Механика негіздері: кеңістік-уақыт, қозғалыс ұғымдары және Ньютон заңдарының қолданылуы

М А З М Ұ Н Ы
КІРІСПЕ . . . 3
1 МЕХАНИКАДАҒЫ НЕГІЗГІ ҰҒЫМДАР . . . 5
1. 1 Кеңістік. Уақыт. Қозғалыс . . . 5
1. 2 Санақ денесі. Санақ жүйесі. Жылдамдық. Үдеу . . . 16
1. 3 Бір қалыпты айнымалы қозғалыс . . . 19
2 Ньютонның заңдары . . . 25
2. 1 Ньютонның бірінші заңы . . . 25
2. 2 Ньютонның екінші заңы . . . 31
2. 3 Ньютонның үшінші заңы . . . 33
2. 4 Бүкіл әлемдік тартылыс заңы. Бүкіл әлемдік
тартылыс тұрақтысы . . . 34
2. 5. Инерциялық масса және гравитациялық масса . . . 36
2. 6. Қозғалыс мөлшерінің сақталу заңы . . . 37
2. 7. Серпімділік күштері . . . 39
2. 8. Үйкеліс күштері . . . 40
3 НЬЮТОН ЗАҢДАРЫНЫҢ ҚОЛДАНЫЛУЫНА МЫСАЛДАР . . . 42
3. 1 Эйнштейннiң салыстырмалылық принципi. Майкельсон тәжiрибесi . . . 42
3. 2 Жылдамдықты қосудың релятивистiк заңы . . . 47
3. 3. Галилейдің түрлендірулері . . . 49
3. 4 Бүкіләлемдік тартылыс заңының қолданылуы . . . 51
ҚОРЫТЫНДЫ . . . 55
ҚОЛДАНЫЛҒАН ӘДЕБИЕТТЕР ТІЗІМІ . . . 56
КІРІСПЕ
Жалпы физика курсын оқыту үрдісінде ең басты қиналатын мәселесі теориялық материалды практика жүзінде пайдалана білу мен өтетін құбылыстардың механизмін түсіну екендігі кімге де күмән туғызбайды. Бұл теориялық материалдың физикалық мәніне түсінбей, оны механикалық түрде есте сақтап қалуынан болады. Ал ондай білімнің күнделікті тұрмыста кездесетін кейбір физикалық құбылыстардың мәнін түсіндіруге, физикалық есептерді шығаруға ешбір көмегі тимейді. Физиканың логикалық есептерін шығару математикалық есептерді шығаруға қарағанда қиынырақ, себебі мұнда үнемі математикалық түрлендірулерді қолданып, есептің шешімін таба алмайсың. Бұл есептер үшін басты шарт - құбылыстың физикалық мәнін түсіну, сол арқылы логикалық теңдеу құру. Сонда ғана есептің ақиқат шешімін табуға болады.
Тақырыптың өзектілігі жоғарыда айтылған шарттарды ескере отырып дипломдық жұмыста механикалық қозғалысты сипаттайтын негізгі ұғымдар мен түсініктерге тереңірек тоқталып, динамика заңдарының басты моменттерін көрсете отырып, осы қозғалыс заңдарының өмірде қолданылу формалары мен техниканың дамуына әсері көрсетіледі.
Сондықтан бұл дипломдық жұмыс физиканы саналы түрде меңгеруге талпынушыларға Механика бөлімі бойынша оның қандай тақырыпты жете түсінетінін, нені үстірт білетінін анықтауға мүмкіндік жасайды.
Дипломдық жұмысты орындау барысында біз келесі мақсаттарды көздедік:
- қозғалыс ұғымының салыстырмалығын математикалық өрнектер көмегімен өрнектеу, оларды оқып-білуде және олармен жұмыс кезіндегі қарапайымдылығын талдау;
- механикалық әсер ету мен гравитация түсініктерін динамика заңдары арқылы мәнін ашу;
- Ньютон құрастырған әлемнің механикалық көрінісін бейнелеу.
Көрсетілген мақсаттарға жету үшін келесі міндеттерді жүзеге асыруға қажет :
- кеңістік, уақыт, жылдамдық, үдеу түсініктеріне анықтама беру;
- инерция, күш, гравитациялық масса, салмақ ұғымдарының мағынасын ашу;
- тең әсерлі күштер, консервативті күштер, тепе-теңдік шарттары жөнінде және динамика заңдарының күнделікті өмірде қолданылу мысалдарын қарастыру.
1 МЕХАНИКАДАҒЫ НЕГІЗГІ ҰҒЫМДАР
- Кеңістік. Уақыт. Қозғалыс.
Механика - физиканың денелер қозғалысын зерттейтін бөлімі. Механикада қарастырылатын мәселе - дененің кез келген уақыт мезетіндегі орнын анықтау.
Денелердің қозғалысын қарастырғанда, көп жағдайда, олардың деформациялануы ескерілмейді. Қозғалыс кезінде денені құрайтын бөлшектердің ара қашықтықтары өзгермейтін болса, онда ондай денені абсолют қатты дене дейді. Абсолют қатты денелер қозғалысын қарастырғанда, олардың өлшемдерін көбінесе ескермейді. Берілген жағдайда (есепте) өлшемдерін ескермеуге болатын денені материялық нүкте деп атайды [1] .
«Дене қозғалады» дегенде, оның немен салыстырғанда қозғалатынын айтпасақ, сөзіміз мағынасыз болады, өйткені механикалық қозғалыс әрқашан салыстырмалы ұғым. Қозғалмайды деп алынған денені санақ денесі дейді. Санақ денесі және ара қашықтық пен уақытты өлшеуге арналған құралдар санақ жүйесін құрайды. Әдетте, санақ жүйесіне белгілі бір координаттар жүйесі бекітіледі (1, а-сурет) . Материялық А нүктенің орны санақ жүйесінде координаттар арқылы немесе радиус-вектормен, яғни координаттар басынан берілген А нүктесіне жүргізілген вектормен анықталады (1, б-сурет) .
Дене қозғалғанда оның берілген санақ жүйесінде белгілі бір ретпен басып өтетін нүктелер жиынын траектория дейді.
Қозғалыстағы материялық нүктенің кеңістіктегі орнын анықтау үшін х, у, z үш координат (1, а-сурет), жазықтықтағы орнын анықтағанда х және у екі
координат (1, б-сурет), түзудің бойымен қозғалғанда бір координаттың мәні қажет (1, в-сурет) .
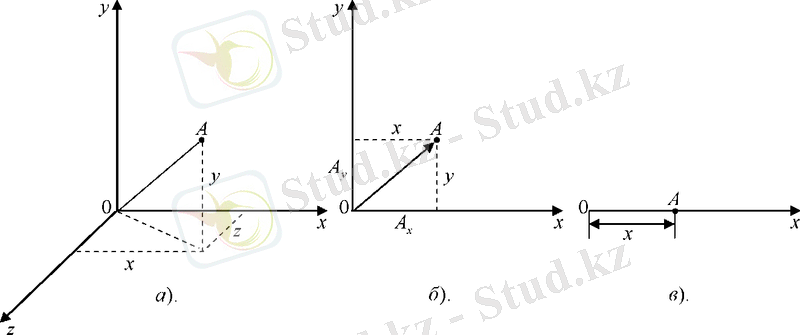
1-сурет.
Кеңістік ұғымы обьектілерді бақылау мен тәжірибелік пайдалану негізінде қалыптасты.
Уақыт ұғымы адамның оқиғалардың ауысуын сезінуінің нәтижесінде, заттардың жағдайының біртіндеп өзгеруі арқылы жүзеге асырылады.
Күнделікті адам санасында кеңістік пен уақыт үғымы қалыпты тұрмыстық жағдай ретінде есептелінеді, материя уақыт пен кеңістіктің аумағында қарастырылып, материя жоғалған күйде де, олар сақталып қала береді деп есептеледі [2-14] .
Мұндай көзқарас кеңістік пен уақытқа абсолютті мән береді, және бұл жайлы И. Ньютонның «Табиғат философиясының математикалық бастамалары» атты еңбегінде нақты анықтама берілді. Бұл жерде абсолютті кеңістік пен уақыт жаратылыстың материалдық процестерден тәуелсіз өзін-өзі басқаратын элементтері ретінде қарастырылады. Бұл концепция «қара жәшік концепциясы» деп аталады.
Бірақ оларда субстанцияның ең маңызды қасиеті - әр түрлі денелерді тудыру қабілеті жоқ. Сонымен қатар басқа концепциялар да бар (Беркли, Мах, Авенариус тағы басқа) олар кеңістік пен уақытты адам санасына тәуелді етіп көрсетеді. Кеңістік пен уақыт мәселелері жақыннан әсер ету және алыстан әсер ету концепцияларымен тығыз байланысты. Алыстан әсер ету гравитациялық және электр күштерінің бір сәтте абсолюттік кеңістік арқылы таралуы, ең соңында өзінің көздеген мақсатына құдайдың бұйрығымен жетеді. Ал жақыннан әсер ету концепциясы (Декарт, Гюйгенс, Френель, Фарадей) кеңістікті зат пен эфирдің жалғасы ретінде қарастырады.
Өзара әрекеттесу мен кеңістікті түсіну классикалық физиканың шеңберінде дами отырып, XX ғасырда одан әрі дамыды.
Кеңістік пен уақыт қайтадан материя атрибуты ретінде оны анықтайтын байланыстары және өзара байланыстары арқылы түсіндіріледі [3-16] .
Уақыт пен кеңістіктің қазіргі кездегі түсінігі А. Эйнштейннің салыстырмалылық теориясы арқылы түсіндіріледі.
Салыстырмалылық теориясының ең алғашқы бастамасы салыстырмалылық принципі болып табылады.
XX ғасырдың басында салыстырмалылық принципі оптика мен физикаға және физиканың басқа салаларына қатысты екендігі белгілі болды. Салыстырмалылық принципі өзінің мәнін кеңейтіп, мынадай анықтамаға ие болды: оқшауланған материалдық жүйеде кез-келген процесс бірдей жүреді, және ол жүйе бір қалыпты түзу сызықты қозғалыс жағдайында болуы керек. Немесе физиканың заңдары барлық инертті жүйелерде бірдей формаға ие.
Бір инертті жүйеден келесіге ауысу Лоренц қайта өзгертулері арқылы жүзеге асырылды. Бірақ жарық жылдамдығы түрақтылығы туралы мәліметтер қайтадан жаңа түсініктерді қажет ететін мәселелерге әкеліп тіреді. 1904 жылы X. Лоренц қозғалыстағы дене өзінің қозғалыс бағыты бойынша қысқаратындығын және әртүрлі жүйелерде байқалатын уақыт аралықтары өлшенетінін айтты. Бірақ, келесі жылы А. Эйнштейн Лоренц қайта құруларындағы байқалатын уақытты нақты уақыт ретінде қарастырды [4-7] .
Жалпы салыстырмалылық теориясында кеңістік - уақыт қатынастарының материалдық процестерге қатысының жаңа жақтары ашылды. Жалпы салыстырмалылық теориясы инерциялық және гравитациялық массалардың эквиваленттік принципінен шығады. Атап айтқанда, массалардың эквиваленттік принципінің негізінде салыстырмалылық принципі қалыптасты, ол жалпы салыстырмалылық теориясында табиғат заңдарының инварианттылығын бекітті.
Салыстырмалылық теориясы кеңістіктің ауырлық күшінің әсерінен майысатындығын және уақыт барысының күшті гравитациялық өрістерде баяулайтынын анықтады.
Жалпы салыстырмалылық теориясының фантастикалық болжамдарының бірі - өте күшті тартылыс өрісінде уақыттың толық тоқтайтындығы туралы. Тартылыс күші артқан сайын уақыттың баяулауы да күшейе түседі. Уақыттың баяулауы жарықтың гравитациялық қызыл орын ауыстыруы арқылы байқалады да, толқындар үзындығы артқан сайын оның жиілігі азая береді. Белгілі бір жағдайда толқын үзындығы шексіздікке, ал жиілігі нөлге үмтылады.
Салыстырмалылық теориясы уақыт пен кеңістіктің бірлігін көрсетті, кеңістік-уақыттық төртөлшемдік контимум туралы түсінік қалыптасты.
Салыстырмалылық теориясы масса мен энергияны Е-МС қатынасымен байланыстырды, мұнда С - жарық жылдамдығы.
Салыстырмалылық теориясында екі заң - зат массасының және энергиясының сақталуы заңдары бірігіп, энергия және зат массасының сақталуы деген бір заңға айналды [5-9] .
Қазіргі кездегі жаратылыстанудағы, оның ішінде физикадағы өзекті мәселелердің бірі - әлемдегі себептілік және себептілік қатынастар табиғатының мәселесі. Физикада бұл мәселе обьективті заңдылықта динамикалық және статистикалық заңдар арқылы беріледі. Бұл мәселені шешуде екі философиялық бағыт - детерминизм және индетерминизм қалыптасты.
Детерминизм - табиғи, әлеуметтік және психологиялық құбылыстардың обьективті себептерін жоққа шығарды.
Қазіргі кездегі физикада детерминизм идеясы обьективті физикалық заңдылықтарды тану арқылы беріліп, іргелі физикалық теорияларға сүйенеді.
Іргелі физикалық теориялар (заңдар) физикалық заңдылықтар туралы ең маңызды білім жиынтығын береді. Әрине, бұл білім жиынтығы ең соңғы нәтиже деп қарастырылмайды, дегенмен бүгінгі күнде табиғаттағы физикалық процестерді толық ашып көрсетеді.
Ғылымтанушы ғалымдар кез келген физикалық теорияның негізін үш элемент:
1) физикалық бірліктер жиынтығы (Мысалы: Ньютон механикасында - кординаталар, импульс, энергия, күш тағы басқа) ;
2) физикалық күш түсінігі;
3) қозғалыс теңдеуі, яғни белгілі жүйенің эволюциясын көрсететін теңдеу құрайды деп есептейді.
Динамикалық заң дегеніміз - физикадағы обьективті заңдылықтарды сан түрінде, физикалық бірліктер байланысы арқылы беретін заң. Динамикалық заңдардың жиынтығын динамикалық теория деп атайды.
Тарихи түрде алғанда ондай теориялардың алғашқысы Ньютонның классикалық механикасы [6-12] .
Іргелі физикалық теориялардың ішіндегі тағы бірі - Максвелдің электродинамикасы. Максвелл теңдеулері материяның злектромагниттік формасы үшін қозғалыс теңдеулері болып табылады. Сонымен бірге электродинамика құрылымы ортақ сипаттары бойынша Ньютон механикасының құрылымын анықтайды.
Динамикалық сипаттағы басқа іргелі теорияларға тұтас орта механикасы, термодинамика және жалпы салыстырмалылық теориясы (гравитациялық теория) жатады.
Физикадағы классикалық детерминизмнен бастарту - динамикалық заңдардың әмбебап емес екендігін, олардан басқа табиғаттың терең заңдары - яғни, XIX ғасырдың екінші жартысында ащылған статистикалық заңдардың бар екендігі түжырымдалды.
Статистикалық заңдар мен теориялардың мынандай өзіндік ерекшеліктері бар:
1. Статистикалық теорияларда кез-келген күй жүйенің ықтималды сипаттамасын береді. Бұның өзі статистикалық теорияларда күй физикалық бірліктер арқылы емес, бұл бірліктердің статистикалық таралуы арқылы анықталады.
2. Статистикалық теорияларда белгілі алғашқы нәтиже бойынша физикалық бірліктердің шамалары емес, бұл шамалардың берілген интервал ішіндегі ықтималды мәні анықталады.
Күйдің статистикалық теориялардағы ықтималды сипаттары ди-намикалық теориялардағы сипаттамаларынан мүлдем өзгеше.
Статистикалық заңдар мен заңдылықтар деңгейінде біз себептілік пен жолығамыз. Бірақ статистикалық заңдылықтардағы детерминизм табиғаттағы детерминизм формасының ең терең түрін береді.
Статистикалық заңдар мен теориялар физикалық заңдылықтарды сипаттаудың ең бір жетілген түрі болып табылады [7-13] .
Физикада статистикалық заңдар шыға салысымен олардың динамикалық заңдармен қатысы туралы мәселе қарастырыла бастады.
Статистикалық заңдар - заңдылықтарды сипаттаудың жаңа түрі ретінде, алғашында классикалық механиканың динамикалық теңдеулері негізінде берілді.
Кванттық теорияның пайда болуы және дамуы біртіндеп динамикалық және статистикалық заңдардың табиғат заңдылықтарын көрсетудегі рөлін қайта қарауға алып келді. Сондықтан, көптеген ғалымдар: Н. Бор, В. Гейзенберг, М. Борн, П. Ланжевен және басқалары статистикалық заңдарды алғашқы деп қарау туралы тезис ұсынды.
Статикалық және динамикалық заңдарды қарастырған кезде біз бұл мәселенің екі аспектісімен кездесеміз.
Бірінші аспекті бойынша, динамикалық және статистикалық заңдар арасындағы қатынас былай беріледі: жеке обьектілердің жағдайын білдіретін заңдар - динамикалық заңдар, ал олардың жиынтығының жағдайын білдіретін заңдар - статистикалық заңдар ретінде қарастырылады. Классикалық механика мен статистикалық механика арақатынасы осындай.
Екінші аспект бойынша, динамикалық және статистикалық заңдардың арақатынасының мәселесі қарастырылады. Бұған мысал ретінде термодинамика және статистикалық механика, Максвелдің электродинамикасы мен электрондық теория жатады.
Дене екі жағдайда материялық нүкте деп аталады: а) дененің өлшемі осы дене қозғалуы нәтижесінде жүрілген аралықпен салыстырғанда немесе осы денеден басқа денелерге дейінгі ара қашықтықпен салыстырғанда өте аз болса; б) дененің барлық нүктесі бірдей қозғалыспен сипатталған жағдайда, яғни барлық нүктесінің кез келген мезеттегі жылдамдықтары мен қозғалыс траекториялары бірдей болса, мұндай қозғалыс ілгерлемелі қозғалыс деп аталады. Ілгерлемелі қозғалыс кезінде денемен байланысқан кез - келген түзу өзіне өзі параллель орын ауыстырады. Денелердің ілгерлемелі қозғалысы траекторияның түріне қарай екіге бөлінеді: егер траектория түзу болса, онда түзу сызықты ілгерлемелі қозғалыс, ал траектория қисық сызық болса, онда қисық сызықты ілгерлемелі қозғалыс деп аталады [8-15] .
Ілгерлемелі қозғалыс.
Дене ілгерлемелі қозғалыс жасағанда, оның барлық нүктелерінің қозғалыс сипаты бірдей болатындықтан, дененің орнына материялық нүктенің қозғалысын қарастырамыз. Материялық нүкте қисық бойымен қозғалады делік (2-сурет) . Осындағы ∆l векторы орын ауыстыру болып шығады. Материялық нүктенің белгілі бір уақыт аралығындағы орын ауыстыруы дегеніміз нүктенің бастапқы уақыт мезетіндегі орнынан соңғы уақыт мезетіндегі орнына жүргізілген ∆r векторы (2-сурет) . 2-суреттен ∆r b =r a + ∆r бұдан орын ауыстыру векторы мынаған тең: ∆r= r b = r a .
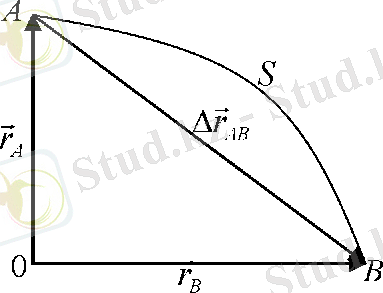
2-сурет.
Материялық нүкте траекториясының ұзындығына тең скаляр шама S жүрілген жол деп аталады (2-сурет) . Материялық нүкте түзу бойымен бір бағытта қозғалғанда жол мен орын ауыстыру векторының модулінің мәні тең болады, яғни S=ǀ∆rǀ, ал басқа жағдайларда орын ауыстыру модулі әрқашан жол ұзындығынан S>ǀ∆rǀ аз болады. Тіпті, шеңбер бойымен болатын немесе тербелмелі қозғалыста орын ауыстыру модулі кейде нөлге де тең болуы мүмкін, өйткені дене бастапқы орнына қайта-қайта оралады. Ал жүрілген жол уақытқа байланысты кемімейтін, әрқашан оң скаляр шама.
Орын ауыстыруды осы орын ауыстыруға кеткен уақытқа бөлсек, қозғалыс жылдамдығы шығады: v= . Бұл нүктенің АВ түзуі бойымен ∆t уақыт ішіндегі қозғалыс жылдамдығы (2-сурет) . Мұның мәні қозғалыс жылдамдығының нақты мәніне сәйкес келмейтінін оңай байқауға болады. Алайда, егер ∆t уақыт аралығын шексіз азайтсақ, яғни В нүктесін А нүктесіне жақындатсақ, онда ∆r де нөлге ұмтылады, ал оның бағыты А нүктесіне жүргізілген жанама бойымен бағытталып, жылдамдықтың мәні материялық нүктенің нақты жылдамдығы мәнінен айырмашылығы азая береді. Сонымен, бұл жылдамдық - уақыт ∆t нөлге ұмтылғанда, қатынасының ұмтылатын шегі: ν= = .
Жылдамдық қозғалыс күйінің сандық өлшеуіші; физика тілінде айтқанда, жылдамдық элементар орын ауыстыру векторының осы орын ауыстыруға кеткен уақытқа қатынасына тең шама.
Траекторияның берілген нүктесіндегі жылдамдық - осы нүктеге жүргізілген жанаманың бойымен бағытталады.
Материялық нүктенің қозғалыс жылдамдығының уақытқа байланысты өзгеруін сипаттайтын шама - үдеу. Үдеу уақыт өтуіне байланысты жылдамдықтың модулі мен бағытының қалай өзгеретінін көрсетеді де, сан жағынан, жылдамдық өзгерісі векторының ∆ν осы өзгеріске кеткен ∆t уақытқа қатынасына тең болады: a = .
Кинематикадан есеп шығарғанда, берілген траектория бойынша жолдың ұзындығының уақытқа тәуелділігі түрі анықталады. Қозғалыс траекториясы мен қозғалыс заңы бір-біріне байланысты емес сипаттамалар, сондықтан қандай да болсын бір қозғалысты қарастырғанда олардың әрқайсысының ерекшеліктерін атап айту қажет [9-5] .
Траекторияның түріне қарай қозғалыс түзу сызықты қозғалыс және қисық сызықты қозғалыс болып бөлінеді.
Қозғалыс заңдарының берілуі:
- жолдың S ұзындығының t уақытқа тәуелділігін көрсететін кесте түрінде;
- жолдың S ұзындығының t уақытқа тәуелділігі график түрінде;
- жолдың S ұзындығының t уақытқа тәуелділігі формула түрінде беріледі.
Қозғалыс заңдарының барлығы қозғалыстың (түзу сызықты ма, жоқ әлде қисық сызықты ма оған тәуелсіз) түріне қарамастан бірдей жазылатын болғандықтан, бұдан былай біз орын ауыстыру мен жылдамдық модульдерінің уақытқа байланысты өзгерістерін көрсететін қозғалыс заңдарын ғана қарастырамыз. Ал орын ауыстыру, жылдамдық бағыттарының өзгерісін қозғалыс траекториясы сипаттайды.
Егер қозғалыс кезінде қозғалыс бағыты (немесе жылдамдық бағыты) өзгермесе, онда ол түзу сызықты қозғалыс деп аталады.
Егер қозғалыс кезінде қозғалыс бағыты (жылдамдықтың бағыты) өзгеріп отырса, онда мұндай қозғалыс қисық сызықты қозғалыс деп аталады.
Егер жылдамдық модулі уақыт өтуіне қарай өзгермесе, онда мұндай қозғалысты бір қалыпты қозғалыс дейді, яғни дене тең уақыт аралықтарында бірдей жол жүреді.
Егер тең уақыт аралықтарында жылдамдық модулі бірдей шамаларға өзгеретін болса, онда мұндай қозғалысты бір қалыпты үдемелі қозғалыс дейді.
Жоғарыдағы анықтамаларды пайдалана отырып, жалпы физика курсында қарастырылатын барлық күрделі қозғалыс түрлерінің сәйкес анықтамаларын беруге болады.
- Егер қозғалған дене тең уақыт аралықтарында бірдей жол жүріп (яғни жылдамдық модулі өзгермесе) және қозғалыс бағыты өзгермесе, онда мұндай қозғалыс бір қалыпты түзу сызықты қозғалыс деп аталады.
- Қозғалыс бағыты ұдайы өзгеріп отырып, ал жылдамдық модулі тұрақты болатын қозғалысты бір қалыпты қисық сызықты қозғалыс дейді.
- Егер қозғалыс бағыты өзгермесе, ал жылдамдық модулі бойынша тең уақыт аралықтарында бірдей шамаға өзгеріп отыратын болса, онда қозғалыс түзу сызықты бір қалыпты үдемелі қозғалыс деп аталады.
- Қозғалыс бағыты ұдайы өзгеріп отырып, ал жылдамдық модулі тең уақыт аралықтарында бірдей шамаға өзгеретін қозғалыс қисық сызықты бір қалыпты үдемелі қозғалыс деп аталады [10-15] .
Қозғалыс заңдарын қарастырған кезде дененің кез келген траектория бойымен болатын (мысалы, судың, өзеннің бұралаңдаған арнасымен ағысы) қозғалысының жолы мен жылдамдығының мәндері қажет болады. Сондықтан олардың мәндерін шартты түрде бір бағытта мысалы, ағыс бағыты бойынша оң деп, ал керісінше, ағыс бағытына қарсы болса, теріс деп аламыз.
Материялық нүкте траектория бойымен тең уақыт аралықтарында бірдей жол жүрсе немесе уақыт өтуіне қарай жылдамдық модулі өзгермесе, ондай қозғалыс бір қалыпты қозғалыс деп аталады, яғни ν= .
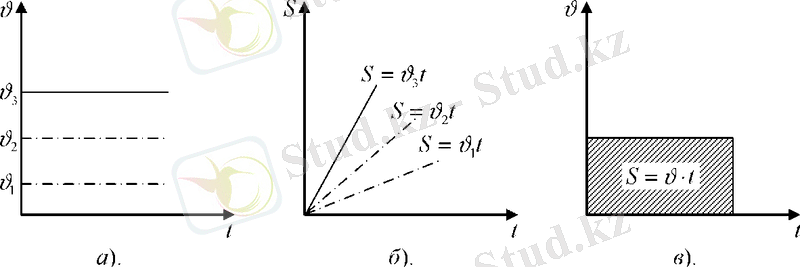
3-сурет.
Олай болса, қозғалыс кезінде жүрілген жол жылдамдық модулін уақытқа көбейткенге тең: S=ν·t . Дененің t уақыт мезетіндегі координаты x=x 0 +ν·t , мұндағы x 0 дененің t=0 бастапқы мезеттегі координаты. 3-суретте бір қалыпты қозғалыстың жылдамдығы мен жолының уақытқа байланысты сызбасы көрсетілген.
Жылдамдық неғұрлым көп болса, жолдың уақытқа байланысты сызбасындағы (3, б-сурет) түзудің көлбеулік бұрышы соғұрлым тік болады.
x=0 болса, онда координат пен жолдың сызбалары сәйкес келеді. Халықаралық бірліктер жүйесінде жылдамдық бірлігіне бір секундтағы метр алынған. Алайда, жүйеден тыс бірліктер де қолданылады, мысалы бір сағаттағы километр (км/сағ), бір секундтағы километр (км/с) және т. б [12-17] .
1. 2 Санақ денесі. Санақ жүйесі. Жылдамдық. Үдеу
Айнымалы қозғалыс деп уақыт өтуіне қарай жылдамдық модулі өзгеріп отыратын немесе материялық нүкте траектория бойымен тең уақыт аралықтарында әр түрлі жол жүретін қозғалысты айтады.
Айнымалы қозғалыстың ν орт орташа жылдамдығы дененің ∆t уақыт
... жалғасыСіз бұл жұмысты біздің қосымшамыз арқылы толығымен тегін көре аласыз.
- Іс жүргізу
- Автоматтандыру, Техника
- Алғашқы әскери дайындық
- Астрономия
- Ауыл шаруашылығы
- Банк ісі
- Бизнесті бағалау
- Биология
- Бухгалтерлік іс
- Валеология
- Ветеринария
- География
- Геология, Геофизика, Геодезия
- Дін
- Ет, сүт, шарап өнімдері
- Жалпы тарих
- Жер кадастрі, Жылжымайтын мүлік
- Журналистика
- Информатика
- Кеден ісі
- Маркетинг
- Математика, Геометрия
- Медицина
- Мемлекеттік басқару
- Менеджмент
- Мұнай, Газ
- Мұрағат ісі
- Мәдениеттану
- ОБЖ (Основы безопасности жизнедеятельности)
- Педагогика
- Полиграфия
- Психология
- Салық
- Саясаттану
- Сақтандыру
- Сертификаттау, стандарттау
- Социология, Демография
- Спорт
- Статистика
- Тілтану, Филология
- Тарихи тұлғалар
- Тау-кен ісі
- Транспорт
- Туризм
- Физика
- Философия
- Халықаралық қатынастар
- Химия
- Экология, Қоршаған ортаны қорғау
- Экономика
- Экономикалық география
- Электротехника
- Қазақстан тарихы
- Қаржы
- Құрылыс
- Құқық, Криминалистика
- Әдебиет
- Өнер, музыка
- Өнеркәсіп, Өндіріс
Қазақ тілінде жазылған рефераттар, курстық жұмыстар, дипломдық жұмыстар бойынша біздің қор #1 болып табылады.

Ақпарат
Қосымша
Email: info@stud.kz