Тұрақты ток қозғалтқышының автоматты реттеу жүйесінің тұрақтылық талдауы және параметрлік тиімделуі VisSim моделінде

Жұмыс түрі: Курстық жұмыс
Тегін: Антиплагиат
Көлемі: 24 бет
Таңдаулыға:
Мазмұны:
Кіріспе
- Тапсырма және бастапқы берілгендер
- Жұмысты орындау тәртібіБастапқы берілгендердің анализіАРЖ жұмыс істеу принціпін сипаттауАРЖ-нің құрылымдық және аналитикалық модельдерін құруБайланыспаған контурдың тұрақтылығын зерттеуБайланыспаған контурдың АРЖ-нің тұрақтылығын бағалауБайланысқан АРЖ-нің коррекциясы (түзетілуі) АРЖ сапасын бағалауАРЖ тұрақтылық обылысын анықтау
- Элеметтердің параметрлері мен беріліс функциялары
3. 1. Тұрақтылықты бағалау және байланысқан АРЖ тұрақтандырылуы
3. 1. 1. АРЖ құрылымдық сұлбасын құру
3. 1. 2. Модельді алғашқы рет іске қосу
3. 2. АРЖ-нің параметрлік тиімделуі
3. 2. 1. Байланыспаған АРЖ-нің тұрақтандырылуы
3. 2. 2. Байланысқан «Волна - В-0» АРЖ-нің алдын - ала түзету
3. 3. АРЖ-нің құрылымдылық - параметрлік тиімделуі
3. 3. 1. ПИ - реттегіштің баптайтын параметрлерін анықтау
3. 3. 2. Басқару контуріне ПИ - реттегішін енгізу
3. 3. 3. ПИ - реттегіштің баптайтын параметрлерін анықтап алу
3. 4. «Волна В-0» АРЖ-нің сапасын бағалау
3. 4. 1. Өтпелі режим сапасының көрсеткіштері
3. 4. 2. Орнатылған режимнің сапа көрсеткіштері
Қорытынды
Қолданылған әдебиеттер
Кіріспе
Реттеу жүйесінің тұрақтылығы деп - оны қалыпты жағдайдан шығарған сыртқы күштер әсері жойылғаннан кейін, қалпына қайта орала алу мүмкіндігін айтады. Бірақ дұрыс жобаланып жасалған жүйе барлық сыртқы қарсылықтарды бұзып, тұрақты жұмыс істеуі қажет.
Осыған байланысты суретте көрсетілген автоматты реттеу жүйесінің құрылымдық сұлбасын тұрақтылыққа зерттеп, оның тұрақтылығын бағалап, дәлдігін көтеру үшін VisSim программалау ортасында әртүрлі сәйкес модельдері алынды.
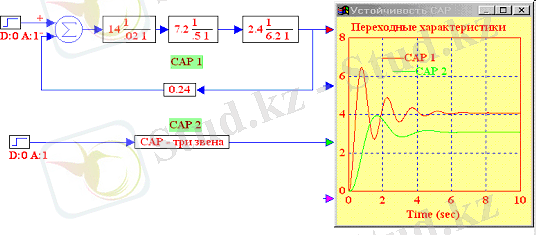
1 - сурет
Тұрақтылық ұғымы жүйенің құрылымымен тығыз байланысты болғандықтан модельдерді алу үшін сипаттамалық (дифференциалдық) теңдеулер алу қажет болады. Сипаттамалық теңдеудің бірінші бөлігінде әрқашан қозғаушы күштер көздерінің мәндері болады. Дәл осы сипаттамалық теңдеулердің көмегімен жүйенің тұрақтылығына анализ жүргізе аламыз.
Тұрақтылық критерийлері алгебралық және жиіліктік болып бөлінеді. VisSim программасында көрсетілген жүйе тұрақтылығы жиіліктік критерийлер бойынша модельденді.
1. Тапсырма және бастапқы берілгендер.
Курстық жұмыстың тақырыбы: Тұрақты тоқтың двигатель валының айналу жилігінің автоматты реттеу жүйесінің (АРЖ) анализімен тиімделуі.

Сур 1. АРЖ-нің (ЧВДПТ «Волна Вар - NN») функционалды сұлбасы.
У - күшейткіш; ТП - тиристорлы түрлендіргіш; Г - генератор; ДПТ - тұрақты тоқ двигателі; ТГ - тахогенератор; ОСН - кернеу бойынша иілмелі кері байланыс. ДПТ - басқару нысаны, оның шығыстық шамасы, вал айналысының U3 - тапсырма кернеуі, осы шамамен сәйкес ДПТ вал айналысының жиілігі - n өзгеру керек Мс - сырттан (осы шамаға) әсер ететін күш моменті, қозғалысқа келтіретін машинаның ДПТ валына келтірілген.
Элеметтердің параметрлері:
У - күшейткіш беріліс функциясы бар апериодтық буынмен модельденеді:

параметрлері: k y = (20+N) ; T y = (0. 06 + 0. 001N), с.
ТП - тирсторлы түрлендіргіш беріліс функциясы бар апериодтық буынмен модельденеді:

параметрлері: k тп = (15+2N) ; T тп = (0. 05 + 0. 001N), с.
ОСН - керену бойынша болатын иілмелі кері байланыс, инерциялы-дифференциалды буын:

мұндағы: k осн = 0. 1(1. 5 + 0. 1N) ; T осн = 0. 01(5 + N), c.
ТГ - тахогенератор, күшейтпелі (пропоционалды) буын:

мұндағы: k тг = 0. 01(2 + 0. 3N), [В•сек/айн] .
Г - генератор, апериодты буын:

мұндағы: k г = 0. 1(13 + 0. 1N) ; T г = 0. 01 (8 + N), с.
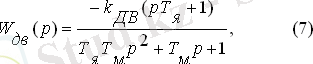
ДПТ - тұрақты тоқ двигателі, тербелістік буын. Оның беріліс функциясы басқару каналы бойынша табылады:

ал сырттан әсер ету каналы бойынша:
- kду=0. 1(12+N) =2, [айн/(сек*В) ] ;
- kдв=0, 05(15+N) =1. 15, [айн/сек*Н*м] ;
- Тя=0. 01(6+0. 32*N) =0. 0856, c;
- TM=0. 1(5+0. 5*N) =0. 9, c.
Тиристорлы түрлендіргіштің сызықты емес екенін ескере отырып, АРЖ-ні зерттейміз: күшейтілуі шектеулі. ТП кірісіне келтірілген шектеу деңгейі 0, 2(1+0, 1N) - ді құрайды.
2. 1. Бастапқы берілгендердің анализі
Бастапқы берілгендердің анализі модельдерді іске асыру мақсатында бастапқы берілгендердің жеткіліктігін анықтау үшін жасалады.
2. 2. АРЖ жұмыс істеу принціпін сипаттау
АРЖ-нің жұмыс істеу принціпі функционалдық сұлба бойынша сипатталады. Сипатталуы 2 бөлімнен тұрады. Біріншісінде статикадағы АРЖ-нің жұмысы қарастырылады. АРЖ бақылауды қамтамасыз етеді, бұған дәлел: ДПТ валының айналыс жилігінің тұрақты берілетін және сырттан әсер етулердегі берілетін шамаға сәйкестігі (пропоционалдығы) .
Екінші бөлімшесіндегі бақылау динамикада да қамтамсыз етілетіндігі жөнінде баяндалады: тапсырма мен сырттан әсер ету өзгергенде АРЖ-сі валдың айналыс жилігінің мәнін қолдауға тырысады, мән тапсырмаға сәйкес болады. АРЖ-ні қолдану тапсырыстың аз қуатты сигналдары арқылы басқарудың тез әрекет етуін және айналыс жилігінің қолдау дәлдігін арттыруға мүмкіндік береді.
2. 3. АРЖ-нің құрылымдық және аналитикалық модельдерін құру
Модельдеуді VisSim программалық пакеті қолданумен іске асырамыз. Модельдеу арқылы анализдеу мүмкіндігі қамтамасыз етіледі, оның нәтижелерімен АРЖ-нің тиімделуі іске асырылады.
2. 3. 1. АРЖ құрылымдық сұлбасының құрылуы
VisSim кеңістігіне функционалдық сұлбаға сәйкес блоктар шығарылады. Двигатель үш буынмен модельденеді. Тұрақтылыққа анализдеу кезінде двигательді Wy(p) - беріліс функциясы бар бір буынмен көрсету жеткілікті, өйткені контурдан тыс буындар жүйе тұрақтылығын әсер етпейді.
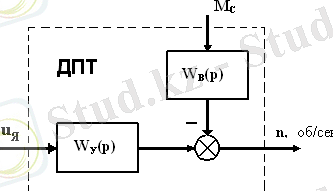
Сур. 2. Тәуелсіз қозуы бар тұрақты тоқ двигателінің құрылымдық сұлбасы (моделі), Uя - двигатель зәкірінің кернеуі, Мс - валдағы кедергі моменті, n - вал айналысының жиілігі.
АРЖ байланыспаған контурын құрамыз. Кірісіне қадамды кернеу беріледі. Кері байланыс күшейткішінің шығысы осциллографқа қосылады.
2. 3. 2. АРЖ элементтерінің беріліс функцияларын анықтау
Элементтердің беріліс функциялар параметрлерінің мәндері нұсқа номеріне сәйкес анықталады. Бұл мәннен одан сәйкес блоктарға енгізіледі. Диаграммаладың блоктары рационалды түрде орналастырылады, жазбалар мен комментарилерге орын қалдыру алдын - ала ойластыру керек. Жұмысты орындаған студенттің аты - жөні орындалған уақыты көрсетілуі керек.
2. 4. Байланыспаған контурдың тұрақтылығын зерттеу
АРЖ-нiң байланыспаған контуры тұрақты элементтерден тұрады, бiрақ өз алдына жеткiлiктi керi байланысының контурын құрайды. Сондықтан да, АРЖ-ның байланыспаған күйде тұрақсыз бола алады.
Байланыспаған АРЖ-нiң тұрақтылығының бағалануы Найквист критерийiнiң практикалық қолдануының қажеттi шартының орындалуын тексеру мақсатында жүргiзiледi: байланыспаған контур тұрақты болуы керек. Найквист критерийi байланысқан АРЖ-нiң тұрақтылығын бағалау үшiн ғана емес, оның құрылымды - параметрлiк тиiмделуi үшiн қолданылады.
Программаны есепке қосу арқылы өтпелi сипаттамның түрiне қарай байланыспаған контурдың тұрақты ма, жоқ па екендiгiн анықтаймыз.
2. 5. Байланыспаған контурдың тұрақтандырылуы
Күшейткiштiң күшейту коэффицентiн өзгерту жолымен жергiлiктi керi байланыс контурының элементтер параметрлерiн өзгерте отырып, өтпелi процестiң 5÷20% шамасында қайта реттелуі бар апериодты түрге айналуын іске асыру керек. Бұл есепті шешудің мүмкін болатын тәсілі: байланыспаған контурді тұрақтылық шегіне шығару, содан соң күшейткіштің күшейту коэффицентін 2÷10 есе азайту.
2. 6. Байланысқан АРЖ-нің тұрақтылығын бағалау
Бұл Найквист критерийінің логарифмдік нұсқасымен іске асырылады.
Байланыспаған контурдың элементтерін белгілеп, ЛАЖС мен ЛФЖС-ні шығарамыз. Графиктерді көрнекі түрде орналастыру керек. Фаза мен амплитуда бойынша қорларды анықтаймыз. Олардың мәндері мүмкін бола алатын мәндермен салыстырамыз.
2. 7. Байланысқан АРЖ-нің коррекциясы (түзетілуі)
Коррекция басқару контурінің күшейту коэффицентін тиімдеу арқылы жүзеге асырылады. Егер бұл жеткіліксіз болса, негізгі контурге ПИ-реттегіші енгізіледі.
Байланыспаған контурдің ЛАЖС мен ЛФЖС арқылы күшейту коэффицентінің өзгерісінің қажетті шамасын анықтаймыз, өлшем бірлігі - Дб, бұл тұрақтылық қорлары талап етілетін интервалдарға (жоғарғы шекке жақын болғаны қолайлы) кіру үшін орындалады. Фаза бойынша бұл 35°÷65° және амплитуда бойынша 6÷12÷20Дб құрайды. Контур күшейтілуінің өзгерісін П - реттегішін (күшейткіштің) енгізу арқылы жүргізу керек, бұны басқару контурының негізгі сумматорын енгізгеннен кейін жүргізіледі. Бұл кезде контур күшейтілуінің шамасы 20Дб-ден кем болса, негізгі кері байланыс контуріне П - реттегішінен кейін бірден беріліс функциясы бар ПИ - реттегішін енгізу керек:

- kp - ПИ - реттегішінің күшейту коэффиценті;
- Ти - интегратор уақытының тұрақтысы, 0 Дб/дек және 20 Дб/дек көлбеуі бар ЛАЖС учаскелерінің аппроксимация жиілігіне кері пропорционал.
Сұлбада блоктар санын азайту үшін ПИ - реттегішінде П - реттегіштің күшейтілуін ескеруге болады. Күшейтуді түзеткеннен (коррекциясын жүргізгеннен) кейін, не болмаса ПИ - реттегішті енгізгеннен кейін контур элементтерін қайта белгілеп, ЛАЖС мен ЛФЖС құрамыз, және де фаза мен амплитуда бойынша болатын қорлардың талаптарға сәйкестігін тексереміз. Астатикалық жүйедегі контур күшейтілуінің коэффиценті тура регламенттеледі, ол жанама түрде жүйенің тез әрекет етуін сипаттайды.
2. 8. АРЖ сапасын бағалау
АРЖ өтпелі рижімінің сапасын бағалау байланысқан АРЖ-нің өтпелі функциясы арқылы жүзеге асырылады.
Басқарудың негізгі контурын байланыстырамыз, осциллографты АРЖ шығысына ауыстырып қосамыз, ДПТ шығысына әкелеміз.
Есептеуді жүргіземіз.
Реттеу уақытын блағалаймыз, яғни қайта реттелу жүреді. Жақсы ойластырылған жүйенің қайта реттелуі 0% ÷ 40% шектер аралығында болады. Егер алынған қайта реттелу 40% шамасынан асса, жүйенің түзетілуіне қайта оралу және контур күшейтілуін азайту керек.
Толықтай түзетілген жүйенің байланыспаған контурдың ЛАЖС бойынша с0, с1 және с2 - қателік коэффицентерін шамалы түрде анықтау қажет.
2. 9. АРЖ тұрақтылық обылысын анықтау
Бұл контурдың күшейтілу коэффиценті бойынша жүретін D - ажырату әдісімен іске асырылады. Бұған Vissim-дегі Найквист годографының құрушысы «бейімделуі» мүмкін. Ол үшін байланысқан АРЖ сипаттамалық теңдеуінен бөлшекті - рационалды функция түрінде күшейту коэффицентін шығарып алу керек. Vissimде сызықтық буынның алымы дәрежесі бөлімі дәрежесінен аспайтындықтан, бұндай жағдай үшін 1/k инверсті мәнгі арналған тұрақтылық обылысы құрылу керек.
3. Элеметтердің параметрлері мен беріліс функциялары
У - күшейткіш апериодтық буынмен модельденеді, параметрлері:
ky=(20+8) =28; Ty=(0. 06+0. 001*8) =0. 068, c.
Күшейткіштің беріліс функциясы:
Wy(p) =28/(0, 068р+1)
ТП - тиристорлы түрлендіргіш апериодты буынмен модельденеді, параметрлері:
kтп=(15+2*8) =31; TТП=(0. 05+0. 001*8) =0. 058, c.
Тиристорлы функциясы:
WTП(р) =31/(0, 058р+1)
Г - генератор, апериодтық буын:
kг=0. 1(13+0. 1*8) =1. 38; Tг=0. 01(8+8) =0. 16, c.
WГ(р) =1, 38/(0, 16р+1)
ОСН - керену бойынша болатын иілмелі кері байланыс, инерциялы - дифференциялдық буын
kосн=0. 1(1. 5+0. 1*8) =0. 23; Tосн=0. 01(5+8) =0. 13, c.
WОСН(р) =0, 00299р/(0, 013р+1)
ТГ - тахогенератор, күшейткіш (пропорционалды) буын:
kтг=0. 01(2+0. 3*8) =0. 044, [B*сек/айн]
WТГ(р) = kтг=0, 044
ДПТ - тұрақты тоқ двигателі, тербелістік буын:
kду=0. 1(12+N) =2, [айн/(сек*В) ] ; kдв=0, 05(15+N) =1. 15, [айн/сек*Н*м] ;
Тя=0. 01(6+0. 32*N) =0. 0856, c; TM=0. 1(5+0. 5*N) =0. 9, c.
Басқару каналы бойынша болатын ДПТ беріліс функциясы, двигатель зәкіріндегі кернеудің оның вал айналысының жиілігіне әсер етуін анықтайды:
Wду(р) =2/(0, 07704р²+0, 9р+1)
Сырттан әсер ету каналы
Wдв(р) =-1, 15(0, 0856р+1) /(0, 07704р²+0, 9р+1)
Wдв(p) беріліс функциясы двигатель валындағым кедергі моментінің оның айналыс жиілігіне әсерін анықтайды. Валдағы кедергі моментін двигатель қозғалысқа келтіретін машинамен қоса тіркеледі.
Элементтердің беріліс функциялары мен функционалдық сұлбаның біріктілігі АРЖ құрылымды - алгоритмдік модельді құруға мүмкіндік береді, ол бүкіл АРЖ-нің беріліс функциясын көрсетеді. Программасы өте ыңғайлы болып келеді, ол АРЖ аналитикалық модельін жасағанда үлкен, көрнексіз бейне - суреттерді салу қажеттілігінен арылтады.
3. 1. Тұрақтылықты бағалау және байналысқан
АРЖ тұрақтандырылуы.
3. 1. 1. АРЖ құрылымдық сұлбасын құру.
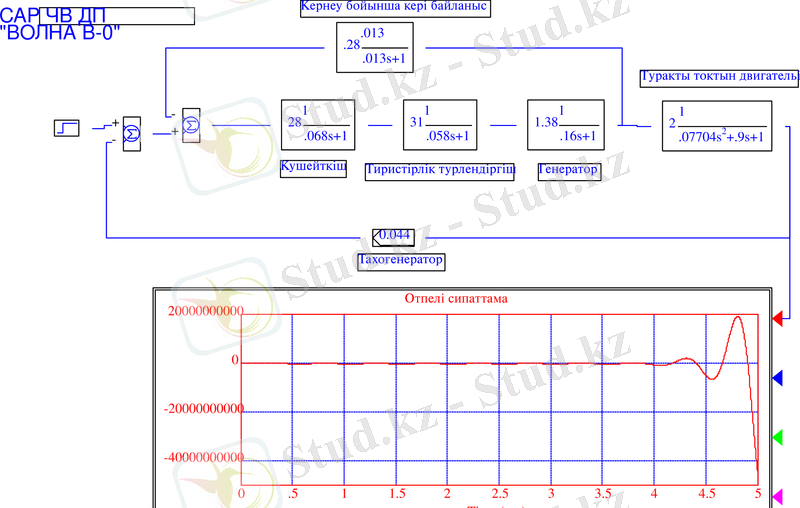
Vissim программасын іске қосып, «Волна В - 0» АРЖ модельінің құрылымдық сұлбасын құра бастаймыз, және де модельдеу процессін жүргіземіз.
Жұмыс ыңғайлы түрде жүру үшін шрифті орыс тілінде қойып аламыз: View - Fonts - Кириллица.
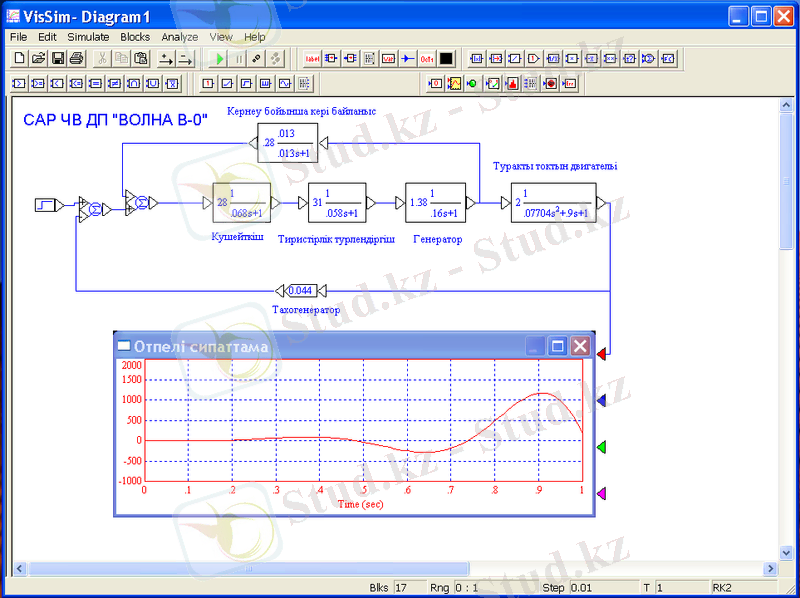
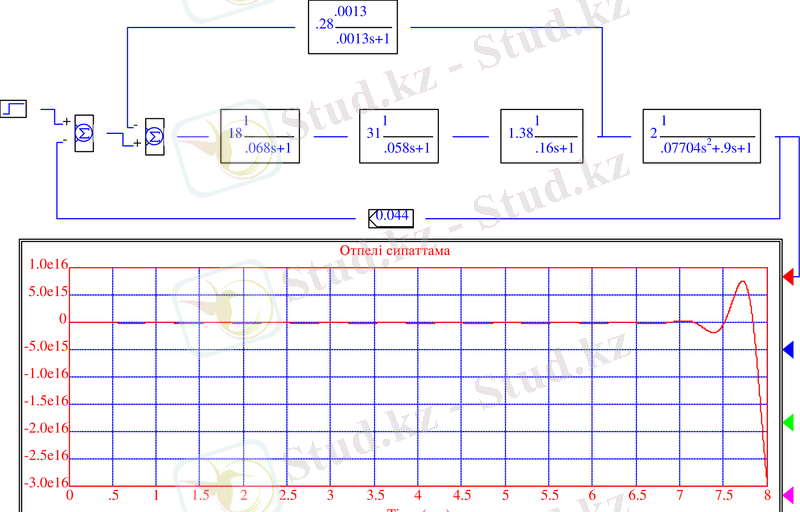
Сур. 3 П2 АРЖ өтпелі сипаттамасы, ол уақыт ампитудасының жоғарлайтын толқындық процесті көрсетеді. Бұл АРЖ тұрақсыз.
Суреттерді сақтап, басуға шығару үшін Print Screen клавишасын басып Paint программасында (Пуск - Программа - Стандартные - Paint) Правка - Вставить пунктін басамыз. Суретті ұқыпты түрде қиып алып және құжатта сақтау керек.
VisSim жұмыс кеңістігіне блоктарды шығару және оларды байланыстыру
Қадамды сигналдың Генераторы (step) Bloks - Signal Producer - Step менюінен шығарылады.
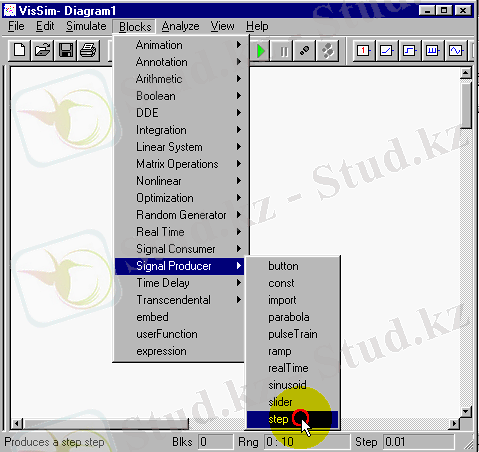
Сур. 4 VisSim жұмыс істеу аумағындағы step блогын шығару (сигналдың сатылы генераторы)
Одан Сумматорды шығарамыз: Bloks - Arithmetic - Summing Sunction.
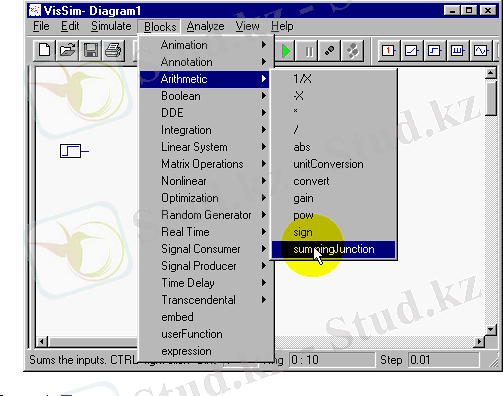
Сур. 5 Сумматордың шығу реті, оның кірісін генератордың шығысына қосамыз.
Осы жолмен екінші сумматор шығарылып қосылады.
Апериодтық, тербелістік буындар мен жоғарғы ретті буындар, сонымен бірге ПИ - түрлендіргіш transfer Function - жалпы түрдегі сызықты блок көмегімен модельденген жеңіл болады.
Жалпы түрдегі сызықты блок (transfer Function) мына түрде шығарылады: Blocks linear System - transfer Function.
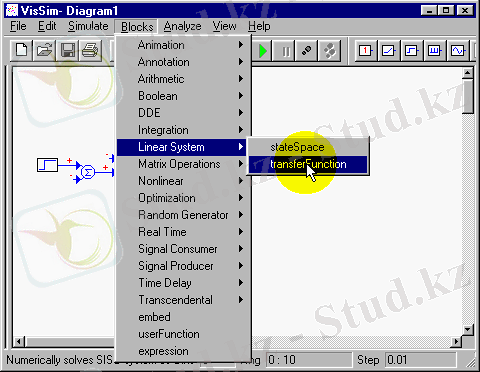
Сур. 6 TransferFunction (Беріліс функция) блок ретінің шығуы - жалпы түрдегі сызықты блок және оның сумматорға қосылуы.
Осылайша АРЖ-нің жеке элементтерін модельдейтін сызықты блоктар шығарылады.
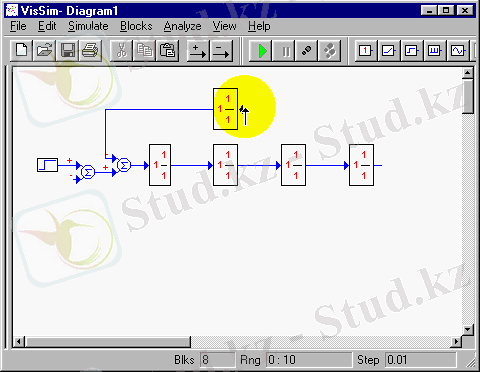
Сур. 7 Кернеу бойынша кері байланысқа сәйкес келетін сызықты блок ретімен шығуы, 180°-қа бұрылуы және қосылуы.
Күшейткіш (gain) Blocks - Arithmetic - gain менюінен шығарылады.
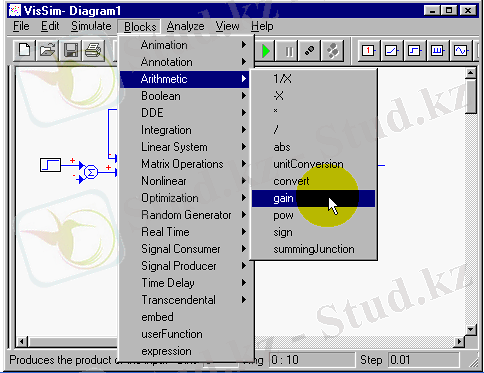
Сур. 8 gain (күшейткіш) блогының бұрылуы және қосылуы.
Осциллографты (plot) Blocks - Signal Consumer - plot менюдегі батырмаларды басу арқылы шығарамыз.
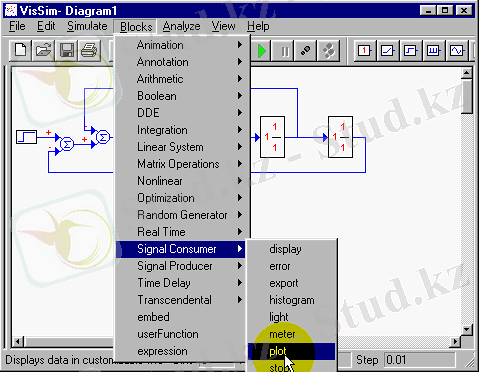
Сур. 9 plot (осциллограф) блогының бұру және оны қосу.
Жұмыс кеңістігіндегі мәтіндік түсіндемелер label (Blocks - Annotation - label) менюі көмегімен жазылады.
Блок параметрлерінің жұмысы
Одан кейін жеке блоктардың парметрлерін беру керек, олар өз тағайындалуына сәйкес болу керек, яғни олардың беріліс функциялары АРЖ-не есептелген түрде болғаны дұрыс.
Күшейткіш
Күшейткіш блогінің үстінен сол жақ батырманы екі рет не оң жағымен бір рет шертіп, пайда болған терезеде беріліс функциясының күшейту мәндерін және бөлімі коэффиценттерін енгізу керек.
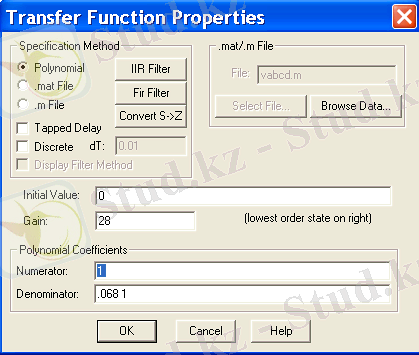
Сур. 10 Күшейткіштің параметрлерін беру. Gain (күшейткіш) 28, Numerator (алымы) 1, Denominator (бөлімі) .
Одан кейін ОК-ді басу керек.
Осы түрде тиристорлы түрлендіргіш пен генератор параметрлерін енгіземіз, өйткені олар күшейткіш сияқты апериодтық буындармен модельденеді.
Тұрақты тоқ двигателі.
Двигатель болашақ модельіне екі рет шертіп, диалогтік терезеге беріліс функциясымен сәйкес параметрлерді енгіземіз.
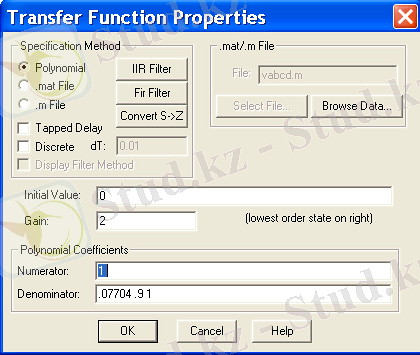
Сур. 11 Тербеліс буының параметрлерін беру, мұнда тұрақты тоқтың двигательі модельденеді.
Бөлімі полиномының коэффиценттері оның дәрежесінің кему ретімен енгізіледі де пробелдермен бөлінеді.
Кернеу бойынша кері байланыс буыны (ОСН) .
Параметрлерді енгізудің ерекшелігі бар: санағыш бос мүшесі болмайды, бұл жөнінде Vissim-де бос мүше коэффицентінің нольдік мәнін белгілеп көрсету керек.
Сур. 12 ОСН буының беріліс функциясының алымы мен бөлімінің коэффиценттері және күшейтудің мәні.
Тахогенератор инерциясыз күшейткішпен модельденеді, оның қасиеттер терезесіне тек күшейту коэффицентінің мәнін орнату керек.
Нәтижесінде модель құрылады.
3. 1. 2. Модельді алғашқы рет іске қосу
Жасыл үшбұрышы бар Пуск батырмасына шерту керек, есептеу нәтижесінде бастапқы АРЖ өтпелі сипаттамасы құрылатын болады, бұдан бастапқы АРЖ орнықсыз екені көрінеді. Сол себепті элементтер параметрлерінің, әлде АРЖ құрылымының түзетілуі қажет, бұл әрекет оның тұрақтылығын қамтамасыз ету үшін жүргізіледі.
Диаграмманы Isch_SAR. vsm атауымен жеке папкада сактаймыз.
3. 2. АРЖ-нің параметрлік тиімделуі
3. 2. 1. Байланыспаған АРЖ-нің тұрақтандырылуы
Негізгі кері байланыс контурын ағытып тастаймыз, оны осциллографқа қосамыз және модельдеуді іске қосамыз:
Сур. 13 Тұйық контурдың тұрақтылығын тексеру. Өтпелі функцияның графигі тұйық контурда тұрақсыз.
Тербелістер саны өте көп болып кетпес үшін модельдеу уақытын азайту қажет болуы мүмкін. Ол үшін Vissim негізгі менюінде: Simulate - Simulation Properties - Range бөлімшесінде End параметірінің қажетті мәнін орнатамыз. Сонымен қатар, Step Size -дің интегралдау қадамын 0, 001 мөлшерінде орнатудың мағынасы бар. ОК-ді басамыз. Модельдеуді іске қосамыз.
Байланыспаған АРЖ-нің тұрақтылығының жоғалуы жергілікті кері байланысының боуынан туындайтын байқау қиын емес (тұрақты буындардан жасалған және кері байланыстары бар жүйелер тұрақтылықты жоғалта алады) . Бұл байланыс жеткілікті тұрақтылықпен нәтиже беретін АРЖ сапасын қамтамсыз ету үшін енгізілгені жөнінде айта кеткен жөн.
Күшейткіштің күшейту коэффицентін азайтумен контурді тұрақтандыру
АРЖ-нің тұрақтандырылуы біраз практикалық тәжірибені талап етеді, соның негізінде қангдай буындарда параметрлердің өзгерісін жасауға болатынын анықтауға болады. Берілген жағдайда байланыспаған контурдің тұрақтандырылуын екі элементтің күшейткіш пен кері байланыс буынының параметрлерін өзгерте отырып жасауға болады: алдымен күшейткіштің күшейту коэффицентін азайтып көреміз, азайтуды байланыспаған контур және тұрақсыз режимдерінің шегіне жақын болған жағдайға дейін келтіреміз.
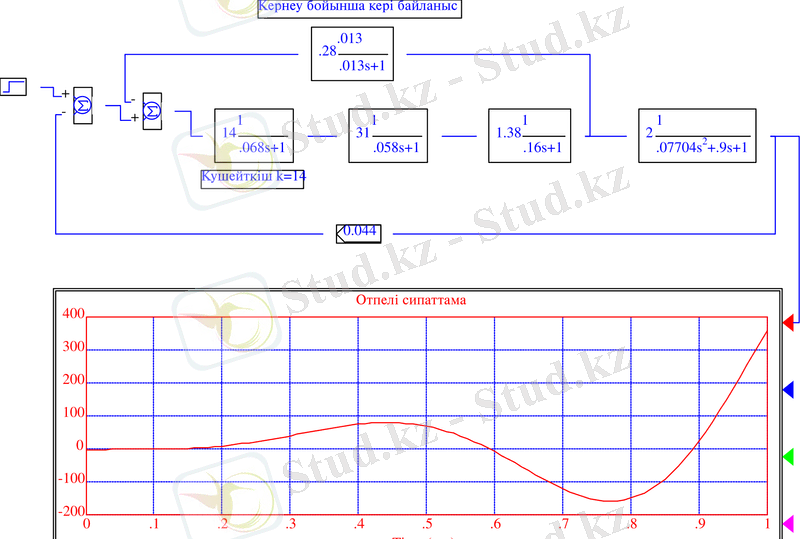
Сур. 14 Күшейту коэффицентінің күшеюін 28-ден 14-ке төмендетеміз.
Енді байланыспаған АРЖ-ні тұрақтандыруға болады, бұл әрекет пен жергілікті кері байланыс контуріне ең болмағанда минималды, екі ретті тұрақтылық қоры қамтамасыз етіледі. Сол үшін күшейткіштің күшейту коэффицентін екі есе азайтамыз.
Сур. 15 Тұрақтандырылған тұйық автоматты реттеу жүйесі.
Осылайша, күшейткіштің күшейту коэффицентін ғана өзгертіп, байланыспаған контурдің қажетті сипаттамаларын ала алмаймыз. Сол себепті одан да тереңдетілген тұрақтандыруды жүргізу қажет.
Күшейткіштің параметрлерін және ОСН буынын өзгерту арқылы тұрақтандыру
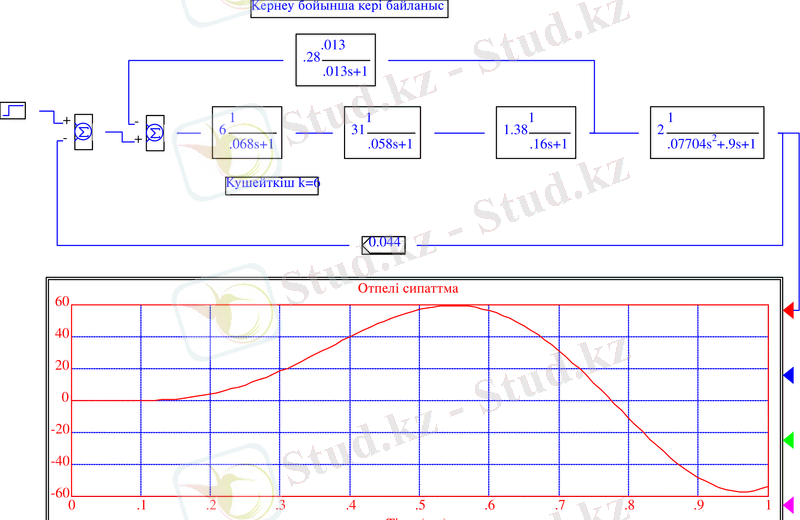
Байланысқан АРЖ-нің түзетілуіне (коррекциясына) көшеміз, өйткені байланыспаған контурдің тұрақтылығы - 6 Дб қормен қамтамасыз етіледі. Бірақта бұл қор салыстырмалы түрде аз болып келеді, бүкіл байланыспаған контурдің күшейтілуі де аз, мөлшері 1. 8, бұны біз П14 сур. контурдің өтпелі функциясының мәнінен көре аламыз. Сондықтан да, АРЖ-нің соңғы түзетілуі кезінде мүмкін пайда болатын қиындықтарды болдырмау үшін ОСН буынының параметрлерін де өзгертеміз.
Байқаулар мен қателіктер әдісімен ОСН-нін инерциялы - дифференциялдық буын уақытының тұрақтысын және күшейткіштің күшейтілуін өзгертеміз. Бұндағы мақсат - П13 сур. сұлбасында көрсетілген 28 мәнінен әлдеқайда асатын күшейту мәні бар тұрақтылық шегіне байланыспаған контурді әкелу. Vissim бұл кезде үлкен есептің жұмысты орындап жатады, дегенмен, зерттеуші параметрлерді жеңіл өзгертіп, программаны оңай есепке қоса алады.
Күшейткіш пен ОСН буынының параметрлерінің өзгерісі диалогты терезеде жүргізіледі, терезе сәйкес блоктарға екі рет шертумен шақырылады.
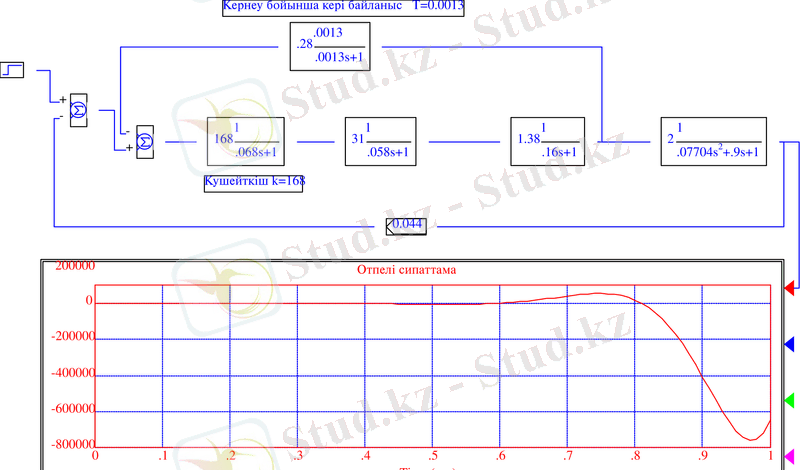
Сур. 16 ОСН-нің тұрақты уақытының 0, 0013-ке дейін төмендеуі күшейткіштің күшею коэффицентін критикалық жағдайға әкеледі.
Енді жергілікті кері байланыс контурінің амплитудасы бойынша тұрақтылық қорын қасмтамасыз ету керек, оны күшейткіштің күшейту коэффицентін азайту арқылы жасайды.
Сур. 17 Контурдың шешуші АРЖ-нің тұрақтандырылған тұйық күйі.
Сонымен байланыспаған АРЖ тұрақтандырылды. Сондықтан, байланысқан АРЖ сипаттамалары Найквист тұрақтылық критерийінің позициясы бойынша анализдеуі жүре алады.
АРЖ-нің байланыспаған түріндегі тұрақтандырылған диаграмманы сақтаймыз.
Байланысқан АРЖ тұрақты бола ма, белгісіз. Байланыспаған контурі (АРЖ-нің) тұрақтандырылды. Енді кері байланысты байланыстырып, АРЖ өтпелі сипаттамасы қалай болатынын тексереміз.
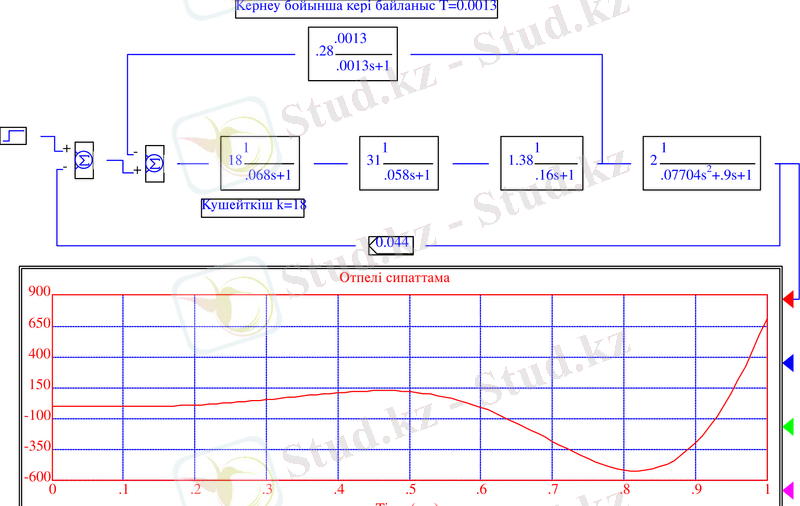
Сур. 18 Жүйе тұрақсыз, бірақ өтпелі сипаттамның тербелісі аз.
3. 2. 2. Байланысқан «Волна В-0» АРЖ-нің алдын - ала түзету
Байланысқан АРЖ-ні алдын - ала түзету байланыспаған контурдің күшейту коэффицентінің мәндерін өзгерту және тиімдеу әдісімен іске асырылады. Бұл коэффицентті техникалық түрде өзгертуге болады, ол үшін П16 суретіндегі сұлбада сумматорлар арасына П - реттегішін (күшейткіш - gain) орнатып, күшейтілуін өзгерту керек, ал оның мәнін қадағалау өтпелі функцияның тұрақталған мәні бойынша жүргізіледі. Басқару контурінің күшейту коэффицентінің өзгерісі ЛАЖС-нің тігінен жылжуынан әкеледі және ЛФЖС-ға әсер етпейді.
ЛАЖС мен ЛФЖС-ның құрылуы мен анализі
ЛАЖС мен ЛФЖС-ны (логарифмдік амплитудалы - жиіліктік және фазалық - жиіліктік сипаттамалар) құрмас бұрын сипаттамалар құрылатын орынның жиіліктік диапазонның шектерін белгілеу қажет. Бұл үшін Vissim программасында Analyze - Frequency Range әрекетін таңдау керек және шыққан терезеге диапазонның басы мен аяғын беру, енгізу қажет. Диапазон шектерінің мәндерін графиктерде олардың барлық сипаттамалық ерекшеліктері көрінетіндей етіп таңдау керек. Екінші жағынан, декадалар тым көп болмау керек, әйтпесе график өте кішкентай болып шығады. ҮШ декада алуға болады, мысалы 0, 1 рад/сек пен 100 рад/сек аралығынан (шектерді қоса есептегенде), декада - жиіліктің 10 рет өзгеріп отыруы.
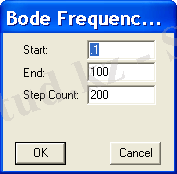
Сур. 19 ЛАЖС мен ЛФЖС құру үшін жиіліктік диапозонның бастапқы және соңғы мәндерін беру, және қадам санын көрсету.
Модельдің бақылаушы іске қосылуын жүргіземіз. өтпелі сипаттаманың тұрақталған мәнге асимптотикалық түрде ұмтылуын көз жеткізу қажет.
... жалғасыСіз бұл жұмысты біздің қосымшамыз арқылы толығымен тегін көре аласыз.
- Іс жүргізу
- Автоматтандыру, Техника
- Алғашқы әскери дайындық
- Астрономия
- Ауыл шаруашылығы
- Банк ісі
- Бизнесті бағалау
- Биология
- Бухгалтерлік іс
- Валеология
- Ветеринария
- География
- Геология, Геофизика, Геодезия
- Дін
- Ет, сүт, шарап өнімдері
- Жалпы тарих
- Жер кадастрі, Жылжымайтын мүлік
- Журналистика
- Информатика
- Кеден ісі
- Маркетинг
- Математика, Геометрия
- Медицина
- Мемлекеттік басқару
- Менеджмент
- Мұнай, Газ
- Мұрағат ісі
- Мәдениеттану
- ОБЖ (Основы безопасности жизнедеятельности)
- Педагогика
- Полиграфия
- Психология
- Салық
- Саясаттану
- Сақтандыру
- Сертификаттау, стандарттау
- Социология, Демография
- Спорт
- Статистика
- Тілтану, Филология
- Тарихи тұлғалар
- Тау-кен ісі
- Транспорт
- Туризм
- Физика
- Философия
- Халықаралық қатынастар
- Химия
- Экология, Қоршаған ортаны қорғау
- Экономика
- Экономикалық география
- Электротехника
- Қазақстан тарихы
- Қаржы
- Құрылыс
- Құқық, Криминалистика
- Әдебиет
- Өнер, музыка
- Өнеркәсіп, Өндіріс
Қазақ тілінде жазылған рефераттар, курстық жұмыстар, дипломдық жұмыстар бойынша біздің қор #1 болып табылады.

Ақпарат
Қосымша
Email: info@stud.kz