Кинематикалық жұптар: анықтама, классификация және структуралық формулалар

ҚАЗАҚСТАН РЕСПУБЛИКАСЫНЫҢ ҒЫЛЫМ ЖӘНЕ БІЛІМ МИНИСТРЛІГІ
СЕМЕЙ ҚАЛАСЫНЫҢ ШӘКӘРІМ АТЫНДАҒЫ МЕМЛЕКЕТТІК УНИВЕРСИТЕТІ
Пән: ОРЭМ
ОӨЖ № 2
Тақырыбы: Кинематикалық жұп. Негізгі белгіленулері
Орындаған: Мажибек С. С
Оқутобы: ТО - 311
Тексерген: Джилкишева А. Г
Семей 2015ж
Мазмұны
Кіріспе
- Кинематикалық жұп
- Жұп арқылы звенолардың салыстырмалы қозғалысына жасалатын байланыстар саны бойынша кинематикалық жұптарды классификациялау.
- Семьялықтағы структуралық формулалар
- Пайдаланған әдебиеттер
Кіріспе
КИНЕМАТИКАЛЫҚ ЖҰПТАР ЖӘНЕ ОЛАРДЫ ЖІКТЕУ Кинематикалық жұп - өзара салыстырмалы қозғалыс жасай алатын екі буынның қосылысы. Бұл анықтамада кинематикалық жұпқа буындардың қосылысы, олардың салыстырмалы қозғалысын жасауға мүмкіндік беруі маңызды болып табылады. Кинематикалық жұпты құрай отырып буынның басқа буынмен нүктелер, сызықтар және беттер арқылы түйісуге мүмкіндік жасайтын жиынтығын кинематикалық жұптың элементі деп атайды. Кинематикалық жұп элементінің сипаты бойынша төменгі және жоғарғы болып бөлінеді. Кинематикалық жұптарда элементтер ретіндебеттер болса, олар төменгі кинематикалық жұптар деп аталады. Буындар сызықтар мен нүктелер арқылы түйісетін болса, онда кинематикалық жұптар жоғарғы деп аталады. Төменгі кинематикалық жұптар қайтымды, яғни жұптың буындарының екеуінің да салыстырмалы қозғалысының сипаты бірдей; жоғарғы жұптар қайтымды емес, мысалы үшін, қозғалмайтын рельспен сырғанаусыз домалайтын доңғалақ нүктелерінің траекториялары - циклоидалар (1) . Доңғалақты тоқтатып және оның бойымен рельсті домалататын болсақ, онда рельс нүктелерінің траекториялары эвольвенталар (2) деп аталатын қисықтар болады, бұлар мүлдем басқа қисықтар.
- Кинематикалық жұп
Кинематикалық жұп деп, жоғарыда көрсетілгендей, өз ара салыстырмалы қозғала алатын, жанасқан екі звеноның қосылысын айтады.
Басқа материалдық объектілердің, материалдық нүктенің немесе механикалық системаның қозғалыстарын шектеуді байланыс деп атаймыз.
Кинематикалық жұп өз құрамындағы звенолардың өз ара салыстырмалы қозғалысына белгілі U санды байланыс жасайды, мұның өзі осы жұптар звеноларының өз ара салыстырмалы қозғалысының еркіндік дәрежесін U санына кемітеді.
Осылайша кинематикалық жұп звеноларының еркіндік дәрежесін көрсететін
 саны мынаған тең болады:
саны мынаған тең болады:
немесе
 (2. 3)
(2. 3)
Байланыс U саны тек бүтін сан болады және бірден беске дейін өзгереді, яғни
 (2. 4)
(2. 4)
2. 3-сурет. І кластық кинематикалық 2. 4-сурет. ІІ кластық кинематикалық
жұп. жұп.
Егер байланыс саны
 болса, онда звенолар жанаспайды және олар кинематикалық жұп құрамайды, ал егер
болса, онда звенолар жанаспайды және олар кинематикалық жұп құрамайды, ал егер
 болса, онда звенолар өз ара салыстырмалы қозғалысын мүлде жоғалтады және кинематикалық жұп құрайтын екі звено қатаң қосылысқа айналады, яғни бір звено құрайды.
болса, онда звенолар өз ара салыстырмалы қозғалысын мүлде жоғалтады және кинематикалық жұп құрайтын екі звено қатаң қосылысқа айналады, яғни бір звено құрайды.
Енді еркін шарды алып, оның әр түрлі звенолармен кинематикалық жұптарды құрайтынын қарастырып көрелік. Байланыс санының өсуіне сәйкес кинематикалық жұп класының біртіндеп өзгеретінін көрсетелік:
1. Шарды жазықтыққа орналастырсақ (2. 3-сурет), кинематикалық жұп аламыз, бұл кинематикалық жұп әрбір звеноның өз ара салыстырмалы қозғалысында
 осы бойында жылжуын шектейді және бұл байланыстың теңдеуі мына түрде болады:
осы бойында жылжуын шектейді және бұл байланыстың теңдеуі мына түрде болады:
 . (2. 5)
. (2. 5)
Байланыс саны
 , сондықтан бұл кинематикалық жұпты 1 класқа жатқызу қажет.
, сондықтан бұл кинематикалық жұпты 1 класқа жатқызу қажет.
2. Шарды, ішкі диаметрі берілген шардың диаметріне тең, цилиндрге орналастырсақ, кинематикалық жұп (2. 4-сурет) аламыз, бұл кинематикалық жұп звенолардың өз ара салыстырмалы қозғалысына екі байланыс жасайды (
 ), осы арқылы ол екі координаталар осі бойынша қозғала алмайды. Кинематикалық жұп II класқа жатады және бұл байланыстардың теңдеулері мына түрде болады:
), осы арқылы ол екі координаталар осі бойынша қозғала алмайды. Кинематикалық жұп II класқа жатады және бұл байланыстардың теңдеулері мына түрде болады:
 . (2. 6)
. (2. 6)
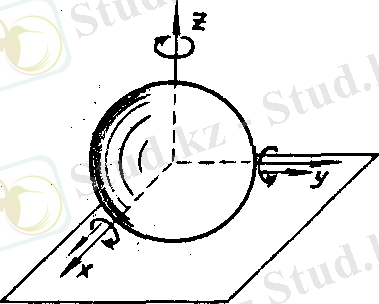
3. Шарды, ішкі диаметрті осы шардың диаметріне тең, бос шарға орналастырсақ, III класқа жататын кинематиклық жұп (2. 5-сурет) аламыз, бұл кинематикалық жұп звенолар қозғалысына үш байланыс жасайды, оны мына теңдеулермен көрсетуге болады:
 (2. 7)
(2. 7)
2. 5-сурет. ІІІ кластық 2. 6-сурет. ІV кластық 2. 7-сурет. V кластық
сфералық жұп. кинематикалық жұп. кинематикалық жұп және осы арқылы осьтер бойында болатын мүмкін үш орын ауыстыруды жоққа шығарады.
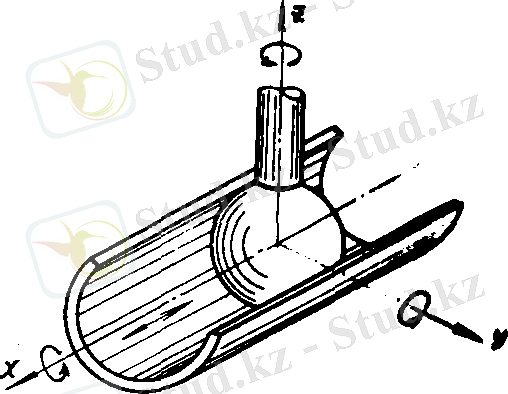
4. Саусақты шарды, ішкі диаметрі берілген шардың диаметріне тең саңлаулы қуыс шарға орналастырып, саусақтың диаметрін саңлаудың еніне тең етіп алсақ, IV кластық кинематикалық жұп (2. 6-сурет) аламыз, бұл кинематикалық жұп звенолардың өз ара салыстырмалы қозғалысына төрт байланыс жасайды, мұнда байланыстар теңдеулері мынадай түрде өрнектеледі:

5. Жоғарыда көрсетілген шар саңлауының ұзындығын саусақ диаметріне дейін қысқартсақ, V кластық кинематикалық жұп (2. 7-сурет) аламыз, мұнда кинематикалық жұп звенолардың өз ара салыстырмалы қозғалысына 5 байланыс жасайды, олар мынадай теңдеулермен өрнектеледі:
Бұл жағдайда кинематикалық жұп звеноларының өз ара салыстырмалы қозғалысы, яғни қалған еркіндік дәрежесінің саны бірге тең
және бұл қозғалыстың кинематикалық теңдеуін былай өрнектеуге болады:
,
Мұндағы
- саусақ осіне сәйкес болатын
осін айналу бұрышы.
Егер кинематикалық жұптағы кез келген звено нүктесінің салыстырмалы қозғалысының траекториялары жазық қисық болса, онда мұндай жұп жазық жұп деп аталады. Егер салыстырмалы қозғалыстың тераекториялары кеңістік қисық болса, онда мұндай кинематикалық жұп кеңістік жұп деп аталады.
2 . Жұп арқылы звенолардың салыстырмалы қозғалысына жасалатын байланыстар саны бойынша кинематикалық жұптарды классификациялау.
... жалғасыСіз бұл жұмысты біздің қосымшамыз арқылы толығымен тегін көре аласыз.
- Іс жүргізу
- Автоматтандыру, Техника
- Алғашқы әскери дайындық
- Астрономия
- Ауыл шаруашылығы
- Банк ісі
- Бизнесті бағалау
- Биология
- Бухгалтерлік іс
- Валеология
- Ветеринария
- География
- Геология, Геофизика, Геодезия
- Дін
- Ет, сүт, шарап өнімдері
- Жалпы тарих
- Жер кадастрі, Жылжымайтын мүлік
- Журналистика
- Информатика
- Кеден ісі
- Маркетинг
- Математика, Геометрия
- Медицина
- Мемлекеттік басқару
- Менеджмент
- Мұнай, Газ
- Мұрағат ісі
- Мәдениеттану
- ОБЖ (Основы безопасности жизнедеятельности)
- Педагогика
- Полиграфия
- Психология
- Салық
- Саясаттану
- Сақтандыру
- Сертификаттау, стандарттау
- Социология, Демография
- Спорт
- Статистика
- Тілтану, Филология
- Тарихи тұлғалар
- Тау-кен ісі
- Транспорт
- Туризм
- Физика
- Философия
- Халықаралық қатынастар
- Химия
- Экология, Қоршаған ортаны қорғау
- Экономика
- Экономикалық география
- Электротехника
- Қазақстан тарихы
- Қаржы
- Құрылыс
- Құқық, Криминалистика
- Әдебиет
- Өнер, музыка
- Өнеркәсіп, Өндіріс
Қазақ тілінде жазылған рефераттар, курстық жұмыстар, дипломдық жұмыстар бойынша біздің қор #1 болып табылады.

Ақпарат
Қосымша
Email: info@stud.kz