Сым созатын станының автоматтандырылған электр жетегінің басқару жүйесін жетілдіру: математикалық модельдеу, динамикалық бағдарламалау және қауіпсіздік-экономикалық талдау

АҢДАТПА
Дипломдық жұмыс «Сым созатын станының автоматтандырылған электр
жетегінің басқару жүйесін жетілдіру» тақырыбына арналған. Оған келесі
бөлімдер кіреді: негізгі бөлім; өмір тіршілік қауіпсіздік; экономикалық бөлім.
Негізгі бөлімде стан динамикасын зерттеуге және оны динамикалық
бағдарламалау әдісі арқылы басқару заңын анықтау үшін қолдануға мүмкіндік
беретін станның математикалық модельі қалыптастырылған, оңтайландыру
критериі таңдалған, стан динамикасының тұрақтылығын анықтау бағдарламасы
әзірленген және басқару заңының өзгеру коэффициенттері анықталып,
сымтемірді талшықтаудың технологиялық процессі, талшықтау стандарының
құрылымы қарастырылған және талшықтау стандарының түрлері
салыстырылған.
Дипломдық жұмыстыстың өмір тіршілік қауіпсіздігі бөлімінде сым
созатын станының еңбек қорғау шаралары, техникалық қорғау шаралары,
жұмыс бөлмесіндегі ауа алмасу жүйесіне есеп жүргізу және металл өңдеу
цехындағы өрттің алдын алу бойынша жүргізілетін шаралары есептелген.
Дипломдық жұмыстың экономикалық бөлімінде металл өңдейтін станның
автоматтандырылған электр жетегінің экономикалық тиімділігі қарастырылған.
АННОТАЦИЯ
Дипломная работа выполнен на тему «Разработка системы управления
АЭП волочильного стана». В него входят следующие разделы: основная часть;
безопасность жизнедеятельности; экономическая часть.
В основной части создана математическая модель стана, позволяющая
исследовать динамику стана и использовать её для определения закона
управления методом динамического программирования, выбран критерий
оптимальности, разработана программа определения устойчивости динамики
стана, определены коэффициенты изменения закона управления. Так же
рассматривается технологический процесс волочения проволоки, конструкция
волочильных станов, сравниваются типы волочильных станов.
В дипломной работе в
разделе безопасность жизнедеятельности
произведен анализ меры по технологической защите, воздухо обмен в рабочем
помещении, предотвращение огня в цеха и меры по
защите труда волочильного стана.
В
дипломной работе в
разделе
экономика рассмотрена
экономическая эффективность автоматизированного
стана.
электропривода
Кіріспе
Қазіргі таңда электр жетегі жүйесін басқарудың оңтайлы математикалық
теориясының негізінде оңтайлы реттеуіштерді аналитикалық құрылымдау
тәртібі қарастырылған. Реттеуіштерді аналитикалық құрылымдау қазіргі
заманғы реттеуіштердің күрделі жүйелерін жобалауда кеңінен қолданылады.
Тұрақты тоқ машиналарының математикалық теорияларының және
басқару теорияларының, бағдарламалық қамтамасыздандырудың, есептеу
техникасының қарқынды дамуына байланысты тікорамды созғылау станының
тұрақты тоқ көпқозғалтқышты электржетегінің реттеуішін басқару заңын
анықтау мүмкіндігі туындайды. Бұл жерде станның көпқозғалтқышты
электржетегі көбінесе бекітілген режимде жұмыс жасайды деп болжалады.
Сондықтан реттеуіштің басқару заңын анықтауды тұрақтандыру міндетіне
жатқызуға болады. Аталған мәселе максимумның классикалық вариациялық
есептеуі мен қағидасына қарағанда тұйық нысанада шешім алуға мүмкіндік
беретін динамикалық бағдарламалау әдісінің көмегімен сәтті шешілуі мүмкін.
Тікорамды созғылау станының реттеуішін аналитикалық құрылымдау созғылау
станының екі қозғалтқышты тұрақты тоқ электржетегіне арналған.
Тұрақты тоқ екі қозғалтқышты электржетегінің математикалық моделі
алынды, оңтайландыру өлшемдері таңдалған және тікорамды созғылаушы
станның көпқозғалтқышты электржетегі динамикасының ауысымды процессін
оңтайландыруға және энергия үнемдеуге мүмкіндік беретін тікорамды
созғылаушы станның оңтайлы реттеуішінің басқару заңының параметрлері
есептелген.
Дипломдық жобаның басты мақсаты созғылаушы станның тұрақты тоқ
қозғалтқышының реттеуішін аналитикалық құрылымдау болып табылады.
Жалпы алғанда дипломдық жобада созғылаушы станның түрлерін, жұмыс істеу
қағидаларын және
ағынды қозғауышпен басқарылатын тұрақты тоқ
қозғалтқышының математикалық сипаттамасын қарастыру көзделіп отыр.
1 Автоматты реттеуіштер
Басқару объектісіне қосылатын және реттелуші параметрді берілген
деңгейде ұстап тұру немесе берілген басқару алгоритмі бойынша өзгеруіне
арналған автоматика құралдарының жиынтығын автоматты реттеуіш деп
атайды. Басқару алгоритмі басқарылушы объектіде технологиялық процессті
дұрыс орындау үшін қажетті нұсқамалардың жиынтығын құрайды.
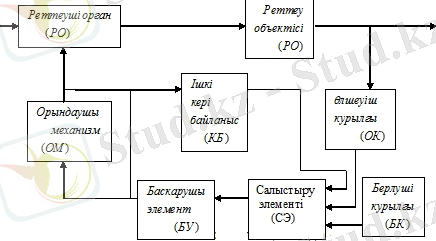
Бағытталуы мен құрылғысына қарамастан реттеуішті жалпы
функционалдық-құрылымдық сұлба
арқылы
келтіруге болады. Реттеуіш
өлшеуіш құрылғыдан тұрады - бірінші қайта қалыптастырушы (ҚҚ), беруші
құрылғы (БҚ), салыстыру элементі (СЭ), басқарушы элемент (БЭ), атқарушы
механизм (АМ) және ішкі кері байланыс (ІКБ) .
Алғашқы қайта қалыптастырғыш (ҚҚ) өлшеуіш орган бола тұра,
реттелуші шаманы және оның басқарушы сигналға қайта өзгеруінің нақты
маңызын өлшеуге арналған. Беруші құрылғы (БҚ) оның көмегімен реттелуші
шаманың талап етілетін мағынасы берілетін элементті білдіреді. Салыстыру
элементі (СЭ) реттелуші шаманың нақты және берілген мәнін салыстыруға
мүмкіндік береді. Басқару элементі (БЭ) салыстыру элементінің шығу
сигналының қуатын күшейтуге арналған. Атқарушы механизм (АМ), ол арқылы
реттеуіш реттелуші параметрдің берілген мағынасын ұстап тұру үшін реттеуші
органға әсер ететін құрылғы болып табылады.
Ішкі кері байланыс (ІКБ) реттеу заңын қалыптастыру үшін қолданылады.
Реттеуіш реттелуші объектімен (РО) бірге реттеудің автоматты жүйесін
құрайды (АРЖ) .
1. 3 Сурет - Автоматты реттеу жүйеснің функционалды - құрылымдық
сұлбасы (ҚАР)
1. 1 Автоматты реттеуіштердің жіктелуі
Реттеуіштерді жіктеудің негізгі белгілері болып мыналар табылады:
реттелуші шаманың түрі, қолданылатын энергияның түрі, конструктивті
орындау, реттеу қағидасы, басқару алгоритмі, объектіге әсер ету тәсілі және
реттеу заңы.
Реттелуші шаманың түрі. Бұл түрдегі реттеуіштер шығынды, жүктемені,
температураны, ылғалдылықты, жылдамдықты, қуатты және тағы да
басқаларды реттеуіштер болып бөлінеді.
Қолданылатын энергияның түрі. Бұл түрдегі реттеуіштер тікелей немесе
тікелей әсер етпейтін реттеуіштер болып бөлінеді. Тікелей әсер етуші
реттеуіштерде қоректену блогі жоқ, ал атқарушы органдардың қызметі үшін
басқарылатын ортадан алынатын энергия жеткілікті болып табылады. Мысалы,
трубопровод арқылы сұйықты беруді сұйықтық деңгейін ауыстырудағы
қалықпамен орын ауыстырылатын клапандарды өзгерту арқылы реттейді.
Тікелей әсер етпейтін реттеуіштерде жекеленген тораптар энергияның
қосымша көздерінен қоректенеді. Мұндай реттеуіштерді электрлік,
механикалық, гидравликалық, пневматикалық және аралас етіп бөледі.
Конструктивтік атқару. Реттеуіштер аспапты, аппаратты және агрегатты
болуы мүмкін. Аспап түріндегі реттеуіштерде басқарушы сигналдың шығуын
қалыптастыратын құрылғы өлшеуіш аспапқа орнатады, мысалыэлектронды
потенциометр, автоматты көпір, өлшеуіш логометр және т. б. Көрсеткіш немесе
бақыланатын шаманы кері қайтарумен бір уақытта басқару сигналын шығару
жүзеге асырылады.
Аппаратты түрдегі реттеуіштер тек басқару сигналын ғана шығарады.
Олардың корпусына өлшеуіш қайта қалыптастырғыш пен басқарушы органды
қоспағанда барлық тораптарды орналастырады. Олар түрлі физикалық
шамаларды өлшеуге арналған және тек өлшеуіш блоктары арқылы
ажыратылады. Сондықтан конструктивті қағидаға электронды реттеуіштер
орнатылады.
Агрегат түріндегі реттеуіштерде күшейтуші-қайта қалыптастырғыш торап
өлшегіш, қайта орнатқыш пен берілетін сигналдарын салыстыру, сондай-ақ
шығу сигналын қалыптастыру функциясын атқаратын жеке блок түрінде
орындалған. Бұл блок сигналдары шығуында да, кіруінде де
бірыңғайландырылған. Осы қасиетіне байланысты олар әмбебап, яғни олар
әртүрлі параметрлерді реттеу үшін бір ғана күшейтуші
-
қайта
қалыптастырушы органды пайдалануға мүмкіндік береді. Пневматикалық
реттеуіштерді агрегаттық қағида бойынша орындайды.
Реттеу қағидасы. Бұл түрдің реттеуіштерін үш топқа бөледі:
ауытқушылығы, ұйтқуы бойынша реттелушілер және аралас. Ауытқушылық
бойынша реттелу қағидасымен әрекет ететін реттеуіш басқарылатын шаманың
берілген мағынадан ауытқушылығын өлшейді және атқару блогі арқылы
басқару объектісіне әсер етеді.
Ұйытқу бойынша реттеу қағидасы басқару пайда болған ұйытқушылық
әсердің мағынасы бойынша орындалатынын білдіреді. Ұйытқу бойынша
басқару қағидасының артықшылығы ұйытқу әрекетінің зиянды әсері
басқарылатын шаманың ауытқушылығы болғанға дейін жойылатындығынан
көрініс табады.
Реттеудің аралас қағидасы ауытқу мен ұйытқу бойынша басқару
қағидаларын біріктіреді. Ұйытқу бойынша әсер ету тізгінін әдетте
ауытқушылық бойынша реттеу жүйелеріндегі қосымша байланыс ретінде
қолданады. Ұйытқу бойынша қосымша байланыс әдетте басқарушы шаманың
ауытқушылығының шегінің азаю немесе реттеу процессін тездету үшін
арналады.
Басқару алгоритмі. Бұл түрдегі реттеуіштер тұрақтандырғыш,
бағдарламалық, іздеуші және адаптивті болып бөлінеді.
Тұрақтандырғыш реттеуіште басқару алгоритмі басқарылушы шаманы
берілген деңгейде ұстап тұруға арналған нұсқамасын иеленеді. Статикалық
режимдегі тұрақтандырғыш реттеуіш y шығу шамасының x кіру шамасына
нақты тәуелділігімен сипатталады. Ол келесі теңдеумен сипатталады:
Егер барлық басқару аумағында коэффициенттер δ ꞊ 0 және Кст = 0
болса, онда басқару мен реттеуді астатикалық деп атайды. Егер δ ≠ 0 және Кст ≠
0 болса, онда басқару мен реттеуді статикалық деп атайды.
Статиткалық және астатикалық басқарудың сипаттамасын әдетте
графикалық бір сызық ретінде ұсынады. Шын мәнінде реттелуші шаманың
нақтыланған өзгеру аймағы болады. Оның ені ең бастысы өлшеуіш қайта
қалыптастырушылардың кіші у ауытқуына сезгіштік еместігіне байланысты
болатын € автоматты жүйесіне сезгіштігінің жоқ екендігін көрсетеді.
Жүйенің сезімталдылық еместігін ескеріп басқару сипаттамасын
келесідей теңдеумен көрсетеді:
Астатикалық реттеуде ∆(x) ꞊ 0, яғни басқарылушы шама басқару
объектісінің режиміне қарамастан тұрақты мағынасын сақтайды.
Бағдарламалық автоматты реттеуіш деп алдын ала берілген функцияға
сәйкес басқару алгоритмінде басқарылушы шаманы өзгерту нұсқаулығы бар
реттеуішті айтады.
Іздеуші автоматты реттеуіштер ретінде басқару алгоритмі алдын ала
белгісіз шаманың кірістегі өзгеруіне байланысты басқарылатын шаманы
өзгерту бойынша нұсқаулықты құрайтын реттеуішті атайды.
Адаптивті реттеуіш тек берілген басқару алгоритміне ғана емес, сонымен
қатар тиімді режимге қол жеткізу мақсатында бұл алгоритмді нақты жағдайда
жеке өзі түзете алады.
1. 2 Басқару объектісіне әсер ету сипаттамасы
Бұл түрдегі реттеуіштерді үздіксіз, импульсті және релелі әрекеттер деп
бөледі. Үздіксіз(пропорционалы) әсер ету реттеуіші реттеу процессінде у
сигналы оның шығуы кезінде үздіксіз уақыт функциясы және кіруде х
шамасына пропорционалды әсер етуші ретінде сипатталады.
Импульсивті әсер ету реттеуішінде реттеу процессінде шығарылым
басқарушылық әсер етуші у параметрлері (амплитуда, ұзақтығы және жиелігі)
нақты жағдайда х кіру шамасымен байланысты импульстің кезектілігін
құрайды.
Релелік әсер ету реттеуіші басқару процессі кезінде у сигналдары оның
шығуы кезінде кірістің х шамасына тәуелді екі немесе үш нақты мағынаға ие
болатындығымен сипатталады.
Реттеуіштің бұл түріне жайғасымды
(позиционды) басқару реттеуіштері жатады. Екі жайғасымды реттеуіш тек екі
тұрақты жағдайға ғана ие болады: біріншісі, басқарылатын шама ауытқуы
дұрыс шектен + ∆ асып кеткен жағдай және екіншісі ауытқу белгісі өзгерген
және жағымсыз шекке - ∆ жеткен жағдайда. У басқарушы әсер ету мағынасы
жағынан екі жағдайда да бірдей, бірақ белгілері бойынша әртүрлі.
Басқарылуышы шаманың + ∆ - ден - ∆ дейін ауытқу диапозонында реттеуіш
бейтарап жағдайында болады.
Реттеу заңы бойынша үздіксіз әсер ету реттеуіштері пропорционалды,
интегралды, пропорционалды-интегралды, пропорционалды-дифференциалды
және пропорционалды-интегралды-дифференциалды болып бөлінеді.
х түрлі әсер ету реттеуіштерінің кірісі өзгерген кездегі у шығу
шамасының өзгеру диаграммасы:
А - үздіксіз; б- импульсті; в-екі жайғасымды; г - үш жайғасымды
Реттеу заңдары. Реттеуішті таңдау деп әдетте қажетті реттеу заңын
анықтауды түсінеді. Осы заңға сәйкес кез-келген конструктивті орындау
реттеуіштері аталған объектіге ұқсас реттеу сапасының көрсеткіштерін алуға
мүмкіндік береді. Ең қарапайым реттеуіш ретінде пропорционалды әсер ету
реттеуіші табылады (П-реттеуіштері) .
Пропорционалды П-реттеуіштері ретінде
∆ у кіріс
∆х
өзгерісіне
пропорционалды болатын өзгерістерді айтады, яғни
∆ у = кр ∆х,
Онда кр - реттеуіштің басптау параметрі болып табылатын берілісті
күшейу коэффициенті.
Реттеуіштердің динамикалық ерекшеліктері берілісті функциялары
арқылы анықталады. П - реттеуіші үшін
Әдетте баптау параметрі ретінде (% пен) ⱪ кері коэффициентін санайды.
және оны пропорционалдылықтың шегі деп атайды (немесе реттеу аймағы) .
Бұл параметр аталған реттеу жүйесіне максималды мүмкін болатын реттелуші
шаманың ауытқушылығының қайсысына реттеуші органның бір ұшқарылықтан
екіншісіне ауысуына сәйкес келетінін көрсетеді.
П
- реттеуішімен автоматты реттеу жүйесіне берілген мағынадан
(статикалық қате) реттелуші шаманың қалдық ауытқуы тән. Алайда
пропорционалдық шегі жоғары болған сайын статикалық қате де жоғары.
Тиісінше, тікелей және тікелей әсер етпейтін П - реттеуіштерін техникалық
жағдайлар бойынша реттеудің статикалық қатесіне жол берілетін
объектілерінде қолдануға болады.
Интегралды (И-реттеуіштері) реттеуіштер ретінде берілген мағынаның ∆ у
шығу шамасының өзгеруі
∆х кіріс шамасының ауытқушылығының
интегралына пропорционал болатын реттеуіштерді айтады:
Интегралды реттеуіштерде объектіге реттеуіш тарапынан әсер ету
белгіленген мағынадағы реттелуші параметрдің ауытқушылығын жойғанға
дейін әсер ету болмайды. Яғни реттеуіш басқарылатын параметрдің бекітілген
деңгейде қатаң ұстап тұруды қамтамасыз етпейінше объектіге реттеуіш
тарапынан әсер ету болмайды. Тиісінше, И-реттеуіштері астатикалық сипатқа
ие. Интегралдық реттеуіштің кемшілігі болып кері пропорционалды тұрақты Tp
уақытындағы реттеу жылдамдығының салыстырмалы төмендігі табылады. Бұл
реттеуіштер өзіндік тегістеу қасиеті жоқ объектінің параметрлерін тұрақты
реттеуді қамтамасыз ете алмайды.
Пропорционалды-интегралды реттеуіштер деп ∆ у шығыс шамаларын
өзгерту ∆х кіріс шамасының өзгеруіне және оның өзгеру интегралына
пропорционалды болатын реттеуіштерді айтамыз:
Реттеуіш схемасында интегралды құрамаларды алу үшін кері байланысты
қосу керек, яғни ол кейінгі элементтердің алдынғы элементтерге ықпал етуші
арнайы құрылғы. Кері байланыстың арқасында бір шаманың өзгеруі
басқаларының да өзгеруіне алып келеді. Сондықтан, кері байланыс әрекетінің
реттеу процессіне әсерін білу үшін оң және теріс кері байланысты ажыратады.
Оң кері байланыс кері байланыспен қамтылған буынның жиынтық әсерін
азайтса, ал теріс кері байланыс көбейтеді, яғни олар қайта құрылуының
жиынтық коэффициентін төмендетеді немесе жоғарылатады.
ПИ-реттеуішінің реттеу процессінің басында статикалық жүйелердегі
сияқты басқарушылық әсер ету реттелетін шаманының ауытқушылығымен
жүргізіледі. Ал, аусымды процессінде, әсіресе аяғында ауытқушылықты нөлге
теңейтін интегралдың ауытқушылыққа әсері жоғарылайды. Жалпы кері
байланыс реттеудің астатикалық сипатын қамтамасыз етеді. ПИ-реттеуіштер
пропорционалды және интегралды реттеуіштердің қасиеттерін біріктіреді,
сондықтан оларды әртүрлі технологиялық параметрлерді басқару үшін кеңінен
пайдаланады.
Пропорционалды-дифференциалды (ПД-реттеуіштер) реттеуіштер
ретінде ∆ у шығыс шамаларын өзгерту ∆х кіріс шамасының өзгеруіне және оның
өзгеру жылдамдығына пропорционалды болатын реттеуіштерді айтамыз:
ПИД-реттеуіштерді изодромды реттеуіштер деп те атайды, себебі олар
дифференциалды құрамалардың арқасында реттелуші шамалардың өзгеруіне
сезімтал болып келеді. Кіріс шамасы жоғарылағанда оның өндірілуі күрт арта
түседі және екі басқа әсер етулермен жиынтықталып реттеуіштің объектіге
әсерін тездетеді. Ол өз кезегінде берілген мағынадан басқарылатын
параметрдің ауытқушылығының азаюына қолайлы әсер етеді. Кіріс шамасының
азайып бастауымен оның туындысы теріс болады. Ол пропорционалды және
интегралды буындардың жиынтық әсер етуінің азаюына және пайда болған
ауытқушылықты біртіндеп жоюға көмектеседі.
Осылайша, дифференциалды буын жүйенің тербелістерге бейімділігін
азайтады, ал интеграциялық буын - статикалық қатенің болуын азайтады. Яғни,
ауытқушылықтан болатын туынды ауысымды режимде, ал интеграл -
статикалықта реттеу процессін жақсартады.
ПИД-реттеуіштері жоғары инерциялы және реттелуші шамалардағы
ауытқушылықтың қалдығын болдырмайтын объектілерде, сонымен қатар, көлік
кешігуі және басқарылатын параметрге кенеттен өзгермелі әсер ететін
объектілеріндегі параметрлерді басқаруға арналған.
2 Керілуге қарсы тура ағынды созғылау стандарының реттеуішін
аналитикатилық құралымдау
2. 1 Ауысымдық өту процессінің сапалық критериилері
Реттеуіштерді аналитикалық конструкциялау теориясытехниканың
көптеген міндеттерін шешуде көп қолданылатын теориялардың бірі болып
табылады. Алғашқы реттеуіштерді аналитикалық конструкциялау идеясы 1960
жылы А. М. Летовпен қозғалған болатын . Бұл идеяларды қолданбастан бұрын
реттеуіштерді конструкциялаумен байланысты сұрақтардың мәнін
қарастырайық. Келесідей көрсеткішке алып келетін реттеу жүйесі синтезінің
дәстүрлі сұлбасы бар.
Басқару обьектісі және реттеу сапасының көрсеткіштерінің теңдеуі
арқылы реттеуіш таңдалады. Егер таңдалған реттеуішпен анықталған сапа
қанағаттандырылмаған болса, онда түзету тізбектері синтезделеді. Реттеу
жүйесінің синтезі түзету тізбегін таңдау кезінде орын алады. Аталған синтез
сұлбасы кең таралды, ал синтездеу әдістері үздіксіз даму үстінде.
Синтездеу әдістемесі сызықты, сызықсыз және серпінді жүйелерге,
кешігуші және анықталған параметрлі жүйелерге таралды. Алайда, реттеуіш
синтездеу мәселесін шешуге бағыттайтын жаңа идеялар пайда болды. Бұл
идеялар реттеуішті аналитикалық конструкциялау теориясына енгізілді. Оның
мәні басқару координаты мен басқарушы әсер етудің өзгеру заңдылығы басқару
әсерін таңдауды ықшамдау қажет J (х, u) функционалының кейбір түрі арқылы
болатынынан көрінеді. Реттеуіш u(t) немесе u(х) басқару алгоритімін біле
отырып құрылымдалады. Реттеуішті аналитикалық конструкциялау кезінде
оптималдық критерииін таңдау таңдау ерекше маңызға ие болады. Кез-келген
басқару обьектілеріне қолданылатын жалпы оптималдылық критериилерінің
болуы мүмкін емес. Әрбір басқару обьектісінің өзінің сапалық критерииі
болады. Басқару обьектісінің ауысымды процессі сапасының квадраттық
критерииі көп қолданылады.
2. 1. суретінде көрсетілген а және б ауысу процессінің қисығы бірреттік
секіртпе түрінде басқарушылық әсер ету кезіндегі тұйық реттеу жүйесіндегі
қателіктердің өзгеруін көрсетеді. Бұл
интегралымен сипатталады.
∞
J 1 = ∫ xdt = min .
ауысу процессінің қисығы түр
(2. 1)
0
Бұл интеграл тез әрекет ететін басқару жүйесінің оптималды анализы
кезінде қолданылады. Ол 2. 2. а суретінде литрихталған ауданды көрсетеді.
Неғұрлым процесс тез өтсе соғұрлым аудан аз болады және тиісінше J1
шамасы да төмен болады. Сонымен, J1 шамасы белгілі бір мөлщерде басқару
жүйесінің сапасын сипаттайды. Аталған критерии ең қарапайым ьолып
табылады. Алайда оның да кемшілігі бар. Енді тербелмелі ауысымды процесс
көрсетілген 2. 1. б суретін қарастырайық.
J1 шамасының оңы телімдер жоққа шығарумен қарымталанатындықтан
төмен болуы мүмкін.
J1 шамасының төмендігіне қарамастан басқару жүйесіндегі процесс кейде
ұзақ және тез тербелмелі болады. Ал мұндай процесстердің болуының
қажеттілігі шамалы. Сондықтан келесідей сапаның квадраттысы критерийі
ұсынылды.
∞
J 2 = ∫ x 2 dt = min .
(2. 2)
0
Мұндай критерий х квадратының шектелген қисығының ауданын
сипаттайды. (2. 1, в -суреті) . Бұл жерде процесстің тербелісі ескеріледі. Алайда
процесстің тербелмелі немесе біркелкі екендігі туралы айтуға болмайды. J2
шамасының үлкен бағалауы ұзақ әрі жатық процесске, ал аз шамасы тербелмелі
әрі тез процесске сай келеді. Өндірістік обьектілерді басқаруда жеке түйіндерде
жоғары жүктемені болдырмайтын жатық процесстерге қолдау көрсетеді.
Сонымен қатар, түр критерийлері басқару жүйесіндегі ауысу процесстері
туралы толық ақпарат бере алмайды. (2. 2. )
J2 критерийінің кемшіліктерін ескере отырып жалпыланған интегралды
критерий ұсынылған болатын.
∞
JV = ∫ Vdt = min
0
(2. 3)
... жалғасыСіз бұл жұмысты біздің қосымшамыз арқылы толығымен тегін көре аласыз.
- Іс жүргізу
- Автоматтандыру, Техника
- Алғашқы әскери дайындық
- Астрономия
- Ауыл шаруашылығы
- Банк ісі
- Бизнесті бағалау
- Биология
- Бухгалтерлік іс
- Валеология
- Ветеринария
- География
- Геология, Геофизика, Геодезия
- Дін
- Ет, сүт, шарап өнімдері
- Жалпы тарих
- Жер кадастрі, Жылжымайтын мүлік
- Журналистика
- Информатика
- Кеден ісі
- Маркетинг
- Математика, Геометрия
- Медицина
- Мемлекеттік басқару
- Менеджмент
- Мұнай, Газ
- Мұрағат ісі
- Мәдениеттану
- ОБЖ (Основы безопасности жизнедеятельности)
- Педагогика
- Полиграфия
- Психология
- Салық
- Саясаттану
- Сақтандыру
- Сертификаттау, стандарттау
- Социология, Демография
- Спорт
- Статистика
- Тілтану, Филология
- Тарихи тұлғалар
- Тау-кен ісі
- Транспорт
- Туризм
- Физика
- Философия
- Халықаралық қатынастар
- Химия
- Экология, Қоршаған ортаны қорғау
- Экономика
- Экономикалық география
- Электротехника
- Қазақстан тарихы
- Қаржы
- Құрылыс
- Құқық, Криминалистика
- Әдебиет
- Өнер, музыка
- Өнеркәсіп, Өндіріс
Қазақ тілінде жазылған рефераттар, курстық жұмыстар, дипломдық жұмыстар бойынша біздің қор #1 болып табылады.

Ақпарат
Қосымша
Email: info@stud.kz