Өнеркәсіптік роботтардың негізгі механизмдері: еркіндік дәрежелері, құрылымдық формулалар және манипуляторды синтездеу

МАЗМҰНЫ
КІРІСПЕ . . . 2
ӨНЕРКӘСІП РОБЫТТАР НЕГІЗГІ МЕХАНИЗІМДЕРІ
1. механизімнің еркіндік дәреже сан құрылымдық формолалары . . . 3
2. манипулиятор жасауға талдау . . . 6
ӘДЕБИЕТТЕР . . . 13
КІРІСПЕ
Робыттық техника - робытарды жасауға арналған ғылым негізі, техниканың жаңа саласы мехатрониканың негізі болып табылады.
Жалпы түрде мехатрондық обиектілермен жүиелерге механикалық, басқаратын және ақпаратты өлшеу жөйелері кіретін робытар мысалы өндірістік робытар олар өндірістің әрсаласында ақаусыз қызмет ету үшін оның ең негізгі басты болігі мехатронды обиектінің механикалық бөлігі өз кезінде қозғалысты түрлендіруге арналған атқарушы қозғалтқштармен әртүрлі текті механизімдрді іске қосатын жетектердің жиынтығын құрайтын манипулятордан атқарушы қондырғылар тәрізді тасымалдаушы жүйеден тұрады.
ӨНЕРКӘСІП РОБЫТТАР НЕГІЗГІ МЕХАНИЗІМДЕРІ
1. механизімнің еркіндік дәреже саны құрылымдық формолалары
машиналар механизімінде буындар күйін бір мәнді анықтайтын жалпыланған кардинаталар саны еркіндік дәреже санын не механизім қозғалғыштығы бірақ көп қозғалмалы басқармалы механизімдерге қатысты серпімділік саны және қозғалғыштық дәреже санына сәйкесді, шындығында еркін денеде 6 еркіндік дәрежесібар. Сондықтан манипулиятордың жұмыс мүшесі не кезкелген буыны 6-дан көп еркіндік дәрежесі саны жұмыс зонасын ұлғайту не болдырмау мақсатында алынады. Мысалы теллескоптық антеннаны буырышында тізбектей қосылған, жұптар құратын және бір бағытта қозғалатын кинеметикалық тізбек түрінде көруге болады.

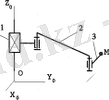
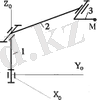
1-сурет. өндірістік робот және оның манипулиятрын құру схемасы
Бұл жағыдайда антенна ұзындықты қамтамасыз ету байланысты антенаның қозғалғыштық дәреже санының қозғалғыштық дәреже саны бірліктен үлкен кезкелген бүтін сан болуы мүмкін. осыған байланысты еркіндік дәреже саны инерционалды жүйеге қатысты қарастырылатын дене күйін анықтайтын тәуелсіз мүмкін орын ауыстырулардың тақ санын айтады.
Дәреже санын анықтау үшін құрылымдық формалалар қолданылады. Жалпы алғанда қозғалтқыштың дәреже санын W мына формуламен анықтайды:
 (1, 3)
(1, 3)
Мұндағы n - қозғалмалы буындар саны; S бұрылымдардың салыстрмалы қозғалысқа түсетін КП баланыстарының қосынды саны (1, 3) фомаласын қортындыласақ байланыс қатылығын әр буын басқа буынға қатысты 6 еркіндік дәрежесінеие, n буынынан тұратын жүйе күшін анықтайтын жалпыланған кардинатасаны 6n ға тең.
Егер буындар байланыс құрса, онда олар жалпы саны s тең байланыс санына жалпыланған кордината санын байланыстыра отырып өзінің қатысты байланыс қозалыстарына қосады.
 , (1, 4)
, (1, 4)
Мұндағы
 -1, -2, -3, -4, -5, -қозғалмалы НП -ның қосынды саны (1, 3), (1, 4) тен сомов-малышов құрылымдық формуласы шығады:
-1, -2, -3, -4, -5, -қозғалмалы НП -ның қосынды саны (1, 3), (1, 4) тен сомов-малышов құрылымдық формуласы шығады:
 (1. 5)
(1. 5)
Келтірлгендрді талдап жазсақ механизімдер үшін құрылымдық формолалар жазылады.
 (1, 6)
(1, 6)
(1, 6) фурмолла Чебышевтың құрылмдық формаласыда (1, 6) формаланы қортындыласақ жазықтықта бір-біріне қатысты денерлер 3 еркін дік дәрежесіне тең, тұйық емес кинеметикалық тізбегі бар манипулияторлар үшін қозғалыстың дәрежесіне кинеметикалық жұп саны мен анықтаған болады.
 (1, 7)
(1, 7)
Бірақ (1, 5) және (1, 6) құрылымдық формалалары белгілі шарттардың орныдалуы негізінде ғана нақты. Мысалы міндетті шарыт болып механизімдердегі айнымалы жұп остері өзара паралелл, ал енуші кинеметикалық жұптың бағыттауыштары айналу өсіне перпенді колиярболуы керек болып табылады реалды механиімдерде бұған жету оте қиын, сондықтан құрылымдық формолалар абстакті, идялды механизімдерге қолданылады деп ескергенде бірді ескеру қажет, құрылымдық формололары қортындылағанда қортындының еркіндік дәрежесін анықтауда жалпық қозғалтқыштың санынан байланыс саны алынады. әдеттегі механизімдер мен тұйық манипулияторларда қайталанушы байланыстар болуы мүмкін. Машина механизімінде қайталаушы байланыстарды артық байланыстарды артық валдың пайда бпайда болу бұрыштарға берілген байланыстар тәуелді болуы мен түсіндіріледі: сондай ақ қозғалтқыш дәрежесіне келтірлген қозғалтқыштар өзара тәуелді болатыны әсер етеді.
Сондықтан механизім құралдардың ең болшектік талдау үшін оның құрылымының басқа үлгілерді және қозғалғыштың еркіндік дәрежесін анықтаудың басқа қабылдаулар қажетмеханизім құруды талдау және синтездеу кезінде көп жағыдайда Метірлік өлшемдер ескерілмейді.
Мысалы симплициялық механизімнің топлограпиялық үйкелісін жасап, механизім құрылымынын талдауы мен синтездеуін шешуге мүмкіндік береді бұл кезде кинеметикалық жұп ұшін симплициялық кешендер құру кинеметикалық жұп құрамын бір-бірне қатысты күйлерін есептейтін кинеметикалық параметірлер білігіне сүйенеді
- манипулиятор жасауға талдау
қазіргі кездегі робыт манипулияторлардың орндаушы механизімдері құрудың түрлі схемеларын робыттардың орындалуындағы, техникалық эксппециялық және басқа талаптардың көп тілдегі айрмашылықпен түсіндіріледі сондықтан манипулиятор құрылымдық схемасын жүйелеу қажет.
Манипулятор құрылымын олардың функцияналды мүмкіндіктері бойынша жүргізіледі егер кезкелген манипуляторлар тізбегіне серпімділік функционалдық топтар құраса (СФТ) көрсінше СФТ-ны функционалдық мүмкіндіктері бойынша салыстру жүргізуге мүмкіндік береді.
Манипулиятор құрылымын функционалдық мүмкіндіктері бойынша талдау үшін келесі талаптардан шығады: үстап алудың қалайда бір нүктесі М кез келген жағыдайда осы нүктенің берілген күйінен келесіге өте алатындай етіп қозғалуынан тұруы қажет, көрсетілген талапқа қанағаттандыратын манипулиятормен айналмалы және енуші жұптар түзетілген қатты дифермацияланбайтын диференсалдаушы тұрады деп есептеледі.
Көрсетілген манипуляторларда маниберлік нолгетең мұндай манипулияторлардың кинеметикалық тізбегі серпімділік диперенсалдық топтарда сонымен, СФТ деп сыртқы байланыстардың нөлдік қорғалымдылығы қатфйту пренципін қолданғанда нөлік маниберліке ие кез келген ұстап алу нүктесінің берілген қозғалысын қамтамасыз ететін 3 буыннан 1 қозғалтқыш кинеметикалық жұптан тұратын кинеметикалық тізбекті айтады
Атомдық және шет ел конструкциясы робыттарды манипулиятор құрылу схемасын салыстру олардың конструкциясы негізінде белгілі СФГ дан комбинация түрінде болу не қажетті маниверлікті қамтамасыз ету үшін базалық СФГ ға қосылған бірнеше қосымша бұрылымдар мен бірнеше кинеметикалық жұптардан тұрад.
СФТ құрылымын талдау белгілі тізбекг салудан және енуші жұптар бағытынан олардың бағытталуын және айналмалы жұптардан белгілі ереже түрінде олардың өстерінің жиынтығын кезінде ғана ұстап алу нүктесінің берілген қозғалысы алынатынын көрсетеді:
СФТө құрылымының схемалары олардың әрбірін құру ережелері 1, 2-кестеде берілген бұлкезде тұра және кері кинеметика есептерін шешу үшін ППП, ВПП, ВВП кинеметикалық жұп біргуінен тұратын СФГ негізі болып табылады 1. 1 кесте құрастру схемасы және СФТ құру ережесі.
Таблица 1. 1. НФТ құрылымынң схемасы және қалыптастрыру ережелері
№
нфт
1
ППП

2
ІІІ

3
ААІ

4
ІАА
Ілгерлемелі қозғалыстағы жылдамдық векторыжәне бұрыштық жылдамдық векторы
Клинарлы векторлар
5
ААА
6
ІАІ

Бір констүрлі көп қозғалмалы манипулияторлар синтезі алы робыттың жұмыс мұшесін орын ауыстру үшін олдымен жұмыс органының қайсы бір (бұл кезде өстің еркіндік дәрежесі
 ) алмастру қажет одан соң денені осы өсті айнала айналдырады. Нәтижеде робытың жұмыс мүшесі 6 еркіндік дәрежесі бар еркіндене сынақты орын ауыстырады.
) алмастру қажет одан соң денені осы өсті айнала айналдырады. Нәтижеде робытың жұмыс мүшесі 6 еркіндік дәрежесі бар еркіндене сынақты орын ауыстырады.
Еркін қоғалысын талдау пренціпінде
 констұрукциясы көп қозғалмалы манипулиятордың құрылу схемасы негізделген (БКМ) құрылымдық схемеларды синтездеу үшін СФТ қолданылады. Көп қозғалмалы механизімнің құрылымдық схемасын синтездеу есебі жұмыс орган ы 6 еркіндік дәрежесіне ие және ұстап алу ретациясы шінен айнала алатын манипулиятордың құрылымдық схемасын құру есебінде шешіледі:.
констұрукциясы көп қозғалмалы манипулиятордың құрылу схемасы негізделген (БКМ) құрылымдық схемеларды синтездеу үшін СФТ қолданылады. Көп қозғалмалы механизімнің құрылымдық схемасын синтездеу есебі жұмыс орган ы 6 еркіндік дәрежесіне ие және ұстап алу ретациясы шінен айнала алатын манипулиятордың құрылымдық схемасын құру есебінде шешіледі:.
Сіз бұл жұмысты біздің қосымшамыз арқылы толығымен тегін көре аласыз.
- Іс жүргізу
- Автоматтандыру, Техника
- Алғашқы әскери дайындық
- Астрономия
- Ауыл шаруашылығы
- Банк ісі
- Бизнесті бағалау
- Биология
- Бухгалтерлік іс
- Валеология
- Ветеринария
- География
- Геология, Геофизика, Геодезия
- Дін
- Ет, сүт, шарап өнімдері
- Жалпы тарих
- Жер кадастрі, Жылжымайтын мүлік
- Журналистика
- Информатика
- Кеден ісі
- Маркетинг
- Математика, Геометрия
- Медицина
- Мемлекеттік басқару
- Менеджмент
- Мұнай, Газ
- Мұрағат ісі
- Мәдениеттану
- ОБЖ (Основы безопасности жизнедеятельности)
- Педагогика
- Полиграфия
- Психология
- Салық
- Саясаттану
- Сақтандыру
- Сертификаттау, стандарттау
- Социология, Демография
- Спорт
- Статистика
- Тілтану, Филология
- Тарихи тұлғалар
- Тау-кен ісі
- Транспорт
- Туризм
- Физика
- Философия
- Халықаралық қатынастар
- Химия
- Экология, Қоршаған ортаны қорғау
- Экономика
- Экономикалық география
- Электротехника
- Қазақстан тарихы
- Қаржы
- Құрылыс
- Құқық, Криминалистика
- Әдебиет
- Өнер, музыка
- Өнеркәсіп, Өндіріс
Қазақ тілінде жазылған рефераттар, курстық жұмыстар, дипломдық жұмыстар бойынша біздің қор #1 болып табылады.

Ақпарат
Қосымша
Email: info@stud.kz