Ленточалы конвейерге арналған бірсатылы цилиндрлі редукторлы механикалық приводты жобалау және есептеулер

Жұмыс түрі: Дипломдық жұмыс
Тегін: Антиплагиат
Көлемі: 56 бет
Таңдаулыға:
Механикалық приводты жобалау
Мазмұны
Жобалауға тапсырма. 3
Кіріспе 4
- Приводтың кинематикалық және күштік есептелуі 5Приводтың жалпы П. Ә. К. анықтау 5Электродвигатель қуатын анықтау және электрдвигательді каталог бойынша таңдау 5Приводтың жалпы берілу санын анықтау және оны берілістер бойынша болу 6Редуктор валдарындағы айналым моменттерін және айналым жиілігін анықтау 7
- Тістердің байланыс және майысу (үгілу) төзімділігін есептеу үшін мүмкін болатын кернеуді (ауырпалықты) анықтау 8Тістердің беткі жағындағы қаттылық, термоөңдеу және тіс дөңгелектері материалдардың таңдау 8Мүмкін болатын байланыс кернеуін (ауырпалығын) анықтау 8Мүмкін болатын майысу кернеуін (ауыртпалығын) анықтау 10
- Тісті беріліс есебі 12
3. 1 Тісті берілістің жобалық есебі 12
3. 2 Тісті берілістің тексерілу есебі 15
3. 3 Тісті берілістің геометриялық параметрлерін анықтау 16
3. 4 Ілініс нүктесіндегі күшті анықтау 18
4. Эскизді құрылымын жасау 20
5. Валдар есебі 23
5. 1 Валдардың жобалық есебі 23
5. 2 Валдарды төзімділікке есептеу 30
6. Айналу подшипниктерінің есебі 34
6. 1 Тез қозғалатын вал подшипниктерінің есебі 34
6. 2 Жай қозғалатын подшипниктер есебі 36
7. Шпонды байланыс есебі. 38
7. 1 Валдың дөңгелекпен шпонды байланысы есебі 38
7. 2 Кірмелі валдың муфтамен шпонды байланысының есебі 39
7. 3 Шықпалы валдың цепті берілістегі жұлдызшамен шпонды байланысының есебі 39
8. Редуктор бөлшектерінің құрастырылуы 40
8. 1 Тісті дөңгелектері құрылысы 40
8. 2 Жай қозғалатын валдың құрылысы 43
8. 3 Түйіндер подшипниктерінің құрылысы 44
8. 4 Редуктор корпусы элементтерінің құрылысы 46
9. Майлау әдісін, маркасын және май көлемін таңдау 48
10. Редукторды құрастыру 49
Қорытынды 54
Пайдаланылған әдебиеттер 55
Жобалауға тапсырма
Бірсатылы цилиндрлі редукторы бар ленталық конвейерге приводты жобалау.
Сызба 1, нұсқа 5
Алғашқы мәліметтер
1. Цепті берілістің жетектегі жұлдызшасындағы қуаты Р 3 =6 квт.
2. Жетек жұлдызшасының бұрыштық жылдамдығы w 3 =2, 9 п рад/с.
3. Редуктор қызметінің мерзімі t=2 сағ.
4. Жұмыс істеу режимі - тұрақты
Жоба мазмұны:
- Есепті - анықтамалық құжат (Аи)
- Приводтың жалпы көрінісінің сызбасы (жетекшісінің нұсқауымен) (А1)
- Редуктордың құрастырма сызбасы (А1)
- 2-3 бөлшектің сызбалары (А3, А4) .
Кіріспе
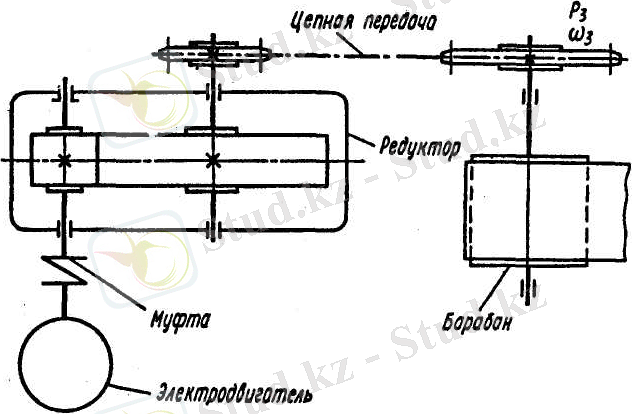
Қарастырылып отырған механикалық привод электродвигатель, байланыстырушы муфта, бірсатылы цилиндрлі редуктор және берілістен тұрады.
Жалпақтісті цилиндрлі дөңгелектері бар жобаланып отырған көлденең бірсатылы редуктор айналым моментін екі парралель осьтер арасына беруге арналған. Редуктор - шойын корпуста, валдарға подшипниктермен біріктірілген, және де ол тісті берілістен тұрады. Редуктор корпусы болттармен бекітілген картер мен қақпақтан тұрады. Корпус - көлденең, валдар осьтерінде орналасқан. Картер мен қақпақша үстіне қарай байланысқан, ал толық жинақталғаннан кейін герметикпен Корпус жабылады. Қақпақшалар диаганаль бойынша орналасқан. Картер мен қақпақша үстіне қарай байланысқан, ал толық жинақталғаннан кейін герметикпен Корпус жабылады. Қақпақшалар диагональ бойынша орналасқан екі штиф арқылы корпусқа қатысты бекітілген.
Шестерня негізгі валмен (вал - шестерия) бірге жобаланған. Дөңгелек жетектегі (негізгі) валға Н 7 /r6 дәрежесінде қондырылған (орнатылған), айналым моменті призматикалық шпонко арқылы беріледі. Дөңгелек қозғалысы бір жағынан тірек втулкасы, яғни подшипниктің ішкі және сыртқы сақинасы подшипник қақпақшасына тіреледі.
Негізгі және жетектегі валдар радиалды шариктік подшипниктерге орналастырылған. Тың қақапашалар жағынан орнатылған тығыз прокладкалар арасындағы металы прокладкалар арқылы подшипниктер реттеліп отырады. Беріліс пен подшипниктерді майлау корпус қақпағының көретін (бақылайтын) тесігі арқылы құйылатын сұйық майдың шашырауы арқылы жүзеге асырылды. Май деңгейін ұзын майкөрсеткіштен тексереді. Қолданылған май резьбалы тығын арқылы жабылатын корпустың төменгі жағындағы тесіктен құйылып алынады.
Редуктордың жоғарғы көру қақпағы ручкамен қамтамасыз етілген, ол редуктордың жабық аумағын атмосферамен байланыстыратын тесік болып табылады. Редукторды көтеру және тасымалдау үшін тросқа арналған тесіктері бар құлақшалар корпус қақпағына қойылған. Қақпақтарды ажыратуды оңайлату мақсатында қақпақ фланцлерінде қыспа винттерге арналған резьбалы тесіктер қарастырылған.
- Приводтың кинемаатикалық және күштік есебі. Приводтың жалпы ПӘК анықтау. Жалпы ПӘК привод элементтерінің: ПӘК туындысына тең.
жалпы =
м . J ред. Jцы (1)
Мұндағы

J м - муфта ПӘК
J ред - редуктор ПӘК
J цы - цепті беріліс ПӘК,
Редуктор ПӘК мыналарға тәуелді анықталады.
J ред =J 2 к J 2 м , (2)
Мұндағы
1 - тісті жұптық ПӘК
2 - қозғалу подшиптерінің жұбының ПӘК
- сыртқы зацепление саны,

m- редуктор валдарының саны, m =2
(2) формула бойынша ПӘК мәндерін
1 =0, 97,
2 =0, 99 (8) деп қабылдай отырып, редуктор ПӘК анықтаймыз.

ред
1 к .
2 m =0. 97 1 . 0. 99 2 =0. 95
(1) формула бойынша ПӘК мәндерін
м =0, 98,
цп 0, 94 дей отырып приводтың жалпы ПӘК табамыз
 жалпы =
жалпы =
 m
.
m
.
 ред
.
ред
.
 цп
=0, 88.
цп
=0, 88.
1. 2 Электродвигатель қуатын анықтау және электродвигательді каталог бойынша таңдау
Жалпы пайдалы әсер коэфициенті пайдалы әсер коэфиценті пайдалы қуаттық Р пайд. Жұмсалған қуатқа Р жұм. Қуатқа қатынасына (немесе жетектегі вал қуатының Р жет. Негізгі вал қуатына Р нег. Қатынасына тең)
жалпы =
Осыған сай, талап етілетін электродвигатель қуаты мынаған тең болады
Р нег. =Р дв(расч) =
квт.
Негізгі валдың айналу жиілігі мынаған тәуелді анықталады
жет =
нег . И ор ,
Мұндағы -
жет - приводтың жетектегі валының айналу жиілігі
И ор - приводтың берілу санының жобаланған мәні.
Приводтың жетектегі валының айналу жиілігі мына формула бойынша анықталады.
жет = 87 об /мин. Мұндағы привод жетектегі валының бұрыштық жылдамдығы,
Приводтың берілу санының жобаланған мәні редуктор мен цепті берілістің - берілу сандарының туындысына тең.
И жоб. =И ред . И цп ,
мұндағы И ред - редуктордың берілу саны,
И цп -цепті берілістің берілу саны .
нұсқалары бойынша берілу сандарының мәндерін қабылдаймыз:
И ред =4, И цп =4.
И ор арналған формулаға осы мәндерді қоя отырып, мынаны аламыз:
И ор =И ред . И цп =4
4=16
ал негізгі валдың айналу жиілігі
нег =
жет . И жаб =87
16=1392 айн/мин тең болады.
Негізгі валдың Р нег = 6, 8 квт қуатына және негізгі валдың
нег = 1392 айн/мин айналу жиілігіне сай сериясы 4А - 3 фазалы асинхродты қысқатұйықталған электродвигательді таңдаймыз. Двигатель маркасы 4А 132 S4, қуаты Р дв =7, 5 квт және ротордың айналу жиілігі
нам =1455айн/мин.
1. 3 Приводтың жалпы берілу санын анықтау және оны берілістер бойынша бөлу.
Электродвигательдің айналуының номиналды жиілігі бойынша берілу санын нақтылайық
И жал =
бірдей берілу сандар қатарынан редуктор мен цепті беріліс берілу сандарының мәндер, қабылдай отырып И ф ред =4, И ф цп =4, , приводтың нақты берілу санын анықтаймыз
И нақты =И ф ред . И ф цп =4
4=16
Приводтың берілу санының ауытқуы

Ауытқудың бұл мәні рұқсат етілген болып табылады.
1. 4 Редуктор валдарының айналым моменттерін және айналу жиілігін анықтау.
1. 4. 1. Электродвигательдің айналуының номиналды жиілігіне тең редуктор негізгі валының айналу жиілігі
1. 4. 2. Цепті берілісті негізгі валдың айналу жиілігіне тең редуктордағы жетектегі валының айналу жиілігі
1. 4. 3. Приводтың жетектегі валының нақты айналу жиілігіне тең цепті берілістің жетектегі валының айналу жиілігі
1. 4. 4. Жетектегі валдың нақты бұрыштық жылдамдығы
1. 4. 5. Приводтың жетектегі валындағы айналу моменті
1. 4. 6. Цепті берілістің жетектегі валының айналу моментіне тең редуктордың жетектегі валындағы айналу моменті Т 2
1. 4. 7. Редуктордағы негізгі валындағы айналу моменті Т 1
1 таблицада редукторды есептеуге қажет параметрлер келтірілген.
- Тістердің байланыс және майысу (үгілу) төзімділігін есептеу үшін мүмкін болатын кернеуді (ауыртпалықты) анықтау.
2. 1 Тістердің беткі жағындағы қаттылық, термоөңдеу және тіс дөңгелектері материалдарын таңдау
Тапсырмада беріліс габариттеріне қатысты ерекше талаптар болмағандықтан, тісті дөңгелектерге орта механикалық мінездемедегі материалды таңдаймыз - 45 қалайы НВ<350 қаттылықпен, термоөңдеу - жақсартылған. Дөңгелектердің жұмыс істеу қабілетін күшейту үшін шестерняға Бринель бойынша - НВ 1 = 280 қаттылқты аламыз, ал дөңгелек үшін 30 бірлікке аз - НВ 2 = 250 (9) . Дөңгелек материалы төзімділігінің шектеуі -
МПа, өткізгіштігі шектеулі
2. 2 Мүмкін болатын байланыс кернеуін (ауыртпалығын) анықтау.
Мүмкін болатын байланыс куернеуі мынаған тәуелді анықталады
Мұндағы, - ауыртпалық циклдерінің базалық санына сәйкес келетін, тістердің беткі жағының байланыс төзімділігінің базалық шектеуі
S н -қауіпсіздік коэфиценті,
К н -ұзақтылық коэфиценті
НВ
350 болғандағы тістердің төзімділігінің базалық шектеуі (9) формуласы бойынша табылады.

Сәйкесінде, шестерня үшін -
= 630Мпа дөңгелек үшін-
= 2. 250+70=570Мпа
Қауіпсіздік коэфиценті S н =1, 1
тең дейміз.
Тістердің байланыс төзімділігіне әсер ететін қызмет ету мерзімі мен жұмыс режимін ескере отырып есептелетін ұзақтылық коэфиценті мынаған тәуелді анықталады
К нь =
(4)
Мұндағы,
-ауыртпалық циклдерінің базалық саны.
-ауыртпалық циклдерінің нақты саны(тұрақты ауырлық түсіру режимінде)

мұндағы п-
анықталатын дөңгелек үшін айналу жиілігі.
t-t=2 тең, қызмет ету мерзіміндегі беріліс жұмысының сағаттар саны .
және t мәндерін қоя отырып, мыналарды аламыз:
- шестерня үшін
- дөңгелек үшін
Ауыртпалық циклдерінің базалық саны тістердің жұмыс істеу бетінің қаттылығына тәуелді және ол құрайды (9) : шестерня үшін, дөңгелек үшін
2 =16. 10 6 .
(4) формулаға
және
мәндерін қоя отырып, мынаны аламыз:
-шестерня үшін
=
=0, 49
- дөңгелек үшін
=
=0, 58
K Hq1 <1 және K Hq2 <1 болғандықтан және мәндерін қабылдаймыз.
(3) формулаға параметрлердің табылған мәндерін қосып, дөңгелек пен шестерня үшін мүмкін болатын ауыртпалықты табамыз:
Мпа,
Мпа.
Тістер қаттылығының аз ғана айырмашылығы бар цилиндрлі тіктісті және жалпақтісті берілістер үшін
және
мәндерінен кіші мәндер қабылдануы тиіс. Сонымен, мүмкін болатын байланыс кернеуі
2. 3 Мүмкін болатын майысу (үгілу) кернеуін ( ауыртпалығын) анықтау.
Тәуелді үгілудің (қажалуың) мүмкін болатын кернеуі
мұндағы- тістердің қажалу төзімділігінің базалық шектеуі.
S F - қауіпсіздік коэфиценті
KFL - Ұзақтылық коэфиценті
KFC - Ауыртпалықтың екіжақты қосымша сының әсер ету коэфиценті
Қаттылығы HB < 350 болатын дөңгелектер үшін тістердің қажалау төзімділігінің базалық шектеуі (9) тәуелді ан- ды.
 =260+HB,
=260+HB,
- шестерня үшін=260+280=540 МПа
- дөңгелектер үшін=260+250=540 МПа
Қауіпсіздік коэфицентін S F =2 деп аламыз.
Ауырпалықтың біржақты әсер етуі кезінде K FC =1. формуласы бойынша ұзақтылық коэфиценті ан - ды. K FL =

(6)
мұндағы, NFo - ауыртпалық циклдерінің базалық саны, барлық қалайы үшін NFo=4. 10 6
N F ауыртпалық циклдерінің нақты саны
Tұрақты ауырлық түсірудегі ауыртпалық циклдерінің нақты саны
N F =N H =60. п. t
шестерня үшін - N F1 =60. п. t =60. 1455. 2000=1, 746. 10 9
дөңгелек үшін - N F2 =60. п. t =60. 363, 8. 2000=0, 437. 10 9
(6) формулаға N F және NFo мәндерін қоя отырып, мынаоларды аламыз
- шестерня үшін
=
=0, 36
- дөңгелек үшін
=
=0, 46
K FL1 <1 Және K FL2 <1 болғандықтан K FL1 <1 және K FL2 <1 мәндерін қабылдаймыз.
(5) формулаға параметрлердің смәндерін қоя отырып, мүмкін болатын қажалу ауыртпалығын табамыз.
-шестерня
Мпа,
- дөңгелек үшін
Мпа,
3. Тісті беріліс есебі
3. 1 . Тісті берілістің жобалық есебі
Тісті берілістің жобалық есебі тістердің байланыс төзімділігінен келіп шығады. Тістердің беткі жақтарының тозуына әкеп соқтыратын тістердің өз уақытынан бұрын жұмыс істеу қабілетінен айрылуының алдын - ала тісті дөңгелектердің сәйкес өлшемін анықтау - басты мақсат болып табылады.
Алдымен жалпақтісті берілісті қарастырайық өйткені ол тіктісті беріліске қарағанда бірқатар артықшылықтарға ие: габариттердің төмендетілуі, дөңгелектер жұмысының ағымдылығы, дыбыстың азайтылуы, ауыр түсіру көлемінің көбейтілуі, осьаралық қашықтықтың қамтамасыз етілуі.
3. 1. 1. Алдын - ала болжанған осьаралық қашықтық
 тәуелді анықталады:
тәуелді анықталады:
 , (7)
, (7)
Мұндағы, K a жалпақтісті беріліске тең коэфицент K a =430 МПа 1/3
И - редуктордың берілу саны
Т 2 - дөңгелек валындағы айналу моменті Т 2 =168 Н. М
 - мүмкін болатын байланыс кернеуі
- мүмкін болатын байланыс кернеуі
 =518 МПа
=518 МПа
 =bw/aw - тісті дөңгелек венцасының ені коэфиценті рұқсат етілетін мәндері
=bw/aw - тісті дөңгелек венцасының ені коэфиценті рұқсат етілетін мәндері
 =0. 25; 0, 315; 0, 4; 0, 5; 0, 63 (8)
=0. 25; 0, 315; 0, 4; 0, 5; 0, 63 (8)
К НВ - тісті дөңгелектің венцасы еніне ауыртпалықтың дұрыс бөлінбеу коэфиценті
 деп алып,
деп алып,
 =0, 5. 0, 4(4+1) 1 табамыз
=0, 5. 0, 4(4+1) 1 табамыз
Ауыртпалықты бөлудің теңсіздік коэфиценті дөңгелектердің тіреуге қатысты симметриялық орналасқанына қарамастан, жоғарыда ұсынылғанына қарап таңдаймыз.
К НВ =1, 25 мәнін, дөңгелектердің симметриялық емес орналасқан жағдайында аламыз.
(7) формулаға параметрлердің мәндерінқоя отырып, осьаралық қашықтықтың алдын - ала есептеген мәнін табамыз:
 , мм
, мм
Негізгі параметрлердің бірыңғай қатарларындағы мәнге алынған aw-ды жуықтатсаң, aw=112 мм екенін көреміз. Осы көрсеткіш осьаралық қашықтықтың нақты мәні болып табылады.
3. 1. 2. Тісті венцаның енінің, дөңгелектің және шестернияның бастапқы сыртқы ауданының диаметрлерін анықтаймыз.

Dw=

bw=

(8) негізгі параметрлердің бірыңғай қатарындағы мәнінің біреуіне жуықтатсақ (яғни мәні ең жақыны), bw=45 мм екенін көреміз
3. 1. 3. Тісті венцалардың ені және шестерня ені (жинақтаудың ( құрастырудың ) нақты болмауынан шестерня валы дөңгелек валына қатысты орын ауыстырғанда (қозғалысында) тістердің жұмыс істейтін ұзындықтары мәніне тең болу мақсатында шестерня ені кеңірек болып жасалынады)
b 2 =bw=45мм
b 1 =b 2 +5мм=45+5=50мм.
3. 1. 4. Тістердің қалыпты модулі эмпирикалық тәуелділікке байланысты анықталады.
m n =(0, 01……. 0, 02) . aw, немесе m n =(0, 01……. 0, 02) . 112=(1, 12…. . 2, 24) мм
ГОСТ 9563-60 бойынша m n =2мм деп қабылдаймыз.
(8) байланысты тістердің суммалық саны анықталады
 ,
,
мұндағы,
 - тіс линиясының бұрыштық иілуі
- тіс линиясының бұрыштық иілуі
ұсыныстар бойынша бұрышты
 десек, мынаны тауып аламыз
десек, мынаны тауып аламыз

Ең жақын бүтін санға дөңгелектей отырып
 екенін білеміз.
екенін білеміз.
Шестерня Z 1 мен дөңгелек Z 2 тістерінің саны
Z
1
=


Берілу санының нақты мәні:
U
ф
Қабылданған мәнмен сай келеді, және де берілу санының ауытқуын U=0%
3. 1. 6. Тістің бұрыштық иілуінің нақтыланған мәні


3. 1. 7. Шестерня мен дөңгелектердің диаметрлерін анықтаймыз.
Бөлу диаметрлері



Тістердің ұштарының диаметрлері

d a1 =d 1 +2. h* a . m n =44, 8+2. 1. 2=48, 8мм
d a2 =d 2 +2. h* a . m n =179б2+2. 1. 2=183б28мм
мұндағы, һ * а - алғашқы контурдағы тіс бас жағының биіктік коэфиценті, ГОСТ 13755-81 бойынша һ * а =1
шұңғыма диаметрлері
dв
1
=d
1
-2
 мм
мм
dв
2
=d
2
-2
 Equation. 3 мм
Equation. 3 мм
мұңдағы, С * - радиалды зазор коэфиценті, ГОСТ 13755 - 81 бойынша С * =0, 25 мм
осьаралық бөлу қашықтығы a=0, 5(d
1
+d
2
) =0, 5
 мм, бұл aw=112мм мәнімен сай келеді, есептеу дұрыс орындалды.
мм, бұл aw=112мм мәнімен сай келеді, есептеу дұрыс орындалды.
3. 1. 8. Байланысу (зацепление) нүктесіндегі дөңгелек айналуының бетінің жылдамдығы

(9) Нұсқамалары бойынша 9-В (ГОСТ 1643 - 81) тісті дөңгелектерді таңдау дұрыс болып табылады.
3. 2. Тісті берілісті тексеру есебі.
3. 2. 1. Тісті берілісті тістердің байланыс төзімділігіне тексеру есебі.
Жобалы тексеру мақсатында есептелініп отыр. Әсер етіп отырған байланыс кернеуі
 тәуелді анықталады
тәуелді анықталады
Мұндағы, К - К=270 жалпақтісті беріліске тең коэфициент. Басқа параметрлер жоғарыда келтірілген.
 арналған формулаға параметрлер мәнін қоя отырып, мынаны табамыз
арналған формулаға параметрлер мәнін қоя отырып, мынаны табамыз
Және де бұл мән мүмкін болатын мәндер қатарына жатады.
3. 2. 1 иілу кернеуі мына формула бойынша табылады,
 ,
,
мұндағы,
 F
F
 - тіс венцасының ені бойынша ауыртпалық бөлінуінің теңсіздік коэфиценті, K
F
- тіс венцасының ені бойынша ауыртпалық бөлінуінің теңсіздік коэфиценті, K
F
 =1, 1
=1, 1

J F - тіс формасы коэфиценті, тістердің эквивалентті санына тәуелді жалпақтісті беріліс үшін;
Шестерня мен дөңгелек тістерінің эквивалентті саны



Тістердің эквивалент санының табылған мәндері үшін
Шестерня мен дөңгелек үшін тіс формасының коэфицентіне мүмкін болатын кернеу иілісінің қатынастарын табамыз

Тіс формасы коэфицентіне кернеу ең аз түсетін дөңгелекті табу үшін бұл есептеу жүргізіледі.
 болғандықтан, есептеу шестерня үшін жүргізіледі.
болғандықтан, есептеу шестерня үшін жүргізіледі.
(8) формуласына параметрлер мәндерін қойып шестерня тістерінің иілу кернеуін анықтаймыз
 МПфа
МПфа
Төзімділік (қаттылық) шарты орындалды, өйткені
 МПа
МПа
3. 3. Тісті берілістің геометриялық параметрлерін анықтау.
Байланыс және иілу кернеулеріне төзімділік шарттары орындалғандықтан, (1) тәуелділіктері бойынша тісті берілістің қалған парметрлерін табайыық.
Зацепление бұрышы алғашқы контур профилінің бұрышына тең.

мұндағы,
 - басстапқы контур профилінің бұрышы, ГОСТ 13755 - 81 бойынша
- басстапқы контур профилінің бұрышы, ГОСТ 13755 - 81 бойынша

Тістердің негізгі қалыпты қадамы
 мм
мм
Тістердің негізгі беткі бөлу қадамы
 мм
мм
Тістердің негізгі қалыпты қадамы P
b
=П

Тістердің осьтік қадамы

Тіс линияснының негізгі иілу бұрышы
 . (Торцовый) жабудың коэфициенті
. (Торцовый) жабудың коэфициенті

мұндағы
 шестерня тісінің профилінің бұрышы,
шестерня тісінің профилінің бұрышы,
 =arcos(d
b1
/d
a1
) =arccos (42, 008/48, 8) =30, 591
0
/d
b1
шестерня негізгі бетінің диаметрі, d
b1
=d
=arcos(d
b1
/d
a1
) =arccos (42, 008/48, 8) =30, 591
0
/d
b1
шестерня негізгі бетінің диаметрі, d
b1
=d
 мм
мм
 а2-дөңгелек тісі профилінің бұрышы
а2-дөңгелек тісі профилінің бұрышы

(db2-дөңгелек негізгі бетінің диаметрі, d b1 =d 1 . cosd=179, 2. cos 20, 334 0 =168, 033мм)
Мәндерді орындарына қойып, алатынымыз
 Осьтік жабу коэфициенті
Осьтік жабу коэфициенті
Тісті берілісті жабу коэфициенті

3. 4. Ілініс нүктесіндегі күшті анықтау.
2 - суретте дөңгелектер ілінісіндегі күштің әсер етуінің схемасын көрсетілген. Дөңгелектердің өзара әсер етуінің қалыпты тістер профиліне бағытталған, F п2 =-Fп1 жағдайында. F п күшін мынадай бөліктерге бөлуге болады;
F t бастапқы бетке жанама бағытталған беткі күш. Негізгі валда Ft2 күші айналуға қарсы бағытталған, ал жетектегі валда F t2 дөңгелек айналымына сай бағытталған, F t2 =-F t1 -жағдайында.
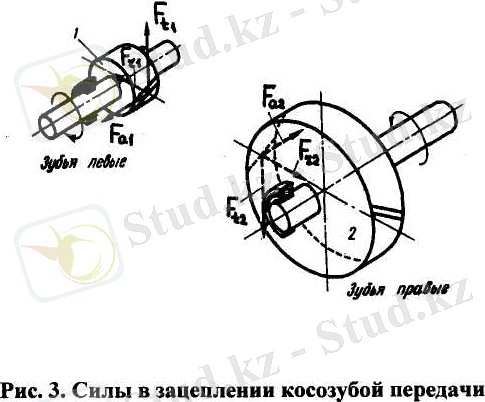
F ч -радиус бойынша дөңгелек центріне бағытталған радиалды күш. Ғ ч2 =-F ч1
Тағы да, Жалпақтісті берілісте Ғ аг =-F а1 осьтік күші дөңгелек осьтеріне паралель бағытталған негізде жұмыс жасайды.
2-суретте:Т 1 , Т 2 -айналу моменттері; dw1-шестерняның бастапқы бетінің диаметрі, d1бөлу диаметріне тең. db1-шестерняның негізгі бетінің диаметрі. -da1-шестерня тістері шыңдары беттерінің диаметрі. dw-ілініс бұрышы, dw=dtw=d1.
Беткі ( тангенциалды) күш

радиалды күш F

(1) Осьтік күш.
F

Тіс мениясы бағытын, күші бағытын анықтайтын дөңгелектердің айналу бағытына -осьтік күшінің бағыты тәуелді болып табылады.
Тістердің сол жақ линиясын шестерня үшін, оң жақ линиясын дөңгелек үшін алсақ «3-суретте осьтік күштердің бағыты көрсетілген. »
2 кестеде тісті берілістің негізгі параметрлері келтірілген.
Тісті берілістің негізгі параметрлері

Валдың айналу жиілігі, айн/мин
-жетектегі
-негізгі
п 2
п 1
363, 8
1455
Тістер саны
-шестерня
-дөңгелек
22
88
Тістердің жұмыс істеу бетінің қаттылығы
-шестерня
-дөңгелек
280
250
Тістер линияларының бағытталуы
-шестерня үшін
-дөңгелек үшін
Бөлу беттерінің диаметрлері, мм
-шестерня үшін
-дөңгелек үшін
44, 8
179, 2
Тіс венцасының ені мм
-шестерня үшін
- дөңгелек үшін
50
45
Ілініске әсер ететін күштер, Н
-беткі,
-радиалды,
- осьтік,
1875
695
359
- Эскизді құрылымын жасау
Редуктордың эскизді құрылымы 2 кезеңде жасалады. Бірінші кезеңде корпустағы бөлшектердің орналасуы айқындалады; бөлшектер диаметрлері, тіреудің орналасқан жері және дөңгелек пен тіреу арақашықтығы анықталады.
Ал екінші кезеңде корпус, подшипник түйіндері, валдар және дөңгелектер құрылымы жасалады.
Эскизді құрылымның бірінші кезеңінің ретіиен жасалуы (4 суретті қара) .
4. 1. табылған осьаралық қашықтық бойынша валдардың осьтерін енгіземіз.
4. 2. Диаметрлері -және- ендері болатын тісті дөңгелектердің контурын валдар осьтерінде сызамыз.
4. 3. Дөңгелек тістерінің шыңдарынан және шестерня (торцов) мм қашықтықта, ал шестерня тістерінің шындарынан корпустың ішкі қабырғаларына дейін
 мм аралықта корпустың қабырғасының ішкі көрінісін белгілейміз.
мм аралықта корпустың қабырғасының ішкі көрінісін белгілейміз.
4. 4. Валдардың жеке сатыларының диаметрлерін анықтаймыз.
... жалғасыСіз бұл жұмысты біздің қосымшамыз арқылы толығымен тегін көре аласыз.
- Іс жүргізу
- Автоматтандыру, Техника
- Алғашқы әскери дайындық
- Астрономия
- Ауыл шаруашылығы
- Банк ісі
- Бизнесті бағалау
- Биология
- Бухгалтерлік іс
- Валеология
- Ветеринария
- География
- Геология, Геофизика, Геодезия
- Дін
- Ет, сүт, шарап өнімдері
- Жалпы тарих
- Жер кадастрі, Жылжымайтын мүлік
- Журналистика
- Информатика
- Кеден ісі
- Маркетинг
- Математика, Геометрия
- Медицина
- Мемлекеттік басқару
- Менеджмент
- Мұнай, Газ
- Мұрағат ісі
- Мәдениеттану
- ОБЖ (Основы безопасности жизнедеятельности)
- Педагогика
- Полиграфия
- Психология
- Салық
- Саясаттану
- Сақтандыру
- Сертификаттау, стандарттау
- Социология, Демография
- Спорт
- Статистика
- Тілтану, Филология
- Тарихи тұлғалар
- Тау-кен ісі
- Транспорт
- Туризм
- Физика
- Философия
- Халықаралық қатынастар
- Химия
- Экология, Қоршаған ортаны қорғау
- Экономика
- Экономикалық география
- Электротехника
- Қазақстан тарихы
- Қаржы
- Құрылыс
- Құқық, Криминалистика
- Әдебиет
- Өнер, музыка
- Өнеркәсіп, Өндіріс
Қазақ тілінде жазылған рефераттар, курстық жұмыстар, дипломдық жұмыстар бойынша біздің қор #1 болып табылады.

Ақпарат
Қосымша
Email: info@stud.kz