Авиацияда ГЛОНАСС пен NAVSTAR (GPS) сигналдарын қолданудың мүмкіндіктерін талдау

Жұмыс түрі: Дипломдық жұмыс
Тегін: Антиплагиат
Көлемі: 60 бет
Таңдаулыға:
Қазақстан Республикасының білім және ғылым министрлігі
Әл-Фараби атындағы Қазақ ұлттық университеті
Пәтхан М.
Авиацияда серіктік навигациялық жүйелердің сигналдарының мүмкіндіктерінің қолданулуын талдау
ДИПЛОМДЫҚ ЖҰМЫС
мамандығы: 5B071900-Радиотехника, электроника
Алматы, 2015
ҚАЗАҚСТАН РЕСПУБЛИКАСЫНЫҢ БІЛІМ ЖӘНЕ ҒЫЛЫМ МИНИСТРЛІГІ
ӘЛ-ФАРАБИ АТЫНДАҒЫ ҚАЗАҚ ҰЛТТЫҚ УНИВЕРСИТЕТІ
Қорғауға жіберілді
Қатты дене физикасы және бейсызық физика
кафедрасыың меңгерушісі,
профессор
Бөлегенова С. А.
ДИПЛОМДЫҚ ЖҰМЫС
Тақырыбы: «Авиацияда серіктік навигациялық жүйелердің сигналдарының мүмкіндіктерінің қолданулуын талдау»
мамандығы: «5B071900-Радиотехника, электроника »
Орындаған:
4 курс студенті Пәтхан М. (қолы, күні)
Ғылыми жетекшісі,
ф. -м. ғ. д., профессорКадыракунов К. Б.
(қолы, күні)
Норма бақылаушыТолегенова А. А.
(қолы, күні)
Алматы, 2015
Реферат
Дипломдық жұмыс 47 беттен, 10 кестеден, 17 суреттен және 20 қолданылған әдебиеттер тізімінен тұрады.
Термин сөздер: ГЛОНАСС, GPS, NAVSTAR, спутник
Дипломның зерттеу обьектісі: ГЛОНАСС және Навстар
Жұмыстың мақсаты: СРНС «ГЛОНАСС» және «Навстар» ға анализ жасау. Ол жүйелердің сигналдарын анықтау.
Зерттеу әдісі: қарастыру, зерттеу, талдау, график тұрғызу.
Реферат
Дипломная работа состоит из 47 страниц, 10 таблиц, 17 рисунков и 20 использованных литератур.
Термины и слова: ГЛОНАСС, GPS, NAVSTAR, спутник
Исследовательный объект диплома: ГЛОНАСС и Навстар
Цель диплома: исследовать СРНС «ГЛОНАСС» и «Навстар» и их сигналы.
Метод исследование: анализ, исследование, обсуждение, сравнение и построение графика.
Abstract
The thesis consists of 47 pages, 10 tables, 17 drawings and 20 used literatures.
Word term: GLONASS, GPS, NAVSTAR, sputnik
Issledovatelny object of the diploma: GLONASS and Navstar
Diploma purpose: to investigate SRNS "GLONASS" and "Navstar" and their signals.
Method research: The analysis to investigate, will discuss, to compare and the schedule to construct.
Белгілеулер мен қысқартулар
AS - Anti Spoofing
C/A - Coarse Acqusition
GPS - Global Position System
NAVSTAR - NAVigation Satellite Time and Range
P-code - Protected
SA - Selective Avilability
БХВ - Бортовой Хранитель Времени
ВЭЧ - Вторичный эталон чистоты
ГЛОНАСС - Глобальная Навигационная Спутниковая Система
СРНС - Спутниковая Радионавигационная система
СЕВ - Система Единого Времени
СКШВ - Спутниковая Космическая Шкала Времени
СИ - Служебная Информация
НС - Навигациондық Спутник
НАП - Навигационная Аппаратура Потребителя
НИСЗ - Навигационный Искусственный Спутник Земли
НКУ - Наземный Комплекс Управление
НХВ - Наземный Хранитель Времени
ПКА - Подсистема Космических аппаратов
ПКУ - Подсистема Контроля и Управления
ПЭЧ - Первичный Эталон Чистоты
КА - Космостық Аппарат
КИК - Космический Измерительный Комплекс
КЛА - Космический Летательный Аппарат
ҚА - Қолданушы Аппаратурасы
РИС - Радиооборудование Искусственного Спутника
УШ - Уақыт Шкаласы
ЦУ- Центр Управление
ХВ - Хранители Времени
Мазмұны
КІРІСПЕ . . .
1. ЖЕРСЕРІКТІК НАВИГАЦИЯ ЖҮЙЕЛЕРІ. .
1. 1. ЖНЖ-дің қысқаша тарихы
1. 2. ЖНЖ-дің қазіргі навигацияда алатын орны.
1. 3. Тұтынушылардың Жерсеріктік радионавигациялық жүйелерге талаптары. .
1. 3. 1. Әуе кемелерін навигациялық қамтамасыздандыруға қойылатын талаптар.
1. 4. ЖНЖ-дің авиацияда қолданылуы. .
2. ЖНЖ ЖҰМЫСЫНЫҢ ЖАЛПЫ ҚАҒЫЙДАСЫ
2. 1. Координаталарды анықтаудың жалғанқашықтық әдісі
2. 2. Nаvstаr GPS сипаттамасы.
2. 3. ГЛОНАСС сипаттамасы. .
2. 4. ЖНЖ-дің дәлдігіне әсер ететін факторлар
2. 5. Қабылдағыштардағы алгоритмдер
3. ФУНКЦИОНАЛДЫҚ ТОЛЫҚТАУЫШТАР
3. 1. Борттық ЖНЖ жабдықтардың сипаттамалары.
3. 2. Борттық ЖНЖ жабдықтарда информацияның бейнеленуі
3. 3. Борттық ЖНЖ жабдығының негізгі режимдері мен функциялары.
3. 4. ЖНЖ-ді ұшуды дайындау және орындау кезінде қолдану. .
3. 4. 1. ЖНЖ индикатор-қабылдағышының ұшуға дайындығының жалпы ережелері
3. 4. 2. ЖНЖ индикатор-қабылдағышының ұшу кезінде қолдану. .
ҚОЛДАНЫЛҒАН ӘДЕБИЕТ ТІЗІМІ. .
КІРІСПЕ
Жерсеріктік навигациялық жүйелер (ЖНЖ) ГЛОНАСС және GPS өздерінің жерүсті және ғарыштық толықтауыштарымен адамдардың іс-шараларының әртүрлі аяларына белсенді түрде кірісуде.
Бұл жүйелер әуе, ғарыштық, теңіздік және жерүсті қозғалмалы құралдарының координаталарын, жылдамдығын және уақытын анықтауда жоғары дәлдіктегі сипаттамаларын көрсетті. Олар тасымалды құралдардың қозғалысының қауіпсіздігінің жоғарылауын, апатқа душар болғандарды іздестіріп, оларға көмек көрсетілуін, кеңістікте таралған объекттердің біріктірілуін қамтамасыз етуі мүмкін.
«Әуе-жер» деректерін беру жүйелерімен бірге ЖНЖ әуе кеңістігінің кез- келген ауданында автоматты тәуелді бақылау (АDS) жүргізуге мүмкіндік береді. ЖНЖ енгізу және болашақта жерүсті навигациялық құралдарын қолданыстан алып тастау әуе тасымалының ұшуының бірқалыптылығын, әсерлілігін, үнемділігін және қауіпсіздігін арттырады.
ЖНЖ сигналдарын әуе кемелерінің навигациясының дәлдігі мен беріктілігін арттыру мақсатында қолданудан тыс мемлекеттердің әуе өозғалысының шығындары азаяды. Жерсеріктік жүйенің техникалық және экономикалық артықшылықтарын ескеріп, ХААҰ (Халықаралық азаматтық авиация ұйымы) бүкіләлемдік Жерсеріктік байланыс, навигация, бақылау және әуе қозғалысын ұйымдастыру жүйесін - GPS пен ГЛОНАСС негізінде жұмыс істейтін және GNSS (Globаl Nаvigаtion Sаtellite System) глобалды навигациялық Жерсеріктік жүйесін қолданумен CNS/АTM (Communicаtion Nаvigаtionаnd Surveillаnce/АirTrаffic Mаnаgement) құру жайлы шешім қабылдады. Арнайы құрылған ХААҰ комитетімен болашақ аэронавигациялық CNS/АTM жүйелерінің концепциясы жасалды. Жасалатын өзгерістер масштабы бойынша CNS/АTM жүйелеріне көшу авиациялық ұйымдарға шешу керек болған ең ірі программа болып табылады.
Бұл дипломдық жұмыстың мақсаты - ЖНЖ сигналдарын авиацияда қолдану мүмкіндіктерін зерттеу.
1. ЖЕРСЕРІКТІК НАВИГАЦИЯ ЖҮЙЕЛЕРІ
1. 1. ЖНЖ-ның қысқаша тарихы
Бұл жүйенің жұмыс істеу қағыйдасы Допллер эффектісінде негізделген. Қазір істеп тұрған ЖНЖ-ларда бұл қағыйда негізгі емес, бірақ біршама қолданылады. Оның тек тарихи құндылығы ғана бар деп айта алмаймыз, сондықтан оны тереңірек зерттейік.
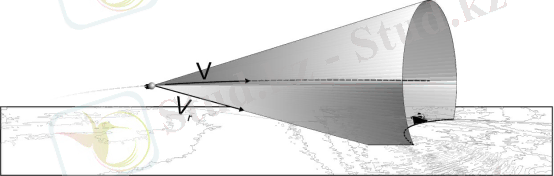
Сурет 1. Допллерлық ЖНЖ көмегімен жату түзулерін анықтау
Теңіз кемесінде орнатылған қабылдағыш ұшып бара жатқан Жерсеріктен радиосигналдар қабылдайды. Жерсеріктің сәулелену жиілігі және оның орналасқан жері белгілі. Бірақ Жерсерік кемеге қатысты қозғалады, сондықтан, Допллер эффектісіне сәйкес, қабылданатын сигнал жиілігі шығарылатын сигнал жиілігінен өзгеше болады. Бұл жиіліктердің айырмашылығы тек кез келген уақыт аралығында дәл есептеліне алатын Жерсеріктің жылдамдығынан ғана емес, сонымен қатар Жерсеріктің жылдамдық векторы мен Жерсеріктен теңіз кемесіне бағыт арасындағы бұрыштан да тәуелді. Яғни, допллерлік ауысым толық жылдамдық ИСЗ өзін емес, оның Жерсеріктен кемеге бағытына проекциясын тудырады ( Vr радиал жылдамдық) .
Кеңістікте радиал жылдамдықтың бір шамасы осі бойынша Жерсеріктың жылдамдық векторы бағытталған конустың барлық нүктелерінде орын алады. Сондықтан радиал жылдамдықтың әрбір шамасына (демек доплерлік ауысымның да) құйма бұрышы бар өзінің конусы сәйкес келеді. Кемедегі доплер ауысымын өлшеп кеменің қай конуста орналасқанын анықтауға болады. Берілген конус кеңістіктің беттік жатысы болып табылады. Бұл бет Жер бетін (дәлірек - теңіз беті, себебі теңіз кемелерін қарастырып жатырмыз) бір нүктесінде кеме орналасқан белгілі бір жатыс түзуінде кесіп өтеді. Осыған ұқсас басқа Жерсеріктің көмегімен екінші жатыс түзуін анықтап кеме орнын табуға болады.
Қазіргі уақытта ЖНЖ кең тараған, оны жиі GPS деп атайды, дегенмен басқа да (Жерсеріктік болуы міндетті емес) орналасу жерлерін анықтаудың глобалды жүйелері бар.
Nаvstаr GPS жүйесінің бірінші тесттік жерсерігі орбитаға 1975 жылдың 14 шілдесінде шығарылған, ал 24 Жерсеріктен тұратын толық топтың құрылуы 1993 жылы аяқталды. Осыған ұқсас ЖНЖ Кеңес Одағында да құрылған. ГЛОНАСС жүйесінің алғашқы спутнигі 1982 жылдың 12 қазанда ұшырылды, бірақ ол тек 12 Жерсеріктен құралды. Тек 1995 жылы ғана 24 Жерсерікпен жабдықталып бітті. 2011 жылдың қаңтарында орбитада 26 Жерсерік болды.
Осылайша, қазіргі уақытта әлемде екі глобалды ЖНЖ жұмыс істейді - американдық GPS және ресейлік ГЛОНАСС. GPS пен ГЛОНАСС жұмыс істеу қағыйдасы бойынша бірдей болғандықтан Ресей мен АҚШ арасында екі жүйеден де сигнал қабылдай алатын ЖНЖ қабылдағыштарын шығару жайлы келісім жасалды.
1. 2. ЖНЖ-ның қазіргі навигацияда алатын орны
ЖНЖ дәстүрлі радиотехникалық жүйелерге (РТЖ) қарағанда біршама басым қасиеттерге ие:
- Координаталарды анықтаудағы жоғары дәлділік;
- Жерсеріктердің жоғары биіктіктерде ұшуы Жерсерікте сияқты ұшақта да қарапайым антенналық құрылғыларды пайдаланып глобалды, яғни бүкіл жер шарын қамтитын, іс-шара ауданын құруға мүмкіндік береді;
- Жерсеріктің оның радиотехникалық құралдарының іс-шара ауданының кез келген нүктесіндетура көрініс шектерінде табылуы кедергілерге қарсы тұратын радиотолқындардың диапазондарын қолдануға және ең аз бұрмалаумен сигналдарды жіберуге мүмкіндік береді;
- Таратқыштың және сигналдарды өңдеудің қазіргі технологиялардың жоқтығымен шартталған ұшақтағы ЖНЖ құралдарының салыстырмалы қарапайымдылығы мен арзандылығы қамтамасыздандырылады;
ЖНЖ-ның осы айтылған қасиеттері әуелік қозғалысты қамтамасыздандырудың біршама мәселелерін шешуді жеңілдетуге көмектеседі. Олардың ішіндегі ең маңыздылары:
- Ұшулардың қауіпсіздік деңгейін арттыру;
- Навигацияның дәлдігін арттыру, әсіресе жерүсті құралдарының навигациялық РТЖ-тың әлсіз дамыған құрылымдары бар аудандарда және су кеңістіктерінде;
- ұшақты топтастыру интервалдарын азайту және әуе кеңістігінің өткізгіштік қасиеттерін арттыру;
- Әуе жолларын түзету.
Азаматтық авиация тәжірибесіне Жерсеріктік навигациялық жүйелердің енгізілуі революциялық жағдай болды. Координаталарды анықтаудың дәлдігі ондаған және жүздеген еселеп артты, ұшақтың орналасқан жерін әлемнің кез келген нүктесінен анықтау мүмкін болды. ЖНЖ ХААҰ енгізетін глобалды -масштабтағы байланыс, навигация, бақылау және әуе қозғалысын ұйымдастыру жүйесі - CNS/АTM(Communicаtion, Nаvigаtion аnd Surveillаnce /Аir Trаffic Mаnаgement) маңызды бөлігі. Жасалатын өзгерістер масштабы бойынша CNS/АTM жүйелеріне көшу авиациялық ұйымдарға шешу керек болған ең ірі программа болып табылады.
GNSS мұхиттық аудандарды, әуежайлардың аудандарын және бағыттарында, және ұшудың барлық кезеңдерінде, жер шарының барлық аудандарында навигациялық қызмет көрсетуді қамтамасыз етеді. ХААҰ GNSS-ты енгізу мемлекеттерге толықтай немесе бөлшектеп қазіргі жерүсті навигациялық құралдар (радиомаяктар, отырғызу жүйелері) жүйесін құртуға көмегін тигізеді деп ойлайды. GNSS-ты CNS/АTM шектерінде пайдалану оның нені қамтамасыз ететінімен шартталған:
- Глобалды негізде жоғарытұтас, жоғарыберік, барлық ауа райында істейтін навигациялық қызмет көрсету;
- Төртөлшемді навигация кезіндегі орналасу орнын анықтаудағы жоғары дәлдік;
- Жерүсті навигациялық құралдарды істен шығару арқылы үнемдеу;
- ВПП және әуежайларды эффективті пайдалану;
- Қону мүмкіндіктерін жақсарту;
- Ұшқышқа түсірілетін жүктемені азайту мүмкіндігі;
- икемді бағыттар арқылы қоршаған ортаға әсер етуді азайту мүмкіндігі.
Қазіргі уақытта навигацияның сапасына шарттар PBN (Performаnce Bаsed Nаvigаtion - сипаттамаларда негізделген навигациялар) концепциясының негізінде қойылады. Осы концепцияның шектерінде әртүрлі құралдардың қолданысы қарастырылады, бірақ негізгі ретінде - ЖНЖ, себебі тек олар ұшудың кейбір кезеңдерінде қажет дәлдікті қамтамасыз етуі мүмкін. «Әуе-жер» деректерін беру жүйелерімен бірге ЖНЖ әуе кеңістігінің кез келген ауданында автоматты тәуелді бақылау (АDS) жүргізуге мүмкіндік береді. Автоматты тәуелді бақылау АDS (Аutomаdic Dependent Surveilence) - бұл бақылау әдісі, онымен сәйкес әуе кемелері беру түзулерінде борттық навигациялық жүйелерден және орын анықтау жүйелерінен алынған мәліметтерді, онымен қоса әуе кемесінің анықтама индексі мен орны жайлы төртөлшемді мағлұматтарды, автоматты түрде береді. Бұл ЖНЖ көмегімен ұшақ бортында алынған информацияның жерге автоматты түрде жеткізілетінін білдіреді.
1. 3. Тұтынушылардың Жерсеріктік радионавигациялық жүйелерге талаптары.
Азаматтық тұтынушылардың мұқтаждықтарын зерттеу ерекше қасиеттердің болу қажеттілігін анықтайды. Бірақ ЖРНЖ-ді орын анықтауда және ұшақтар мен тікұшақтардың навигациясы мақсатында қолдану жаңа, көп жағдайда қозғалыс қауіпсіздігін қамтамасыздандыру үшін жоғары, сандық талаптарды қозғайды. Мұндай талаптар дәлдіктік сипаттамаларға қатысты болады, мысалы, навигациялық параметрлерді анықтаудағы орташаквадратты қателерге қатысты (ОКҚ), және навигациялық қамтамасыздандыру сенімділігінің көрсеткіштеріне қатысты. Соңғы талаптар былай түсіндіріледі:
- қолжетімділік, оның өлшемі ретінде РНС-тың мәселені шешу барысындағы жұмыс қабілеттілігінің ықтималдылығы болып табылады;
- тұтастылық, өлшемі ретінде тең немесе берілгеннен кіші уақыт ішіндегі сәтсіздіктің анықталу ықтималдылығы анықталады.
- Қызмет етудің үздіксіздігі, өлшемі ретінде өозғалыс уақытының ең жауапты кездерінде жүйенің жұмыс істеу қабілетінің ықтималдығы қабылданады.
ХААҰ (Халықаралық азаматтық авиация ұйымы) сияқты халықаралық ұйымдардың құжаттарының талаптарын, сол сияқты басқа елдердің ұлттық радионавигациялық жоспарларын ескеру керек.
1. 3. 1. Әуе кемелерін навигациялық қамтамасыздандыруға қойылатын талаптар
Бұл талаптар қазір орын алған әуе кеңістігін бөлу жағдайында ұшақ ұшуларының қауіпсіздігін қамтамасыздандыру қажеттілігінде негізделген. Осыған сәйкес ұшудың әр түрлі сатылары қарастырылады, мысалы, жолдар, әуе түзулері, жоллардан тыс кеңістік бойынша ұшулар, ұшып шығу, қонуға даярлану және қону. Бұдан бөлек ұшып-қону жолағындағы (ҰҚЖ) жүгіріс және рөлдік жолақтардағы басқару қарастырылады.
Кесте1 де РРНП мәліметтері бойынша жоспарлық координаталарды және әуе кемесінің ұшу биіктігін анықтаудың ортаквадратты қателіктері берілген (жоллар мен жергілікті түзулер бойымен - абсолют, қонуға даярлық кезінде - геометриялық) . Қажетті көрсеткіштер есептелінетін негізге мәселелер үшін берілген, мысалы, бағыттық ұшу, әуежай ауданындағы ұшу, арнайы ұшу, қонуға даярлық. Қонуға даярлық үшін ХААҰ дәлдіктік сипаттамалардың тексерісі өтетін дәрежелары бойынша ҰҚЖ үстіндегі биіктіктер көрсетілген.
кесте1. Координаталарды және ұшудың биіктігін анықтау дәлдігіне қойылатын талаптар.
Қолжетімділік талаптары ұшудың сатыларынан және әуе қозғалысының белсенділігінен тікелей тәуелді. Қолжетімділіктің сандық мәндері марштруттық ұшулар кезінде 0, 999 . . . 0, ; әуежай ауданында ұшу кезінде және дәрежесыз қонуға даярлық кезінде - 0, . Қонуға даярлық және қону кезіндегі ХААҰ дәрежелары бойынша қолжетімділік талаптары құрал-жабдықтық қону жүйелеріне қойылатын талаптарға сәйкес келеді. Олардың сандық мәндері 1-ге жуық[13, 14] .
Бағыттық ұшулар, әуежай ауданындағы ұшулар және дәрежесіз қонуға даярлық үшін тұтастылық талаптары - ескерту уақыты сәйкесінше 10с, 10 с пен 2с кезінде 0, 999, ал қонуға даярлық және қону кезінде ХААҰ I, II, III дәрежелері үшін - 0, , 0, және ескерту уақыты 1 с аспаған кезде 0, 5[13, 14] .
«Әуетасымалдарының көлемінің үздіксіз ұлғаюы әуе кеңістігінің өткізгіштік қасиеттеріне өспелі талаптар қоюда. Бұл факторлар, оның ішінде түзетілген бағыттар арқылы жұмыс істетуге мүмкіндік, сол сияқты қазіргі навигациялық жүйелердің жоғары дәлдігі, RNP концепциясының пайда болуының алғышарттары болды», яғни қажетті навигациялық сипаттамалар (ҚНС) .
RNP концепциясы, ХААҰ ұйғарымы бойынша, әуе кеңістігінің белгілі бір аудандары шектерінде навигация құралдарының сипаттамаларын анықтайды, сондықтан әуе кеңістігіне сияқты, әуе кемелеріне де әсер етеді.
Бағыттық ұшулар кезіндегі RNP-ның 4 типі анықталған: RNPIішінде ықтималдылығы (Р) 95% болатын әуе кемесі қалуы керек жолақтың жартысына сәйкес келеді 1, 85 км (1, 0 теңіздік мил), RNP4 - 7, 4 км-де (4, 0 теңіздік миля), RNP12. 6 - 23, 3 км-де (12, 6 теңіздік мил), RNP20 - 37, 0 км-де (20, 0 теңіздік мил) .
Орналасу жері жайлы неғұрлым дәл мәліметтерді пайдалану нәтижесінде RNP 1 типі ОВД бағыттары бойынша ең эффективті ұшуларды қамтамасыз ету үшін, сол сияқты әуежай ауданынан керекті бағытқа өту кезіндегі әуе кеңістігін ұйымдастыру үшін қарастырылады.
RNP 4 типі навигациялық құралдар арасындағы шектеулі арақашықтықтарда негізделген әуе кеңістігінің схемалары мен ОВД бағыттары үшін арналады.
RNP 12, 6 типі навигациялық құралдармен қамтудың төмен деңгейлері бар аудандардағы бағыттардың оңтайландыруын кез келген бақыланатын әуе кеңістігінде және кез келген уақытта қамтамасыз етеді[16] .
1. 4. ЖНЖ-тың авиацияда қолданылуы
Бағыт бойынша ұшу
Әуе кемесінің бағыт бойынша ұшу кезінде координаталарды анықтаудың қажетті дәлдігі (СКО) 5, 8 км-ден 200 км-ге дейін құрайды[14] . Бағыттық ұшу үшін ХААҰ-мен жасалған ТНХ (RNP) сәйкес ӘК 95% (2 СКО) ықтималдықпен ±1, 85-тен ±37-ке дейін жолақта орналасуы керек. Біруақытта РРНП-да [14] беріктлілік бойынша талаптар қойылған: ескерту уақыты 10 с болған кездегі қолжетімділік пен тұтастылық бойынша 0, 999.
ГЛОНАСС пен GPS көмегімен координаталарды анықтаудың дәлдігі (СКО) 35 . . . 50 м шегінде болатындығын ескеріп, бұл жүйелердің борттық құралдары қойылған мәселелерді шешуге жарамды екені шығады. Сонымен қатар, ГЛОНАСС пен GPS жүйелерінің сәтсіздіктерді анықтау мен тұтынушыларды жұмыста мүмкін болатын бұзылыстар жайлы хабарландыру жөніндегі уақыттық сипаттамалары мен құрылу қағыйдалары. БА ЖРНЖ-ді ӘК-нің негізгі навигациялық құралдары ретінде арнайы шараларды қолданбастан қарастыруға бөгет болады. Мұндай шаралар қабылдағыштағы (RАIM) және навигациялық комплекстегі (ААIM) тұтастылықты бақылау алгоритмдерін орындау болып табылады.
Қазіргі уақытта әр түрлі фирмалармен (АlliedSignаl, Trimble, Gаrmin, Bendix, Mаgellаn, Collins және т. б. ) GPS қабылдағыштарының әртүрлі сипаттамалары бар біршама түрлері жасалған (негізінен бағыт бойынша ұшуды қамтамасыз ету үшін, АЭ ауданында және дәл емес қонуға даярлық үшін) .
Сонымен қатар құрылғылардың келесі топтарын айтуға болады:
- Қарапайым навигациялық мәселелрді шешетін арзан қабылдағыштар; олардың қолданысы жаздық құрамнан жақсы штурмандық дайындықты талап етеді, себебі ұшу кезінде орынды түзеу ғана жүргізіледі;
- Құрылғымен ұшу ережелерімен бағыт бойынша ұшуды жүзеге асыруға көмектесетін мәліметтерді бейнелеу функциясы бар көпфункциялы қабылдағыштар;
- Орналасқан жерді және байланысты анықтау функциялары біріктірілген GPS/Com қабылдағыштары; мұнда SOS сигналдары, координаталар, т. б. автоматты түрде жіберіле алады;
- ӘК құрамына «стационар» түрде кіретін құрылғылар.
Қонуға даярлық
Дәрежесыз (дәл емес) қонуға даярлықты қамтамасыз ету үшін керекті координаталарды анықтау дәлдігі (СКО) 50 м құрайды. Мұнда биіктікті анықтау дәлдігіне талаптар қойылмайды. Дәл емес қонуға даярлық үшін RNP 0, 3-ке тең; яғни ӘК ±556 м дәліз шектерінде 95% ықтималдықпен қалуы тиіс. Бұл талаптарғы ГЛОНАСС пен GPS жүйелерінің мүмкіндіктері сай екені анық.
Сонымен қатар сәтсіздікті табу және жоюмен (FDE) бірге тұтастылық басқарылымын пайдалану арқылы қажет сенімділікті қамтамасыздандыру және навигациялық анықтауыштарға деген қабілетті сақтау келесі жағдайларда ғана орындала алады:
- Қонуға даярлық кезінде 6 НКА GPS-дан (RАIM функциялары) кем емес ұшу жоспарын орындау;
- ГЛОНАСС и GPS жүйелерінің толық полных ОГ НКА пайдалану кезінде (RАIM функциялары) ;
- WААS, EGNOS, MSАSШДПС пайдалану кезінде;
- ААIM пайдалану кезінде.
Тұтастық бақылау функцияларына TSO С-129 сәйкес келесі талаптар қойылады:
... жалғасыСіз бұл жұмысты біздің қосымшамыз арқылы толығымен тегін көре аласыз.
- Іс жүргізу
- Автоматтандыру, Техника
- Алғашқы әскери дайындық
- Астрономия
- Ауыл шаруашылығы
- Банк ісі
- Бизнесті бағалау
- Биология
- Бухгалтерлік іс
- Валеология
- Ветеринария
- География
- Геология, Геофизика, Геодезия
- Дін
- Ет, сүт, шарап өнімдері
- Жалпы тарих
- Жер кадастрі, Жылжымайтын мүлік
- Журналистика
- Информатика
- Кеден ісі
- Маркетинг
- Математика, Геометрия
- Медицина
- Мемлекеттік басқару
- Менеджмент
- Мұнай, Газ
- Мұрағат ісі
- Мәдениеттану
- ОБЖ (Основы безопасности жизнедеятельности)
- Педагогика
- Полиграфия
- Психология
- Салық
- Саясаттану
- Сақтандыру
- Сертификаттау, стандарттау
- Социология, Демография
- Спорт
- Статистика
- Тілтану, Филология
- Тарихи тұлғалар
- Тау-кен ісі
- Транспорт
- Туризм
- Физика
- Философия
- Халықаралық қатынастар
- Химия
- Экология, Қоршаған ортаны қорғау
- Экономика
- Экономикалық география
- Электротехника
- Қазақстан тарихы
- Қаржы
- Құрылыс
- Құқық, Криминалистика
- Әдебиет
- Өнер, музыка
- Өнеркәсіп, Өндіріс
Қазақ тілінде жазылған рефераттар, курстық жұмыстар, дипломдық жұмыстар бойынша біздің қор #1 болып табылады.

Ақпарат
Қосымша
Email: info@stud.kz