Таратылған басқару жүйелері және ТП АБЖ: құрылымы, деңгейлері мен функциялары, GPRS арқылы деректер жинау

Жұмыс түрі: Дипломдық жұмыс
Тегін: Антиплагиат
Көлемі: 65 бет
Таңдаулыға:
Кіріспе
Таратылған басқару жүйесін (DCS - Distributed Control System) кеңістікте әр жерге таратылған бір бірінен тәуелсіз көптеген құрылғылардан тұратын және ортақ тапсырманы орындау үшін қызмет етіп, өзара әрекеттесетін жүйе деп қарастыруымызға болады. Бұл жүйені қолдану түрлі құрылғылардың көбеюінің есебінен орын алады. Яғни әр аймақта таратылған контроллер және кіріс-шығыс құрылғыларының жүйесінен құралады. Сондай-ақ әр контроллер өз тобындағы құрылғылармен әрекеттесіп өзіне тиесілі тапсырманы орындайды.
Барлық жерде жылуды есепке алу құрылғыларын орнату үлкен басымдылыққа ие бағыттарының бірі болып табылады. Алайда есеп алу құрылғыларын орнатуды жүргізгеннен кейін ол құрылғылардан жедел түрде әрі реттелген түрде ақпарат жинап отырудың қажеттігі туындайды. Әдетте мәселе он немесе он бес жылуды есепке алғыштардан ақпарат алу қиындықтар туғызбайды. Қазіргі кезде көптеген мамандар қызмет ететін құрылғылардың көбеюіне байланысты қиындықтар туындауда. Бұл өз кезегінде ақпаратты автоматты түрде жинауды ұйымдастыруды қажет етеді. Диспетчерлік қызмет те жылумен қамту жүйесінде талқыға салынатын мәселе болып қалып отыр. Осы қиындықтарды шешу мақсатында өте тиімді болып саналатын байланыс құралдары арқылы құрылылардан қажетті ақпаратттарды тез әрі дәл сол уақыт мезетінде дәл мән алуға мүмкіндік туындап отыр. Дәлірек айтқанда мобильді интернет негізіндегі GPRS технологиясын қолдану жұмысты жеңілдетіп, шығын азайта түседі.
Іс жүзіндегі GSM желілері арқылы жоғары жылдамдықпен деректемелерді тарату үшін GPRS (General Packet Radio Service) технологиясы, яғни радиоарна бойынша дестелік тарату қызметі әзірленді. GSM-де бар GPRS технологиясы TDMA негізіндегі радиоинтерфейсті деректерді жоғары жылдамдықпен тарату үшін қолданады және үшінші буынды жүйелерді құру үшін аралық қадам болып табылады. GPRS технологиясын қолдайтын жүйелер 2G+ деген атауға ие болды. GPRS-тің базалық спецификацияларын ETSI 1998 жылы деректердің дестелік радиотаратуын жүзеге асыратын GSM фаза 2+ стандартты технологиясы ретінде қабылданды. Шетелдік және отандық ақпарат құралдары GPRS желісінің жалпы ұйымдастырылуымен, желінің негізгі құраушыларын және олардың функцияларын сипаттаумен, физикалық және логикалық арналарды ұйымдастырумен, GPRS хаттамаларының құрылымымен, дестелік таратуды активациялайтын процедуралармен, ішкі желілік адресациямен, GPRS хаттамалық стегінің әр түрлі деңгейдегі деректердің хаттамалық блогын ұсыну форматтарымен, биллингпен және т. б байланысты GPRS технологиясының әр түрлі жақтарын көрсетеді.
1 Автоматты басқару жүйелірінің құрылу қағидалары, мақсаты мен міндеті
1. 1 ТП АБЖ қолданудың мақсаты:
- жабдықтың жұмыс режимін белгіленген критерилерге сәйкес үйлесімділеу; (мысалға, отынды аз шығындау арқылы талап етілген сападағы өндірістік буды алу) ;
- ауыр физикалық және жүйкелік жұмыс мөлшерінен адамды босату;
- ТБО-ң қауіпсіз жұмысын қамтамасыз ету;
- басқару сапасын арттыру арқылы жабдықтың тозуын азайту.
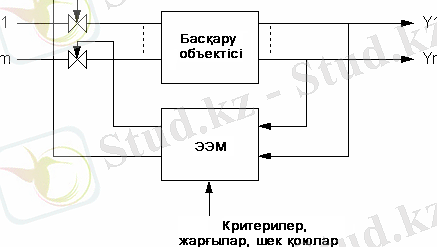
1. 2 ТП АБЖ құрылымыАвтоматтандыру жүйесінің құрылымдық сызбасы жалпы түрде 1-суретте көрсетілген. Автоматтандыру жүйесі автоматтандыру объектісінен және осы объектіні басқару жүйесінен құралады. Автоматтандыру объектісі мен басқару жүйесінің арасындағы белгілі әрекеттестік арқасында, автоматтандыру жүйесі, х 1 , х 2 , . . . , х n параметрлерімен сипатталатын объект жұмысының талап еткен нәтижесін толығымен қамтамасыз етеді.
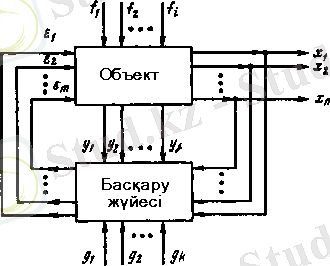
Сурет 1. 1 Автоматтандыру жүйесінің құрылымдық сұлбасы
Бұл параметрлерге мысалы, технологиялық процестің мақсатына сәйкес соңғы өнімін сипаттайтын шамаларды, технологиялық процестердің жүрісін, оның тиімділігін анықтайтын, апатсыз режимді қамтамасыз ететін және т. б. жеке параметрлерді жатқызуға болады.
Бұл негізгі параметрлерден басқа, автоматтандырудың құрама объектісінің жұмысы y 1, y 2 , . . . , у j қосалқы параметрлермен сипатталады. Олар сондай-ақ, бақыланып және реттеліп отыруы қажет (мысалы, тұрақты болу) . Мұндай параметрлерге мысалы, технологиялық бу мен сығылған ауа дайындау қондырғыларының, айналма сумен жабдықтау сорап станциясының жұмысын сипаттайтын шамаларды жатқызуға болады.
Бұл қондырғылардан тек технологиялық қондырғының кірісіне шикізат пен белгіленген параметрлі энергия тасымалдаушыны жіберу талап етіледі. Сонымен қатар шикізат пен энергия тасымалдаушылардың қажетті мөлшерін жіберу технологиялық қондырғыға жатқызылатын басқару құралдарымен іске асады.
Жұмыс барысында объектке, х 1 , х 2 , . . . , х n параметрлерінің талап етілген мәндерден ауытқуын болдыратын, f 1 , f 2 , . . . f i ауытқу әсерлері келіп түседі. Ағымдағы х 1 , х 2 , . . . , х n және y 1, y 2 , . . . , у j мәндері жайлы ақпарат басқару жүйесіне келіп түседі және g 1 , g 2 , . . . , g k алдын-ала жазылған мәндермен салыстырылады. Нәтижесінде басқару жүйесі шығыс параметрлерінің ауытқуларының орнын толтыру үшін, ε 1 , ε 2 , . . . , ε m басқарушы әсерлерді өңдеп шығарады.
Сонымен, автоматтандыру объектісі жалпы жағдайда бірнеше басқару бөлімшесінен құралады. Басқару бөлімшелері жеке қондырғылар, агрегаттар және т. с. с. түрінде немесе бірдей қондырғылардың, агрегаттардың жеке параметрлерін басқарудың жергілікті каналы түрінде көрсетілуі мүмкін.
1. 3 Құрылымына байланысты ТП АБЖ бөлінеді1. бірдеңгейлі бір орталыққа бағындырылған ТП АБЖ - объектті басқару бір басқару пунктінен жүзеге асатын бірдеңгейлі жүйелер.
2. бірдеңгейлі бір орталыққа бағындырылмаған (таратылған) - күрделі объекттің жеке бөліктері жеке басқарушы құрылғылармен (контроллермен, ЭЕМ, қосымша аспаптармен) дербес басқару пунктінен басқарылатын бірдеңгейлі жүйелер.
3. көпдеңгейлі
Бірдеңгейлі бір орталыққа бағындырылған және бірдеңгейлі бір орталыққа бағындырылмаған жүйелердің құрылымдық сызбалары 2-суретте көрсетілген. Онда тілшемен басқару объектісінен басқару жүйесіне және жүйенің басқарушы әсерлерінен басқару объектісіне ақпаратты жеткізудің тек негізгі ағымдары көрсетілген. 2-суретте БП1 - БП3 пункттерінен сәйкес басқарылатын, күрделі басқару объектісінің жеке бөліктері үзік сызықтармен бөлінген.
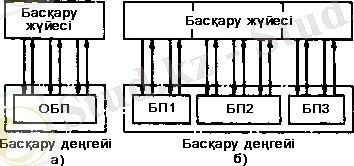
Сурет 1. 2 Бірдеңгейлі басқару жүйесінің мысалдары:
а - бір орталыққа бағындырылған жүйе, б - бір орталыққа бағындырылмаған жүйе
Бірдеңгейлі бір орталыққа бағындырылған жүйелер негізінен біршама күрделі емес объектілерді немесе шағын территорияда, технологиялық жабдықтарымен ықшам орналасқан объектілерді басқару үшін қолданылады. Көптеген өндірістік объектілер қазіргі таңда жеке бөліктері бір-бірінен біршама қашықтықта орналасқан күрделі кешендер болып келеді.
Объектілерде негізгі технологиялық қондырғылардан басқа көптеген қосымша қондырғылар-бағыныңқы объектілер (өндірістік қазандық, компрессорлық, айналма сумен жабдықтау сораптық станциялар, қазандық-утилизаторлар, тазарту құралдары және т. б. ) бар. Олар технологиялық қондырғыларды барлық энергия түрлерімен қамтамасыз ету үшін, және де технологиялық процестің қалдық өнімін пайдаға асыру және залалсыздандыру үшін қажет.
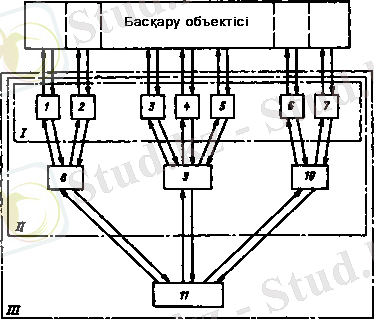
Сурет 1. 3 Үшдеңгейлі басқару жүйесінің мысалы: I- III - басқару деңгейлері
Егер осындай кешенді объекттің басқаруын бірдеңгейлі бір орталыққа бағындырылған жүйе бойынша құрса, онда басқару жүйесінің қатынасы біршама қиындайды, яғни оның құрылысы мен пайдаланылуына кететін шығын бірден өседі, орталық басқару пункті қолайсыз болып шығады. Ақпаратты қайтадан өңдеу үлкен қиыншылықтар әкеледі, оның үлкен бөлігі технологиялық процесті тікелей басқару үшін қажетсіз болып табылады. Басқару пунктінің осы немесе басқа қосымша бағыныңқы объекттен алыстығы, түрлі ақауларды жою үшін қолданылатын шараларды қиындатады. Бұл жағдайда көбінесе бірдеңгейлі бір орталыққа бағындырылмаған басқару жүйесі тиімді болып келеді.
Дегенмен, бірдеңгейлі жүйелердің көмегімен технологиялық процестерді басқару сұрақтарын әрқашан қолайлы шешу мүмкіндігі бола бермейді. Бұл алдымен күрделі технологиялық процестерге қатысты. Онда көпдеңгейлі басқару жүйелеріне ауысу пайдалырақ болады. Мысал ретінде 3-суретте қондырғыларының арасында тармақталған технологиялық байланысы бар күрделі объектінің үшдеңгейлі басқару жүйесі көрсетілген. Жеке технологиялық қондырғылар бір орталыққа бағындырылмау арқылы 1-7 басқару пунктерінен басқарылады. Бұл басқарудың бірінші деңгейі. Осыған сәйкес 1-7 пунктерінен елеулі технологиялық байланысы бар объектілер басқарылады. Осыған байланысты қондырғылардың ең жауапты реттелуші параметрлері 8-10 басқару пунктеріне, басқарудың екінші деңгейіне беріледі. Объекттің технологиялық процесін жалпы анықтайтын негізгі параметрлер үшінші деңгейдің басқару пунктінен басқарыла және бақыланыла алады.
Жобалау кезінде бірінші деңгей үшін әдетте үш басқару режимін қарастырады
- үлкенірек рангтің деңгейінен келіп түсетін командалар;
- тікелей бірінші деңгейде құрылатын командалар;
- үлкенірек рангтің деңгейінен келіп түсетін және тікелей бірінші деңгейде құрылатын командалар.
Екі және одан жоғары ранг деңгейінің төрт жұмыс режимі болуы мүмкін:
- берілген i-ші рангтің аппаратурасы (i + 1) -ші ранг командасының басқарылатын әсерлерін қабылдайды және жүзеге асырады;
- командалар тікелей i-ші ранг аппаратурасында құралады;
- i -ші рангтың барлық басқару функциялары (i-1) -ші ранг аппаратурасына беріледі;
- командалардың бір бөлігі i-ші ранг аппаратурасына (i+l) -ші рангтан келіп түседі, келесі бөлігі i-ші рангте құралады, ал басқару функциясының бір бөлігі (i-1) -ші ранг аппаратурасына жіберілген.
i-ші ранг аппаратурасында айқын сигнал беру жүйесі бар үш жағдайдағы режимдердің аппараттық және бағдарламалық айырып-қосқыштары болуы қажет.
Аппаратураны 1-режимнен 2-режимге ауыстыру жоғарғы ранг жүйесінің операторының келісімі немесе командасы арқылы жүзеге асады.
Басқару функциясын төменгі рангтың параметрлеріне жіберу тек жіберу туралы команданың қабылдауынан және төменгі ранг жүйесінің операторының, басқарудың басқа функцияларын (командаларды құру) қабылдауға дайын екендігі жайлы келісімінен кейін жүзеге асады.
Басқару жүйесінің көпдеңгейлі құрылымы оның сенімділігін, жылдамдығын, жөндеуге жарамдылығын қамтамасыз етеді. Сонымен бірге басқаруды бір орталыққа бағындырудың қолайлы деңгейі, технологиялық бақылау, басқару құралдарының және олардың арасындағы байланыс сызығының аз мөлшерімен таңдалады. Дегенмен көпдеңгейлі ТП АБЖ, бірдеңгейлілермен салыстырғанда, бағдарламалық қамтамасыз ету мен аппараттық құралдардың бағасының жоғарылығымен, түрлі құрылғылардың жұмысының үйлесімділігі мен жөндеуінің күрделілігімен ерекшеленеді.
1. 4 ТП АБЖ басқару деңгейінің саны мен сипатына қарай 1, 2 және 3-класс деңгейлеріне бөлінеді
- ТП АБЖ 1-класына («төменгі» деңгейлі ТП АБЖ) басқару объектісінің күйі жайында тікелей датчиктер мен түрлендіргіштерден ақпарат алатын және өндірістің қондырғылары мен агрегаттарын тікелей басқаратын ТП АБЖ жатады. «Төменгі» деңгейлі ТП АБЖ құрамында басқа ТП АБЖ болмайды.
- ТП АБЖ 2-класына («жоғарғы» деңгейлі ТП АБЖ) жеке агрегаттарда (қондырғылар) ТП АБЖ 1-класымен жабдықталмаған жергілікті басқару жүйелері (мысалы, контоллер негізінде немесе қосымша аспаптар негізінде бірконтурлы басқару жүйесі) бар қондырғылар тобын, технологиялық сызықтарды, бөлімшені басқаратын ТП АБЖ жатады.
- 3-класқа (көпдеңгейлі ТП АБЖ) өзінің құрамында ТП АБЖ 1, 2-кластарын біріктіретін және жеке технологиялық қондырғыларды немесе олардың жиынтығын (цех, өндіріс) келісіп басқаруды жүзеге асыратын ТП АБЖ жатады.
ТП АБЖ функциялары
Автоматтандыру функцияларын үш топқа бөлуге болады:
-ақпараттық;
-басқарушы;
-қызметтік.
Ақпараттық функциялар:
- Өлшеу
а) Тура өлшеу: қабылдау, бастапқы өңдеу. Бастапқы өңдеуге сигналды тұрақтандыру, сызықтау, ауқымдау, дискреттеу, фильтрлеу, анықтау бақылауы кіреді. Сигналды тұрақтандыру - бастапқы сигналды бірыңғай түрге келтіру (негізгі қатарлар: 0-5мА; 0-20мА; 4-20мА; 0-10мВ; 0-10 В) .
Бастапқы өңдеудің процедуралары аппаратты немесе бағдарламалы түрде орындалуы мүмкін.
б) Жанама өлшеу: тура өлшеуге келмейтін ТБО параметрлерінің есебі мен белгілі үлгі бойынша ( мысалы, деңгейдің өзгерісі бойынша резервуардағы сұйықтықтың азаюын есептеу) басқа параметрлер өлшемімен есептеу.
- Кедергілер мен қорғаныстардың жұмыс істеу сараптамасы.
- Технологиялық қондырғылардың жағдайының диагностикасы.
- Болжам: алдағы кездегі параметрлердің есебі. Қарапайым жағдайда бұл сызықтық экстраполяция.
- Мәліметтер деректерін жазу. Ақпаратты архивтеу және сақтау.
- Деректерді көзбен шолып байқау (экранда, жарықдиодты сызбада ақпараттың бейнеленуі және т. б. ) .
- Көршілес және жрғары тұрған жүйелермен ақпарат алмасу және т. б.
Басқарушы функциялар.
- Технологиялармен белгіленген, берілген аралықтағы айнымалыларды тұрақтандыру.
- Берілген технологиялық бағдарлама бойынша параметрлер мәні мен режимдердің өзгерісі.
- Берілген алгоритм бойынша технологиялық жағдайларға байланысты басқарушы әсерлерді болдыру және жүзеге асыру.
- Технологиялық агрегаттар арасындағы материалдық ағымдар мен жүктемені тарату.
- Агрегаттардың іске қосылуы мен кідірісін басқару.
Жүйелік (қызметтік) функциялар.
- Бағдарламаны диспетчеризациялай (орындалудың жүйелілігі мен реті) .
- Ішкі жүйелік компоненттер (ЖЕСҚ, дербес магнитті дисктегі жинақтауыштар) мен сыртқы құрылғылар (пернетақта, принтерлер, т. б. ) . арсындағы айырбайстау ұйымы.
- Жүйелік компоненттерді сынақтау.
- Келеңсіздіктер мен тоқтап қалудан қорғаныс.
- Апаттық және апат алды жағдайларындағы (операциялық жүйе тоқтап қалған кезде автоматты түрде қайта іске қосу немесе келеңсіздіктер мен тоқтау кезінде жүйенің жұмыс істеу қабілеттілігін қалпына келтіру) жүйенің жұмысына бағытталған процедуралар.
ТП АБЖ жұмыс режимдері
Қазіргі таңда өндірістегі технологияның қиындығымен қатар агрегаттардың бірыңғай өнімділігінің бұлжытпай артуы байқалады. Технологиялық қондырғылардың қуатын арттырумен бірге бақылай және басқару жүйелерінің ақпараттық қуаты да артады. Сондықтан басқару пультіндегі оператор жүздеген технологиялық параметрлердің өзгерісін бірден бақылай алмайды. Мұндай жағдай ЭЕМ-ді қолдану негізіндегі АБЖ қолдануды талап етті.
ЭЕМ-нің ТП АБЖ-гі негізгі жұмыс режимдерін қарастырайық:
Ақпараттық режим.
ЭЕМ-ге басқару объектісінің жағдайы туралы ақпарат, соның ішінде бақыланылатын және басқарылатын шамалардың мәндері енгізіледі. ЭЕМ көмегімен алынған объекті жайындағы деректер дисплейге шығарылады; ТБО жұмыс сапасының көрсеткіштерін есептеуде қолданады; одан ары өңдеу үшін жоғары орналасқан АБЖ-не беріледі. Оператор машина шығаратын ақпаратты қолданып, басқару пультінен технологиялық процесті басқарып отырады.
Бұл режим технологиялық процесті ЭЕМ арқылы тікелей басқаруды жүзеге асыру конструктивті күрделі және экономикалық тиімсіз болған жағдайда, сонымен бірге технологиялық процесте қиын байқалатын өзгешеліктер болған жағдайда қолданылады.

Сурет 1. 4 Ақпараттық режимдегі ТП АБЖ-нің құрылымы
Супервизорлы басқару режимі.
Супервизор - ЭЕМ-нің негізгі бағдарламасының атауы. ТП АБЖ супревизорлы режим жұмысының негізгі артықшылығы - жергілікті реттегіштерді (жергілікті, жеке) ЭЕМ көмегімен автоматты басқару. Мұндай жүйелерде басқару контуры ЭЕМ арқылы тұйықталған және оператордың функциясы жалпы процесс жүрісін бақылау болып қалады. Адамның қатысу сирек, күтпеген (апаттық) жағдайлар пайда болғанда талап етіледі.
Оператордың өзгеру кезіндегі процесс басқарылуына түзетулер енгізуіне мүмкіндігі бар, мысалы, өндіріліп жатқан өнімнің құрамына немесе шикізатына.
Сызба бойынша тұйықталған жүйе жергілікті реттегіштер көмегімен, егер ЭЕМ жұмысын тоқтатса да жұмыс істейтіні көрініп тұр. Реттегіште жарғылардың мәндері айқындалады және ол ЭЕМ-де есептелген соңғы мәнге тең болады. Кейін оператор жарғыларды қолмен басқару арқылы өзгерте алады.
Берілген сызба үлкен залал немесе ірі экономикалық зиян келтіретін апаттарға әкеліп соғатын маңызды технологиялық агрегаттарды басқару кезінде қолданылады.
Жергілікті реттегіштер мен ЭЕМ-ді бір басқару жүйесінде қолдану, оның бағасын арттырады және күрделірек етеді.
Негізгі артықшылығы: жоғары сенімділік.
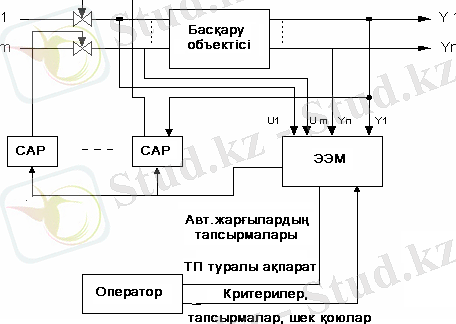
Сурет 1. 5 Супервизорлы басқару режиміндегі ТП АБЖ-нің құрылымы
Мұндай ТП АБЖ -де АМ іске қосу үшін қолданылған сигналдар ЭЕМ-нен тікелей келеді және басқару жүйесінде жергілікті реттегіштер болмайды. ЭЕМ бұл режимде таңдалған бақылану заңын бағдарламалық жүзеге асырады, басқарушы әсерлерді есептейді және олардың БО АМ берілуін қамтамасыз етеді. Оператордың функциясы жүйенің жұмысын бақылап отыру болып табылады.
Артықшылығы: жоғары жылдам әрекет, басқарудың күрделі заңдарын жүзеге асыру. Кемшілігі: сенімділігі аз.
Сурет 1. 6 Тікелей басқару режиміндегі ТП АБЖ-нің құрылымы
АБЖ-де ЭЕМ күрделі технологиялық процестермен бір уақытта бірнеше режимде жұмыс істей алады. Бір параметрлерге тек ақпараттық функциялар, басқаларға - супервизорлы режим, ал үшіншілерде тікелей басқару орындалады.
ТП АБЖ есептерін алгоритмдеу
ТП АБЖ-ны алгоритммен қамтамасыз етуін үш топқа бөлуге болады:
а) Ақпаратты жинау және бастапқы өңдеу алгоритмдері.
б) Арнайы математикалық қамтамасыз ету алгоримдері (интегралдау, салыстыру, шығынның өзгерісі кезінде түбірден шығару, т. б. ) .
в) Ақпаратты шығару алгоритмдері.
г) Жалпы жүйелік қамтамасыз ету алгоритмдері (операциялық жүйе жұмысының алгоритмдері) .
Ақпаратты жинау алгоритмдері жинау реттілігін және сәйкес жады бөлімдеріне ақпараттың жазылуын анықтайды. Сұрақтың мезгілдігі технологиялық параметрдің өзгеру сипатына тәуелді, ал артықшылық - технологиялық мәнділікке тәуелді. Сұрақтың реті қатаң болуы мүмкін, яғни қатал реттілікпен өндіріледі; немесе дағдыландырғыш, мысалы, егер кездейсоқ параметрдің мәні апаттық мәнге жақын болса, онда олар сұралады және жадыға ең алдымен енгізіледі.
- Аналогты сигналдарды таңбалау (ауқымдау)
Датчиктің шығыс сигналы мен технологиялық параметрдің айқын мәні арасындағы функйионалдық байланысты алу таңбалау мақсаты болып табылады. x
max
, x
min
, x
и
- датчиктің шығыс сигналының x(t) ең үлкен, ең кіші және өлшенетін мәндері болсын, ал y
max
, y
min
- айқын бірлікті датчиктің өлшеу аралығының x
max
пен x
min
-ға сәйкес келтірілген y(t) ең үлкен және ең кіші мәндері. Онда К
Т
=
 шамасы таңбалау коэффициенті деп аталады және технологиялық параметрдің мәнін y(t) өлшеу бірлігіне сәйкес анықтау келесі формула бойынша жүзеге асады:
шамасы таңбалау коэффициенті деп аталады және технологиялық параметрдің мәнін y(t) өлшеу бірлігіне сәйкес анықтау келесі формула бойынша жүзеге асады:
y(t) = K T (x и - x min ) + y 0 ,
мұнда y 0 - жылжу, яғни технологиялық параметрдің бастапқы мәні.
Бағдарламалық блок түріндегі таңбалану функциясы ЭЕМ жадысына салынады және ақпаратты өңдеудің жалпы алгоритмінің бір бөлігі болып табылады. Таңбалану функиясының көмегімен ЭЕМ-де есептелген технологиялық параметрдің айқын бірлікті мәні негізгі бағдарламаның одан арғы жұмысы кезінде қолданылады.
Мысал
Термокамерадағы температура, 300-ден 1000 ºC дейінгі аралықта өлшенетін және бірыңғай шығыс сигналы 4-тен 20 мА түрінде болған термоэлектрлік түрлендіргіш көмегімен өлшенеді.
 = T(I) таңбалану функциясы Т(I) =
= T(I) таңбалану функциясы Т(I) =
 (x
и
- 4) + 300 ºС = 43, 75*I + 300 ºC түрінде болады. Тоқтың кез келген мәні үшін температураның айқын мәнін өлшей аламыз.
(x
и
- 4) + 300 ºС = 43, 75*I + 300 ºC түрінде болады. Тоқтың кез келген мәні үшін температураның айқын мәнін өлшей аламыз.
I = 10 мА нүктесінде Т = 562, 5 ºC.
- Нақтылықты бақылау
Бастапқы мәліметтердегі қателерді табу мақсатына қолданылады. Тексеру x min ≤ x(t) ≤ x max нақтылдық диапазонында жүргізіледі немесе параметрдің жылдамдығының өзгерісі Δx min ≤ [x i (t) - x i-1 (t) ] ≤ Δx max болуы қажет. Нақтылықты есептеу мақсатында алдыңғы мәндер қабылдана алады (орташа, шекаралық және т. б. ) . Егер нақтылы емес мәндер анықталса, онда басқарушы жүйе апаттық жағдай туралы немесе/және технологиялық процессті тоқтатады.
- Фильтрлеу (Сүзгі)
Технологиялық процесстің параметрлеріндегі кездейсоқ бөгеттерді, шуды және бөгде сигналдарды азайтуға қолданылады.
Өлшеу нәтижесі Y(k) әдетте пайдалы сигнал X(k) және аддитивті бөгет Z(k) түрінде сипатталады, ол дегеніміз
Y(k) = X(k) + Z(k) .
АЖБ ТП бөгет көзі болып электромагнитті наводка, вибрация, ағыннын турбуленттілігі, датчиктердің өзіндік қателігі және т. б. бола алады.
Қарапайым сүзгілерге келесілерді жатқызуға болады:
- Өлшемдер жиынтығының өңдеу алгоритмі
Х
Ф
(i) =
 X(k), где Х
Ф
(i) - сүзгінің шығысы.
X(k), где Х
Ф
(i) - сүзгінің шығысы.
Шындығында ол кірістегі сигналдың арифметикалық ортасын есептейді. Х тұрақты болған жағдайда алгоритмді қолдануға болады.
- Рекуррентті алгоритм
Х
Ф
(i) = Х
Ф
(i-1) +
 [Х
Ф
(i) - Х
Ф
(i-1) ]
[Х
Ф
(i) - Х
Ф
(i-1) ]
- «Тайғақ» (ағымдағы) орташа сүзгісі
Х
Ф
(i) =
 Х(
j
)
Х(
j
)
Сигналдың соңғы өлшеулері К орташаланады.
- Экспоненциалды сүзгі

Аппараттық үйлесім болып RC-тізбегі табылады.
Қарастырылған сүзгілердің жұмыс алгоритмі АБЖ негізгі басқарушы бағдарламасының құрамындағы бағдарламалық блок (бағыныңқы бағдарлама) түрінде жүзеге асады
Ақпартты шығару алгоритмдері
Ақпартты көрсету, басып шығару құрылғыларына шығару кезіндегі операция реттілігін, тым төменгі немесе тым жоғарғы деңгейдегі ТП АБЖ-мен ақпарат алмасуын, атқарушы механизмге әсер ететін басқарушы әсерлердің шығару реттілігін анықтайды.
Ақпаратты өңдеу алгоритмдерінің реттілігін 7-суретте берілгендей сызба түрінде көрсетуге болады.
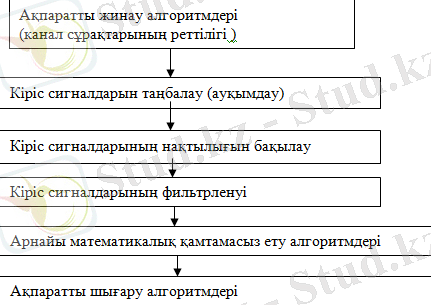
Сурет 1. 7 ТП АБЖ-гі ақпаратты өңдеу алгоритмдерінің реттілігі
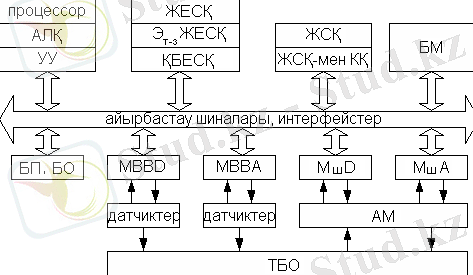
Сурет 1. 8 ТП АБЖ-ң ТҚК-нің құрылымды - функционалдық сұлбасы
АЛҚ - арифметикалық-логикалық құрылғы
... жалғасыСіз бұл жұмысты біздің қосымшамыз арқылы толығымен тегін көре аласыз.
- Іс жүргізу
- Автоматтандыру, Техника
- Алғашқы әскери дайындық
- Астрономия
- Ауыл шаруашылығы
- Банк ісі
- Бизнесті бағалау
- Биология
- Бухгалтерлік іс
- Валеология
- Ветеринария
- География
- Геология, Геофизика, Геодезия
- Дін
- Ет, сүт, шарап өнімдері
- Жалпы тарих
- Жер кадастрі, Жылжымайтын мүлік
- Журналистика
- Информатика
- Кеден ісі
- Маркетинг
- Математика, Геометрия
- Медицина
- Мемлекеттік басқару
- Менеджмент
- Мұнай, Газ
- Мұрағат ісі
- Мәдениеттану
- ОБЖ (Основы безопасности жизнедеятельности)
- Педагогика
- Полиграфия
- Психология
- Салық
- Саясаттану
- Сақтандыру
- Сертификаттау, стандарттау
- Социология, Демография
- Спорт
- Статистика
- Тілтану, Филология
- Тарихи тұлғалар
- Тау-кен ісі
- Транспорт
- Туризм
- Физика
- Философия
- Халықаралық қатынастар
- Химия
- Экология, Қоршаған ортаны қорғау
- Экономика
- Экономикалық география
- Электротехника
- Қазақстан тарихы
- Қаржы
- Құрылыс
- Құқық, Криминалистика
- Әдебиет
- Өнер, музыка
- Өнеркәсіп, Өндіріс
Қазақ тілінде жазылған рефераттар, курстық жұмыстар, дипломдық жұмыстар бойынша біздің қор #1 болып табылады.

Ақпарат
Қосымша
Email: info@stud.kz