Кинематикалық жұптардың жіктелуі, қозғалыс дәрежесі және Ассур топтары

Қазақстан Республикасының Білім және Ғылым Министрлігі
Семей қаласының Шәкәрім атындағы мемлекеттік университеті
“Тамақ өндірісінің машиналары мен аппараттары” кафедрасы
ОӨЖ №2
КИНЕМАТИКАЛЫҚ ЖҰПТАР
Орындаған: Маулимханова Г. О
Оқу тобы: ТО-311
Тексерген: Джилкишева А. Г
Семей 2015
Кинематикалық жұп - механизмнің өзара қозғалу мүмкіндігі бар екі бөлшегінің қосылысы. Бірінің ішкі, екіншісінің сыртқы бетіменқосылысатын бөлшектер (мысалы айналмалы топсалы, сырғымалы- бағыттауышты) төмен дәрежелі кинематикалық жұп құрайды; ал бір-бірімен сызықшада не нүктелерде қосылатын бөлшектері бар кинематикалық жұп жогары дәрежелі деп аталады
КИНЕМАТИКАЛЫҚ ЖҰПТАР ЖӘНЕ ОЛАРДЫ ЖІКТЕУ Кинематикалық жұп - өзара салыстырмалы қозғалыс жасай алатын екі буынның қосылысы. Бұл анықтамада кинематикалық жұпқа буындардың қосылысы, олардың салыстырмалы қозғалысын жасауға мүмкіндік беруі маңызды болып табылады. Кинематикалық жұпты құрай отырып буынның басқа буынмен нүктелер, сызықтар және беттер арқылы түйісуге мүмкіндік жасайтын жиынтығын кинематикалық жұптың элементі деп атайды. Кинематикалық жұп элементінің сипаты бойынша төменгі және жоғарғы болып бөлінеді. Кинематикалық жұптарда элементтер ретінде беттер болса, олар төменгі кинематикалық жұптар деп аталады. Буындар сызықтар мен нүктелер арқылы түйісетін болса, онда кинематикалық жұптар жоғарғы деп аталады. Төменгі кинематикалық жұптар қайтымды, яғни жұптың буындарының екеуінің да салыстырмалы қозғалысының сипаты бірдей; жоғарғы жұптар қайтымды емес, мысалы үшін, қозғалмайтын рельспен сырғанаусыз домалайтын доңғалақ нүктелерінің траекториялары - циклоидалар. Доңғалақты тоқтатып және оның бойымен рельсті домалататын болсақ, онда рельс нүктелерінің траекториялары эвольвенталар деп аталатын қисықтар болады, бұлар мүлдем басқа қисықтар
Кинематикалық жұп деп, жоғарыда көрсетілгендей, өз ара салыстырмалы қозғала алатын, жанасқан екі звеноның қосылысын айтады.
Басқа материалдық объектілердің, материалдық нүктенің немесе механикалық системаның қозғалыстарын шектеуді байланыс деп атаймыз.
Кинематикалық жұп өз құрамындағы звенолардың өз ара салыстырмалы қозғалысына белгілі U санды байланыс жасайды, мұның өзі осы жұптар звеноларының өз ара салыстырмалы қозғалысының еркіндік дәрежесін U санына кемітеді.
Осылайша кинематикалық жұп звеноларының еркіндік дәрежесін көрсететін
 саны мынаған тең болады:
саны мынаған тең болады:
немесе
(2. 3)
Байланыс U саны тек бүтін сан болады және бірден беске дейін өзгереді, яғни
(2. 4)

2. 3-сурет. І кластық кинематикалық 2. 4-сурет. ІІ кластық кинематикалық жұп.
Механизм деп бір немесе одан да көп денелердің қозғалысын басқа денелердің қозғалысына түрлендіруге арналған денелер жүйесін айтады. Сонымен қатар денелер жүйесі қозғалмайтын бір буынды тұйық кинематикалық тізбе құрайды, ондағы берілген бір немесе одан көп қозғаушы буындардың қозғалысы туралы заң бойынша, қалған буындар анықталған қозғалыс бойынша қозғалады. Кинематикалық тізбе деп өзара кинематикалық жұп құрайтын біріккен буындар жүйесін айтады. Кинематикалық жұп деп - салыстырмалы қозғалыс жасауға мүмкіндік беретін екі қосылатын буынның қосындысын айтады.
1. 1- сурет
Кинематикалық жұп бір немесе екі қозғалмалы буыннан құрыла алады (1. 1 - сурет) .
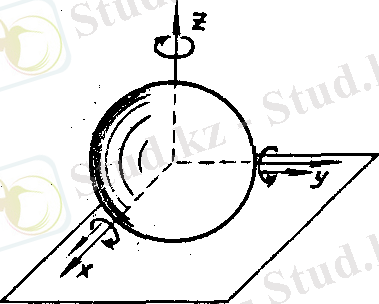
Бір буынның басқа буынға қатысты мүмкін тәуелсіз қозғалысы кинематикалық жұптың бостандық дәрежесі деп аталады. Кеңістікте бос қозғалатын дененің алты бостандық дәрежесі болады, яғни қозғалыс өзара перпендикулярүш ось
 бойымен және оны айнала айналмалы және жылжымалы қозғалыс жасайды (1. 2 - сурет) .
бойымен және оны айнала айналмалы және жылжымалы қозғалыс жасайды (1. 2 - сурет) .
Бір буынның екінші буынмен қосылуы екі буынның да тәуелсіз қозғалуына шектеу салады және оларға бір белгілі қозғалыс жасатқызады.
1. 2 - сурет
Кинематикалық жұптың буындарының салыстырмалы қозғалысына салынатын шектемелер кинематикалық жұптағы байланыс шарттары деп аталады.
Кинематикалық жұптар бес класқа бөлінеді. Кинемтикалық жұптың класы оның буындарының салыстырмалы қозғалысына салынатын байланыс санымен анықталады. Байланыс саны тек бүтін бола алады және алтыдан кем, бірақ бірден көп болу керек, яғни
 , мұндағы
, мұндағы
 - байланыс саны. Егер байланыс саны
- байланыс саны. Егер байланыс саны
 болса, онда кинематикалық жұп екі буынның байланыссыз қосылысына көшеді. Егер
болса, онда кинематикалық жұп екі буынның байланыссыз қосылысына көшеді. Егер
 , онда буындар қосылмайды және кинематикалық жұп жойылады. Кинематикалық жұптың бостандық дәредесінің саны тең
, онда буындар қосылмайды және кинематикалық жұп жойылады. Кинематикалық жұптың бостандық дәредесінің саны тең

 және
және
 - V кластық кинематикалық жұп қалыптасады;
- V кластық кинематикалық жұп қалыптасады;
 және
және
 - VІ кластық кинематикалық жұп;
- VІ кластық кинематикалық жұп;
 және
және
 - ІІІ кластық кинематикалық жұп;
- ІІІ кластық кинематикалық жұп;
 және
және
 - ІІ кластық кинематикалық жұп;
- ІІ кластық кинематикалық жұп;
 және
және
 - І кластық кинематикалық жұп.
- І кластық кинематикалық жұп.
Кинематикалық жұптармен жалғасқан буындар кинематикалық тізбек құрайды, бірақ ол механизм болу үшін тізбектің жетекші буындарының саны оның қозғалыс дәрежесі санына тең болу керек.
Кинематикалық жұп пен механизмнің қозғалыс дәрежесі деп қозғалмайтын буынға қатысты кинематикалық жұптың бостандық дәрежесінің санын айтамыз.
Қозғалыс дәрежесін анықтауға арналған формуланы алғаш рет 1869 жылы орыс ғалымы П. Л. Чебышев ұсынды. Чебышевтің формуласы бойынша жазық кинематикалық тізбектердің қозғалыс дәрежесі
 мынаған тең
мынаған тең
(1. 1)
мұнда
 - мезанизмнің қозғалмалы буындарының саны;
- мезанизмнің қозғалмалы буындарының саны;
 - V кластық кинематикалық жұптардың саны;
- V кластық кинематикалық жұптардың саны;
 - ІV кластық кинематикалық жұптардың саны.
- ІV кластық кинематикалық жұптардың саны.
Мысал ретінде қозғалыс дәрежесінің анықталуын 1. 3 суретте көрсетілген механизммен қарастыруға болады.
Механизм
О, А, В, С, D, Е
нүктелерінде кинематикалық жұптармен жалғасқан бес қозғалмалы буындардан
 тұрады. Барлық жұптарда бір бостандық дәрежесі бар, сондықтан олар V класқа
тұрады. Барлық жұптарда бір бостандық дәрежесі бар, сондықтан олар V класқа
 жатады. Осыдан:
жатады. Осыдан:
 , механизмде бір жетекші тізбек бар екенін көрсетеді.
, механизмде бір жетекші тізбек бар екенін көрсетеді.
Механизмдердің қарапайым құрылу принципін 1916 жылы Петербург политехни-калық институтының профессоры Л. В. Ассур ұсынған. Бұл принцип бойынша әр механизм қозғалыс дәрежесі нөлге тең кинематикалық тізбектің жетекші буынына қосылу жолы арқыл қалыптаса алады.
1. 3 - сурет
... жалғасыСіз бұл жұмысты біздің қосымшамыз арқылы толығымен тегін көре аласыз.
- Іс жүргізу
- Автоматтандыру, Техника
- Алғашқы әскери дайындық
- Астрономия
- Ауыл шаруашылығы
- Банк ісі
- Бизнесті бағалау
- Биология
- Бухгалтерлік іс
- Валеология
- Ветеринария
- География
- Геология, Геофизика, Геодезия
- Дін
- Ет, сүт, шарап өнімдері
- Жалпы тарих
- Жер кадастрі, Жылжымайтын мүлік
- Журналистика
- Информатика
- Кеден ісі
- Маркетинг
- Математика, Геометрия
- Медицина
- Мемлекеттік басқару
- Менеджмент
- Мұнай, Газ
- Мұрағат ісі
- Мәдениеттану
- ОБЖ (Основы безопасности жизнедеятельности)
- Педагогика
- Полиграфия
- Психология
- Салық
- Саясаттану
- Сақтандыру
- Сертификаттау, стандарттау
- Социология, Демография
- Спорт
- Статистика
- Тілтану, Филология
- Тарихи тұлғалар
- Тау-кен ісі
- Транспорт
- Туризм
- Физика
- Философия
- Халықаралық қатынастар
- Химия
- Экология, Қоршаған ортаны қорғау
- Экономика
- Экономикалық география
- Электротехника
- Қазақстан тарихы
- Қаржы
- Құрылыс
- Құқық, Криминалистика
- Әдебиет
- Өнер, музыка
- Өнеркәсіп, Өндіріс
Қазақ тілінде жазылған рефераттар, курстық жұмыстар, дипломдық жұмыстар бойынша біздің қор #1 болып табылады.

Ақпарат
Қосымша
Email: info@stud.kz