағалау және өңдеу процесі болып табылады. Бұл процесс деректерді жинауды, құрылғы параметрлерін өлшеуді, жабдықтың ағымдағы күйін талдауды және өзгерістер немесе штаттан тыс жағдайлар туралы дабылды қамтиды. Алынған ақпарат негізінде шешімдер қабылданады және процестер мақсатқа жету үшін реттеледі. Робот-манипуляторларды жобалау кезінде бұл принциптер шешуші рөл атқарады, өйткені олар қоршаған ортамен өзара әрекеттесуге, өзгеретін жағдайларға бейімделуге және жоғары тиімділік пен дәлдікпен әртүрлі тапсырмаларды орындауға мүмкіндік береді. [Design of a rob]
Қазіргі заманғы роботтар мен робототехникалық кешендер олардың барлық компоненттерін дамыту мен жетілдіруді қоса алғанда, үнемі жетілдіру процесінде. Бұл тек механика мен кинематиканы ғана емес, сонымен қатар басқару жүйелерін де, бағдарламалық жасақтаманы да қамтиды. Алайда, соңғы бірнеше онжылдықта роботтардың механикасы мен кинематикасындағы өзгерістер салыстырмалы түрде аз болды, ал басқару жүйелері мен бағдарламалық жасақтама революциялық өзгерістерге ұшырады. Микропроцессорлардың дамуы миниатюризацияда, шығындарды төмендетуде және роботтар үшін басқару жүйелерінің қолжетімділігін арттыруда шешуші рөл атқарды. Бұл жаңа басқару бағдарламаларының пайда болуына және қолданыстағы бағдарламаларды белсенді модернизациялауға әкелді. Микропроцессорлық негіздегі заманауи басқару жүйелері әртүрлі бағдарламалау тілдері мен енгізу / шығару стандарттарын қолдайтын әмбебап платформалар болып табылады. Осы дамумен әзірлеушілер өздерінің нақты міндеттеріне сәйкес келетін бағдарламалық өнімдер мен әзірлеу жүйелерінің кең ассортиментін таңдай алады. Бұл әзірлеу құралдары визуализация, қашықтан қол жеткізу, енгізу-шығару порттарымен жұмыс істеу, бейнекамералар мен аудио жүйелермен интеграциялау сияқты әртүрлі функционалдылыққа ие, бұл әзірлеушілерге роботты басқару бағдарламалық жасақтамасын жедел құруға және өзгертуге мүмкіндік береді. Дегенмен, әзірлеу құралдарының бай таңдауына қарамастан, басқару бағдарламаларын әзірлеу әдістемесі аз сипатталған және одан әрі зерттеу мен дамытуды қажет етеді. Бұл робототехника саласындағы өзекті міндет болып қала беретін оңтайлы даму ортасын таңдау, бағдарламаның тиімді құрылымын құру және жұмыс істеу алгоритмдерін әзірлеу мәселелерін қамтиды. [metodika]
Робототехника адам қызметінің әртүрлі салаларында шешуші рөл атқарады. Робот манипуляторлар монотонды, қауіпті немесе күрделі техникалық адам еңбегін ауыстыру үшін жасалады. Бұл құрылғыларды қолдану өндіріс кезінде жіберілетін қателер санын айтарлықтай азайтуға, өндірілетін ақаулардың санын, шикізаттың қажетсіз жоғалуын және қызметкерлер арасындағы жарақаттардың санын азайтуға мүмкіндік береді. Сондай-ақ робототехниканы қолдану кәсіпорындарда қолданылатын технологиялар тұрғысынан икемді етуге, жұмысшылардың еңбек жағдайын жақсартуға және цехтардағы қауіпсіздікті жаңа деңгейге көтеруге мүмкіндік береді. [ sciavicco robot]
1 РОБОТ МАНИПУЛЯТОРЛАР ЖӘНЕ ОЛАРДЫҢ ТҮРЛЕРІ
Робот манипулятор - адам қолмен басқара алатын өнеркәсіптік құрылғы болып саналады. Роботтық манипулятор - бұл алдын ала бағдарламаланған әрекеттерді орындайтын машина. Мұндай қондырғылар көбінесе «робот қолдар» деп аталады, өйткені олар адам қолының қозғалысына еліктейді. Қондырғылар көптеген операцияларды соның ішінде орау өндірісінен бастап, үлкен өлшемді құрылымдарды құрастыруға дейін орындай алады. Олар әртүрлі өндіріс салаларында кең ауқымда қолданылады. Мұндай құрылғы жеке бірлік ретінде ғана емес, сонымен қатар күрделі роботтық кешендерге де кіре алады. [State-of-the-art]
Алғашқы роботтық манипуляторлар қауіпті заттармен жұмыс істеу үшін жасалды. Олар радиоактивті материалдарды жылжытуға қызмет етті. Мұндай робот манипуляторлар алғаш рет 1940 - 1950 жылдары жасалды. Алдымен олар адамның өз күшімен басқарылды, содан кейін жетектері бар манипуляторлар жасалды. Компьютердің өнертабысы басқарудың жаңа мүмкіндіктеріне жол ашты, соның нәтижесінде робототехниканың пайда болуына әкелді. 1962 жылы АҚШ-та бірінші тәжірибелік робот «Versatran» жасалды. Кейінірек «Unimate1900» роботтары пайда болды, олар General Motors және Ford компанияларының зауыттарында қолданылды. 1967 жылы бұл роботтарды американдық лицензия бойынша өндіру Англия, Жапония және Швеция мемлекеттерінде басталды. [робот ман]
Материалды өңдеу құрылғысы заттарды тасымалдауға арналған бірінші патенттелген бағдарламаланатын құрылғы болды. Осы уақытқа дейін манипуляторлардың ең көп саны өнеркәсіптік кәсіпорындарда пайдалану үшін шығарылды. Әрбір робот-манипулятордың арнайы дизайны болуы мүмкін, бірақ барлық құрылғылар екі негізгі жүйеден тұрады: атқарушы және басқарушы жүйе. Орнатудың негізі оның денесі болып табылады, оған роботтың барлық элементтері орнатылып, бекітіледі. Жұмыс құралы немесе ұстағыш құрылғы - бұл қажетті объектіге тікелей әсер ететін жұмыс органы. Әрбір өндірісте мақсатқа байланысты роботтың жұмыс бөлігі әртүрлі болады. Жұмыс органы оның қозғалыс механизміне қосылған, ол құралды берілген нүктеге жылжытады. Жұмыс органының қозғалысын бақылау және үйлестіру басқару жүйесі арқылы жүзеге асырылады. Құрылымның жұмысы энергияны манипулятордың механикалық қозғалыстарына түрлендіретін жетекпен қамтамасыз етіледі. Басқару құрылғысына қашықтан басқару пульті, сақтау және есептеу құрылғылары, жетектерді басқару блоктары және басқа да технологиялық жабдықтар кіреді. [6]
1. 1 - сурет. Робот-манипулятордың жалпы көрінісі[] .
Робот конструкцияда жылжымалы блоктардың болуына байланысты айналмалы және трансляциялық қозғалыстарды жүзеге асыра алады. Өндіріске манипуляторларды енгізу процесін бәсеңдететін факторлардың бірі - робот бөлшектерінің мерзімінен бұрын тозуы. Бөлшектерді өндіру сатысында қызмет ету мерзімін ұлғайту және қымбат құрылғыларға қызмет көрсетуді жеңілдету үшін әзірлеушілер ұзақ мерзімді құрғақ майлау технологиясын жүзеге асыратын инновациялық майлау материалдарын пайдаланады.
Робот-манипулятордың буын түрлері мен саны оның еркіндік дәрежесін, жұмыс аймағының пішінін және оны қалай пайдалануға болатынын анықтайды. Бұл өз кезегінде роботтың қалай жіктелетінін анықтайды[1] . Ондағы декарттық робот - манипуляторлары бір - біріне перпендикуляр және тек сызықтық сырғанау қозғалыстарын қамтамасыз ететін 3 призмалық қосылыстардың көмегімен байланысады. Нәтижесінде декарттық робот 3 осьті робот ретінде жіктеледі және геометриялық жұмыс аймағына ие. Полярлық роботта оның қолы мен денесі айналмалы қосылыс арқылы байланысады. Байланыстың бұл түрі полярлық робот қолының полярлық геометрия жүйесінде 3 ось ішінде еркін қозғалуына мүмкіндік беретін айналмалы қозғалыстарды қамтамасыз етеді. Ал цилиндрлік робот - айналмалы қосылыс пен тік ось бойымен қозғалуға мүмкіндік беретін сызықтық қосылыс арқылы жұмыс істейді. Бұл қосылыстарды орнату қолды ұзартуға немесе артқа тартуға мүмкіндік береді, бірақ оның жұмыс ауқымы кішкентай цилиндрлік пішінінен әлдеқайда кіші болып табылады[] . Scara роботына келетін болсақ ол x және y осьтері бойымен қозғалуға мүмкіндік беретін айналмалы қосылыстары бар робот, онда буындар z осінде бір-бірімен тығыз орналасады. Олар үлкен жартылай шеңберлі жұмыс кеңістігіне ие болатындай етіп жасалған, өйткені олардың буындары бір деңгейлі жазықтықта орналасқан [] . Артикуляциялық робот - буынды робот кез келген роботтың ең икемді қолдарына ие. Бұл робот - манипулятордың қолы робот корпусына айналмалы буын арқылы, ал шынтақ пен қолдың басқа бөліктері қозғалмалы буындар арқылы жалғанады. Айналмалы буындар қолды айналдыруға, еңкейтуге және иілуге мүмкіндік береді, осылайша робот манипулятор 6 осьті бағытта жұмыс жасайды[] .
Робот манипулятор - бұл әр түрлі түйіндерден тұратын күрделі құрылғы, олардың әрқайсысы нақты тапсырмаларды орындауға жауап береді. Кейбір түйіндер айналмалы қозғалысты қамтамасыз етеді, бұл робот манипуляторға объектілерді кеңістікте бұруға немесе бағыттауға мүмкіндік береді. Басқа түйіндер трансляциялық қозғалысқа жауап береді, бұл манипуляторға объектілерді берілген траектория бойымен немесе белгілі бір арақашықтыққа жылжытуға мүмкіндік береді. Мұндай ұйым манипуляторға қажеттіліктер мен қажетті операцияларға байланысты әртүрлі тапсырмаларды тиімді орындауға мүмкіндік береді[] .
Манипулятор құрылымының формуласы оның құрылымдық схемасының математикалық көрінісі болып табылады.
Робот манипулятордың қозғалыс сипаттамасы 3 санатқа бөлінеді: ғаламдық, аймақтық және жергілікті.
Ғаламдық (жылжымалы негізі бар роботтар үшін) - механизмнің өлшемдерінен асатын манипулятор стендінің қозғалыстары. Мұндай қозғалыстар әдетте роботты ұзақ қашықтыққа жылжыту үшін және үлкен кеңістікті қамту үшін қажет[] .
Аймақтық (көлік) қозғалыстар - робот манипулятордың алғашқы үш буынымен немесе оның «қолымен» қамтамасыз етілген қозғалыстар. Мұндай қозғалыстардың шамасы робот механизмінің өлшеміне сәйкес келеді. Бұл қозғалыстың түрі осы аймақтағы жақын қашықтықта объектілерді ұстау және жылжыту сияқты, робот манипулятордың жұмыс аймағындағы тапсырмаларды орындау үшін қолданылады[] .
Жергілікті (бағдарлау) қозғалыстар - роботтың «білегін» құрайтын манипулятордың буындарымен қамтамасыз етілген, оның өлшемі механизмнің өлшемінен айтарлықтай аз. Бұл қозғалыстар түсіру немесе манипулятор құралын дәл орналастыру және бағдарлау үшін қолданылады. Оған құрастыру операцияларын орындау немесе объектілерді дәл манипуляциялау жатады[] .
Қозғалыстардың жіктелуіне сәйкес манипуляторда әртүрлі қызметтері бар кинематикалық тізбектің екі бөлімін ажыратуға болады. 1. 2 - суретте [] «қол» деп, ұстағыштың ортасының қозғалысын қамтамасыз ететін манипулятордың бөлігі түсіндіріледі. Ол М нүктесі (ұстағыштың аймақтық қозғалыстары) болып көрсетілген [7] . Ал «білек» ұстағыштың бағдарын қамтамасыз ететін буындар мен жұптар. Ол ұстағыштың жергілікті қозғалысына жатады. Антропоморфтық манипулятордың құрылымдық сұлбасын, яғни бірінші жуықтау бойынша адам қолының механизміне сәйкес келетін суретті қарастырайық (1. 2 - сурет) [] . Антропоморфтық манипулятор адам қолының негізгі бөліктеріне ұқсайтын бірнеше бөліктерден тұрады: иық, білек және қол. Бұл бөлшектердің әрқайсысы әртүрлі тапсырмаларды орындау үшін қажетті еркіндік дәрежесін қамтамасыз ететін жылжымалы буындар мен жұптар арқылы біріктірілген.
Бұл механизм үш қозғалмалы буыннан және үш кинематикалық жұптан тұрады: екі үш жылжымалы сфералық A3сф және C3сф және бір жылжымалы айналмалы B1а.
Манипулятордың жұмыс кеңістігі - оның буындарының көптеген мүмкін позицияларын қамтитын беттермен шектелген кеңістік бөлігі.
Манипулятордың қызмет көрсету аймағы манипулятордың ұстау орталығының көптеген мүмкін позицияларына сәйкес кеңістіктің бөлігі болып табылады. Қызмет көрсету аймағы манипулятордың маңызды сипаттамасы болып табылады. Ол манипулятор қолының құрылымы мен координаттар жүйесімен, сондай - ақ беріліс қорабындағы буындардың салыстырмалы қозғалысына қойылған дизайн шектеулерімен анықталады [] .
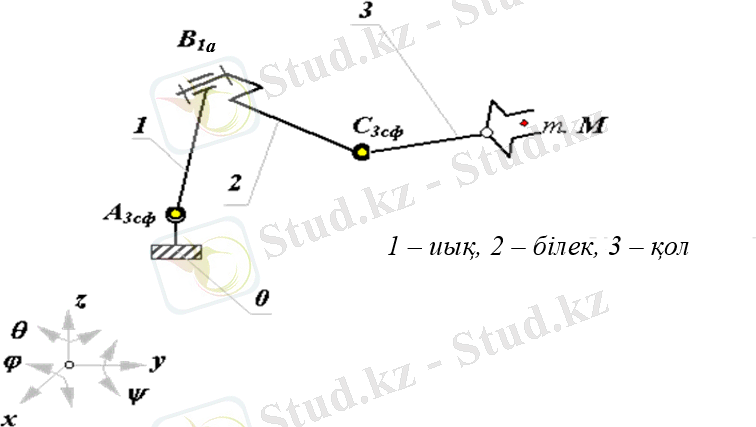
1. 2 - сурет. Антропоморфтық манипулятордың құрылымдық сұлбасы[] .
Берілген бағдармен кеңістікте объектінің қажетті қозғалысын қамтамасыз ету үшін манипулятордың кинематикалық тізбегінің құрылымы манипулятордың ұстағышына кемінде алты координатта қозғалыстарды орындауға мүмкіндік беруі керек: үш сызықтық және үш бұрыштық. Ұстағыштың центрімен сәйкес келетін манипуляция объектісінде М нүктесін қарастырайық: 0x0y0z0 қозғалмайтын (негізгі) координаталар жүйесіндегі объектінің орны М нүктесінің радиус векторымен және осы нүктеден шығатын бірлік векторының бағдарымен анықталады. Математикада нүктенің кеңістіктегі орны үш координат жүйесінің бірінде анықтауға болады: x M, y M, z M координаталары бар тікбұрышты декарттық, r sM, ϕ M , z M координаталары бар цилиндрлік және координаталары r M, ϕ M , θ M болатын сфералық [7] .
Нысанның кеңістіктегі бағыты негізгі координаталар жүйесінің осьтеріне қатысты бағдарлау векторын құрайтын α, β және γ бұрыштары арқылы анықталады. 1. 3 - суретте [] айналмалы кинематикалық жұптары бар алты осьті манипулятордың схемасы, манипуляцияланатын объектінің орналасуы көрсетілген.
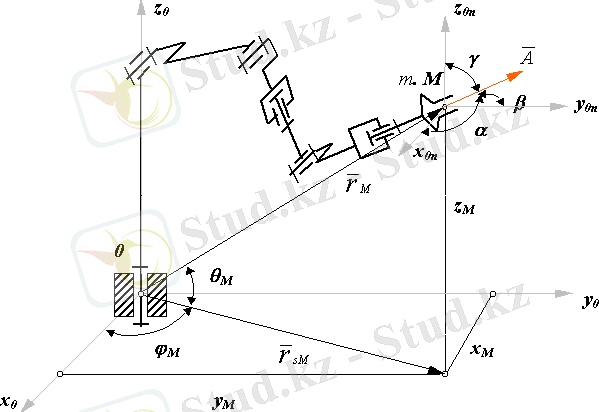
1. 3 - cypeт. Алты жылжымалы манипулятордың схемасы[] .
Манипулятор механизмін құрылымдық синтездеу кезінде әртүрлі маңызды бөліктерді ескеру қажет. Мысалы, кинематикалық жұптар, әдетте қозғалтқыштар сияқты жетектермен, сондай - ақ олардағы тежегіштермен құрастырылады. Демек, роботты жобалауда көбінесе бір қозғалмалы кинематикалық жұптар қолданылады; мысалы, айналмалы немесе аударма түрлері.
Манипуляторлардың кинематикалық жұптары жетектермен, соның ішінде қозғалтқыштармен және тежеу құрылғыларымен жабдықталған. Сол себептен манипуляторлардың тізбектерінде әдетте қозғалатын кинематикалық жұптар, яғни айналмалы немесе трансляциялық жұптар қолданылады [] .
Манипулятор үшін белгіленген ұтқырлықты ғана емес, сонымен қатар кинематикалық осьтер жұптарының жұмыс аймағының пішінін бағдарламаланған қозғалыстардың қарапайымдылығы мен ыңғайлылығын сақтау үшін осындай бағдарлауды қамтамасыз ету маңызды.
Кинематикалық жұптардың бағдарын таңдаған кезде жетектердің орналасуын ескеру маңызды - негізде немесе қозғалатын буындарда. Сондай-ақ манипулятордың тұрақтылығы мен тиімділігін қамтамасыз ету үшін буындардың салмағының күштерін теңестіру жолдарын қарастыру қажет [] .
Ұстағыштың кеңістіктегі қозғалысын координаталық жүйелердің бірінің осьтері бойымен алғашқы үш кинематикалық жұп осьтерін бағдарлау арқылы қамтамасыз етуге болады. Бұл манипулятор қолының түрін және оның қызмет көрсету аймағының түрін анықтау үшін маңызды. Негізгі координат жүйелерін және олардың манипулятор иінінің түріне және оның қызмет ету аймағына әсерін қарастырайық.
Декарттық координаталар жүйесі бойынша бағытталған осьтері бар манипуляторлар, әдетте, сызықты немесе цилиндрлік құрылымға ие болады. Мұндай манипуляторлардың жұмыс жасау аймағы тікбұрышты немесе цилиндрлік болады, бұл өз кезегінде кеңістіктегі қозғалыстарды түзу сызықтар мен бұрыштармен бағдарламалауды жеңілдетеді.
Цилиндрлік құрылымның манипуляторларында осьтердің бірі, көп жағдайда z осі тұрақты болып қалады, ал қалған екеуі (радиалды және бұрыштық) айналмалы және трансляциялық қозғалады. Ал қызмет көрсету аймағы цилиндр тәрізді, яғни бекітілген осьтің айналасында айналуды және сол ось бойымен қозғалуды қажет ететін тапсырмаларды орындайды.
Сфералық құрылымды манипуляторлар екі осьті болып келеді. Бірі айналмалы ось, ал екіншісі бұрыштық қозғалысты қамтамасыз етеді. Бұл манипуляторлардың қызметі, сфераның ортасындағы көлемдік кеңістіктегі объектілерді басқаруға мүмкіндік береді.
Полярлық манипуляторлар көбінесе айналуды және бекітілген ось бойынша сызықтық қозғалысты қажет ететін есептерде қолданылады. Олар айналмалы және сызықтық қозғалыстарды орындайды.
Манипулятордың құрылымы жетектердің орналасуымен де анықталады. Егер жетектер тікелей кинематикалық жұптарға орналастырылса, онда жетектердің массалары манипулятордың қозғалатын буындарының массасына қосылады [11] . Жетектерге түсетін жалпы жүктеме және олардың қуаты артады, ал манипулятор массасының пайдалы жүктемеге қатынасы (манипуляцияланатын объектінің максималды массасы) төмендейді. Сондықтан, роботтарды жобалау кезінде, ең қуатты және ең үлкен массаға ие - тұтқа буындарының жетектері, олар роботтың негізіне жақынырақ орналастырылады. Қозғалысты жетектен бөлшекке беру (1. 4 - сурет) [] үшін қосымша кинематикалық тізбектер қолданылады [] .
Екінші бөлшекті жүргізу үшін - төртінші, бесінші және екінші бөлшектерден құралған қарапайым рокер механизмі;
Үшінші бөлшекті жүргізу үшін - рокер механизмінен және төрт жолақты топсадан тұратын тізбек.
Осылайша, рычагты механизмде иіннің кинематикалық тізбегін (1, 2 және 3 буындары) және жетектердің кинематикалық тізбектерін ажыратуға болады. Жетектерді негізге орналастыру принципін қолданатын манипуляторлар күрделі механизмдерге ие. Бірақ буындар мен кинематикалық жұптардың санының артуы манипулятордың қозғалатын буындарының массалары мен инерция моменттерінің азаюымен өтеледі. Сонымен қатар, жабық кинематикалық тізбектер механизмнің дәлдігі мен қаттылығын арттырады. Жалпы алғанда, біріктірілген жетекті орналастыру принциптерін қолданатын манипуляторлар (кейбір жетектер базада, кейбіреулері қозғалатын буындарда) жақсырақ энергетикалық және динамикалық сипаттамаларға ие және сонымен қатар жоғары дәлдікке ие.
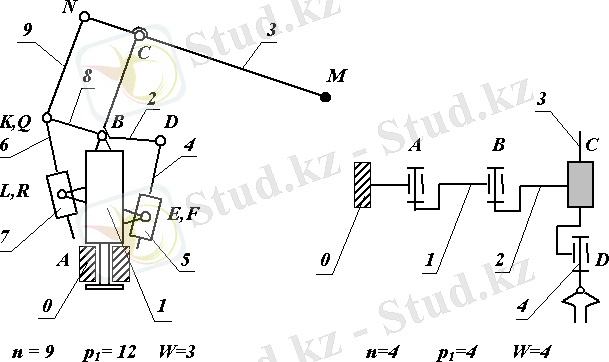
1. 4 - сурет . Қозғалысты жетектен беру [] .
Роботтың жұмыс бағдарламасына сәйкес тежеу құрылғылары кейбір кинематикалық жұптарда іске қосылады. Бұл тапсырмалардың дұрыс орындалуын қамтамасыз ететін қозғалыстарды дәл бақылау және робот бөліктерін қажетті сәтте тоқтату үшін қажет. Бұл жағдайда механизмнің екі бөлшегі бір-бірімен қатаң байланысып, бір буынды құрайды. Механизмнің құрылымдық схемасынан бір кинематикалық жұп және бір буын алынып тасталады, ал механизмнің ұстағышының қозғалыс саны азаяды. Механизмнің құрылымы жұмыс операцияларын орындау процесінде (мысалы, құрастыру немесе дәнекерлеу кезінде) манипуляция объектісі бар қысқыш қоршаған заттармен жанасып, олармен кинематикалық жұптарды құрайтын жағдайларда өзгереді. Механизмнің кинематикалық тізбегі жабылады, ал қозғалыс саны азаяды. Бұл жағдайда тізбекте артық қосылымдар пайда болуы мүмкін. Өнеркәсіптік роботтың жұмысын бағдарламалау кезінде манипуляторлардың бұл құрылымдық ерекшеліктерін ескеру қажет [] .
Манипулятор механикасының негізгі міндеттеріне: жетектерді синтездеу және талдау әдістерін әзірлеу; манипулятордың қозғалысын бағдарламалау; беріліс қорабындағы басқару күштері мен реакцияларды есептеу; теңгеруші манипулятор механизмдері жатады [] .
... жалғасыСіз бұл жұмысты біздің қосымшамыз арқылы толығымен тегін көре аласыз.
- Іс жүргізу
- Автоматтандыру, Техника
- Алғашқы әскери дайындық
- Астрономия
- Ауыл шаруашылығы
- Банк ісі
- Бизнесті бағалау
- Биология
- Бухгалтерлік іс
- Валеология
- Ветеринария
- География
- Геология, Геофизика, Геодезия
- Дін
- Ет, сүт, шарап өнімдері
- Жалпы тарих
- Жер кадастрі, Жылжымайтын мүлік
- Журналистика
- Информатика
- Кеден ісі
- Маркетинг
- Математика, Геометрия
- Медицина
- Мемлекеттік басқару
- Менеджмент
- Мұнай, Газ
- Мұрағат ісі
- Мәдениеттану
- ОБЖ (Основы безопасности жизнедеятельности)
- Педагогика
- Полиграфия
- Психология
- Салық
- Саясаттану
- Сақтандыру
- Сертификаттау, стандарттау
- Социология, Демография
- Спорт
- Статистика
- Тілтану, Филология
- Тарихи тұлғалар
- Тау-кен ісі
- Транспорт
- Туризм
- Физика
- Философия
- Халықаралық қатынастар
- Химия
- Экология, Қоршаған ортаны қорғау
- Экономика
- Экономикалық география
- Электротехника
- Қазақстан тарихы
- Қаржы
- Құрылыс
- Құқық, Криминалистика
- Әдебиет
- Өнер, музыка
- Өнеркәсіп, Өндіріс
Қазақ тілінде жазылған рефераттар, курстық жұмыстар, дипломдық жұмыстар бойынша біздің қор #1 болып табылады.

Ақпарат
Қосымша
Email: info@stud.kz