Троллейбустың векторлы басқарылатын күштік асинхронды электржетегінің математикалық моделі мен динамикалық сипаттамаларын зерттеу

1
2
3
4
Аңдатпа
Бұл дипломдық жұмыстың зерттеу нысаны троллейбустың күштік
асинхронды электржетегі.
Жұмыс мақсаты
-
троллейбус электржетегінің динамикалық
сипаттамасын зерттеу.
Зерттеу барысында сызықсыз жүйені есептейтін, векторлы басқарылатын
күштік асинхронды электржетекті АБЖ-ның математикалық үлгісі жасалды.
Электржетектің жұмыс тәртіптеріне зерттеу жүргізілді.
Көрсетілген техникалық көрсеткіштерге қол жеткізілді: жоғарғы
жылдамдық 65км/сағ, екпіндеу уақыты 26 с-тан аспайды, троллейбустың
меңгеру еңістігі 12%.
Бұл жұмыс келесі бағдарламалар көмегімен жүзеге асырылды: MathCAD
13, Microsoft Office Word, Matlab07, Microsoft Office Visio.
5
Аннотация
В этой дипломной работе объектом исследования является тяговый
асинхронный электропривод троллейбуса.
Цель работы
-
исследование динамических характеристик
электропривода троллейбуса.
В процессе исследований была разработана математическая модель САУ
тяговым асинхронным электроприводом с векторным управлением,
учитывающая нелинейности системы. Было проведено исследование режимов
работы электропривода.
Достигнуты заданные технические показатели: установившаяся
максимальная скорость 65км/ч, время разгона не превышает 26 с., ограничение
ускорения, преодолеваемый троллейбусом подъем 12%.
Работа выполнена с использованием следующих программ для ПК:
MathCAD 13, Microsoft Office Word, Matlab07, Microsoft Office Visio.
6
Annotation
In this thesis object of research is the traction asynchronous electric drive of
the trolleybus.
The work purpose - research of dynamic characteristics of the electric drive of
the trolleybus.
In the course of researches the SAU mathematical model the traction
asynchronous electric drive with vector management considering nonlinearity of
system was developed. Research of operating modes of the electric drive was
conducted.
The set technical indicators are reached: the established maximum speed
65km/h, time of dispersal doesn't exceed 26 seconds, acceleration restriction, the
raising of 12% overcome by trolleybus.
Work is performed with use of the following programs for the personal
computer: MathCAD 13, Microsoft Office Word, Matlab07, Microsoft Office Visio.
7
Мазмұны
Кіріспе . . . 9
1 Негізгі бөлім . . . 10
1. 1 Рельссіз электрлі көліктің жылжымалы
құрамасының классификациясы және жалпы сипаттамасы . . . 10
1. 2Троллейбустардың салыстырмалы бағасы және троллейбус
құрастырудың келешекте дамуы . . . 11
1. 3 Троллейбустың АКСМ 321 күштік электрлік жетегінің
құрылысы . . . 13
2 Электржетектің сипаттамары және негізгі параметрлерін есептеу . . . 19
2. 1 Орын басу сұлбасының параметрін және қозғалтқыштың
қосымша параметрін анықтау . . . 19
2. 2 Механикалық жүйенің параметрлерін есептеу . . . 25
2. 3 Қозғалысқа кедергі келтіретін күшті анықтау . . . 27
2. 4 Түрлендіргіш-қозғалтқыштың ашық жүйесінің ақырғы
сипаттамасын есептеу . . . 29
2. 5 Қозғалтқышты тікелей қосу кезіндегі өтпелі процессті есептеу . . . 34
3 Троллейбустың күштік асинхронды электржетегінің векторлы
басқару жүйесін құрастыру . . . 38
3. 1 Күштік асинхронды электржетектің векторлы басқару
жүйесін есептеу . . . 38
3. 2 Тоқ контурын оңтайластыру . . . 43
3. 3 Потокосцепленияның контурын оңтайландыру . . . 47
3. 4 Жылдамдық контурын оңтайландыру . . . 50
4 Өміртіршілік қауіпсіздік бөлімі . . . 53
4. 1 Троллейбус паркіндегі зиянды және қауіпті факторларға
талдау жасау . . . 53
4. 2 Электр қауіпсіздігі. Троллейбуста электр зарядының адамға
әсеріне талдау жасау, қорғану шаралары . . . 55
4. 3 Жөндеу цехындағы табиғи жарықтандыру жүйесіне есеп
жүргізу . . . 58
5 Экономикалық бөлім . . . 59
5. 1 Троллейбус жөндеу цехын қайта құру және үлкейтуіне күрделі
қаржы құйуды есептеу . . . 59
Қорытынды . . . 66
Қолданылған әдебиеттер тізімі . . . 67
Қосымша А . . . 68
8
Кіріспе
Заманауи қалалардың
транспортты инфраструктурасының даму
келешегі біріншіден электрлі көліктердің дамуымен анықталады. Электрлі
жолаушыларды тасымалдау көліктерінің ішінде троллейбус ең келешектісі.
Троллейбус, автобус пен трамвайдың көптеген жақсы қасиеттерін өз бойына
сіңірген. Троллейбус дыбыссыз қозғалады, көмірқышқыл газын бөлмейді,
салыстырмалы жоғары маневрлілікпен және жақсы динамикалық қасиетке ие.
Көшенің қарапайым бөлігін қолданады, троллейбусті пайдалану қаржылық көп
шығынды талап етпейді. Алайда ол салыстырмалы төмен жылдамдыққа ие,
контактілі желі және күштік қосалқыстанция қажет.
Қазіргі уақытта көптеген троллейбустардың электржетектері жиелікті
түрлендіргіш теристорлы асинхронды қысқатұйықталған қозғалтқыш негізінде
жасалады. Күштік жартылайөткізгіш техникаларының дамуы, жекелегенде,
технологиялық зерттемелерді дайындау: бекітілетін күштік теристорлар және
оқшауланған бекітпесі бар биполярлы транзисторлар (IGBT - транзисторлар),
бұлар бізге асинхронды жетекті және кез-келген сатыдағы қиындықты
басқаруды қуатты энергетикалық жүйеде жасауға мүмкіндік берді. Мұндай
басқару жүйесінің габариті мен салмағы аз болады, қызмет көрсетілуіде
арзанырақ, сондай ақ тиімді басқару жетегі арқасында электрэнергияны
қосымша үнемдейді.
Жолаушыларға жайлылықты қамтамасыз ету өзекті мәселе болып отыр.
Электржетекте жайлылық электрқозғалтқышты іске қосқанда жұлқынуды
шектеу және троллейбус екпіндеу кезінде үдеуді шектеу арқылы жүзеге
асырылады.
Осы жұмыс мақсаты троллейбустың күштік электржетегінің басқару
сапасын жоғарылату.
Осы қойылған мақсатқа жету үшін келесі тапсырмаларды шешу керек:
- троллейбустың жұмыс шартына талдау жүргізу және оның күштік
электржетегіне шарттар тұрғызу;
- күштік асинхронды электржетектің басқару жүйесін таңдап оны
есептеу;
- троллейбустың күштік асинхронды электржетектің еліктендіру моделін
жасау;
-
электрқозғалтқышты іске қосқанда жұлқынуды шектеу және
троллейбус екпіндеу кезінде үдеуді шектеуді қамтамасыз ету;
- өтпелі процесс және перегрузка кезінде тоқ секірісінің азаюын
қамтамасыз ету;
- электржетектің басты жұмыс режимдерін зерттеу.
9
1 Негізгі бөлім
1. 1
Рельссіз электрлі көліктің жылжымалы
құрамасының
классификациясы және жалпы сипаттамасы
Заманауи қалалық электр көліктері халықты өте көп маршруттық
бағыттарда қызмет етеді. Сондықтан олар келесі талаптарға сай болуы керек:
- Жоғары сенімділік және қауіпсіз қозғалыс;
- Жүру құнының минимумы кезіндегі жолаушыға максимум жайлы
болуы;
- Қажетті жиелікпен және желідегі қозғалыстың жүйелілігі;
- Жұмыс уақытында жоғары бултарушылыққа және жоғары күштік-
динамикалық қасиетке ие болуы тиіс;
- Қозғалыс кезінде шум минималды деңгейде болуы тиіс;
- Қоршаған ортаны қорғау қызметімен қойылған талапқа сай,
экологиялық қауіпсіздік деңгейі.
Рельсті электрлі көліктермен қатар, рельссіз электрлі көліктерде
қоғамдық көлік ретінде кең қолданысқа ие. Қоректендіру көзіне және
қуатпен қоректендіру тәсіліне сай рельссіз электрлі көліктері келесі
түрлерге бөлінеді: контактілі, контактісіз немесе автономды, біріктірілген.
Контактілі түрге троллейбустар, трамваилар және метропоездар жатады,
олар қозғалысқа күштік электрқозғалтқыш арқылы келтіріледі, күштік
электрқозғалтқыштар электрқуатын арнайы сырғанайтын өткізгіштер арқылы
екісымды
контактілі желіден алады.
Сондай ақ контактілі желі
орталықтандырылған электрстанциядан қоректенеді.
Контактісіз түрге қорек көзі бар күштік электрқозғалтқыш көмегімен
қозғалысқа келтіріледі:
- Қозғалмалы құраманың өзінде орналасқан тоқ көзінен қоректенеді;
- Аккумуляторлық батареялардан қоректенеді (электромобили) ;
- Қозғалмалы құраманың өзінде орналасқан
жылуэлектрлік
агрегаттардан қоректенеді (теплоэлектробусы) ;
- Жоғары жиеліктегі тоқ өтетін, жол астына салынатын арнайы кабель
желісі арқылы орталықтандырылған электрстанциясынан қоректенеді
(вечебусы) .
Біріктірілген
электрлі көліктері
орталықтандырылған
электрстанциясынан күштік қосалқыстанция арқылы және контактілі желі
арқылы қоректене алады, сондай ақ өзінің қорек көздерінен қоректене алады.
Егер өзінің қорек көзі ретінде аккумуляторлық батареяны қолданса оларды
контактілі электробустар деп атайды, ал егер іштей жанатын қозғалтқышты
қолданса дуобустар деп атайды.
Жер асты кабельді желіге немесе контактілі желіге тәуелсіз рельссіз
электрлі көліктерін автономды деп атайды.
Қалада электрік көліктер қолданылуына байланысты пассажирлік, жүк
және арнайы (тягачтер немесе буксирлер, қозғалмалы зертханалар, қозғалмалы
шеберханалар және тағы басқалар) болып бөлінеді.
10
Рельссіз электрлі көліктерін келесі белгілерге байланысты конструктивті
жасалуын классифициялауға болады: қабаттар саны, осьтер саны, кузов және
рама конструкциясына, күштік электрқозғалтқыштың санына және басқару
жүйесінің түріне байланысты. Қозғалмалы құрамалар сәйкесінше екі, үш, төрт
осьті болуы мүмкін, бір және екі қабатты қолданылады, жартылай және тұтас
металдан жасалады, рамалы немесе рамасыз кузов, бір, екі немесе төрт тұрақты
немесе айнымалы тоқты күштік электрқозғалтқыш болады (асинхронды),
контактілі-резисторлы
немесе
тиристорлі-импультік
басқару жүйесі.
Тиристорлы жүйені қолдану электрқуатын 30%-ға дейін үнемдеуі мүмкін.
Қазіргі уақытта троллейбустарда микропроцессорлы басқару жүйесі және
борттық техникалық диагностика құралдары кең қолданылуда.
1. 2 Троллейбустардың салыстырмалы бағасы және троллейбус
құрастырудың келешекте дамуы
Троллейбуста электрлік темір жол көліктері мен автокөлікті типті
көліктердің конструктивті бөлшектері мен агрегаттары үйлестірілген. Бүкіл
ходовой бөлігі, күштік берілісі және басқару бөліктеріде автобустың құрал-
жабдықтарымен бірдей. Күштік электрқозғалтқыш, электрлі басқару жүйесі
және электраппараттарының электрлік темір жол көліктерің құрал-
жабдықтарымен ортақ заттары өте көп.
Троллейбус
қалалық электр
көліктерінің рельссіз контактілі түрі болып келеді және қозғалуына арнайы жол
салынуын талап етпейді. Ол кала ішіндеші желіде қолданылады және орташа
дәрежедегі жолаушылар ағынына арналған.
Троллейбустар еңістігі 12% аспайтын көшелерге пайдалануға беріледі.
Троллейбустың басқа тасымал көліктерінен едәуір артықшылығы, ол
қозғалыс кезідегі дыбыссыздығы және ауаға зиянды газдарды бөліп
шығармайтындығы, бұл қаланы көркейтуде өте маңызды. Троллейбустың
жолаушыларды тасу мүмкіндігі, оның сыйымдылығынан және қозғалыс
жиелігінен сондай ақ троллейбустың тасымалдау жылдамдығына байланысты
4000-нан 1 жол/сағ тасымалдай алады.
Трамваймен салыстырғанда, троллейбус икемділік пен
басқарылымшылыққы ие, сондай ақ контактілі сымның осьтік сызығынан екі
жаққада 4, 5 метрге ауытқи алады және осының арқасында жолында тұрған
немесе алдында келе жаткан көліктен оза алады. Ал трамвай тоқтап қалған
жағдайда артындағы трамвайғада тоқтауға мәжбүр болды. Троллейбус
трамвайға қарағанда аяалдамаға келгенде тратуарға жақындайды жәнеде
осынысымен жолаушылардың қауіпсіз мініп түсуін қамтамасыз етеді.
Троллейбустың электрмен қамтамасыздандырғыш жүйесі екі сымды сондықтан
ол трамвайлардағыдай жерасты қаңғыма тоқтары пайда болмайды. Трамваймен
салыстырғанда троллейбустың кемшіліктері: салыстырмалы түрде екіполюсты
тоққабылдағышының конструкциясының күрделілігі, олар кей-кезде контакті
сымынан шығып кетіп жатады, әсіресе қиылыстар мен нұсқарларда; трамвайға
қарағанда электр қуатын көбірек шығындайды, сондықтан жолаушыны
11
тасымалдау құны жоғарырақ;
трамваймен салыстырғанда тасымалдау
мүмкіндігі аз.
Троллейбус автобустың алдында жоғарыда айтылғандармен қатар келесі
артықшылықтарға ие: ол арзан электр қуатын қолданады сондықтан
жолаушыларды тасымалдау құны арзан;
троллейбустың күштік
электрқозғалтқышы іштей жану қозғалтқышына қарағанда сенімдірек және аз
күтім қажет етеді; троллейбустың автобусқа қарағанда қызмет ету мерзімі
ұзағырақ. Троллейбустық қожалықтың ең басты кемшілігі ол қосалқы станция
мен контактілі желіге үлкен бастапқы қаржылай салыным керек. Соңғы
кемшілігі ол қала көшелерін ыбырсытады, контактілі желіге жеке желілердің
жалғануы мен қиылыс түйінінде арнайы бөліктердің болуы троллейбустың
жылдамдығын автобуспен салыстырғанда айтарлықтай төмендетеді. Осыдан
бөлек контактілі желімен байланысқан троллейбус салыстырмалы түрде
маневрлілігі аз.
Жоғарыда айтылған троллейбустың кемшіліктері құрастырушыларды
жаңа конструктивті принцип іздеуге мәжбүрлейді, көліктік кәсіпорындарда
троллейбустарды пайдалануға берудің оңтайлы әдістерін қолдануға
мәжбүрленді.
Кей елдерде заманауи троллейбустарға арнайы шарттар ойластырылып
қойылған:
- негізгі параметрлердің стандартталуы және қала автобустарымен
ыңғайлы сәйкестендірілуі тиіс;
-
сенімділіктің жоғарылатылуы және
автобуспен салыстырғанда
конструкциясының төзімді болуы;
- контактілі сымсыз автономды қозғалуы;
- электрқуатын рекуперациялай алу мүмкіндігі;
- жөндеу және түйіндер мен агрегаттарға қызмет көрсеткенде оларға қол
жетуін жақсарту;
- жүріс кезінде комфортты жоғарылату;
- конструкцияның жалпы қауіпсіздігін жоғарылату.
Троллейбус құрастырудың дамуының негізгі бағыттарын талдау бизге
келеси даму бағыттарын анықтауға мүмкіндік бері:
- троллейбустарды үшфазалы асинхронды күштік қозғалтқышпен
қамтамасыз ету, контактілі желі (750 В) жоғары кернеу көзіне өту және
электрбөлшектерді көлік төбесіне шығару;
- шығын тоқтар деңгейін бақылайтын құрылғы қондыру;
- қысқа арақашықтыққа жолаушыларды тасымалдау үшін қосалқы іштей
жану қозғалтқышты қондыру немесе аккумуляторлық батареяларды қондыру
керек;
- төмен деңгейлі еденді және тоққабылдағыштары пневматикалық
арақашықтықтан басқару бөлшекпен қамтамасыздандырылуы;
- екі түрлі күштік қондырғымен жабдықталған біріктірілген троллейбус
жасау:
күштік
электрқозғалтқыш және қуаты шамалас іштей жану
қозғалтқышы;
12
- оңашаланған жолмен жүретін аса үлкен сиымдылықты үшзвенолық
троллейбус жасау (мұндай троллейбустарға арналған жол Германия, Швеция
және Францияда бар) .
1. 3 Троллейбустың АКСМ 321 күштік электрлік жетегінің
құрылысы
Күштік электрлік жетек, микропроцессорлық басқару жүйесі бар
IGBT-транзисторлармен базаландырылған ИПТ (инвертора переменного тока)
блогынан тұрады, олар қосымша сыртқы жабдықтармен және асинхронды
күштік электрқозғалтқышпен жиынтықталған. Күштік электрлік жетек
троллейбустың күштік және тежегіштік сипаттамаларын қамтамасыс
етуге арналған.
Күштік электрлік с келесі қорғаныстарды қамтамасыз етеді: 1000А
қоректендіруші желіні қысқа тұйықталу тоғынан; 1000А күштік қозғалтқышты
қысқа тұйықталу тоғынан; Күштік жетекті 90 °С және күштік қозғалтқышты
150 °С
қызып кетуден қорғайды;
1000 В фильтрлі конденсаторды
перенапряжениядан; перегрузка тоқтарынан қорғайды; жүріс контроллерінің
істен шыққан кезде өздігінен қозғалудан қорғайды; нөлдік қорғаныс - бос жүріс
педалінің басулы кезінде қоректендіруші кернеу қайта пайда болған жағдайда
қозғалысқа тиым салу; тежегіш режимнің жүріс режимінен басымдылығы;
аккумуляторлық батареяның рұқсатсыз разрядталуынан; көліктің қозғалыс
кезінде есіктің ашылуына тиым салу; контактілі желінің арнайы бөлігінен
өткенде рекупирацияны шектеу; бұзылғанда қозғалысты шектеу; жүріс және
тежеу контроллерының жұмысының дұрыстығын бақылау.
Жұмыс режимдері:
- алдыға қозғалу режимі, 65 км/с жылдамдықта шектелген;
- артқа қозғалу режимі, 10 км/с жылдамдықта шектелген;
- алдыға қозғалу режимі, үдеуі шектелген;
- алдыға қозғалу режимі, берілген максималды моментпен шектелген;
- тежелу режимі, шектеулі үдеумен;
- тежелу кезіндегі дөңгелекті бекітуді бақылау режимі;
- екпіндеу кезіндегі дөңгелектің текке айналуын бақылау режимі;
- еңісте шегінуді бақылау режимі;
- контактілі желіге диагностикалық программаның көмегімен берілетін
тұрақтандыру кернеуімен рекуперативті тежелу режимі;
- контактілі желіде рекуперация қуатына қойылатын шарттар болмаған
кездегі, реостатты тежелу режимі;
- инвертор кірісіндегі полярностьтың дұрыстығын қамтамасыз ететін,
басқару аппараттарымен контактілі желіде полярность кернеуін анықтайтын
және полярностьтың бар-жоқтығын анықтайтын режим;
- тоқ астындағы стрелканың жүріп өту жолы режимі;
- тоқты есепке алу басқарма құрылғысымен және борттық
түрлендіргіштердің жұмысын басқару режимі;
13
- 380 В-пен қосалқы тұтынушыларды қоректендірудің коммутациялық
тоқсыздық режимі;
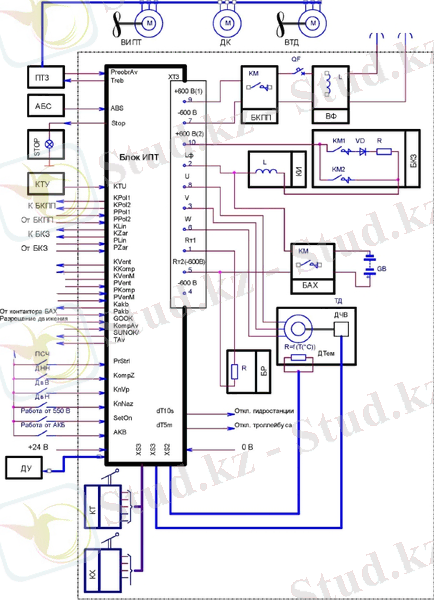
Жетектің функционалды сұлбасы 1. 1- суретте көрсетілген.
Функционалды сұлбада келесі қысқартулар мен белгілер қолданылды:
АБС - дөңгелекті антиблокодалық жүйесі (антиблокировочная система
колес) ;
БАХ - автономды жүріс блогы (блок автономного хода) ;
Блок ИПТ - айнымалы тоқ инверторының блогы (блок инвертора
переменного тока) ;
БКПП - полярлылық контактілерінің
блогы (блок контакторов
полярности) ;
БКЗ - заряд контактілерінің блогы (блок контакторов заряда) ;
БР - тежегіш резисторлардың блогы (блок резисторов тормозных) ;
ВИПТ - ИПТ блогының желдеткіші (вентилятор блока ИПТ) ;
ВТД - күштік электрқозғалтқыштың вентиляторы (вентилятор тягового
электродвигателя) ;
ВФ - кіріс фильтрі (входной фильтр) ;
ДвВ - қозғалыс бағытын таңдайтын қосқыш ВПЕРЕД (переключатель
выбора направления движения ВПЕРЕД) ;
ДвН - қозғалыс бағытын таңдайтын қосқыш НАЗАД (переключатель
выбора направления движения НАЗАД) ;
ДК - компрессор қозғалтқышы (двигатель компрессора) ;
ДНН - пневматикалық жүйедегі төмен қысым датчигінің контактісі
(контакт датчика низкого давления в пневматической системе) ;
ДТем - күштік электрқозғалтқыштың температура датчигі (датчик
температуры тягового электродвигателя) ;
ДУ - диагностикалық құрылғы (диагностическое устройство) ;
ДЧВ - күштік электрқозғалтқыштың айналу жиелігінің датчигі (датчик
частоты вращения тягового электродвигателя) ;
КИ - индуктивтілік катушкасы (катушка индуктивности) ;
КХ - жүріс контроллері (контроллер хода) ;
КТ - тежегіш контроллері (контроллер торможения) ;
КТУ - жылыстау тоғын басқару құрылғысы (устройство контроля токов
утечек) ;
ПСЧ - қоректендіргіш желінің арнаулы бөлімін ауыстырып қосу өтпесі
(переключатель проезда спецчастей питающей сети) ;
ПТ3 - 600 В тұрақты тоқты 380 В айнымалы тоққа түрлендіргіш
(преобразователь 600 В постоянного тока в 380 В переменного тока) ;
ТД - күштік электрқозғалтқыш (тяговый электродвигатель) ;
GB
-
автономды жүрістің
аккумуляторлық
батареялары
(аккумуляторные батареи автономного хода) ;
STOP - тежелу кезіндегі СТОП сигналының артқы шамдары (задние
фонари сигнала СТОП при торможении) ;
QF - автоматы ажыратқыш (автоматический выключатель) ;
14
XA1(+) XA2(-)
Сурет 1. 1 - Сыртқы қосалқы құрал-жабдықпен жабдықталған жетектің
функционалды сұлбасы
15
ВФ
блогы рекуперация мен қоректенуші тоқтың айнымалы
құраушыларын төмендетуге, сондай ақ опдтокедергілерді басуға арналған.
БР блогы контактілі желіде тұтынушылардың қуаты жеткіліксіз немесе
жоқ болса тежегіш электр энергиясын сейілтуге арналған, желідегі кернеудің
қойылған нормадан жоғардаған кезде жетектің күштік қондырғыларды
қорғайды, сондай ақ нұсқаушаны солға қарай қозғалу кезінде керек мөлшердегі
тоқпен қамтамасыз етеді. БР блогының активті кедергісі 1, 35 Ом құрайды,
қалыпты қуаты 25 кВт.
БКПП блогы «мост» тәріздес 4 контактіден тұратын сұлба және дұрыс
полярлы кернеуді жетекке камутациялау үшін арналған, сонымен қатар жетек
пен троллейбустың қондырғыларын апаттық жағдайда қорғайды.
БКПП блогы троллейбус электрқондырғыларын шығын тоқтарын
анықтағанда қорек көзінен ажыратады.
БКЗ блогы 2 контактіден, резистордан және диодтан тұратын сұлба.
Оның мақсаты R шектеуіш резисторының тізбектегі зарядын КМ1 контакторын
қолдану арқылы ИПТ блогының сүзгішті конденсаторның бастапқы зарядын
жүзеге асыру, сызықты КМ2 контакторының кейін қосылуы арқылы.
БАХ блогы ИПТ блогына бағытталған GB аккумулық батарейлардың
маневрлі автономды жүрістерін жүзеге асыруға арналған, жетек пен
троллейбустың төменвольтты тізбектерін жоғары кернеуден қорғайды.
КИ троллейбустың қосалқы күштік қондырғыларындағы айнымалы тоқ
құрауыштарын төмендетуге арналған, сондай ақ радиокедергілерді басуға
арналған.
КХ оптоэлектрлік түрлендіргіш болып табылады, жүріс педалінің қалпы
Грей кодында және күштік қозғалтқыштың жүріс моментінің мәнін көрсетуге
арналған.
КТ оптоэлектрлік түрлендіргіш болып табылады, тежегіш педалінің
қалпы Грей кодында және күштік қозғалтқыштың тежеу моментінің мәнін
көрсетуге арналған.
ИПТ блогы келесілерге арналған:
-
контактілі желідегі тұрақты кернеуді айнымалы амплитудалы тоққа
және жиелікке, күштік электрлі қозғалтқышты қоректендіруге арналған;
-
электр энергиясын тежелу режимінде рекуперациямен қамтамасыз
етеді.
ИПТ блогы келесілерді өз құрамына қосады: СБ күштік элементтері бар
радиатор, басқару драйверлері және күштік кілтердің қорғанысы және
тиристорлар, температура құрылғылары BK1, BK2 и RK, сүзгілі конденсатор
инверторлары С, кернеу датчиктері ДН1, ДН2 және тоқ датчиктары ДТ1 . . . ДТ3.
VS
тиристорлары
келесі жағдайларда контактілі желіге электр
энергиясының рекуперациясын болдырмауға арналған:
- контактілі желіде қысқа тұйықталу болғанда;
- контактілі желіде кернеу жоқ болғанда.
16
VS тиристорлары сөндірілгенде электрлі тежелу реостатты болады. VS
тиристорлары
R-C
тізбекпен қорғалған,
олар
коммутациялық
перенапряжениелерді тегістеуге арналған.
Сондай ақ ИПТ блогының құрамына келесілер кіреді: қоректендіру
блогы БП, ол ДРР1 . . . ДРР7 драйверлерін айнымалы кернеумен 18 В және
жиелігі 25 кГц қоректендіреді, датчиктер ДН1, ДН2, ДТ1 . . . ДТ3 тұрақты
екіполярлы кернеумен 24 В және түрлендіргіш ПСДТ тұрақты кернеумен +24
В. ИПТ блогының негізгі элементі БУ басқару блогы болып табылады.
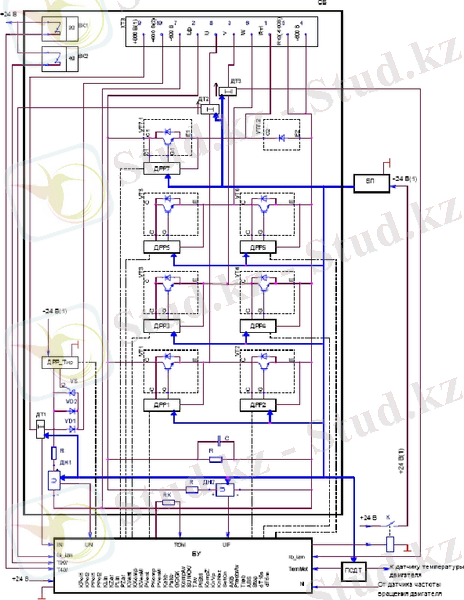
ИПТ блогының функционалды сұлбасы 1. 2-суретте көрсетілген.
Функционалды сұлбада келесі қысқартулар мен белгілер қолданылды:
БУ - ИПТ басқару блогы (блок управления ИПТ) ;
БП - қоректендіру блогы (блок питания) ;
ДРР1…ДРР7 - инвертордың күштік кілттің драйверлері (драйвера
силовых ключей инвертора) ;
ДРР_Тир - тиристор драйвері (драйвер тиристора) ;
ДТ1 - контактілі желіден қоректенетін тоқ датчигі (датчик тока
потребляемого из контактной сети) ;
ДТ2, ДТ3 - күштік қозғалтқыштың фазасындағы тоқ датчигі (датчики
тока в фазах тягового двигателя) ;
ДН1 - контактілі желінің кернеу датчигі (датчик напряжения контактной
сети) ;
ДН2 - күштік блок инверторындағы сүзгілі конденсаторының кернеу
датчигі (датчик напряжения на фильтровом конденсаторе инвертора силового
блока) ;
ПСДТ - күштік қозғалтқыштың температура датчигінің сигналын
түрлендіргіш
(преобразователь сигнала датчика температуры тягового
двигателя) ;
СБ - күштік блок (силовой блок) ;
С - инверторындағы сүзгілі конденсатор (фильтровой конденсатор
инвертора) ;
BK1 - 90 °С температурада іске қосылатын термоконтакт (термоконтакт
с температурой срабатывания 90 °С) ;
BK2 - 40 °С температурада іске қосылатын термоконтакт (термоконтакт
с температурой срабатывания 40 °С) ;
RK - терморезистивті датчигі (терморезистивный датчик) ;
VS - рекуперация тиристоры (тиристор рекуперации) ;
VT1…VT6 - инвертордың күштік кілттері (силовые ключи инвертора) ;
VT7 - тежегіштік реостаттар блогының күштік кілті (силовой ключ
блока тормозных реостатов) ;
17
Сурет 1. 2 - ИПТ блогының функционалды сұлбасы
18
2 Электржетектің сипаттамалары және негізгі параметрлерін есептеу
2. 1 Орын басу сұлбасының параметрін және қозғалтқыштың
қосымша параметрін анықтау
Троллейбус электржетегінде ДТА-1У1
асинхронды күштік
... жалғасыСіз бұл жұмысты біздің қосымшамыз арқылы толығымен тегін көре аласыз.
- Іс жүргізу
- Автоматтандыру, Техника
- Алғашқы әскери дайындық
- Астрономия
- Ауыл шаруашылығы
- Банк ісі
- Бизнесті бағалау
- Биология
- Бухгалтерлік іс
- Валеология
- Ветеринария
- География
- Геология, Геофизика, Геодезия
- Дін
- Ет, сүт, шарап өнімдері
- Жалпы тарих
- Жер кадастрі, Жылжымайтын мүлік
- Журналистика
- Информатика
- Кеден ісі
- Маркетинг
- Математика, Геометрия
- Медицина
- Мемлекеттік басқару
- Менеджмент
- Мұнай, Газ
- Мұрағат ісі
- Мәдениеттану
- ОБЖ (Основы безопасности жизнедеятельности)
- Педагогика
- Полиграфия
- Психология
- Салық
- Саясаттану
- Сақтандыру
- Сертификаттау, стандарттау
- Социология, Демография
- Спорт
- Статистика
- Тілтану, Филология
- Тарихи тұлғалар
- Тау-кен ісі
- Транспорт
- Туризм
- Физика
- Философия
- Халықаралық қатынастар
- Химия
- Экология, Қоршаған ортаны қорғау
- Экономика
- Экономикалық география
- Электротехника
- Қазақстан тарихы
- Қаржы
- Құрылыс
- Құқық, Криминалистика
- Әдебиет
- Өнер, музыка
- Өнеркәсіп, Өндіріс
Қазақ тілінде жазылған рефераттар, курстық жұмыстар, дипломдық жұмыстар бойынша біздің қор #1 болып табылады.

Ақпарат
Қосымша
Email: info@stud.kz