Қозғалмайтын нүктесі бар қатты дененің сфералық қозғалысы: Эйлер бұрыштары мен қозғалыс теңдеулері

ХII ТАРАУ

ДЕНЕНІҢ АЙНАЛУЫ
12. 1 Сфералық қозғалыс. Эйлер бұрыштары. Сфералық қозғалыстың теңдеулері.
Қозғалмайтын нүкте төңірегіндегі қатты дененің қозғалысын сфералық қозғалыс деп атайды. Қозғалмайтын нүкте төңірегіндегі қатты дененің қозғалысы сфералық қозғалыс деп аталу себебі бұл нүктеден өзге нүктелердің бәрі радиустары әр-түрлі болған сфералардың бетінде қозғалатын болып, олардың ортақ центрі қозғалмайтын нүктеде жатады. Мысал ретінде гироскоптың, волчоктың қозғалыстарын алуға болады.
Өзге жоғарыда қаралған қозғалыстар сияқты бұл қозғалыс үшін де дененің кез-келген уақыттағы орнын анықтайтын параметрлерді табуға әрекет жасайық. Бұл жерде ең көп тарағаны Эйлердің ұсынған параметрлері. Соған тоқталайық.
Дененің қозғалмайтын О нүктесінен өтетін қозғалмайтын хОуz координаттар жүйесін алайық (12. 1-сурет) . Басқа х 1 Оу 1 z 1 координаттар жүйесін дененің тікелей өзімен байланыстырайық. Олай болса дененің хОуz координаттар жүйесіне қатысты кез-келген уақыттағы алатын орнын анықтау үшін қозғалатын санақ жүйесінің қозғалмайтын санақ жүйесіне қатысты алатын орнын беру жеткілікті. Бұл үшін Эйлер бір-біріне тәуелді болмаған үш бұрышты енгізуді ұсынды. Олар прецессия y, нутация q және өзіндік айналу j бұрыштары.
 z
1
z
z
1
z
12. 1-сурет
х 1 Оу 1 координат жазықтығы қозғалмайтын хОу жазықтығымен түйіндер сызығы деп аталатын ОК түзуі бойлап қиылысқан болсын дейік.
Қозғалмайтын Ох өсімен түйіндер сызығының арасындағы бұрыш прецессия бұрышы деп аталып y әрпімен белгіленеді. y бұрышы өзгеріп отыруы үшін дене Оz өсінің төңірегінде айналуы керек, бұл өсь прецессия өсі деп аталады. y бұрышы оң деп есептелінеді, егер Оz өсінің оң ұшынан қарап отырған бақылаушы Ох тан ОКға бұрылу сағат тіліне қарама-қарсы бағытта көрінетіндей болса.
Түйіндер сызығы мен қозғалатын Ох 1 өсінің арасындағы бұрыш өзіндік айналу бұрышы деп аталып, j әрпімен белгіленеді. j бұрышы өзгерген кезде дене өзіндік айналу өсі деп аталатын Оz 1 дің төңірегінде айналады. j бұрышы оң деп есептелінеді, егер бақылаушы Оz 1 өсінің оң ұшынан қарағанда оған ОК дан Ох 1 ге бұрылу сағат тіліне қарама-қарсы бағытта орындалатындай болса.
хОу пен х 1 Оу 1 жазықтықтарының, немесе Оz пен Оz 1 өстерінің арасындағы бұрыш нутация бұрышы деп аталып q әрпімен белгіленеді. q өзгергенде дене нутации өсі деп аталатын ОК ның төңірегінде бұрылады. q бұрышы оң деп есептелінеді, егер ОК ның оң ұшынан қарап отырған бақылаушы, поворот от оси Оz өсінен Оz 1 өсіне бұрылу сағат тіліне қарама-қарсы бағытта орындалатындай болса.
Эйлер бұрыштары қозғалатын санақ жүйесінің қозғалмайтын санақ жүйесіне қатысты алатын орнын бірден-бір анықтайтын координаталар , демек бұл координаталар қозғалмайтын нүктесі бар дененің қозғалысын да зерттеуге мүмкіншілік береді.
Сонымен қозғалмайтын нүкте төңірегінде қатты дененің айналуы кезіндегі оның теңдеулері
 ;
;
 ;
;
 , (12. 1)
, (12. 1)
мұндағы
 - Эйлер бұрыштары, ол денемен қатты бекітілген
- Эйлер бұрыштары, ол денемен қатты бекітілген
 жүйенің қозғалмайтын
жүйенің қозғалмайтын
 жүйеге қатысты кез-келген уақытта алған орнын анықтайды (12. 1- сурет ) .
жүйеге қатысты кез-келген уақытта алған орнын анықтайды (12. 1- сурет ) .
Эйлер бұрыштарынан пайдаланып, дененің әр-бір уақыт аралығындағы бұрыштық жылдамдығы мен бұрыштық үдеуін және дененің әр-бір нүктесінің жылдамдығы мен үдеуін анықтауға болады.
12. 2 Қозғалмайтын бір нүктесі бар қатты дененің кез келген шекті уақыт аралығындағы орынауыстыруы туралы теорема (Даламбер-Эйлер теоремасы) .
 Ø
Теорема.
Қозғалмайтын бір нүктесі бар қатты дененің кез келген орынауыстыруын оны қозғалмайтын нүкте арқылы өтетін өсь төңірегінде белгілі бір бұрышқа айналдыру арқылы орындауға болады.
Дәлелдеу.
Қатты дененің кеңістіктегі кез келген орынауыстыруы оның бір түзудің бойында жатпайтын үш нүктесінің координаталарымен анықталады. Егер оның бір нүктесі қозғалмайтын болса, онда оның орны осы қозғалмайтын нүктемен бір түзудің бойында жатпайтын екі нүктесінің координаталарымен табылады. Теореманы дәлелдеу үшін қозғалмайтын О нүктесі орталық болатын сфералық бетті аламыз (12. 2-сурет) .
Ø
Теорема.
Қозғалмайтын бір нүктесі бар қатты дененің кез келген орынауыстыруын оны қозғалмайтын нүкте арқылы өтетін өсь төңірегінде белгілі бір бұрышқа айналдыру арқылы орындауға болады.
Дәлелдеу.
Қатты дененің кеңістіктегі кез келген орынауыстыруы оның бір түзудің бойында жатпайтын үш нүктесінің координаталарымен анықталады. Егер оның бір нүктесі қозғалмайтын болса, онда оның орны осы қозғалмайтын нүктемен бір түзудің бойында жатпайтын екі нүктесінің координаталарымен табылады. Теореманы дәлелдеу үшін қозғалмайтын О нүктесі орталық болатын сфералық бетті аламыз (12. 2-сурет) .
12. 2-сурет
Осы бетке қатысты екі А және В нүктелерін таңдаймыз. Онда бұл дененің орны осы сфераның ең үлкен шеңберінің АВ доғасы арқылы анықталады. Дене өз орнын ауыстырған кездегі АВ доғасының жаңа орны А 1 В 1 болсын. Енді А нүктесі мен А 1 ді, В нүктесі мен В 1 ді сфераның ең үлкен шеңберінің доғаларымен қосып, бұл доғаларды D және Е нүктелермен тең екіге бөлеміз. Осы нүктелерден АА 1 және ВВ 1 доғаларға Р * нүктесінде қиылысқанға дейін перпендикулярлар жүргіземіз. Р * нүктесі А және А 1 ден В және В 1 ден бірдей қашықтықта.
Олай болатын болса АВР * және А 1 Р * В 1 сфералық үшбұрыштар өзара тең. Бұл үшбұрыштардың теңдігінен ÐАР * В =ÐА 1 Р * В 1 келіп шығады. Осы теңдіктің екі жағына да ÐА 1 Р * В 1 қоссақ, онда
ÐАР * В + ÐАР * В 1 = ÐА 1 Р * В 1 + ÐАР * В 1 ,
немесе
ÐАР * А 1 = ÐВР * В 1 = Da.
болады.
Енді денені ОР * өсінің төңірегінде Da бұрышқа бұрсақ, онда АВ және А 1 В 1 доғалары бір-бірінің үстеріне түседі. Демек дененің АВ доғасымен анықталатын орны ол қозғалғанда А 1 В 1 доғасымен анықталатын орнына денені ОР * өсінің төңірегінде бір айналдырғаннан түсуге болады.
12. 3 Лездік айналу өсі
Даламбер-Эйлер теоремасында ОР * өсі шекті айналу өсі, ал Da- шекті айналу бұрышы деп аталған еді. Егер уақыт аралығы Dt®0 болса, онда шекті айналу өсі кеңістікте алатын орнын өзгерте отырып өзінің шегіне ұмтылуға әрекет етеді. Dt®0 кездегі шекті айналу өсінің шегі t уақыт кезеңі үшін лездік айналу өсі деп аталады. Лездік айналу өсі дененің берілген уақыт кезеңіндегі жылдамдықтары нөлге тең болған нұктелерінің геометриялық орны. Сонымен дененің сфералық қозғалысы кезінде
1) әр-бір кезең үшін қозғалмайтын нүктеден өтуші лездік айналу өсінің болары сөзсіз;
2) лездік айналу өсінің кеңістікте алатын орны уақытқа байланысты үздіксіз өзгеріп отырады;
3) сфералық қозғалысты құрайтын денені қозғалмайтын нүктеден өтуші кетпе-кет орын ауыстырып отыратын өсь төңірегінде үздіксіз айналу қатарынан тұрады деп қарастыруға болады.
Сонымен қаралып отырған жағдайдайдың қозғалмайтын өсьті айналудан өзгешілігі дененің бұрыштық жылдамдығы уақыт өтуімен байланысты тек шамасы жөнінен ғана емес, бағыты жөнінен де өзгеріп отырады. Олай болса жалпы жағдайда лездік айналу өсі әр уақыт кезеңінде әртүрлі. Демек, лездік айналу өсьтерінің геометриялық орны төбесі О нүктесінде болатын конустық бет құрайды.
Лездік айналу өсьтерінің қозғалмайтын хОуz координаттар жүйесіне қатысты алатын геометриялық орны қозғалмайтын аксоид, ал қозғалатын х 1 Оу 1 z 1 координаттар жүйесіне қатысты алатын геометриялық орны қозғалмалы аксоид деп аталады
Сонымен қатар қозғалмалы аксоид қозғалмайтын аксоидтың бетімен сырғанамай домалайды.
12. 4 Дененің сфералық қозғалысы кезіндегі бұрыштық жылдамдығы мен бұрыштық үдеуі
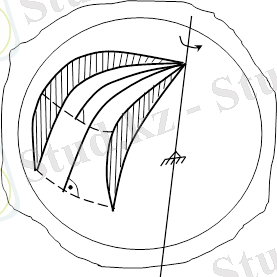
Дененің сфералық қозғалысы кезінде t уақытқа сәйкес келетін оның орны I, ал t + Dt уақытқа сәйкес келетін орны II болсын (12. 3-сурет) . Онда Даламбер-Эйлер теоремасына сәйкес, денені I-орнынан II-орынға өткізу үшін төңірегінде Da бұрышқа бұратындай ОР * өсі табылады. Бұл кезде бұрыштық жылдамдығық
 (12. 2)
(12. 2)
өрнектен табылып, ОР * өсі бойлап бағытталады. Dt®0 болса, онда w * өзінің бір шегіне ұмтылады. Dt®0 да w * ның бұл шегі белгілі уақыттағы дененің лездік бұрыштық жылдамдығы деп аталады және оның шамасы төмендегідей өрнекпен анықталады:
Ескерту.
Бұл шек әрине
 ға тең емес, себебі Da a функцияның арттырмасы емес.
ға тең емес, себебі Da a функцияның арттырмасы емес.
 векторы лездік айналу өсі бойлап солай бағытталуы керек оның ұшынан қарағанда дененің айналуы сағат тіліне қарама-қарсы бағытта орындалуы шарт. Лездік айналу өсінің алатын орны уақытқа тәуелді болғандықтан оның тек модулі ғана емес, бағыты
да өзгереді. Егер жоғарыда бұрыштық жылдамдықты тапқандай тәсілді бұл жерде де қолдансақ, онда дененің бұрыштық үдеуі мына формуламен анықталады:
векторы лездік айналу өсі бойлап солай бағытталуы керек оның ұшынан қарағанда дененің айналуы сағат тіліне қарама-қарсы бағытта орындалуы шарт. Лездік айналу өсінің алатын орны уақытқа тәуелді болғандықтан оның тек модулі ғана емес, бағыты
да өзгереді. Егер жоғарыда бұрыштық жылдамдықты тапқандай тәсілді бұл жерде де қолдансақ, онда дененің бұрыштық үдеуі мына формуламен анықталады:
 . (12. 4)
. (12. 4)
Бұрыштық үдеудің векторы бұрыштық жылдамдықтан уақыт бойынша алынған бірінші туындыға тең.
Енді бұрыштық
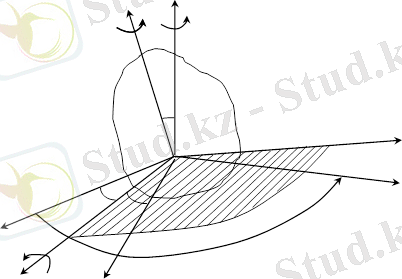
 үдеудің бағытын анықтайық. Бұл үшін қозғалмайтын О нүктесінен кетпе-кет уақытқа сәйкес келетін бұрыштық жылдамдықтарды өткізейік. Одан кейін бұл векторлардың ұштарын қосып бұрыштық жылдамдықтың годографын табамыз (12. 4-сурет) .
векторының ұшы болған А нүктесінің жылдамдығын
үдеудің бағытын анықтайық. Бұл үшін қозғалмайтын О нүктесінен кетпе-кет уақытқа сәйкес келетін бұрыштық жылдамдықтарды өткізейік. Одан кейін бұл векторлардың ұштарын қосып бұрыштық жылдамдықтың годографын табамыз (12. 4-сурет) .
векторының ұшы болған А нүктесінің жылдамдығын
 деп белгілейік. Бұл нүктенің радиус-векторы
. Сондықтан
деп белгілейік. Бұл нүктенің радиус-векторы
. Сондықтан
 (12. 5)
(12. 5)
болып, бұрыштық жылдамдықтың годографының жанамасы бойлап бағытталған. Бірақ
 . Олай болса
. Олай болса
 , яғни бұрыштық үдеу бұрыштық жылдамдық векторының ұшы болған А нүктесінің сызықтық
, яғни бұрыштық үдеу бұрыштық жылдамдық векторының ұшы болған А нүктесінің сызықтық
жылдамдығына тең.
векторы қозғалмайтын О нүктесінен бастап қойылады. Бұрыштық
үдеуі бағытталған ОЕ өсі бұрыштық үдеу өсі деп аталады. Сонымен сфералық қозғалыстың қозғалмайтын өсь төңірегіндегі дененің қозғалысынан айырмашылығы мұның бұрыштық
үдеуінің бағыты бұрыштық
жылдамдықтың бағытымен дәлме-дәл түспейді.
Егер
 арқылы лездік өсінің бірлік векторы белгіленгендей болса, онда
арқылы лездік өсінің бірлік векторы белгіленгендей болса, онда
 . Демек
. Демек
 ;
;
Бұл жерде
 (12. 6)
(12. 6)
(12. 6) дағы
 векторы лездік өсі бойлап бағытталып,
векторы лездік өсі бойлап бағытталып,
 векторының тек жылдамдығының шамасының өзгеруін сыйпаттайды.
векторының тек жылдамдығының шамасының өзгеруін сыйпаттайды.
 векторы болса
векторының жылдамдығының бағыт бойынша өзгеруін көрсетеді. Егер
векторының айналған кездегі бұрыштық жылдамдығын
векторы болса
векторының жылдамдығының бағыт бойынша өзгеруін көрсетеді. Егер
векторының айналған кездегі бұрыштық жылдамдығын
 деп белгілесек, онда
деп белгілесек, онда
 . (12. 7)
. (12. 7)
және
 векторларын қозғалмайтын
О
нүктесіне қойылған деп есептейміз.
векторларын қозғалмайтын
О
нүктесіне қойылған деп есептейміз.
Қозғалмайтын өстерге болған лездік
бұрыштық жылдамдық векторының проекцияларын анықтайтын формулалар төмендегідей көрініске ие болады:
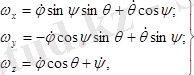 (12. 8)
(12. 8)
Ал денемен тікелей байланыста болған өстерге
бұрыштық жылдамдықтың проекциялары мына өрнектермен табылады
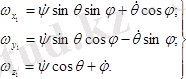 (12. 9)
(12. 9)
Бұрыштық жылдамдықтың шамасы
 (12. 10)
(12. 10)
тең.
12. 5 Бір нүктесінде бекітілген қатты дене нүктесінің сызықтық жылдамдығы. Лездік айналу өсінің теңдеуі.
Дененің сфералық қозғалысын әр-бір кезең үшін қозғалмайтын нүктеден өтетін лездік өсінің төңірегінде оның айналуынан тұрады деп қарастырсақ болады. Сол себептен де дененің кез келген М нүктесінің жылдамдығын Эйлер формуласы арқылы анықтаймыз, яғни
 (12. 11)
(12. 11)
Бұл жердегі
 - қозғалмайтын О нүктесінен өтетін М нүктенің радиус-векторы. Олай болса бұл нүктенің жылдамдығы мына формуламен табылады:
- қозғалмайтын О нүктесінен өтетін М нүктенің радиус-векторы. Олай болса бұл нүктенің жылдамдығы мына формуламен табылады:
v
 . (12. 12)
. (12. 12)
Мұндағы h - М нүктесінің лездік айналу өсіне дейінгі өзгеріп отыратын арақашықтығы
(12. 13) тегі
 - қозғалмайтын координаттар өстеріне болған жылдамдықтың проекциялары;
- қозғалмайтын координаттар өстеріне болған жылдамдықтың проекциялары;
 - бұрыштық жылдамдықтың қозғалмайтын координаттар өстеріне болған проекциялары; х, у, z-қаралып отырған нүктенің қозғалмайтын өстерге қатысты координаттары.
- бұрыштық жылдамдықтың қозғалмайтын координаттар өстеріне болған проекциялары; х, у, z-қаралып отырған нүктенің қозғалмайтын өстерге қатысты координаттары.
Жоғарыда келтірілген формулаларды қозғалатын координаттар өстеріне де қатысты жазуға болады. Егер дененің сфералық қозғалысын зерттеп отырған шақта лездік айналу өсінде жататын оның бірер-бір нүктесін алсақ, онда бұл нүктенің радиус-векторы
мен бұрыштық жылдамдық
бір түзудің бойымен бағытталады.
векторы зерттеліп отырған кездегі жылдамдықтары нөлге тең
Сіз бұл жұмысты біздің қосымшамыз арқылы толығымен тегін көре аласыз.
- Іс жүргізу
- Автоматтандыру, Техника
- Алғашқы әскери дайындық
- Астрономия
- Ауыл шаруашылығы
- Банк ісі
- Бизнесті бағалау
- Биология
- Бухгалтерлік іс
- Валеология
- Ветеринария
- География
- Геология, Геофизика, Геодезия
- Дін
- Ет, сүт, шарап өнімдері
- Жалпы тарих
- Жер кадастрі, Жылжымайтын мүлік
- Журналистика
- Информатика
- Кеден ісі
- Маркетинг
- Математика, Геометрия
- Медицина
- Мемлекеттік басқару
- Менеджмент
- Мұнай, Газ
- Мұрағат ісі
- Мәдениеттану
- ОБЖ (Основы безопасности жизнедеятельности)
- Педагогика
- Полиграфия
- Психология
- Салық
- Саясаттану
- Сақтандыру
- Сертификаттау, стандарттау
- Социология, Демография
- Спорт
- Статистика
- Тілтану, Филология
- Тарихи тұлғалар
- Тау-кен ісі
- Транспорт
- Туризм
- Физика
- Философия
- Халықаралық қатынастар
- Химия
- Экология, Қоршаған ортаны қорғау
- Экономика
- Экономикалық география
- Электротехника
- Қазақстан тарихы
- Қаржы
- Құрылыс
- Құқық, Криминалистика
- Әдебиет
- Өнер, музыка
- Өнеркәсіп, Өндіріс
Қазақ тілінде жазылған рефераттар, курстық жұмыстар, дипломдық жұмыстар бойынша біздің қор #1 болып табылады.

Ақпарат
Қосымша
Email: info@stud.kz