Төрт буынды механизмнің теңгеруші күшін анықтау: кинетостатикалық есептеу және Н.Е. Жуковский әдісімен тексеру

Жұмыс түрі: Курстық жұмыс
Тегін: Антиплагиат
Көлемі: 16 бет
Таңдаулыға:
Мазмұны
Кіріспе
«Механизмдер мен машиналар теориясы» - машина жасау пәндерінің ішіндегі ең негізгілерінің бірі болып есептеледі. Бұл пән механизмдермен машиналарды жобалауды және жалпы мәселелерді зерттеуге арналған. Машина жасаудың басты міндеті - өнеркәсіп барлық салаларын, ауыл шаруашылығымен ғылымды жоғары сапалы және жоғары өнімді механизмдермен, станоктармен және приборлармен қамтамасыз ету. Әр түрлі приборларда, машиналарда, автоматтарда және жаңа машиналармен механизмдердің жобасын жасауда механизмдер теориясы ерекше орын алады.
«Механизмдер мен машиналар теориясы» пәні бойынша курстық жұмыс машинажасау және политехникалық факультеттерінің инженерлік мамандықтар студенттерінің ең алғашқы жеке есептеу-графикалық жұмысы болып табылады. Курстық жұмысқа кіретін материалдар жалпы барлық курсты қамтиды.
Мақсаты: студенттерге осы курста машиналар мен механизмдердің ішкі құрылысын біліп, атқаратын қызметімен танысып, зерттеу және жобалауды үйрету.
Мен осы курстық жұмысымды механизмдердің күш анализі кинематикалық жұптардағы реакциялар күштерін және жетекші буынға әсерететін теңгеруші күшті аңықтадым. Осы аңықтау кинетостатикалық әдісі деп аталды. Жетекші звеноға әсер ететін күш шын мағынада қозғаушы күш болады. Осы күшті профессор Н. Е. Жуковскийдің «қатаң рычаг» әдісімен тексеру қажет, яғни теңгеруші күшті екі қайтара тауып, салыстырмалы қателік пайыз есебін табумен курстық жұмысымды аяқтадым.
Курстық жұмыстың мазмұны мен құрылымы
«Механизмдер мен машиналар теориясы» пәнінен курстық жұмыс 2 тараудан тұрады:
- Механизмдерді кинематикалық зерттеу
- Механизмдерді кинетостатикалық зерттеу
«Механизмдер мен машиналар теориясы» пәнінен
курстық жұмыстың тапсырмасы
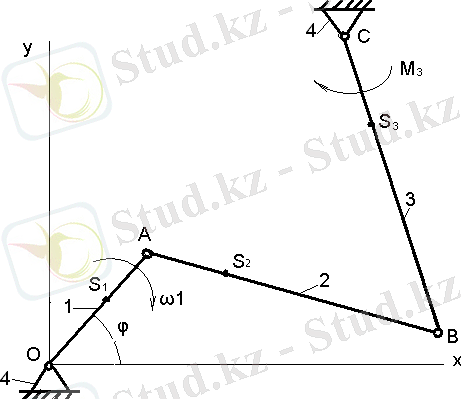
Тапсырма: Төрт буынды механизмнің өлшемдері, массалары, моменттері:
1.
 = 0, 25 м;
= 0, 25 м;
 =0, 55 м;
=0, 55 м;
 = 0, 60 м;
= 0, 60 м;
 = 0, 5 м;
= 0, 5 м;
 =0, 6 м;
=0, 6 м;
2. Буындардың ауырлық центрлерінің орны:
 Equation. 3 = 0, 1 м;
Equation. 3 = 0, 1 м;
 Equation. 3 = 0, 2 м;
Equation. 3 = 0, 2 м;
 Equation. 3 = 0, 25 м;
Equation. 3 = 0, 25 м;
3. Буындардың массалары:
m 1 =3 кг; m 2 =8 кг; m 3 = 12 кг;
4. Буындардың инерция моменттері:
L S1 = 0, 1 кг м 2 ; L S2 = 0, 3 кг м 2 ; L S3 = 0, 7 кг м 2 ;
5. Кривошип АО-ның айналу жиілігі n=1200айн/мин және сағат тілінің
бағытына қарсы айналады;
6. Үшінші буынға М 3 =1000 Нм айналмалы момент әсер етеді;
7. ϕ = 55 0 болғанда теңгеруші күшті табу керек және оны
Н. Е. Жуковскийдің «қатты» рычаг туралы теоремасымен тексеру керек
( Р тең )
Механизм звеноларының өлшемдерін ескере отырып масштабты
 м/мм аламын.
м/мм аламын.
Барлық өлшемдердің масштабтық мәндерін табамын:
 Equation. 3
Equation. 3
 Equation. 3
Equation. 3
 Equation. 3,
К
- масштабтық өлшем, мм; (1. 1), (1. 2)
Equation. 3,
К
- масштабтық өлшем, мм; (1. 1), (1. 2)
Н - нақты шама, м.
 Equation. 3 .
Equation. 3 .
Барлық өлшемдерді 1 кестеге түсіремін.
1кесте
 Equation. 3
Equation. 3
 Equation. 3
Equation. 3
 Equation. 3
Equation. 3
 Equation. 3
Equation. 3
 Equation. 3
Equation. 3
 Equation. 3
Equation. 3
 Equation. 3
Equation. 3
 Equation. 3
Equation. 3
 Equation. 3
Equation. 3
 Equation. 3
Equation. 3
 Equation. 3
Equation. 3
 Equation. 3
Equation. 3
 Equation. 3
Equation. 3
1 кестедегі масштабтық өлшемдерді пайдаланып механизм жоспарын тұрғызамын. Кез келген О нүктесін координаттар остерінің басы деп таңдаймызда, горизонталь ОХ және вертикаль ОУ остерін тұрғызамын. Радиусы ОА = 50 мм шеңбер тұрғызамын да, оны циркульдің көмегімен 12 бөлікке бөлемін. Бұл шеңбер А нүктесінің траекториясы болып табылады. Шеңбердегі бөліну нүктелерін А О , А 1 , А 2 , А 3 , …, А 11 , А 12 (А О ) деп белгілеймін.
 Equation. 3 = 100 мм және
Equation. 3 = 100 мм және
 Equation. 3 = 120 мм координаттарын пайдаланып
С
нүктесін табамын.
Equation. 3 = 120 мм координаттарын пайдаланып
С
нүктесін табамын.
В нүктесі С нүктесіндегі қозғалмайтын тіреуіштің маңында қайтымды айналмалы қозғалыс жасайтын болғандықтан центрін С - нүктесі деп алып радиусы ВС = 120 мм - ге тең доға тұрғызамын. АВ = 120 мм-ге тең екенін ескеріп, циркульді пайдаланып қию адісімен В нүктесінің 12 жағдайын анықтаймын, оларды В О , В 1 , В 2 , В 3 , … , В 11, В 12 (В 0 ) деп белгілейміз . Сәйкес А және В нүктелерін өзара қосып, А нүктелерін О нүктесімен, В нүктелерін С нүктесімен қосамын.
Жылдамдықтар жоспарын тұрғызу ыңғайлы болу үшін механизмдер жоспарын 4 сызбаға, әр қайсысына 3 жоспардан тұрғызамын.
I. Сызба φ = 0 0 , 30 0 , 60 0 ;
II. Сызба φ = 90 0 , 120 0 , 150 0 ;
III. Сызба φ = 180 0 , 210 0 , 240 0 ;
IV. Сызба φ = 270 0 , 300 0 , 330 0 .
1. 2 Жылдамдықтар жоспарын тұрғызу
Механизмнің 12 жағдайына жылдамдықтар жоспарларын тұрғызамыз. Жылдамдықтар жоспарларын механизмнің φ=0 0 жағдайына тұрғызудан бастаймыз. Кривошиптің бұрыштық жылдамдығы ω 1 мына формуламен табылады.
ω
1
=
 =
=
 =
125. 6c
-1
=
125. 6c
-1
Ол үшін кривошиптің А нүктесінің сызықтық жылдамдығын келесі формуламен анықтап аламын:
V
А
= ω
1
 = 125. 6 * 0, 25 = 31. 4 м/с
= 125. 6 * 0, 25 = 31. 4 м/с
Жылдамдықтар жоспарының масштабын анықтаймын.
Егер
 = 104 мм деп алсақ:
= 104 мм деп алсақ:
 .
.
Кез келген жерден
р
- нүктесін белгілеп аламыз, бұл нүкте жылдамдықтар жоспарының полюсі болып есептеледі.
p
нүктесінен кривошиптің
ОА
О
жағдайына перпендикуляр түзу жүргіземін де, ω
1
- дің бағытымен
 = 104 мм - ге тең кескін тұрғызамын. Сонда
ра
векторы шартты түрде
А
О
нүктесінің абсолют толық жылдамдығын көрсетеді.
= 104 мм - ге тең кескін тұрғызамын. Сонда
ра
векторы шартты түрде
А
О
нүктесінің абсолют толық жылдамдығын көрсетеді.
В 0 нүктесінің жылдамдығын табу үшін келесі векторлық теңдеуді жазамын:
 Equation. 3 . (1. 3)
Equation. 3 . (1. 3)
Бұл теңдеудегі
А
-нүктесінің жылдамдығының
 Equation. 3 астын 2 рет сызамын, себебі - 2 рет белгілі: нақты шамасы және бағыты. Салыстырмалы жылдамдық векторының
Equation. 3 астын 2 рет сызамын, себебі - 2 рет белгілі: нақты шамасы және бағыты. Салыстырмалы жылдамдық векторының
 Equation. 3 тек қана бағыты белгілі (
В
нүктесі
А
нүктесіне қатысты айналмалы қозғалыс жасайтындықтан
АВ
-ға перпендикуляр бағытталған) . Сондықтан
Equation. 3 тек қана бағыты белгілі (
В
нүктесі
А
нүктесіне қатысты айналмалы қозғалыс жасайтындықтан
АВ
-ға перпендикуляр бағытталған) . Сондықтан
 Equation. 3 астын бір рет сызамын. Жылдамдықтар жоспарарындағы
а
о
нүктесі арқылы
АоВо-
ге перпендикуляр түзу жүргіземін.
Equation. 3 астын бір рет сызамын. Жылдамдықтар жоспарарындағы
а
о
нүктесі арқылы
АоВо-
ге перпендикуляр түзу жүргіземін.
В о нүктесі 3 ( СВ) звеноға тиісті, сондықтан В о нүктесінің белгісіз жылдамдығын С нүктесінің белгілі жылдамдығы арқылы көрсете аламын (V С =0) :
 . (1. 4)
. (1. 4)
V С = 0 болғандықтан жылдамдықтар жоспарында с нүктесі р нүктесінде жатады. Сондықтан с нүктесі (жылдамдық жоспарында) арқылы СВ 0 -ға перпендикуляр түзу жүргіземін.
Соңғы екі перпендикуляр тузулердің қиылысуынан b 0 нүктесін табамыз. Табылған Δ pa 0 b 0 - φ = 0 0 болғандағы жылдамдық жоспары.
S 1, S 2 , S 3 нүктелерінің орны жылдамдықтар жоспарында механизм мен жылдамдықтар жоспарларының ұқсастық теоремасы негізінде келесі пропорциялармен анықталады:

 ;
;

 ;
;

 .
.
Жылдамдықтар жоспарының:
 векторына
векторына
 нүктесінен
нүктесінен
 кескінің өлшеп саламын;
кескінің өлшеп саламын;
 векторына
векторына
 нүктесінен
нүктесінен
 кескінің өлшеп саламын да
кескінің өлшеп саламын да
 нүктесін полюспен (
р
) қосамын;
нүктесін полюспен (
р
) қосамын;
 векторына
векторына
 нүктесінен
нүктесінен
 кескінің өлшеп саламын.
кескінің өлшеп саламын.
. Механизмнің қалған 11 жағдайының жылдамдық жоспарлары осыған ұқсас есептедім.
Механизмнің 12 жағдайына анықталған жылдамдықтар мәндері 2-кестеге толтырамын.
2-кесте
Жылдамдық жоспарында:
 Equation. 3 векторы
А
нүктесінің абсолют жылдамдығын кескіндейді (V
А
=31. 4 м/с) ;
Equation. 3 векторы
А
нүктесінің абсолют жылдамдығын кескіндейді (V
А
=31. 4 м/с) ;
 Equation. 3 векторы
В
нүктесінің абсолют жылдамдығын кескіндейді (V
в
) ;
Equation. 3 векторы
В
нүктесінің абсолют жылдамдығын кескіндейді (V
в
) ;
 векторы
В
нүктесінің
А
нүктесіне қарағандағы салыстырмалы жылдамдығын кескіндейді
векторы
В
нүктесінің
А
нүктесіне қарағандағы салыстырмалы жылдамдығын кескіндейді
 ;
;
 векторы
S
1
нүктесінің абсолют жылдамдығын кескіндейді (
векторы
S
1
нүктесінің абсолют жылдамдығын кескіндейді (
 ) ;
) ;
 векторы
S
2
нүктесінің абсолют жылдамдығын кескіндейді (
векторы
S
2
нүктесінің абсолют жылдамдығын кескіндейді (
 ) ;
) ;
 векторы
S
3
нүктесінің абсолют жылдамдығын кескіндейді (
векторы
S
3
нүктесінің абсолют жылдамдығын кескіндейді (
 ) .
) .
 ,
,
 ,
,
 ,
,
 ,
,
 кескіндерін графикалық әдіспен жылдамдықтар жоспарынан анықтаймын.
кескіндерін графикалық әдіспен жылдамдықтар жоспарынан анықтаймын.
Белгісіз жылдамдықтарды есептеймін (сандық мәнін) :
 ;
;
 ;
;
 ;
;
 ;
;
 .
.
Механизмнің 2 ( АВ ) және 3 ( ВС ) звеноларының бұрыштық жылдамдықтарын анықтадым:
 ;
;
 .
.
Осымен жылдамдық жоспарын тұрғызуды аяқтадым. Механизмнің қалған 11 жағдайының жылдамдық жоспарлары осыған ұқсас тұрғызылады.
Механизмнің 12 жағдайына анықталған жылдамдықтар мәндері 3-кестеге толтырамын.
3-кесте
2 Механизмдерді кинетостатикалық зерттеу ( № 2 парақ )
2. 1 Механизмнің жоспарын тұрғызу
Берілген φ=55 0 пайдаланып механизмнің жоспарын тұрғызамыз (1 сызба ) .
Механизмнің жоспарын тұрғызу үшін
 Equation. 3 м/мм масштабын қабылдаймыз. Механизмнің жоспарын 1-ші парақтағыдай тұрғызамын.
Equation. 3 м/мм масштабын қабылдаймыз. Механизмнің жоспарын 1-ші парақтағыдай тұрғызамын.
Кривошиптің бұрылу бұрышы φ=55 0 -ты бұрыштары 90 0 , 45 0 , 45 0 үшбұрышты сызғыштар немесе циркуль көмегімен тұрғызамын.
2. 2 Жылдамдықтар жоспарын тұрғызу
Жылдамдықтар жоспарын (2 сызба ) 90 0 - қа бұрып тұрғызамыз (теңгеруші күшті Жуковский әдісімен анықтау үшін осылай тұрғызу қажет) .
А нүктесінің жылдамдығын анықтаймын:
V
А
= ω
1
 Equation. 3 = 125. 6
*
0, 25 =31. 4 м
/с
Equation. 3 = 125. 6
*
0, 25 =31. 4 м
/с
Жылдамдықтар жоспарының
 Equation. 3
Equation. 3
 масштабын қабылдаймын.
масштабын қабылдаймын.
Жылдамдықтар жоспарындағы
 кесіндісінің шамасын өз еркіммен алдым:
кесіндісінің шамасын өз еркіммен алдым:

 .
.
Жылдамдықтар жоспарындағы
 векторы
А
нүктесінің абсолют жылдамдығын кескіндейді (V
А
= 31. 4 м/с) ;
векторы
А
нүктесінің абсолют жылдамдығын кескіндейді (V
А
= 31. 4 м/с) ;
В нүктесінің жылдамдығын анықтау үшін векторлық теңдеу құрамын
(белгісіз шаманы белгілі шама арқылы көрсететін принцип бойынша)
 Equation. 3 (2. 1)
Equation. 3 (2. 1)
Негізінде (2. 1. 2. ) теңдеуіне кіретін жылдамдықтар векторларының бағыттары:
 Equation. 3
ВС
,
Equation. 3
ВС
,
 Equation. 3
ОА
,
Equation. 3
ОА
,
 Equation. 3
АВ
.
Equation. 3
АВ
.
Біздер жылдамдықтар жоспарын 90 0 бұрып тұрғызатын болғандықтан олардың бағыттары:
 Equation. 3 //
ВС
,
Equation. 3 //
ВС
,
 Equation. 3 //
ОА
,
Equation. 3 //
ОА
,
 Equation. 3 //
АВ
.
Equation. 3 //
АВ
.
(2. 1) векторлық теңдеуге сәйкес кез-келген
р
(жылдамдықтар жоспарынын полюсі) нүктесінен
 Equation. 3
(II ОА)
кескіндейтін
Equation. 3
(II ОА)
кескіндейтін
 Equation. 3 кескінін өлшеп саламын.
Equation. 3 кескінін өлшеп саламын.
 Equation. 3 нүктесінен
Equation. 3 нүктесінен
 (
IIАВ
) векторының бағытын,
р
нүктесінен
(
IIАВ
) векторының бағытын,
р
нүктесінен
 (
IIВС
) векторының бағытын жүргіземін. Осы бағыттардың қиылысу
в
-нүктесі бұрылған
(
IIВС
) векторының бағытын жүргіземін. Осы бағыттардың қиылысу
в
-нүктесі бұрылған
 и
и
 векторларын кескіндейді.
векторларын кескіндейді.
 және
және
 кесінділерінің шамасын сызбадан графикалық әдіспен анықтаймын.
кесінділерінің шамасын сызбадан графикалық әдіспен анықтаймын.
S 1, S 2 , S 3 нүктелерінің орны жылдамдықтар жоспарында механизм мен жылдамдықтар жоспарларының ұқсастық теоремасы негізінде келесі пропорциялармен анықталады:
 Equation. 3
Equation. 3
 Equation. 3 ;
Equation. 3 ;
 Equation. 3
Equation. 3
 Equation. 3
Equation. 3
 Equation. 3 ;
Equation. 3 ;
 Equation. 3
Equation. 3
 Equation. 3
Equation. 3
 Equation. 3 .
Equation. 3 .
Жылдамдықтар жоспарының:
 векторына
векторына
 нүктесінен
нүктесінен
 кескінің өлшеп саламын;
кескінің өлшеп саламын;
 векторына
векторына
 нүктесінен
нүктесінен
 кескінің өлшеп саламын да
кескінің өлшеп саламын да
 нүктесін полюспен (
р
) қосамын;
нүктесін полюспен (
р
) қосамын;
 векторына
векторына
 нүктесінен
нүктесінен
 кескінің өлшеп саламын.
кескінің өлшеп саламын.
Жылдамдық жоспарында:
 векторы
А
нүктесінің абсолют жылдамдығын кескіндейді (V
А
=31. 4 м/с) ;
векторы
А
нүктесінің абсолют жылдамдығын кескіндейді (V
А
=31. 4 м/с) ;
 векторы
В
нүктесінің абсолют жылдамдығын кескіндейді (V
в
) ;
векторы
В
нүктесінің абсолют жылдамдығын кескіндейді (V
в
) ;
 векторы
В
нүктесінің
А
нүктесіне қарағандағы салыстырмалы жылдамдығын кескіндейді
векторы
В
нүктесінің
А
нүктесіне қарағандағы салыстырмалы жылдамдығын кескіндейді
 ;
;
 векторы
S
1
нүктесінің абсолют жылдамдығын кескіндейді (
векторы
S
1
нүктесінің абсолют жылдамдығын кескіндейді (
 ) ;
) ;
 векторы
S
2
нүктесінің абсолют жылдамдығын кескіндейді (
векторы
S
2
нүктесінің абсолют жылдамдығын кескіндейді (
 ) ;
) ;
 векторы
S
3
нүктесінің абсолют жылдамдығын кескіндейді (
векторы
S
3
нүктесінің абсолют жылдамдығын кескіндейді (
 ) .
) .
 ,
,
 ,
,
 ,
,
 ,
,
 кескіндерін графикалық әдіспен жылдамдықтар жоспарынан анықтаймын.
кескіндерін графикалық әдіспен жылдамдықтар жоспарынан анықтаймын.
Белгісіз жылдамдықтарды есептеймін (сандық мәнін) :
 ;
;
 ;
;
 ;
;
 ;
;
 .
.
Механизмнің 2 ( АВ ) және 3 ( ВС ) звеноларының бұрыштық жылдамдықтарын анықтадым:
 ;
;
 .
.
2. 3 Үдеулер жоспарын тұрғызу
Үдеулер жоспарын тұрғызамыз (3 сызба) .
Белгілі О нүктесінің үдеуі арқылы А нүктесінің үдеуін анықтаймын.

 , (2. 2)
, (2. 2)
Ал:
 ,
,
 , (2. 3)
, (2. 3)
 , (ω
1
= const - сондықтан ε=0) (2. 4)
, (ω
1
= const - сондықтан ε=0) (2. 4)
Олай болса (2. 2) теңдеуі келесі түрге айналады:
 . (2. 5)
. (2. 5)
 .
.
Үдеулер жоспарының масштабын таңдаймын:
 .
.
 кесіндісі үдеулер жоспарында
А
нүктесінің үдеуін
кесіндісі үдеулер жоспарында
А
нүктесінің үдеуін
 бейнелейді.
бейнелейді.
В нүктесінің үдеуін белгілі А нүктесінің үдеуі арқылы табамыз. Ол үшін келесі векторлық теңдеу жазамын:
 Equation. 3, (2. 6)
Equation. 3, (2. 6)
ал:
 Equation. 3, (2. 7)
Equation. 3, (2. 7)
онда (2. 6) теңдеуі мынадай түрге келеді:
 Equation. 3 . (2. 8)
Equation. 3 . (2. 8)
(2. 8) теңдеуінде
А
нүктесінің үдеуінің нақты шамасы мен бағыты бізге белгілі болғандықтан астын екі рет сызамын.
 Equation. 3 болғандықтан
Equation. 3 болғандықтан
 векторы 1 (
ОА)
звеноға параллель
А
нүктесінен
О
нүктесіне қарай бағытталған (айналу центріне қарай) .
векторы 1 (
ОА)
звеноға параллель
А
нүктесінен
О
нүктесіне қарай бағытталған (айналу центріне қарай) .
А нүктесіне қатысты В нүктесінің нормаль үдеуі де екі рет белгілі: нақты шамасы мен бағыты.
 Equation. 3
Equation. 3
 Equation. 3 векторы 2 (
АВ
) звеноға параллель
В
нүктесінен
А
нүктесіне қарай бағытталған.
Equation. 3 векторы 2 (
АВ
) звеноға параллель
В
нүктесінен
А
нүктесіне қарай бағытталған.
 Equation. 3 векторы
А
нүктесіне қарағандағы
В
нүктесінің нормаль үдеуін кескіндейді -
Equation. 3 векторы
А
нүктесіне қарағандағы
В
нүктесінің нормаль үдеуін кескіндейді -
 Equation. 3 .
Equation. 3 .
 Equation. 3 .
Equation. 3 .
Сіз бұл жұмысты біздің қосымшамыз арқылы толығымен тегін көре аласыз.
- Іс жүргізу
- Автоматтандыру, Техника
- Алғашқы әскери дайындық
- Астрономия
- Ауыл шаруашылығы
- Банк ісі
- Бизнесті бағалау
- Биология
- Бухгалтерлік іс
- Валеология
- Ветеринария
- География
- Геология, Геофизика, Геодезия
- Дін
- Ет, сүт, шарап өнімдері
- Жалпы тарих
- Жер кадастрі, Жылжымайтын мүлік
- Журналистика
- Информатика
- Кеден ісі
- Маркетинг
- Математика, Геометрия
- Медицина
- Мемлекеттік басқару
- Менеджмент
- Мұнай, Газ
- Мұрағат ісі
- Мәдениеттану
- ОБЖ (Основы безопасности жизнедеятельности)
- Педагогика
- Полиграфия
- Психология
- Салық
- Саясаттану
- Сақтандыру
- Сертификаттау, стандарттау
- Социология, Демография
- Спорт
- Статистика
- Тілтану, Филология
- Тарихи тұлғалар
- Тау-кен ісі
- Транспорт
- Туризм
- Физика
- Философия
- Халықаралық қатынастар
- Химия
- Экология, Қоршаған ортаны қорғау
- Экономика
- Экономикалық география
- Электротехника
- Қазақстан тарихы
- Қаржы
- Құрылыс
- Құқық, Криминалистика
- Әдебиет
- Өнер, музыка
- Өнеркәсіп, Өндіріс
Қазақ тілінде жазылған рефераттар, курстық жұмыстар, дипломдық жұмыстар бойынша біздің қор #1 болып табылады.

Ақпарат
Қосымша
Email: info@stud.kz