ПШН-8-3-5500 рычагты механизмі: кинематикалық, кинетостатикалық және динамикалық талдау мен Maple 16 бағдарламалық кешенін әзірлеу

Қазақстан Республикасының білім және ғылым министрлігі
Әл-Фараби атындағы Қазақ Ұлттық Университеті
«Қорғауға жіберілді» «»
Кафедра меңгерушісі Қалтаев А. Ж.
ф. -м. ғ. д., профессор
ДИПЛОМДЫҚ ЖҰМЫС
Тақырыбы: «ПШН-8-3-5500 ТЕРБЕЛМЕЛІ ҚҰРЫЛҒЫ РЫЧАГТЫ МЕХАНИЗМНІҢ КИНЕМАТИКАЛЫҚ ЖӘНЕ ДИНАМИКАЛЫҚ АНАЛИЗІН ЖАСАУ»
мамандық 050603 - «механика»
Орындаған Мұқажан Д. Б.
Ғылыми жетекші Сейдахмет А. Ж.
т. ғ. к., доцент
Нормоконтролер . . .
Алматы 2013
РЕФЕРАТ
Жұмыстың көлемі: елу алты бет, 26 сурет, екі кесте және 15 пайдаланылған әдебиеттен тұрады.
Зерттеу объектісі: ПШН-8-3-5500 тербелмелі станоктың рычагты механизмі.
Жұмыстың мақсаты: ПШН-8-3-5500 тербелмелі станоктың рычагты механизмінің звеноларының орын ауыстыруын, бұрыштық және сызықтық жылдамдықтары мен үдеулерін, топсалардағы реакция күштерін, кіріс звеносы болып табылатын кривошиптің теңгеруші моментін анықтау мақсатында кинематикалық, кинетостатикалық және динамикалық талдау жасау. Программалық кешен құру. Алынған есептеу нәтижелерін тәжірбиелік деректермен салыстырып, қорытынды жасау.
Жұмыстың өзектілігі: Қазақстан әлемде мұнай өндіретін елу бес алпауыт мемлекеттің ішінде мұнай қоры бойынша 12-ші орынды иеленеді. Елімізде мұнай өндірумен айналысатын 70 кен орны бар. Қазақстандай мұнай державасының мұнай ұңғымаларын қазіргі уақыттың талаптарына жауап беретін заманауи құрал жабдықтармен жабдықтау өзекті мәселенің бірі. Осыған орай құрылғыларды дамыту оларды автоматтандыру ісі толассыз дамып отыруы тиіс. Бұл дипломдық жұмыс Қазақстанның мұнай өндірісін дамытуға бағытталғандығымен құнды.
Зерттеу әдісі: Maple 16 программасын қолданып кинематикалық, кинетостатикалық және динамикалық теңдеулердің шешімдерін аналитикалық жолмен табу, Maple 16 жүйесінің графикалық мүмкіндіктерін пайдаланып қозғалыстың қарапайым 2D анимациясын құру арқылы ПШН-8-3-5500 тербелмелі станоктың рычагты механизмнің орналасу планы. .
Түйін сөздер: тербелмелі құрылғы, рычагты механизм, штангалық насос, привод, кинематикалық, динамикалық, күштік, анализ.
МАЗМҰНЫ
КІРІСПЕ
Дипломдық жұмыстың мақсаты ПШН-8-3-5500 тербелмелі станоктың рычагты механизміне кинематикалық және динамикалық талдау жасау. Мұнда кездесетін мәселелер, ол уақыттың әр мезетінде рычагты механизмнің жазықтықта қалай орналасатындығы, звеноларының жылдамдықтары мен үдеулері, оларға әсер ететін ауырлық және реакция күштерінің, теңгеруші және инерция моменттерінің шамасын анықтау. Есептің негізгі қолданылатын жерлері: ауыр өнеркәсіптік машина жасау саласы, мұнай өндіру саласы, машина жасау конструкторлық бюроларында және осы салаларға жақын тағы басқа үлкенді-кішілі салаларда.
Мұнай өндіру құрылғысының маңызды бөлігі болып табылатын тербелмелі станоктың рычагты механизміне қазіргі таңдағы заманауи сандық есептеу жүйелерін пайдалана отырып кинематикалық және динамикалық талдау жасау, яғни есеп барысында туындайтын теңдеулер мен олардың жүйелерінің аналитикалық шешімдерін табу көзделген. Алдында қолданылып жүрген графикалық есептеу, яғни жылдамдықтар, үдеулер және күштер планын тұрғызу арқылы есептеу әдісін звенолардың әр түрлі ұзындығы үшін қайта сызуға тура келеді және оның дәлдігі төмен болып келеді. Сол себепті Maple 16 жүйесінде программа құрылды.
НЕГІЗГІ ТҮСІНІКТЕР
Механизм (гр. mehane - құрал, машина ) - бір немесе бірнеше қатты денелерді басқа қатты денелер арқылы қажетті қозғалысқа келтіретін денелер жүйесі.
Жазық механизм - қозғалатын бөлшектердің бәрінің траекториясы бір қозғалмайтын бетке параллель беттерде жататын механизм.
Топсалы-рычагты механизм - бір бірімен цилиндрлік топсалармен байланысқан абсолют қатты денелерден тұратын және сол денелердің салыстырмалы айналуын шектемейтін механизм.
Буын - бір немесе бірнеше қатаң байланысқан бөлшектерден тұратын, қозғалыста бір дене сияқты қозғалатын қатты дене (механизмнің бөлігі) .
Тірек - механизмнің басқа буындары бекітілген, қозғалмайтын буын (көбінесе нөлінші номерлі болады) .
Шатун - екі немесе одан да көп басқа қозғалатын буындармен байланысқан және қозғалатын полюс бойында айналатын жазық-параллель қозғалыс жасайтын буын.
Сырғақ - бекітілген бағыттауыштар бойымен ілгерлемелі қозғалыс жасайтын буын.
Инерция күші -модулі материалдық нүктенің массасы мен осы нүктенің үдеуінің көбейтіндісіне тең, бағыты үдеуіне қарама-қарсы бағытталған күш.
Инерция моменті - айналмалы қозғалыстағы қатты дененің инерттілігінің өлшемі.
Еркіндік дәрежесі - дене немесе денелер жүйесінің орналасуын толық көрсететін тәуелсіз айналу немесе ілгерлемелі қозғалыстың координаталар жиынтығы (олардың уақыт бойынша туындысымен механикалық жүйенің күйін, яғни қозғалысын және орнын толық анықтайтын координаталар жиынтығы) .
1. ЕСЕПТІҢ ҚОЙЫЛЫМЫ
Берілгендер бойынша ПШН-8-3-5500 тербелмелі станоктың рычагты механизмінің кинематикасын, кинестостатикасы мен динамикасын зерттеу.
Практикалық жұмыс есебінің қойылымы келесілерде анықталады:
- Maple жүйесінде программа құру арқылы ПШН-8-3-5500 тербелмелі станоктың рычагты механизмінің кинематикалық талдауын жасау;
- Maple жүйесінде ПШН-8-3-5500 тербелмелі станоктың рычагты механизмінің жазық анимациясын жасау;
- Maple жүйесінде программа құру арқылы ПШН-8-3-5500 тербелмелі станоктың рычагты механизмінің динамикалық талдауын жасау;
- Maple жүйесінде программа құру арқылы ПШН-8-3-5500 тербелмелі станоктың рычагты механизмінің күштік (кинетостатикалық) талдауын жасау;
- Maple жүйесінде программа құру арқылы ПШН-8-3-5500 тербелмелі станоктың рычагты механизмінің топсаларындағы реакция күштерін және жетекші буындағы теңгеруші моментті тауып, графиктерін көрсету.
2. СКВАЖИНАЛЫҚ НАСОСЫНЫҢ МЕХАНИКАЛЫҚ ПРИВОДТАРЫ.
Отандық және шет елдік мұнай өндіру өнеркәсібінде скважиналық насосының механикалық приводтары кеңінен таралған. Олардың ерекшелігі - жетекші қозғалтқыш валының айналмалы қозғалысын штанганың іліну нүктесінің ілгерлемелі қозғалысқа түрлендіретін механикалық түрлендіргішті қолдану және де механикалық трансмиссияны қолдану болып табылады.
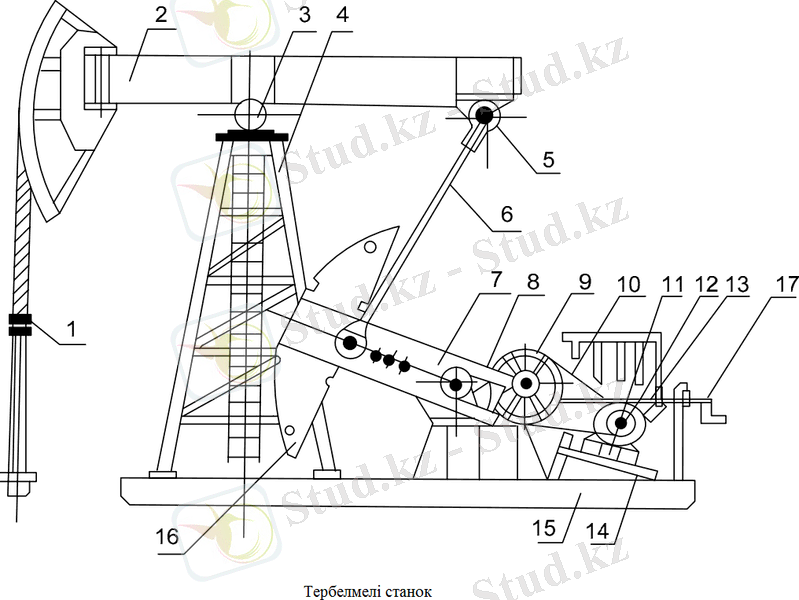
Сурет1. 1 -ауыз жағындағы штоктың және канаттың подвескасы; 2 - балансир (басымен бірге) ; 3 - балансирдің тірегі; 4 - діңгек; 5 - траверса; 6 - шатун; 7 - кривошип, 8 - редуктор; 9 - жетектегі шкив; 10 - бау; 11 - электрқозғалтқыш; 12 - жетекші шкив; 13 -қоршау; 14 - айналу салазкалары; 15 - рама; 16 - қарсы салмақ; 17 - тежегіш.
2. 1. МЕХАНИКАЛЫҚ ПРИВОДТАРДЫҢ ТҮРЛЕРІ
Механикалық приводтардың жеке және бірнеше скважинаны эксплуатациялауға арналған топтасқан түрлері болады.
Бірінші типке жататын приводтар қозғалтқыш, трансмиссиядан - түрлендіргіш механизмнен тұрады және тек қана бір насос штангасының колоннасының қозғалысын ғана қамтамасыз ете алады.
Екінші типтегі приводтар бір-біріне жақын орналасқан және ұқсас параметрлерге ие бірнеше скважина топтарын (2-ден 40-қа дейін) эксплуатациялауға арналған. Әдетте, топтық приводтар аз дебитті скважиналарды эксплуатациялауға арналған және қазіргі уақытта қолданылмайды.
Жеке механикалық приводта трансмиссия қозғалтқыштың валының айналу жиілігін штанганы бекіту нүктесінің қос қозғалысына сәйкес келетіндей етіпазайтады.
Трансмиссияның шығыс звеносының айналмалы қозғалысын штангалар колоннасын бекіту нүктесінің ілгерлемелі қозғалысына айналдыру механизмі теңестіруші құрылғы мен штанганы бекіту нүктесі арасындағы кинематикалық байланысты қамтамасыз етеді.
Жеке приводта қолданылатын трансмиссия, әдетте, қозғалтқыштан редуктордың кіріс валына баратын белбеулік берілістен тұрады. Редуктор екі немесе үш сатылы әр түрлі ілініспен орындалады.
Түрлендіргіш механизмнің схемасы мен оның типі құрылғы конструкциясына аса көп әсерін тигізеді. Механикалық приводтар түрлендіргіш механизмнің түріне байланысті екі топқа бөлінеді: балансирлі және балансирсіз. Біріншілерінде штанганың іліну нүктесінің ілгерлемелі қозғалысына қол былай жеткізіледі: тербелмелі рычаг - балансирді қолдану арқылы қол жеткізіледі. Ол трансмиссияның шығыс валымен кривошипті-шатунды механизмнің көмегімен байланысады.
Балансирсіз приводтарда штанганың іліну нүктесінің ілгерлемелі қозғалысынаиілгіш элементтері (арқандар мен шынжырлар) бар механизмдерді қолдану арқылы қол жеткізіледі.
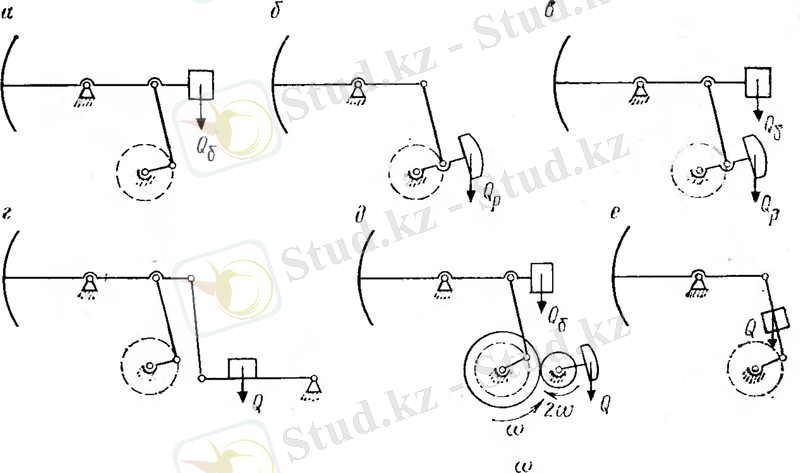
Сурет 2. Екіиінді балансирлік тербелмелі станоктардың механикалық теңгеру әдістері: а - балансирлі теңгеру; б - кривошипті (роторлық) теңгеру; в - құрамдастырылған теңгерім, г - өтірік тербелменің көмегімен теңгеру; д - екі еселенген жиілікпен айналатын противовестің көмегімен теңгеру; е - шатундық теңгерім
Жеке механикалық приводтардың негізгі типтерін олардың кинематикалық схемалары тұрғысынан қарастырайық.
Кинематикалық схемасы қос иінді немесе бір иінді рычаг түрінде жасалатын балансирдің конструкциясымен анықталады.
2. 2. БАЛАНСИРЛІ ТЕРБЕЛМЕЛІ СТАНОКТАР
Екі иінді балансирлі тербелмелі станоктар 3-суретте көрсетілгендей схемамен жасалады.
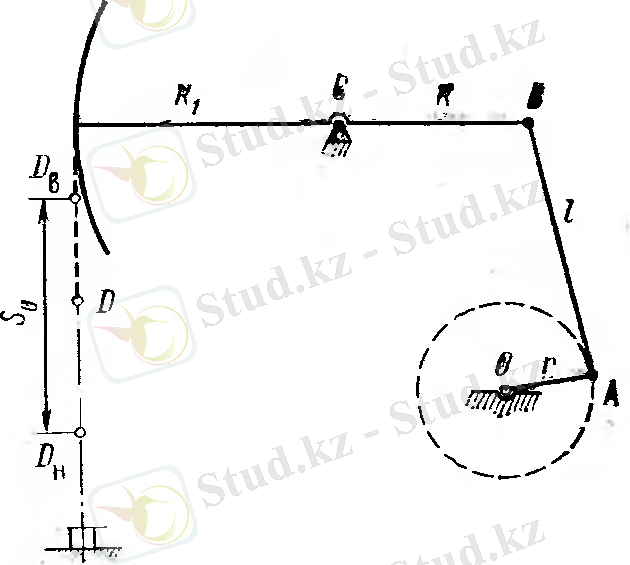
Сурет 3. Екіиінді балансирлі тербелмелі
станоктың кинематикалық схемасы
Мұнда балансирдің тірегі (С нүктесі) Dштанганы бекіту нүктесі мен балансирді B шатунымен бөлетін нүктелер арасында орналасқан. Күш балансирге бірнеше әдіспен берілуі мүмкін. Көбінесе бұл үшін балансирмен траверса арқылы байланысатын екі шатун пайдаланылады.
Механикалық балансирлі тербелмелі станоктар гравитациялық (яғни жүктемелік) немесе пневматикалық теңгеруші құрылғылармен жабдықталады. Теңгеретін жүктің орналасуының келесідей әдістері бар: балансирде, кривошипте, кривошипті балансирде, шатунда. Сәйкесінше приводтарды былай атайды: балансирлі, роторлы, құрамдастырылған және шатунды теңгерімді тербелмелі станоктар. Бұндайприводтардағы жүктерді орналатыру әдістерінің кинематикалық схемалары 3-суретте көрсетілген. Дипломдық жұмыс барысында қарастырылатын ПШН-8-3-5500 тербелмелі станоктың рычагты механизмі кривошипті (роторлық) әдіспен теңгерілген.
2. 3. ПШН ТҮРІНДЕГІ ШТАНГАЛЫҚ НАСОСТЫҢ ПРИВОДТАРЫ.
Қолданылуы: Түрлі өлшемдегі ПШН 6-2, 5-2800, ПШН 6-3-3500, ПШН 6-3-4000, ПШН 8-3-4000, ПШН 8-3-5500 штангалық насостардың приводтары макроклиматтық аймақтардағы орташа және суық ауа-райы жағдайында мұнайды терең ұңғымалардан өндіру кезінде қолдану үшін штангалық ұңғымалық насостың жеке механикалық приводына арналған. Пайдалану шарттары: Климаттық орындалуы - ГОСТ 15150 бойынша УХЛ Орналасу категориясы - ГОСТ 15150 бойынша «1» Шартты белгілері: ПШН - P - L - MПШН - Орыс тілінде «Привод штанговых насосов» - штангалық насостың приводтары;
Р - ауыз жағындағы жалғастыру өзегіндегі максималды жүктеме, кН;
L - ауыз жағындағы жалғастыру өзегінің максималды жүру ұзындығы, м;
M - редуктордың ақырын жүретін валындадағы ең үлкен бұраушы момент, кгс*м.
Мысалы, ауыз жағындағы жалғастыру өзегіндегі максималды жүктеме 80 кН, ауыз жағындағы жалғастыру өзегінің максималды жүру ұзындығы 3 м, редуктордың ақырын жүретін валындадағы ең үлкен бұраушы момент 5500 кгс*м-ге тең штангалық насостың приводы:
ПШН 8-3-5500

Сурет 4. ПШН-8-3-5500 тербелмелі станоктың рычагты механизмінің зертханалық нұсқасы.
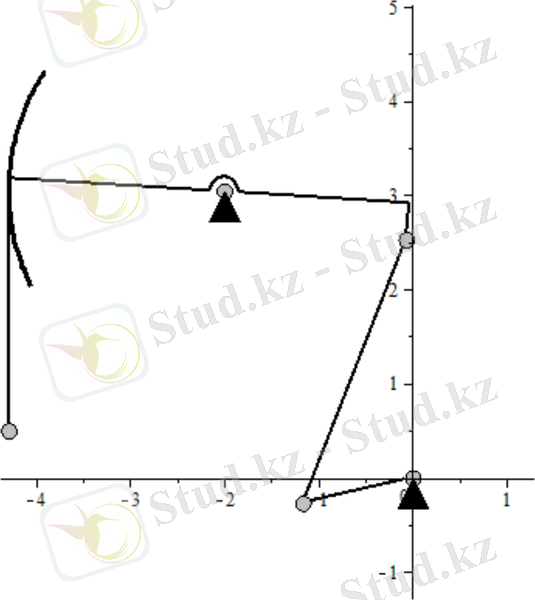
Сурет 5. ПШН-8-3-5500 тербелмелі станоктың рычагты механизмінің Maple 16 жүйесінде алынған қарапайым кинематикалық схемасы.
Негізгі техникалық мәліметтер:
- Приводтар түрлендіруші механизм схемасына тиімді таңдау жасауға негізделген зерттеу барысында құрастырылған;
- Басқару тетігі қамтамасыз етеді:Сыртқы құрылғыларды қосу; Қолмен және авторматты тәртіппен басқару; Приводтың теңгеруілуін тексеру; Шатундар үзілгенде, электрқозғалтқышқа артық жүктеме түскен кезде приводты өшіру; Электр энергиясымен қамтамсыз ету үзілісінен кейін қоректену кернеуінің қалпына келуі кезіндегі өзін өзі іске қосуы;
- Металконструкциясының арттырылған қатаңдық қоры жұмыс барысында дірілдің болмауын қамтамасыз етеді;
- Новиков ілінісі бар Ц2НШ типті редуктормен жабдықталған, ол мұнай өнеркәсібінде пайдалану барысында ұзақ мерзімді тәжірибеде тексерілген сенімділікке ие;
- Редукторға, балансир тірегіне және траверса тірегіне қызмет көрсету алаңы да жинаққа кіреді;
- Жеткізу жинағында алмалы-салмалы тегершіктер ескерілген, ол өз кезегінде ұңғыманың параметрлеріне сәйкес келетін сипаттамасы бар приводты таңдауға мүмкіндік береді;
- Майды рұқсатсыз құйып алудың алдын алу үшін арнайы болттар мен арнайы кілттер қарастырылған (жеткізу жинағында кіреді) ;
- Бір пакетпен жөнелту тиеу және түсіру жұмыстарын жеделдетуді қамтамасыз етеді;
- Приводтың негізгі буындары СК және СКД типтегі тербелмелі станоктармен өзара алмастырылады;
- Приводтар екі түрлі нұсқада дайындалады:Приводтың рамасында орнатылған редуктормен бірге; Приводтың астына биік іргетас қалайды; Ұзын бағанаға орналастырылған редуктормен бірге; Жер деңгейінде құйылған іргетасымен бірге.
Кесте 1.
Техникалық сипаттамасы:
0, 9; 1, 2; 1, 6;
2, 0; 2, 5
3. ӘДЕБИЕТТЕРГЕ ШОЛУ
Рычагты механизмдердің кинематикалық талдаудың есебінің мағынасы - орындар, бірінші және екінші беріліс функцияларын алдын ала берілген деп саналатын бастапқы (жетекші) буынның жалпыланған координатасына тәуелді функция түрінде көрсету. Казіргі уақытта бар әдістердің бәрін шартты түрде үшке бөлуге болады:
- Графикалық
- Графоаналитикалық
- Аналитикалық
Механизмдердің кинематикалық зерттеудің алғашқы түрлеріне графикалық және графоаналитикалық әдістерді жатқызамыз. Олар жеңіл, көрнекі және кез келген механизмді талдауға мүмкіндік береді, бірақ олар көп уақытты, жұмысты қажет етеді және олардың қателігі жоғары болады. Ал аналитикалық әдістердің есептеу көлемі жоғары.
Бірінші және екінші беріліс функциясын анықтау (рычагды механизмнің классына тәуелсіз) сызықты теңдеулер жүйесін шешуге алып келеді және қиындықты туғызбайды. Осындай теңдеулер жүйесінің шешу әдістерін кез келген математикалық анықтамалық әдебиеттерде табуға болады. Буындардың орнын анықтау есебі механизмнің классына тәуелді: бірінші және екінші классты механизмдер үшін бұл есеп жеңіл шығады, ал механизмнің классы жоғарлаған сайын есеп едәуір қиындай түседі.
Орындар есебін шығару әдістерінің бірнешеуін қарастырайық. Қолданысқа тығыз енген әдістердің бірі В. А. Зиновьевпен [2] ұсынылған тұйықталған векторлық контурлар әдісі. Әдіс - кинематикалық жүйені, шешімінің координаталық осьтерге проекциясы сызықты емес теңдеулер жүйесіне алып келетін бірнеше векторлық контурлар түрінде көрсетуде негізделген. Әдетте бұл сызықты емес теңдеулер жүйесін аналитикалық немесе сандық әдістермен шешуге болады. Н. И. Левитский [3] жұмыста ізделінетін бұрыштарды сандық әдістерді тек механизмнің бастапқы орындары үшін қолданған жөн деген, ал әрбір келесі орындар үшін бірінші жуықтау ретінде алдынғы орын үшін алынған, айқындалған бұрыштар мәнін қолдануды ұсынған.
Векторлы контурлар әдісі екінші классты және айналмалы-ілгерлемелі кинематикалық жұптардың әртүрлі тіркестілі үшінші және төртінші классты алтыбуынды механизмдерді талдауда жиі қолданылады. Э. Е. Пейсах [4] бастапқы сызықты емес теңдеулер жүйесін бір алгебралық теңдеуге алып келуді ұсынады. Осы әдісті төртбуынды Ассур топтарынан тұратын алтыбуынды-топсалы механизмдерге қолдануының мысалы [5] жұмыста көрсетілген. Бұл әдіс бойынша орындарды табу есебі алтыншы дәрежелі алгебралық теңдеудің нақты түбірлерін табуға алып келеді. Бұл әдіс бойынша кіріс буын бекітілген болған кездегі механизмнің құрылым варианттар санын анықтауға болады.
Ю. Ф. Морошкин [6] векторлы контурлардың тұйықтығының теңдеулерін құру үшін координаталады түрлендіру әдісін қолдануды ұсынды. Бұл әдіске сәйкес, механизмнің әрбір буыны үшін өзінің координаталар жүйесі бекітіліп, оларды түрлендірудің теңдеулері құрылады. Теңдеулер ЭВМ есептеуге ыңғайлы матрицалық формада болады, бір буында орналасқан және басқа буынмен байланысқан нүктелердің координаталарын табуға мүмкіндік береді.
“Инверсия” әдісі (немесе - “жетекші буынды ауыстыру” әдісі, “бастапқы буынды өзгерту” әдісі) [2] - Ассур топтарынан тұратын және қай буынды бастапқы етіп қабылдауына байланысты өзінің классын өзгерте алатын кейбір механизмдер қасиетінде негізделген. Кейбір механизмдер үшін, әдіс карапайымдырақ Ассур (буындар саны азырақ) топтары бар механизмдерді алуға мүмкіндік береді: мысалы, үшінші классты алтыбуынды механизмді екінші классты механизм ретінде қарастыруға болады. Бұл әдісті қолдану тек үшжіктемелі топты алтыбуынды механизммен байланысты.
И. И. Артоболевскиймен [13] құрылған “кинематикалық жүйені ажырату” (геометриялық орындай әдісі, жалған орындар әдісі) әдісі белгілі. Бұл әдіске сәйкес кинематикалық жүйедегі бір немесе бірнеше топсалар ажыратылады, соған сәйкес бір күрделі жүйенің орнына бірнеше қарапайым жүйелерді қарастыруға болады. Әрбір ажыратылған топса үшін оның мүмкін геометриялық орындары құрылады. Ажыратылған топсаладың нақты орны сәйкес геометриялық ажырату нүктелерінің орындарының қиылысы бойынша табылады.
В. В. Добровольскиймен [3] ұсынылған “буын салу” әдісі бойынша зерттелінетін киниматикалық жүйеден (механизм немесе Ассур тобы) қалған жүйе қарапайымдырақ құрылымды механизмдер қатарына ыдырағанша бір немесе бірнеше буындар алынып тасталады. Алынған механизмдер буындарына, алынған буынды қайта қоюға мүмкін болатын орындарын анықтай отырып қозғалыс беріледі.
У. А. Жолдасбековпен [8] ұсынылған “шартты жалпыланған координаталар” әдісі қызықтырады. Бұл әдіс “буын салу” әдісі мен матрицалы формалы “координаталарды түрлендіру” әдісін қолдану арқылы сандық-аналитикалық формасындағы “инверсия” әдісінің қосындысынан тұрады. Бұл әдіс кез келген классты Ассур тобын талдауға мүмкіндік береді, бұл әдістің көмегімен механизмнің құрылым варианттар саны туралы, кривошиптің болу шарты және т. б. есептерді шешуге болады.
Механизмдердің орындары туралы есепті шешу үшін О. Г. Озалдың [9] “үшбұрыштар” әдісін қолдануға болады. Бұл әдіс бойынша кез келген тұйықталған контурды үшбұрыштар (ұшбұрыштар өзгеретін немесе өзгермейтін де бола алады) арқылы өрнектеуге болады. Автор бұл әдіс арқылы құрылған теңдеулер жүйесін есептеу әдістері арқылы шешуді ұснады.
Әдетте жоғарыда көрсетілген әдістердің бәрі нақты классты механизмнің немесе құрылымдық топтардың талдау есебін шешу үшін арналған. Қазіргі уақытта толық қойылымды және кез келген құрылымды рычагты механизмнің кинематикалық талдау есебін шешуін орындайтын әдіс жоқ.
Кесте 2.
Рычагты механизмдердің кинематикалық талдауы мен синтезін орындайтын ПК программалары.
Жазық рычагты механизмдері синтездейтін жүйе. Келесі модульдерден тұрады:
- ANEK - кинематикалық талдау модулі;
- IBSE - механизмнің құрылымын енгізу модулі;
- GIKO - нәтижелерді графикалық түрде шығару модулі.
4. МЕХАНИЗМНІҢ КҰРЫЛЫМДЫҚ ТАЛДАУЫ
Құрылымдық зерттеудің есебі, профессор Л. В. Ассурмен ойлап табылып, кейіннен И. И. Артоболевскиймен жетілдірілген классификация негізінде механизмнің классын анықтау болып табылады. Оның негізгі идеясы бойынша, кез келген топсалы-рычагты механизм, жетекші буынға (немесе буындарға) еркіндік дәрежесі нөлге тең топтарды қосу арқылы құрастырылады делінген. Осыдан, механизм жетекші буыннан (немесе бірнеше буындардан) және Ассурдың атына қойылған еркіндігі нөлге тең топтардан тұрады дейміз. Механизмнің жетекші буындарының саны, Чебышев формуласы арқылы есептелетін еркіндік дәрежесі W арқылы табылады:

Сіз бұл жұмысты біздің қосымшамыз арқылы толығымен тегін көре аласыз.
- Іс жүргізу
- Автоматтандыру, Техника
- Алғашқы әскери дайындық
- Астрономия
- Ауыл шаруашылығы
- Банк ісі
- Бизнесті бағалау
- Биология
- Бухгалтерлік іс
- Валеология
- Ветеринария
- География
- Геология, Геофизика, Геодезия
- Дін
- Ет, сүт, шарап өнімдері
- Жалпы тарих
- Жер кадастрі, Жылжымайтын мүлік
- Журналистика
- Информатика
- Кеден ісі
- Маркетинг
- Математика, Геометрия
- Медицина
- Мемлекеттік басқару
- Менеджмент
- Мұнай, Газ
- Мұрағат ісі
- Мәдениеттану
- ОБЖ (Основы безопасности жизнедеятельности)
- Педагогика
- Полиграфия
- Психология
- Салық
- Саясаттану
- Сақтандыру
- Сертификаттау, стандарттау
- Социология, Демография
- Спорт
- Статистика
- Тілтану, Филология
- Тарихи тұлғалар
- Тау-кен ісі
- Транспорт
- Туризм
- Физика
- Философия
- Халықаралық қатынастар
- Химия
- Экология, Қоршаған ортаны қорғау
- Экономика
- Экономикалық география
- Электротехника
- Қазақстан тарихы
- Қаржы
- Құрылыс
- Құқық, Криминалистика
- Әдебиет
- Өнер, музыка
- Өнеркәсіп, Өндіріс
Қазақ тілінде жазылған рефераттар, курстық жұмыстар, дипломдық жұмыстар бойынша біздің қор #1 болып табылады.

Ақпарат
Қосымша
Email: info@stud.kz