Манипуляторлардың кинематикасы мен динамикасы және жетек пен басқару жүйелерін жобалау

Жұмыс түрі: Курстық жұмыс
Тегін: Антиплагиат
Көлемі: 30 бет
Таңдаулыға:
МАЗМҰНЫ
КІРІСПЕ 3 -4
I. МАНИПУЛЯТОРДЫҢ КИНЕМАТИКАСЫ 5 - 16
- Манипуляторлардың түрлері 5
- Кинематикалық есептерді жүргізу 6 - 9
(тура, кері есебі)
- Күш анализі. Әр буынға күш анализі 10 - 16
Қызмет ету зонасы
II. РОБОТТЫҢ ЖЕТЕГІН ЖОБАЛАУ 17 - 29
- Манипуляторлар жетектерінің жалпы сипаттамасы 14 - 15
- Таңдалған жетек түрі 16 - 21
- Жетекті басқару әдістері 22 - 25
- Жетектің қозғалыс теңдеуі 28
III. РТК-ны ЖОБАЛАУ 29
ҚОРЫТЫНДЫ 30
ҚОЛДАНЫЛҒАН ӘДЕБИЕТТЕР 31
КІРІСПЕ
Адамның тіршілік әрекетінің барлық салаларында мехатрондық объектілер, яғни қандай-да бір мөлшерде электрондық, электротехникалық және компьютерлік құраушылармен жабдықталған техника - қазіргі заманғы техникалық прогрестің ерекшелік белгісі болып табылады. Өндірісте компьютерлік және сандық программалы басқарылатын қазіргі заманғы станоктар, өнеркәсіптік роботтар және басқа да технологиялық жабдықтар осындай техникалардың мысалдары болып табылады. Үйде немесе кеңседе бейнемагнитофондар, принтерлер, ыдыс жуатын машиналар және құрастырылған микропроцессорлар мен микроэлектрониканың әр түрлі құралдарының салдарынан автоматты түрде жұмыс істеу мүмкіндігі бар басқа да техника қолданылады. Медицинада мехатрондық тәсілдердің негізінде «жасанды жүрек», «жасанды бүйректер», «жасанды аяқтар» және т. б. аппараттар жасалынды және кең түрде қолданылады.
Механика мен электрониканың қиылысындағы жаңа техникалық жетістіктердің бірі - роботтар болып табылады.
Роботтық техника - роботтарды жасауға арналған ғылыми негіз, ғылым мен техниканың жаңа саласы - мехатрониканың негізі болып табылады.
Мехатроника қозғалысы электроника құралдарының көмегімен баскарылатын және реттелінетін машиналар мен механикалық жүйелерді жасау мен пайдалануға арналған ғылым мен техниканың саласы.
Мехатроника пәнінің тәсілдері мен әдістері - механика, электроника, автоматика және ақпараттану пәндерінің негізінде жасалады.
Жалпы түрде мехатрондық объектілер мен жүйелерге механикалық, басқарылатын және ақпаратты-өлшеу жүйелері кіретінін роботтардың мысалынан көз жеткізуге болады.
Мехатрондық объектінің механикалық бөлігі өз кезегінде қозғалысты түрлендіруге арналған атқарушы қозғалтқыштар мен әртүрлі текті механизмдерді іске қосатын жетектердің жиынтығын құрайтын манипулятор мен атқарушы қондырғылар тәрізді тасымалдаушы жүйеден тұрады.
¥сынылып отырған оқу құралының мақсаты мехатрондық объектілердің механикалық бөлігін талдау және синтездеу барысында туындайтын, «Машиналар механикасы» немесе «Механизмдер мен машиналар теориясы» дәстүрлі курстарында қарастырылатын есептерге ұқсас механика есептерін, сол сияқты оларды шешу әдістерін мехатроникадан жүйеленген түрде бөле отырып мазмұндау болып табылады. Олардың ерекшеліктері төмендегілер болып табылады:
- модельдеудің әртүрлі әдістерін қолдану;
- әрі қарай алгоритмдеу мен компьютерлендіруге әдістерді қолдана отырып, есептерді шешу;
- зерттеу объектісі ретінде негізінен көп қозғалмалы жәнебасқарылатын кеңістіктік механизмдер болып табылады;
- жазық механизмдер механизмдердің мысалы ретінде қарастырылады.
I. МАНИПУЛЯТОРДЫҢ КИНЕМАТИКАСЫ
1. 1 Манипуляторлардың түрлері
Механизм деп механикалық қозғалысты беру және түрлендіруге арналған байланысқан денелер жүйесін атаймыз. Классикалы ұғым бойынша механизмдер кіріс буындары деп аталатын және механизмнің басқа денелеріне қозғалысты беретін шектелген денелер сатынан тұратын өзара байланысқан қатты денелер болып табылады. Механизмнің мысалы ретінде көптеген іштей қозғалтқыштарының ажыратылмайтын бөлігі болып табылатын привошины механизмді келтіруде болады.
Соңғы уақыттарда роботтардың және басқа да басқарылатын машиналардың пайда болуымен көп қозғалмалы басқарылатын механизмдер жеке класс болып бөлініп шықты. Көп қозғалмалы басқарылатын механизмдердің мысалы роботтардың атқарушы механизмдері - манипуляторлар болып табылады. Басқарылатын жетектің көмегімен жүйенің қозғалатын жүйелерінің әрқайсының орнының өзгертілуі осы механизмдердің ерекшелігі болып табылады.
Көптеген жағдайларда көп қозғалмалы басқаратын механизмдердің мысалы ретінде манипулятор қарастырылады. Функционалды қатынаста манипулятор да механизмдер болып табылады. Сондықтанда алдағы уақыттарда қарапайым механизмдер де, манипуляторда механизмдер ретінде қарастырылады.
Манипуляторлар жұмыс органының бос орын ауысу кезіндегі тұйықталмаған кинематикалық тізбекті кеңістікті механизм болып келеді, оның буындары жетекпен жабдықталған бесінші класты (айнымалы және ілгерілмелі) кинематикалық жұптармен байланысқан осындай әрбір жетекті кинематикалық жұп манипуляторға бір қозғалу дәрежесін қамтамасыздандырады. Қозғалыс дәрежесінің өзара орналасуы түрі және сол құрылғының моаипуляционды мүмкіндіктерін анықтайды.
Манипуляторлар манипурленетін объектіні ұстауға және ұстап тұруға арналған қорпығыш құрылғылармен жабдықталған. Қорпығыш құрылғыны манипулятордың жұмыс органы деп атайды. Ұстау және ұстап тұру оның бөліктерінің орын ауысуына қатысты орындалатын қорпыш құрылғыны ұстағыш деп атайды.
1. 2 Кинематикалық есептерді жүргізу
Көптеген манипуляторлар негізінен 5 стерженьді функциональды топтан тұрады. Әртүрлі НФТ-нің параллелді қосындысы тұйықталған кинематикалық тізбекті көпқозғалысты механизмнен тұрады.
НФТ - нің әр буынына байланысты тікбұрышты координат жүйесі бар. Арнайы әдіс бойынша координаттардың бағыты мен орны таңдалады. НФТ - нің үш буыннан тұратын біртекті түрленуі НФТ матрицасы деп аталады. НФТ матрицасы кинематикалық жұп матрицасы ретінде қаралады. Сондықтан әр НФТ-дан кинематикалық жұп матрицасын аламыз. Ол үшін кинематикалық жұптан түрлену параметрлері d i , θ i , γ i , a i , α i , ψ i , b i , β i анықталады. НФТ остері не параллелді не перпендикуляр орналасқан. Таблицада түрлендіру параметрлерінің мәні кинематикалық жұп таблицасында келтірілген. Таблицада жалпыланған координата мәндері суретке сәйкес алынған
1. 1 - сурет - НФТ - 2- тің сұлбасы
Таблицадағы параметрлерді әр НФТ -дағы кинематикалық жұптар үшін А i матрицасына сәйкес қойып келесі матрицаны аламыз.
НФТ - 2
 Equation. 3
Equation. 3
 (1. 1)
(1. 1)
НФТ - нің біртекті түрлендіру матрицасы
Т
i
(
i=1
 Equation. 3 5
) әр кинематикалық жұп матрицаларының көбейттіндісінің нәтижесінде аламыз:
Equation. 3 5
) әр кинематикалық жұп матрицаларының көбейттіндісінің нәтижесінде аламыз:
Т i =А 1 A 2 А 3 , (1. 2)
мұнда А 1, А 2, А 3 - i -ші НФТ- нің кинематикалық жұп матрицалары, олар 0-1, 1-2, 2-3, буандарына сәйкес алынады. НФТ біртекті түрлендіру матрицасы келесі:



 Equation. 2 (1. 3)
Equation. 2 (1. 3)
Базалық координат жүйесіне қатысты характеристикалық М нүктесінің орны соңғы буынның негізінен басталады, ол векторлық теңдікпен көрсетіледі.
r м =T i r 3 м , (1. 4)
r м = (x м, y м, z м, 1) Т - базалық координат жүйесіне қатысты М нүктесінің координатасының кеңейтілген векторы;
r 3 м =(x 3 м , y 3 м , z 3 м , 1) Т - 3 буынның О 3, Х 3, У 3, Z 3 координат жүйесіне қатысты М нүктесінің біртекті координат векторы .
Кесте 1. 1 - НФТ -4 үшін түрлену параметрлерінің кестесі
№
НФТ
0-1
1-2
2-3
Айнал.
Айнал.
Ілгер.
0
S 2
S 3
 1
1

0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
r 3 м векторы НФТ үшін келесі мәнді білдіреді: 3) r 3 м =(0 0 d 1) Т ; .
НТФ - 2 :
x
м=-S
 S
S
 ; y
м
=Cφ
1
S
3
; z
м
=d+S
2.
.
(1. 5)
; y
м
=Cφ
1
S
3
; z
м
=d+S
2.
.
(1. 5)
Манипуляторлар кинематикасының тура есебін шешу
Манипуляторлар кинематикасында орындар туралы тура есеп шешімі берілген жалпыланған координаталары және берілген геометриялық көрсеткіштері бойынша манипулятор негізімен байланысқан базалық координаталар жүйесіне қатысты жұмыстық органының бағдары және орнының анықталуымен сипатталатыны белгілі.
Кинематиканың тура есебін шешу нәтижесінде келесілерді анықтау мүмкін болады:
- манипулятордың қызмет ету аумағын және кейбір геометриялық, сапалы көрсеткіштерді, яғни сервис коэффициентін және т. б. ;
- орындар функциясын;
- кинематикалық қателіктерді;
- манипулятордың кинематикалық сипаттамаларын.
Кинематиканың кері есебі кинематиканың тура есебін шешуде алынған аналитикалық тәуелділіктерге негізделген.
Жоғарыда алынған механикалық жүйенің өзара байланысқан денелерінің математикалық бейне аппараты, сонымен қатар НФТ үшін алынған тәуелділіктер БККҚМ кинематикасының тура есебін шешу негізі болып келеді.
Соңғы буын негізінен базалық координаталар жүйесіне қатысты М сипаттамалы нүктесінің орны әрбір НФТ үшін (1. 5) -ге сәйкес жалпы түрдегі векторлық теңдікпен анықталынады:
r м =T i r 3 м , (1. 6)
мұндағы r м = (x м, y м, z м, 1) Т - базалық координаталар жүйесіне қатысты М нүктесінің біртекті координатасының кеңейтілген векторы;
r 3 м =(x 3 м , y 3 м , z 3 м , 1) Т - 3 буынымен байланысқан О 3, Х 3, У 3, Z 3 координаталар жүйесіне қатысты М нүктесінің біртекті координаталар жүйелерінен құралған вектор.
НФТ-ның соңғы буынының М сипаттамалық нүкте координаталары (x 3 м , y 3 м , z 3 м ) құрылмалық түсініктерден алынады. Біздің жағдайда олар НФТ-ның кинематикалық сұлбаларынан алынады (1. 1-сурет) .
Сонда
i
-ші НФТ (i=1
 5) үшін, r
3
м
векторы келесі мәндерге ие болады: r
3
м
= (d 0 0 1)
Т
; 2) r
3
м
=(0 d 0 1)
Т
; 3) r
3
м
=(0 0 d 1)
Т
; 4) r
3
м
=(L
3
0 0 1)
Т
; 5) r
3
м
=(L
3
0 0 1)
Т
.
5) үшін, r
3
м
векторы келесі мәндерге ие болады: r
3
м
= (d 0 0 1)
Т
; 2) r
3
м
=(0 d 0 1)
Т
; 3) r
3
м
=(0 0 d 1)
Т
; 4) r
3
м
=(L
3
0 0 1)
Т
; 5) r
3
м
=(L
3
0 0 1)
Т
.
НФТ біртекті түрлендіру матрица өрнегін (1. 6) формуласына қойып және НФТ-ға сәйкес r 3 м мәндерін қолданып, әрбір НФТ үшін базалық координаталар жүйесінен шығыс буынының М нүктесі координатасын аламыз:
НТФ -2:
x
м
=
S
 S
S
 ; y
м
= Cφ
1
S
3
; z
м
= d+S
2
.
(1. 7)
; y
м
= Cφ
1
S
3
; z
м
= d+S
2
.
(1. 7)
(1. 7) теңдігі НФТ-ның шығыс буынының нүкте координатасы мен жалпыланған координаталары арасындағы тәуелділікті білдіреді.
Алынған формулалар жалпыланған координатаның берілген шектеулі өзгерістері кезіндегі және әртүрлі құрылмалы көрсеткішті НФТ-дан құрастырылған манипулятор үшін қызмет ету аумағын анықтауға мүмкіндік береді. Сонымен қатар, алынған тәуелділіктер кері есепті шешу үшін бастапқы берілгендер болып табылады.
НФТ үшін орын туралы кері есебі
Орын туралы кинематиканың кері есебінде шығыс буынының орны белгілі кездегі манипулятордың жалпыланған координаталары анықталынады.
Тұйықталмаған кинематикалық тізбекті роботтың көпқозғалмалы механизмінде орын туралы кері есебі бір мәнді және анық түрде шешілмейді.
Керісінше, БККҚМ орын туралы тура және кері есептерді анық түрде шешуге мүмкіндік береді. Кейбір жағдайларда бір мәнді шешімдер шығады.
БККҚМ НФТ-дан құралатындықтан, мұнда орын туралы кері есеп шешімі НФТ-дан құралған базалық манипуляторларға бірінші болып қолдану қарастырылады. Содан кейін НФТ үшін табылған нәтижелер орын туралы кері есепті шешу кезінде БККҚМ үшін жалпы қолданылады.
Бұрын қарастырылған бес НФТ-дан құралған базалық манипуляторлар үшін тізбекті түрде кинематиканың кері есеп шешімін қарастырайық.
(1. 7) теңдігін түрлендіруден кейін НФТ-2 үшін төмендегі жалпыланған координаталар алынған:
 (1. 8)
(1. 8)
НФТ үшін алынған (1. 8) тәуелділігі НФТ-дан құралған үшқозғалмалы манипуляторлардың орын туралы кері есебін шешу үшін қолданады.
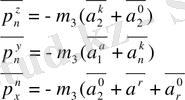
1. 3 Күш анализі. Әр буынға күш анализі
Динамикалық талдаудың міндеті және әдістері
Динамика - түсірілген күштердің әсерінен механизм буындары қозғалысының заңдылығын зерделейтін машиналар мен механизмдер механикасының бөлімі. Динамиканың негізінде Ньютон құрастырған үш заң бар. Жалпы қойылуда динамика - уақыт функциясындағы процесстер мен құбылыстарды оқып-үйретеді. Динамикада шешілетін есептерді тура және кері есептер деп шешу қабылданған. Динамиканың тура есебі - берілген басқарылатын күш әсерлері кезінде жүйенің және оны құрайтын буындардың қозғалыс заңын анықтау болып табылады. Динамиканың кері есебі - жүйенің берілген қозғалыс заңын қамтамасыз ететін талап етілетін басқарылатын күш әсерлерін болдыру болып табылады. Динамика есептерін шешу әдістерін 2 топқа бөлуге болады: энергетикалық және кинетостатикалық. Энергетикалық әдістер энергияның сақталу заңына - энергетикалық тепе-теңдік теңдеулеріне негізделеді. Кинетостатикалық әдістер күш инерциясын есепке ала отырып, Д’Аламбер қағидасы бойынша тепе-теңдік теңдеулеріне негізделген.
Әсер ететін күштер және олардың сипаттамалары
Механизмге әсер ететін күштер сыртқы жэне ішкі деп шартты түрде бөлінеді. Сыртқы күштер зерттелетін жүйеге сырттан әсер етеді. Осы күштер өз кезегінде:
- жұмыс оң болып табылатын (мысалы, жалпыланған күштер немесежетектермен дамитын күштер, бұл күштер жүйенің энергиясынеселейді) қозғалатын күштерге;
- жұмыс теріс болып табылатын кедергі (жүйенің энергиясын кемітеді) күштерге. Мұндай күштерге кедергі күштер, үйкеліс күштер жатады.
- потенциалдық, электромагниттік, электростатикалық және басқа даөрістермен өзара әсерлесулерге жіктеледі.
Механикалық жүйенің буындары арасында әсер ететін күштер ішкі күштер деп аталады. Есептеулер кезінде осы күштер кинематикалық жұптардағы реакция күштері ретінде анықталынады.
Кинетостатикалық әдіс кезінде қозғалмалы механикалық жүйелердің күш есебі үшін Д'Аламбер ұсынған қосымша инерция күштері енгізіледі. Осы күштерді жүйеге әсер ететін сыртқы күштерге қосқан кезде жүйенің квазистатикалық тепе-теңдігі болады және оны статиканың (кинетостатиканың әдісі) теңдеулерін қолдана отырып есептеуге болады.
Кеңістіктік механизмдердің (үйкелісті есептемегендегі) кинематикалық жұптарындағы күштерге тереңірек тоқталайық. Күш векторлық шама ретінде
үш көрсеткіштермен сипатталатыны белгілі: нүкте координатасымен, шамасымен және бағытымен. Жазық механизмдердің кинематикалық жұптарындағы реакцияларды қарастырайық. Ілгерілемелі кинематикалық жұпта (сурет) буын 2 буын 1-мен салыстырғанда V 21 салыстырмалы жылдамдықпен қозғалады. Буын 1 буындардың салыстырмалы қозғалысына байланыстар салады жэне X, Ү осьтері бойынша 2 ілгерілемелі қозғалысты және СХ, СҮ, СZ осьтерін айнала 3 салыстырмалы айналуларды тоқтатады. Байланысты (буын 1) реакциялармен ауыстыру арқылы 1-нші буыннан 2-нші буынға жасалған өзгертулер арқылы СХ, СҮ осьтері бойынша бағытталған реакция күштерін аламыз және СХ, СҮ, СZ осьтеріне қатысты реакция күштері жұптарының моменттерді (реактивтік моменттер) М 12 , М 12 , М 12 аламыз. Егер КЖ жетекті болатын болса, онда СZ осьі бойынша құрайтын күш R 12 - ілгерілемелі қозғалыстың жетегі есебінен болатын жалпыланған сыртқы күш болып табылады (б суретте реакция күштері ғана көрсетілген) .
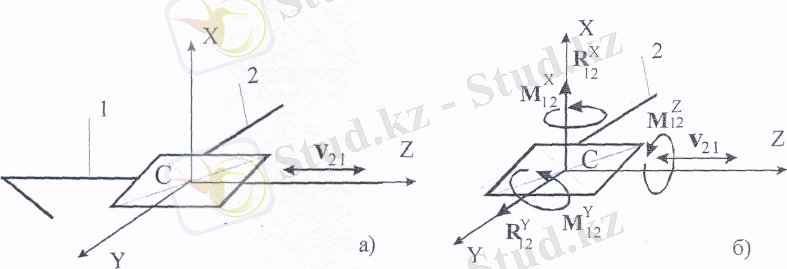
1. 2 - сурет - Ілгерілемелі кинематикалық жұптардағы күштер.
Ілгерілемелі кинематикалық жұптардағы күштерді есептеген кезде төмендегі шамалар анықталады:
- М12, М12, М12реактивтік моменттерді;
- R12R12реакция күштерін;
- R12жетек күші немесе жалпыланған күш (жетекті КЖ үшін) . Күштерді салу нүктесі ретінде КЖ ортасындағы шартты нүктелер
қабылданады. Айналмалы КЖ-дағы (сурет) дене 2 С Z осьіне қатысты айналыс жасайды. Буын 1 буынның 2 салыстырмалы қозғалысына СХ, СҮ, СZ осьтері бойымен үш салыстырмалы ілгерілемелі қозғалысты тоқтататын және СХ, СҮ осьтерін айнала екі айналмалы бес байланыс салады.
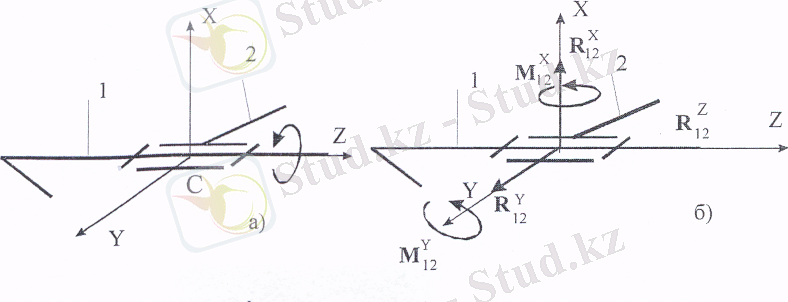
1. 3 - сурет - Айналмалы кинематикалық жұптардағы күштер.
Осы байланыстарды күштермен алмастыра отырып, R 12 R 12 R 12 реакция күштерін жэне реакция күштері жұптарының моменттерін М 12 , М 12 аламыз. Егер КЖ жетекті болса, онда күштер жұптары моменті М 12 жетек жақтан қосылған сыртқы күш болып табылады.
Айналмалы кинематикалық жұптардағы күштерді есептеген кезде төмендегі шамалар анықталады:
- R12R12R12реакция күштері;
- М12, М12реакция күштері жүптарының моменттері;
- жетекпен дамитын жалпыланған күш-моментМ12(жетекті КЖ үшін) .
Динамикалық модельді - келтіру буынын құру
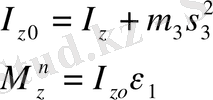
Машиналар механикасы динамикасының тура есебін төмендегідей қалыптастырылғаны белгілі: басқарылатын күштер және сыртқы кедергі күштері берілген, осылармен қамтамасыз етілетін машинаның қозғалыс заңын анықтау қажет. Күрделі механикалық жүйе үшін осы есептің шешілуі үлкен есептеулер жүргізуді жиі қажет етеді. Бірақ, шешімдерді қысқарту үшін егер, келтіру әдісін қолдансақ, онда күрделі жүйені қарапайым динамикалық модельмен ауыстыруға болады. Мұндай жағдайда механикалық жүйе келтіру буынымен алмастырылады. Әрі қарай бір қозғалу дәрежесі бар жүйе үшін динамикалық модельді құруды қарастырамыз. Мұндай жағдайда келтіру буынының орны бастапқы механикалық жүйенің бір ғана жалпыланған координатасымен анықталады. Осы кезде ілгерілемелі қозғалыс жасайтын келтіру буынының инерциялық көрсеткіші - келтірілген масса, ал күштік көрсеткіші - келтірілген күш болып табылады. Егер келтіру буыны айналмалы қозғалыс жасайтын болса, онда инерциялық көрсеткіш - келтірілген инерция моменті, ал күштік көрсеткіші - күш жұптарының келтірілген моменті болып табылады. Динамикалық модельдің осы көрсеткіштері модель және объект үшін кинетикалық энергияны өзгерту теңдеулерінің оң және сол жақ бөліктерінің теңдіктеріне сәйкес анықталатын модель мен объектінің ұқсастығы критерийлері бойынша есептелінеді.
Механикалық жүйе үшін кинетикалық энергияны өзгерту теоремасына
сәйкес жүйеге әсер ететін барлық сыртқы күштердің жұмысы тек қана
жүйенің кинетикалык энергиясының өзгеруіне жұмсалады. Осы кезде
потенциалдық күштер - салмақ күштері сыртқы күштер ретінде қарастырылады, яғни
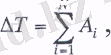

мұндағы ΔТ - жүйенің кинетикалық энергиясының өзгеруі,
(1. 9)
жүйеге әсер ететін барлық N - сыртқы күштердің суммалық жұмысы.
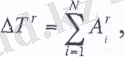
Механикалық жүйенің - келтіру буынының динамикалық моделінің теңдеуі төмендегі түрде де жазылуы мүмкін
(1. 10)
мұндағы ΔТ' - келтіру буынының кинетикалық энергиясының өзгеруі;
- келтірілген күштер мен моменттердің суммалық жұмысы.
Келтіру буынының қозғалыс заңы жалпыланған модельдің өзгеру

(1. 11)
адекватты болу қажеттігі модель мен объектінің ұқсастық критериі болып табылады.
Егер (1. 10) теңдігінің сол және оң жақтары (1. 11) теңдігінің сол және оң жақтарына тең болған жағдайда ғана осындай болуы мүмкін. Осыдан келтірілген инерциялық көрсеткіштерді және келтірілген күш факторларын есептеуге шарттар келіп шығады. Әрі қарай W=1 механикалық жүйенің жалпыланған координаталары бұрыштық шамалар болып табылады деп жорамалдаймыз. Егер жалпыланған координаталар сызықтық шамалар болып табылған кезде де осындай ұқсас нәтижелерді алуға болады. (1. 10) және (1. 11) теңдіктерінің сол жақтарынан келтіру буынының кинетикалық энергиясы бастапқы механикалық жүйенің кинетикалық энергиясына тең болатындығы шығады, бұл дегеніміз - келтіру буынының инерция моментін анықтауға арналған шарт болып табылады. (1. 10) және (1. 11) теңдіктерінің оң жақтарынан келтіру буынына салынған келтірілген моменттің жұмысы механикалық жүйеге салынған барлық күштердің жұмысының суммасына тең болатындығы шығады, бұл дегеніміз - келтірілген моментті есептеу үшін шарт болып табылады. Келтірілген күш немесе келтірілген момент жалпыланған күш ретінде анықталатынын байқауға болады.

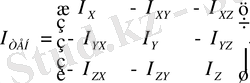
 Equation. 3 осьтік инерция моменті
Equation. 3 осьтік инерция моменті
 -х, у осьтеріне қатысты орта тепкіш моменті
-х, у осьтеріне қатысты орта тепкіш моменті


Инерция күштері әрқашан үдеулерге бағытталған


Нютонның 3-ші заңы боиынша


II РОБОТТЫҢ ЖЕТЕГІН ЖОБАЛАУ
2. 1 Манипуляторлар жетектерінің жалпы сипаттамасы
Жетектердің функциональды құрылымды сұлбасы 1-ші суретте берілген: мұндаға белгілеулер: 1-
 (t) үйлесімсіздік сигналын басқару каналына ыңғайлы етіп түрлендіретін элементтері; 2-қуат күшейткіштері; 3-күшті атқарушы элементтер; 4-тұрғылықты кері байланысты түзетуші буындар; 5-жетектің қозғалысын атқарушы механизмдерге жіберетін кинематикалық тізбелері; 6-орналасу дөңгелектері немесе (t) -ді Х(t) -ге түрлендіретін элементтер; ИМ-манипулятордың атқарушы механизмдері бұл басқару объектісі болып келеді; МТ-үйкеліс муфтасы.
(t) үйлесімсіздік сигналын басқару каналына ыңғайлы етіп түрлендіретін элементтері; 2-қуат күшейткіштері; 3-күшті атқарушы элементтер; 4-тұрғылықты кері байланысты түзетуші буындар; 5-жетектің қозғалысын атқарушы механизмдерге жіберетін кинематикалық тізбелері; 6-орналасу дөңгелектері немесе (t) -ді Х(t) -ге түрлендіретін элементтер; ИМ-манипулятордың атқарушы механизмдері бұл басқару объектісі болып келеді; МТ-үйкеліс муфтасы.
Жетекке берілген φ 3 (t) және жетекпен қайта осьтелген φ(t) қозғалысы дөңгелектер в көмегімен Х 3 (t) және X(t) басқару сигналына түрлендірілген, салыстыру блогында орындалады, ал (t) = Х 3 (t) - X(t) үйлесімсіздігі күшті атқарушы элементі 3 үшін басқару сигналды ретінде қолданылады, кейбір жағдайларда жетектің сапасын арттыру үшін басқару заңына 7 элемент арқылы келіп түсетін қоздырушы Х в (t) бойынша қосымша сигнал енгізіледі. Х 3 (t) сигналы ЭЕМ және программалы басқару құрылғысы көмегімен қалыптасуы мүмкін. Одан күрделі жүйелер құрамына кіретін жетектер 2-ші суретте көрсетілгендей бейнеленеді.
Жеке элементтер арасындағы байланыс каналдары бойынша берілетін сигналдар сипатына байланысты жетектер бірнеше класстарға бөлінеді:
1. үздіксіз (амплитудалы немесе фазылы) мұнда жүйелердің барлық элементтерінің шығысындағы және кірісіндегі сигналдары уақыт функциясында үзіліссіз болып келеді.
2. модульдендірілген мұнда қайсыбір элементтің шығысында сигнал өзгереді.
3. уақыт бойынша квантталған немесе деңгей бойынша квантталған импульсты, мұнда сигналдар деңгей бойынша уақыт бойынша квантталған әртүрлі жиілікті импульстер тібегі түрінде байқалады.
4. кодталған мұнда басқару сигналдары уақыт деңгей бойынша квантталады.
Программалы басқарулы жетектер көптеген жағдайларда фазалы жүйеде болады.
Манипуляторлардың жетектеріне берілетін техникалық талаптары көптүрлі. Сонымен жетектерге қойылатын негізгі талаптар:
1. берілген шартта сенімді жұмыс істеу
2. манипулятордың берілген өнімділігін және жүк көтерімділігін қамтамасыздандыру
3. бақылаудың берілген дәлдігін сақтау, бұл Адам көмегінсіз берілген програмамен жұмыс істейтін роботтарға маңызды
4. манипулятордың берілген тез әрекеттігін қамтамасыздандыру.
5. тербелісті және вибрацияны болдыртпай қозғалыстың бір қалыптылығына шыдамдығы.
6. жүрістің қажетті жеңілдігін қамтамасыздандыру, біл әсіресе Адам -оператор басқаратын манипулятор үшін қажет.
2. 2 Таңдалған жетек түрі
... жалғасыСіз бұл жұмысты біздің қосымшамыз арқылы толығымен тегін көре аласыз.
- Іс жүргізу
- Автоматтандыру, Техника
- Алғашқы әскери дайындық
- Астрономия
- Ауыл шаруашылығы
- Банк ісі
- Бизнесті бағалау
- Биология
- Бухгалтерлік іс
- Валеология
- Ветеринария
- География
- Геология, Геофизика, Геодезия
- Дін
- Ет, сүт, шарап өнімдері
- Жалпы тарих
- Жер кадастрі, Жылжымайтын мүлік
- Журналистика
- Информатика
- Кеден ісі
- Маркетинг
- Математика, Геометрия
- Медицина
- Мемлекеттік басқару
- Менеджмент
- Мұнай, Газ
- Мұрағат ісі
- Мәдениеттану
- ОБЖ (Основы безопасности жизнедеятельности)
- Педагогика
- Полиграфия
- Психология
- Салық
- Саясаттану
- Сақтандыру
- Сертификаттау, стандарттау
- Социология, Демография
- Спорт
- Статистика
- Тілтану, Филология
- Тарихи тұлғалар
- Тау-кен ісі
- Транспорт
- Туризм
- Физика
- Философия
- Халықаралық қатынастар
- Химия
- Экология, Қоршаған ортаны қорғау
- Экономика
- Экономикалық география
- Электротехника
- Қазақстан тарихы
- Қаржы
- Құрылыс
- Құқық, Криминалистика
- Әдебиет
- Өнер, музыка
- Өнеркәсіп, Өндіріс
Қазақ тілінде жазылған рефераттар, курстық жұмыстар, дипломдық жұмыстар бойынша біздің қор #1 болып табылады.

Ақпарат
Қосымша
Email: info@stud.kz