Кері байланыстар мен олардың автоматты реттеу жүйелеріне әсері

ҚАЗАҚСТАН РЕСПУЛИКАСЫ БІЛІМ және ҒЫЛЫМ МИНИСТРЛІГІ
ШӘКӘРІМ АТЫНДАҒЫ СЕМЕЙ МЕМЛЕКЕТТІК УНИВЕРСИТЕТІ
Инженерлік-технологиялық факультет
«Техникалық физика және жылуэнергетика» кафедрасы
ЯЭҚ технологиялық процестерінің автоматизациясы және жүйелік басқарылуы
СӨЖ
Кері байланыстар және олардың реттеуге әсері
Орындаған: Омарханов Е. Б.
Тексерген: Нургалиев Д. Н.
Семей 2015
Мазмұны
Кіріспе3
1 Кері байланыс4
2 Кері байланыстың реттеуге әсері5
Қорытынды7
Пайдаланылған әдебиеттер тізімі8
КіріспеАвтоматты реттеу жүйесінің негізгі теңдеулерін табу көптеген жағдайларда динамикалық байланыстар түсігнігін пайдалану арқылы әжептәуір жеңілдеуі мүмкін. Автоматты реттеу жүйесін жиі анықталған «түрлік» беріліс функциялары бар динамикалық байланыстар тізбегіне бөлуге болады. Бұл байланыстар бір-бірімен әр түрлі тәсілмен байланыса алады. Жиі кездесетін байланыстарға келесі байланыстардың қосылыстары жатады:
- байланыстардың тізбекті қосылысы
- байланыстардың параллель қосылысы
- кері байланыстар [1] .
Кері байланыс (1 сурет) оң бола алады, егер де екінші байланыстан шыққан х 3 сигналы х 1 сигналымен бірінші байланыстың, терістің шығысында қосылса және егер ол есептелсе.
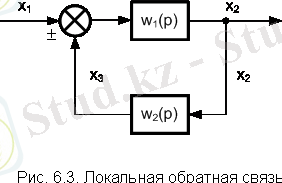
1 сурет. Локальді кері байланыс
Мұндай байланыстар тізбегінің нәтижелік беріліс функциясын табу үшін келесі қатынасты жазамыз:
 ,
,
Мұндағы қосу белгісі - оң кері байланысқа, ал азайту белгісі - теріс кері байланысқа жатады. Бұл теңдеулерді қоса шеше отырып мына теңдеуді аламыз:
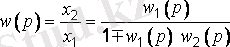 .
.
Мұндағы азайту белгісі - оң кері байланысқа, ал қосу белгісі - теріс кері байланысқа жатады.
Әдетте динамикалық байланыстар түсінігін пайдалану кезінде жабық жүйенің беріліс функциясы оңайырақ табылады. Содан соң бұрын қарастырылған ережелер бойынша автоматты реттеу жүйесінің теңдеуі оңай табылады [2] .
2 Кері байланыстың реттеуге әсеріКері байланысты реттеу жүйесінің қарапайым үлгісі ретінде кемені басқаратын адамды алуға болады. Жүргізушінің тапсырмасы офицердің бұйрығына сәйкес кеменің бағытын ұстау болып табылады. Ол бұл тапсырманы кеменің бағытындағы қателікті бақылай отырып орындайды. Қателік компас бойынша тексерілген дұрыс бағыт пен офицердің бұйрығындағы бағытпен салыстырыла отырып анықталады. Қателік туындаған жағдайда жүргізуші штурвалды айналдырады, осындай жолмен, кеменің рөлін ауытқытады. Рөлдің ауытқуына бағына отырып кеме біраз айналу жылдамдығына ие болады. Соның есебінен кеменің бағыты қателіктің азаю бағытында өзгеретін болады. Қателікті үзіліссіз бақылай отырып жүргізуші кеменің бағыты офицердің бұйрығындағы бағытқа жуықтауы үшін штурвалды бұра бере алады. Егер теңіз тыныш болса және біраз самал жел соғып тұрса жүргізуші өз міндетін оңай атқарады және берілген бағытты дәл ұстай алады. Теңіз толқындап жатқанда немесе қатты жел тұрғанда жүргізушінің тапсырмасы қиындайды, және ол енді бағытты жеткілікті дәл ұстай алмайды.
Жаңа ғана қарастырылған мысалға ойша жүгіне отырып кері байланысты реттеу жүйесіне мүмкін анықтама береміз. Автоматты реттеу жүйесі - шығыс деп аталатын бір физикалық шаманың белгілі бір мәнін сақтау үшін қызмет жасайтын элементтердің жиынтығы болып табылады. Бұл мән шамамен идеалды шығысқа тең болуы керек. Ол өз кезегінде кіріс деп аталатын басқа шамалармен математикалық байланыста болуы керек [3] .
Кері байланысты реттеу жүйесі келесі ерекшеліктерге де ие:
- жүйенің шығымқа әсері бөлшектеп шығыс сигналының өзімен анықталады;
- шығыс сигналын өзгерту үшін қажетті энергия негізінен кіріске байланысты емес көздерден алынады.
Қорытынды ... жалғасыЖоғарыда қарастырған мысалда идеалды шығыс сигналы жүргізушінің кіріс сигналына қарағанда кеменің өзі қалайтын бағыты болып табылады. Бұл мысалда шығыс сигналы қайтадан кіріске түседі, осындай жолмен, өзіне әсер етеді, себебі ол жүргізуші рөлді бұру үшін пайдаланатын қателіктің құраушысы болып табылады. Кемені бұру үшін энергия, негізінен, кеменің судағы қозғалысын қамтамасыз ететін және рөлдің ауытқуы кезінде айналу моментін жасайтын жүріс қозғалтқышынан алынады. Теніз толқындарының және желдің кеменің корпусына әрекеті жүйеге қосымша кіріс сигналдарын құрайды. Олар, әдетте, наразылықтар деп аталады, өйткені қаланатын сигнал оларға тәуелді емес [4] .
Сіз бұл жұмысты біздің қосымшамыз арқылы толығымен тегін көре аласыз.
- Іс жүргізу
- Автоматтандыру, Техника
- Алғашқы әскери дайындық
- Астрономия
- Ауыл шаруашылығы
- Банк ісі
- Бизнесті бағалау
- Биология
- Бухгалтерлік іс
- Валеология
- Ветеринария
- География
- Геология, Геофизика, Геодезия
- Дін
- Ет, сүт, шарап өнімдері
- Жалпы тарих
- Жер кадастрі, Жылжымайтын мүлік
- Журналистика
- Информатика
- Кеден ісі
- Маркетинг
- Математика, Геометрия
- Медицина
- Мемлекеттік басқару
- Менеджмент
- Мұнай, Газ
- Мұрағат ісі
- Мәдениеттану
- ОБЖ (Основы безопасности жизнедеятельности)
- Педагогика
- Полиграфия
- Психология
- Салық
- Саясаттану
- Сақтандыру
- Сертификаттау, стандарттау
- Социология, Демография
- Спорт
- Статистика
- Тілтану, Филология
- Тарихи тұлғалар
- Тау-кен ісі
- Транспорт
- Туризм
- Физика
- Философия
- Халықаралық қатынастар
- Химия
- Экология, Қоршаған ортаны қорғау
- Экономика
- Экономикалық география
- Электротехника
- Қазақстан тарихы
- Қаржы
- Құрылыс
- Құқық, Криминалистика
- Әдебиет
- Өнер, музыка
- Өнеркәсіп, Өндіріс
Қазақ тілінде жазылған рефераттар, курстық жұмыстар, дипломдық жұмыстар бойынша біздің қор #1 болып табылады.

Ақпарат
Қосымша
Email: info@stud.kz