Жиіліктік түрлендіргішпен басқарылатын ленталы конвейердің көпқозғалтқышты асинхронды электржетегін жобалау, басқару жүйесін MATLAB-та синтездеу және қауіпсіздік-экономикалық талдау

Аннотация
Дипломный
проект посвящен разработке
многодвигательного
электропривода конвейера. В проекте дается краткое описание ленточной
конвейерной установки и описание многодвигательного электропривода
конвейера.
Рассмотрена структурная схема и математическое описание
двухдвигательного асинхронного электропривода конвейера с системой ПЧ-
АД, а также устойчивость движения этой системы.
Программа синтеза параметров системы управления двухдвигательного
асинхронного электропривода конвейера с системой ПЧ-АД представлена в
среде MATLAB.
В разделе безопасность жизнедеятельности произведен анализвредных и
опасных факторов в горнодобывающих производствах, меры по защите труда,
меры по технологической защите, расчеты по заземлению.
В экономической части дипломной работы
рассматривалась
экономическая эффективность новой системы электропривода на базе
преобразователя частоты.
Аңдатпа
Дипломдық жоба конвейердің көпқозғалтқышты электржетегін құруға
арналған. Жобада ленталы конвейер қондырғысының қысқаша сипаттамасы
мен конвейердің көпқозғалтқышты электржетегінің сипаттамасы берілген.
ЖТ-АҚ жүйесіндегі конвейердің екіқозғалтқышты асинхронды
электржетегінің құрылымдық сұлбасы мен математикалық сипаттамасы және
осы жүйенің қозғалыс орнықтылығы қарастырылған.
ЖТ-АҚ жүйесіндегі конвейердің екіқозғалтқышты асинхронды
электржетегінің басқару жүйесінің параметрлер синтезінің бағдарламасы
MATLAB бағдарламалық жүйесінде келтірілген.
Жобаның өмір тіршілік қауіпсіздігі бөлімінде конвейер цехындағы
қауіпті және зиянды факторларды талдау, еңбек қорғау шаралары, техникалық
қорғау шаралары және қорғаныстық жерге қосу мен өндіріс орнын
жарықтандыруға есептеулер жүргізілді.
Дипломдық жобаның экономикалық бөлімінде жиілік түрлендіргіш
базасында жаңа электржетек жүйесінің экономикалық тиімділігі
қарастырылған.
Мазмұны
Кіріспе
1 Технологиялық бөлім
1. 1 Конвейер қондырғысының сипаттамасы
1. 2 Конвейердің конструкциалды сипаттамасы
1. 3 Ленталы конвейердің энергияны үнемдейтін көп қозғалтқышты
электр жетегі
1. 4 Электр жетек жүйесін таңдау
1. 5 Электрқозғалтқышты таңдау
1. 6 Басқару жүйесінің параметрлерінің есептеуі
7
8
8
9
10
11
13
16
2. Жиілік
түрлендіргіші бар көпқозғалтқышты асинхронды
электржетектің басқару жүйесін құру
2. 1 ЖТ-АҚ жүйесіндегі бірқозғалтқышты асинхронды электржетектің
құрылымдық сұлбасы
2. 2. ЖТ-АҚ жүйесінің математикалық сипаттамасы
20
20
21
2. 3 Екіқозғалтқышты
электржетектің динамикасының
математикалық сипаттамасы мен құрылымдық сұлбасы
2. 4. ЖТ-АҚ тұйықталған жүйесінің орнықтылығы
2. 5 Екіқозғалтқышты асинхронды электржетектің басқару
жүйесінің параметрлінің синтезі
3 Өмір тіршілік қауіпсіздігі
3. 1 Конвейер цехындағы қауіпті және зиянды факторлар
3. 2 Техникалық қорғау шаралары
3. 3 Қорғаныстық жерге қосуды есептеу
3. 4 Өндіріс орнын жарықтандыру
4 Экономикалық бөлім
4. 1 Екі қозғалтқышты ленталы конвейер электр жетегін жетілдіруге
кететін капиталды шығындар
4. 2 Электроэнергия шығындары
4. 3 Экономикалық тиімділік
Қорытынды
Пайдаланылған әдебиеттер тізімі
24
26
35
44
44
49
52
55
57
57
61
62
64
65
Кіріспе
Қазіргі
автоматтандырылған электржетек жүйесіне, әсіресе,
технологиялық қондырғылармен күрделі автоматты басқару жүйесінде жұмыс
істейтін электржетегінің қозғалысты басқарудың сапасына тым қатаң талаптар
қойылады. Дәл
технологиялық қондырғыларда, манипуляторларда
электржетегіне берілген тезәрекеттілігін, орнын анықтау және дәлдігін, үлкен
тұрақтылық пен жылдамдықты реттеудің кең диапазонын, жылдамдықтың
шектелуін және т. б. қамтамасыз етеді.
Қазіргі кезде көптеген өндіріс орындарында ең көп қолданылатын
қозғалтқыштардың бірі асинхронды қозғалтқыш (АҚ) болып табылады.
Себебі,
айналу жылдамдықтары және қуаттары бірдей асинхронды
қозғалтқыш пен тұрақты токты қозғалтқышты салыстыратын болсақ, мұнда
АҚ-ның салмағы 1, 5-2 есе жеңіл, бағасы арзан, оны жасауға түсті металл аз
кетеді, оны пайдалану қарапайым және сенімді. Алдынғы кездерде АҚ
көбінесе реттелмейтін электржетектерде қолданыс тапқан. Бірақ жартылай
өткізгішті құрылғылардың дамуына, соның ішінде күштік тиристордың және
транзисторлардың пайда болуына байланысты көптеген күштік түрлендіргіш
құрылғылары пайда бола бастады. АҚ-ның жылдамдығын реттеудің
рационалды тәсілі болып коректендіруші кернеудің жиілігін өзгерту болып
табылады. Қазір көбінесе АҚ-ның айналу жылдамдығын реттеу үшін жиілік
түрлендіргіштері қолданылады. Жиілік түрлендіргіші (инвертор) - жиіліктік
реттелетін электржетектің айрылмас бөлігі және
айналу жылдамдығын реттеуге арналған. Жиілік түрлендіргіштер басқарудың
аса оңайға түспейтін алгоритмін жүзеге асыруға, ПӘК-тің реттеуге,
қозғалтқышты қорғауға, жүктемеге байланысты жұмыс режимін оптималдауға
және де көптеген функцияларды орындауға мүмкіндік береді.
Бұл дипломдық жоба шеңбрінде ленталы конвейердің көпқозғалтқышты
электржетегі құрылған.
Жобаны орындау барысында келесі негізгі мәселелер жүзеге асырылды:
- конвейер қондырғысының қысқаша сипаттамасы мен конструкциалды
сипаттамасын қарастырамыз;
-
ленталы конвейердің энергияны үнемдейтін көпқозғалтқышты
электржетегі;
- электржетек жүйесін таңдау;
- электрқозғалтқыштың түрін және оның параметрлерін таңдау;
- берілген басқару жүйесінің сапа көрсеткіштерін қамтамасыз ететін
параметрлеріне есептеу жүргізілді;
- конвейердің екіқозғалтқышты асинхронды электржетегінің басқару
жүйесі құрылды;
- өмір тіршілік қауіпсіздігі мен экономика бөлімі қарастырылды.
1 Технологиялық бөлім
1. 1 Конвейер қондырғысының сипаттамасы
Конвейер, транспортер-
үздіксіз жұмыс істейтін көліктік
қондырғынемесемашина.
Сусымалы, кесек немесе дара жүктерді
тасымалдауға арналған. Конвейер (ағылшынша сonveyer; conv ey - тасымалдау
дегенді білдіреді) су көтеретін
шынжырлы сорғылар, шөмішті және винтті
су көтергіштер түрінде пайдаланылған. 16 - ғасырдан бастап сусымалы
(мысалы, ұн өндірісінде) және дара заттарды жақын араға жеткізетін
конвейерлер қолданылатын болды. Техниканың дамуына байланысты 19 -
ғасырдан бастап әр түрлі конвейерлер шығарыла бастады және бұларды жасау
үшін машина жасаудың бөлек бір саласы пайда
болды. тетіктері бойынша конвейерлер бірнеше
түрге топтастырылады. Қозғау тетігі бойынша конвейер таспалы, шынжырлы,
канатты (арқанды) болып бөлінеді.
Қозғаутетігі
, инерциялықконвейер, винттікконвейер
жатады. Қозғау тетігі бар конвейер жүк тасымалдау тәсіліне сәйкес
таспалы, пластинкалы, күреуішті, шөмішті, т. б. болып ажыратылады. Жұмыс
ерекшелігіне орай конвейер төсемелі және аспалы болып ажыратылады.
Төсемелі конвейер орнықты, жылжымалы (өздігінен орын ауыстыратын және
сүйретілмелі) болуы мүмкін. Конвейер тасымалданатын жүк түріне
(сусымалы не кесек) сәйкес те ажыратылады. Элеватор, аспалы шөмішті,
бесікті, қорапты, эскалатор, адымдағышконвейер, т. б., сондай - ақ біріктірілген
(мысалы, роликті - таспалы конвейер) конвейерлер өз алдына ерекше топ
құрайды. Таспалы конвейер сусымалы, кесек және дара жүктерді
тасымалдауға арналған (қ. сурет) . Бұл конвейердің жұмыс өнімділігі бірнеше
тонна/сағаттан мыңдаған тонна/сағатқа дейін жетеді. Таспаның ені 300 - 2000
мм, қозғалу жылдамдығы 1, 5
-
4, 0 м/с
болады. көлбеу (35 - қа дейін)
жазықтықта ауыр (500 кг және одан да ауыр) дара, ірі кесек жүкте р, сондай -ақ
қыздырылған заттар тасымалданады. Қозғалу жылдамдығы 0, 3 - 10 м/с,
жұмыс өнімділігі 2000 тонна/сағатқа дейін жетеді. Күрекшелі конвейер
науадағы немесе құбырдағы жүктерді қалақшалармен
жылжытады. құбырдың көлденең
қималарының пішіндері ұқсас болады. Бұл конвейер түрінің құрылысы
қарапайым және оның науасының кез келген тұсынан жүкті түсіре беруге
мүмкіндік бар. Күрекшелі конвейердің науасы үйкелістен тез тозады,
сондықтан бұл конвейер абразивті және ұнтақталған материалдарды
тасымалдауға пайдаланылмайды. Мұның жұмыстық бөлігінің жылдамдығы
0, 16 - 1, 0 м/с, жұмыс өнімділігі 50 - 350 тонна/сағат. Бұл конвейермен жүкті
100 м -ге дейінгі қашықтықта тасуға болады. Еңбек өнімділігінің жоғарылығы,
құрылысының қарапайымдылығы, жұмыс қауіпсіздігі, т. б. сипаттамаларының
тиімді болуына байланысты конвейерлер mэкономиканыңбарлық салаларында
қолданыс тапты.
1. 2 Конвейердің конструкциалды сипаттамасы
Металлургиялық фабрикаларда барлық типті конвейерлердің ішінде кең
қолданыс тапқан ленталы конвейерлер. Олардың үлесі 95 - 97 % құрайды.
Конвейерлі транспорттың кең қолданылу себебі және
басқа түрлі
транспорттан артықшылығы - көп жүкті үлкен қашықтықта тасымалдай алуы.
Ондай артықшылықтарына жатады: конструкцияның оңайлығы, жұмыста
сенімділігі, жоғары өнімділік және аз эксплуатациялды шығыны. Содан
басқа, конвейерлі транспорттың қолдануы өнімділікті жоғарлатуға, 10 - 15%
фабрика ауданын қысқартуға, цехтардың арасындағы қашықтықты
қысқартуға,
транспортты коммуникациларды оңайлатуға мүмкіндік
береді. Конвейерлі транспортты кіргізу транспорт қауіпсіздік деңгейін
жоғарлатуға мүмкіндік береді.
Жетек - конвейерді және жүкті тартатын машиналарды қозғалысқа
әкеледі. Ленталы конвейердің қажетті тартылыс күші лента және барабан
бетінде пайда болатын үйкеліс күші арқылы жүреді.
5
α
Тнаб
4
3
2
Тсб
1
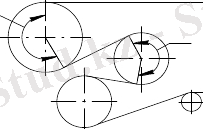
1. 1cурет -Ленталы конвейердегі жетектің сұлбасы
Жетек қозғалтқыштан (1) редуктордан (3) барабаннан (5) сонымен α р





4
3
Тсб
2
муфтадан (2) және (4), қозғалтқыш пен редукторды, редуктор мен барабанды
білік қосады.
Ленталы конвейер жетектің келесі түрлерінен тұрады: бір барабанды
басты немесе екі барабанды басты.
α
а)
α 1
б)
α 2
а - бірбарабанды; б - екі барабанды.
1. 2сурет - Ленталы конвейердің жетек түрлері
Жетек конвейердің сол жағынан да, оң жағынан да болуы мүмкін. Екі
барабанды жетекті қолданғанда жетек барабандарының арасындағы
қашықтықты ескеру қажет, лентаның өту уақыты 0, 5 с -тан аз болмауы керек.
Ауыр жүктелген конвейер немесе алыс қашықтықты өткенде жергілікті және
сызықты қарсылықты өту үшін лента қатты тартылуы қажет. Осындай
жағдайларда конвейердің бір барабанды жетегі тиімді емес болады.
Сондыктан көпбарабанды жетекті қолдану перспективты болып табылады.
Қисық ленталы конвейерлердің жетегінде тежегіш қолданады. Ол
жетекті қозғалтқышты сөндіру кезінде жүктің өз еркімен ауырлық күшінен,
лентаның кері қозғалысынан сақтайды.
1. 3 Ленталы конвейердің энергияны үнемдейтін көпқозғалтқышты
электр жетегі
Қазақстан Республикасында қабылданған «Энергияны үнемдеу туралы»
Заң әрбір электр қондырғыға қатысты электр энергияны үнемдеу бойынша
шараларды құруды қарастырады. Сондықтан энергияны үнемдеу бойынша
барлық ғылыми-техникалық шаралар өндіріске энергияның жоғары
эффективтілігімен ерекшеленетін жаңа тәсілдер менқұрылғыларды әзірлеуге
және енгізуге бағытталған. Бұл, біріншіден, электр
жетегі бар
электрмеханикалық құрылғыларға қатысты, себебі өндірілетінбарлық электр
энергиясының 60%-дан астамы жұмыс механизмдер менмашиналардың, көлік
құралдарының электр жетектерінде қолданылады. Сондықтан электр
энергиясын үнемдеу бойынша шаралардың электр жетектері және оның
ішінде көпқозғалтқышты электр жетектері үшін маңызы өте зор.


Ленталы конвейерлер шахта және кен орындарындағы кен
тасымалдайтыннегізгі көлік ретінде кеңінен пайдаланылады. Магистралды
штректерделенталы конвейерлерді пайдалану кеңінен таралып келеді, бұл
шахталардыоқпан албарына дейін және жер бетіне дейін конвейерлеу
проблемасынтолығымен шешеді. Онда қолданылатын айнымалы токты
көпқозғалтқыштыэлектр жетектері (КЭЖ) электр энергиясын жаппай және
кеңіненпайдаланушылар болып табылады.
Қазіргі
кезде ленталы конвейерлердің реттелмейтін электр
жетектерінреттелетін жүйелеріне ауыстырудың орнықты үрдісі кең орын
алды. Күштікэлектрониканың, басқарудың және бақылаудың
қазіргі заманғы деңгейі реттелетін
асинхронды электржетектерін (АЭЖ) құруға жаңадан көзқарас
қалыптастыруға мүмкіндік берді. Нарықта сенімді, сапалы және
салыстырмалы түрде қымбат емес жартылайөткізгіштік энергия
түрлендіргіштерінің автоматтандыру құрылғыларыменбірге пайда болуы, осы
техникалық жетістіктерді энергияны және ресурстардыүнемдеу мәселелерін
шешуге кеңінен пайдалануға мүмкіндік беруде. Айнымалы токты
қозғалтқыштың жылдамдығын реттеу тәсілдерінің еңтиімдісі асинхронды
электр жетектерінің сапалы механикалық сипаттамаларыналуға мүмкіндік
беретін жиіліктік реттеу болып табылады.
Сонымен қатар, ленталы конвейердің
электр жетегіне қатысты «жиіліктік
түрлендіргіш-асинхронды қозғалтқыш» жүйесі бойынша жылдамдығын
реттеу асинхронды электр жетегінің (КАЭЖ)
құрылмаған, берілген энергия түрлендіргішімен
ленталыконвейерге қатысты көпқозғалтқышты асинхронды электр
көрсеткіштерінің сарапталуы орындалмаған. Сол
себептенленталы конвейердің энергияны үнемдейтін көпқозғалтқышты
асинхрондыэлектр жетегін құру өзекті мәселе болып саналады.
1. 4 Электр жетек жүйесін таңдау.
Ленталы конвейерлердің жетегінің кең таралған негізгі түрі электрлік
жетек болып табылады. Ленталы конвейер жетегінің негізгі тағайындалуы
конвейерлік таспаның барлық жұмыс режимдерінде конвейердің қалыпты
қозғалысын және қажетті тартпалы күштін берілуін қамтамасыз етеді.
Осыған байланысты конвейер жетегі келесі негізгі талаптарға жауап
беруі керек:
- байсалды жіберуді және баяулатуды таспаның қозғалысы кезіндегі
үлкен іске қосу моментін қамтамасыз етеді;
- бірнеше жетектік барабаны бар конвейердің жетегі барлық жұмыс
режимдерінде осы барабандардың жылдамдығын қамтамсыз ету керек;
- таспаның қозғалыс жылдамдығы реттелетін конвейердің жетегі бір
жылдамдықтан басқа жылдамдыққа бірқалыпты өтуін қамтамасыз етуі керек;
- жоғары сенімділігін қамтамасыз етуі.
Дипломдық жобада бастапқы мәліметтерге сәйкес жұмысшы қозғалыс
жылдамдығы 0, 2…1 м/c шегінде өзгеретін электржетегі реттелетін ленталы
конвейердің электржетегін жобалау керек.
Жылдамдықты реттеуді қамтамасыз ететін ең көп қолданылатын және
игерілген жетек сұлбалары келесідей:
- жиілік түрлендіргіші бар айнымалы ток және қысқа тұйықталған
асинхронды қозғалтқышты электржетегі;
- асинхронды - вентильдік каскады бар айнымалы ток және фаза
роторымен асинхронды электрқозғалтқышты электржетегі;
- тиристорлы түзеткіші бар тұрақты ток электр жетегі (өте сирек) .
Дипломдық жобаға бастапқы мәліметтермен сәйкес жобалауға қажет
ленталы конвейердің жетегі үшін бұл сұлбаларды қолданудың мүмкіндігін
талдауды орындаймыз.
Тапсырма бойынша жетек МЕСТ 15150-69 бойынша У2 шарттарында
пайдаланылады. Демек, тұрақты тоок электржетегін қолдану мүмкін емес,
себебі ылғалдың әсерінен қозғалтқыш коллекторы зақымдалады және
қозғалтқыш қатардан шығады.
Ленталы конвейерді жобалауда қолдануға болатын екі нұсқа қалады.
Электржетек жүйесін нақты таңдау үшін, конвейер қозғалтқышының қуаттар
қосындысын есептейміз.
Жетекті станция қозғалтқышының (екі) қуаттар қосындысы:
P Σ = k З
Fтяг ⋅υ
η р
кВт;
(1. 1)
P Σ = 1, 3
6000 ⋅1
0, 95
= 8, 21кВт,
мұндағы η р - жетекті станция редукторының ПӘК-і;
k З ≈ 1, 1 . . . 1, 3 - қарсыласу күшін ескеретін қор коэффициенті.
Конвейер қозғалтқышының қосынды қуатының есептеуіне қарағанда,
оның қуаты көп емес. Іс жузінде қуаты 200 кВт- қа дейінгі конвейерлер үшін
қысқы тұйықталған роторы бар асинхронды қозғалтқыш, ал одан да қуатты
конвейерлер үшін фазалы роторлы асинхронды қозғалтқышты
пайдаланылады.
Ленталы конвейерлер үшін жиілікті түрлендіргіші бар айнымалы токты
реттелетін электржетекті екі маңызды принципиалды сұлбаларды
пайдаланылады: түрлендіргішке қосылған қысқа тұйықталған асинхронды
қозғалтқыштың тікелей желіге қосылған сұлбасы және инверторлы типті
жиілік түрлендіргіші бар сұлба.
(ИЖТ) инверторлар негізінде жиілік түрлендіргіштердің қолдануы ең
жақсы реттеудің көрсеткіштерін береді. Мұндай түрлендіргіштер номиналды
мәніне байланысты астыға да, үстіне де жылдамдықты реттеудің кең
диапазонын қамтамасыз етеді.
Сонымен, жиіліктік реттеудің таңдау заңы сәйкесінше, оның жіберілген
момент тұрақтылығы, жалғасқан жүктеме режиміндегі жіберілген қуат
тұрақтылығы да жүзеге асады.
ИЖТ
түрлі модификациялары берілген электржетек жүйесін
электрэнергия көзіндегі ток түріне қарамастан жүзеге асырады. ИЖТ-АҚ
жүйесінің кемшілігі ТЖТ-АҚ жүйесіне қарағанда функционалды күрделілігі
және өте жоғары бағалануы болады.
Айтарлықтай, өте қарапайым және арзан болып тікелей жиілік
түрлендіргіштері болып табылады, бірақ олардың қолданылуы жиілікті
реттеудің шағын аймақпен және төмен энергетикалық сипаттамамен
шектеледі.
ТЖТ-АҚ жүйесін қолдану барысында қозғалтқыштың қуатын екі есе
ұлғайту керек, өйткені ең жоғары жиілік 50 Гц емес, 25 Гц болады.
Бұл жағдай осы жүйенің құнын үлкейтеді және бұл жүйе ИЖТ-АҚ
жүйесінің құнымен іс жүзінде теңеседі.
Жоғарыда айтылғандардың бәрін жалпылайтын болсақ, жобаланатын
конвейер үшін жөндеу шарттарына және берілген көрсеткіштерге жауап
беретін ең тиімді инверторлы типті жиілікті түрлендіргішімен (ИЖТ)
айнымалы токты электржетек жүйесін таңдаймыз.
1. 5 Электрқозғалтқышты таңдау
Жетекті барабан диаметрін 0, 3 м тең етіп таңдаймыз. Беріліс саны
i = 22, 4 тең етіп редукторды таңдаймыз. [1]
Таспа жылдамдығы υ = 1 м/с кезінде конвейер қозғалтқышының (екі)
жылдамдығы
ω =
2 ⋅υ ⋅ i
D
рад/с;
(1. 2)
ω =
2 ⋅1⋅ 22, 4
0, 3
= 149, 3 рад/с.
мұнда, D -жетекті элементтің диаметрі.
Конвейер қозғалтқыштарының қосынды моменті:
М Σ = k ⋅
Fтяг ⋅ D
2 ⋅ i р ⋅η р
Н∙м;
(1. 3)
М 1, 3
6000 0, 3
2 22, 4 0, 95
55 Н∙м.
[2] Анықтама бойынша 4А112М4РНУ2 типті екі бірдей қозғалтқышты
мынадай параметрлерімен таңдаймыз:
- номиналды қуаты-Р = 5, 5 кВт;
- ПӘК-і- η = 85, 5%;
- номиналды сырғу-Sном=5%;
- синхронды айналу жиілігі - nсинхр=1500айн/мин;
- cos ϕ = 0, 86 ;
- ротордың инерция моменті-Jр=0, 017 кг∙м2.
Орынбасу сұлбасының параметрлері(салыстырмалы бірлікте) :
X μ = 2, 8 ; R 1 ′ = 0, 064 ; X 1 ′ = 0, 078 ; R 2 ′′ = 0, 041 ; X 2 ′′ = 0, 13 .
Орам параметрлерін салыстырмалы бірліктен абсолюттікке қайта
есептейміз[1] .
Z H =
Z H
U H . Ф
I H . Ф
220
11, 33
;
19, 417 Ом;
(1. 4)
I H . Ф =
P 1
3 ⋅U H . Ф ⋅ cos ϕ
;
(1. 5)
I H . Ф =
6432, 75
3 ⋅ 220 ⋅ 0, 86
= 11, 33 А;
P 1 =
PH
η
Вт;
(1. 6)
P 1 =
5500
0, 855
= 6432, 75 Вт;
R 1′ = 0, 064 ⋅ Z H = 0, 064 ⋅19, 417 = 1, 242 Ом;
X1 ′ = 0, 078 ⋅ Z H = 0, 078 ⋅ 19, 417 = 1, 514 Ом;
R 2′ = 0, 041⋅ Z H = 0, 041⋅19, 417 = 0, 796 Ом;
X 2 ′ = 0, 13 ⋅ Z H = 0, 13 ⋅ 19, 417 = 2, 524 Ом;
X μ = 2, 8 ⋅ Z H = 2, 8 ⋅19, 417 = 54, 367 Ом.
АҚ номиналды жылдамдығы мен номиналды айналу моментін
анықтаймыз [1] :
M ном =
Рно м
ω ном
;
(1. 7)
ω ном = ω1 ⋅ (1 − sном ) ;
(1. 8)
ω1 =
π ⋅ n 1
30
=
π ⋅1500
30
= 157 рад/с;
ω ном = 157 ⋅ (1− 0, 05) = 149, 2 рад/с,
онда
M ном =
5500
149, 2
= 36, 86 Н⋅м.
Инерцияның қосынды моменті мынаған тең:
J ∑ = J пер. устр. + J р + J груза ,
мұндағы J пер . устр . = 0, 05 ⋅ J р ;
2
ω д
:
(1. 9)
m =
F тяг ⋅η р
μ ⋅ g
кг;
(1. 10)
m =
6000 ⋅ 0, 95
0, 014 ⋅ 9, 81
= 41503 кг.
Онда
J груза
υ
ω д
2
(1. 11)
J груза
149, 2
2
2
2
2
(1. 12)
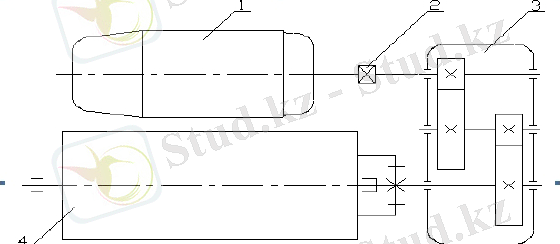
Конвейердің жетекті станциясының
кинематикалық сұлбасы 1. 3 -
суретте келтірілген.
1 - 4А112М4РНУ2 қозғалтқышы; 2 - муфта; 3 - редуктор; 4 - жетекті
барабан
1. 1 - сурет. Конвейердің жетекті станциясының кинематикалық сұлбасы
1. 6Басқару жүйесінің параметрлерінің есептеуі
Басқару жүйесі жылдамдық бойынша тұйықталған бірконтурлы жүйені
ұсынады. Ол жиілік және жүктеменің барлық диапазонында қажетті шамадан
тыс зейінді қамтамасыз ететін статикалық механикалық сипаттамаларын
белгілі нысанға келтіреді.
Механикалық сипаттаманың сызықтық аймағында қозғалтқыш жұмыс
істейтініне рұқсат етеміз, онда [1] :
(1 + TЭ ) M = β (ω 0 − ω ) ;
(1. 13)
Осының есебімен, жүйенің құрылымдық сұлбасы келесі түрде болады:
U зс
-
W рс( p)
U у
K п
ω o
-
β
T э p+1
M
1
Jp
ω
-Mc
Koc
1. 4сурет - Жүйенің құрылымдық сұлбасы
Механикалық сипаттаманың
сызықтық
бөлік
жұмысы
кезіндегі
қатандығын есептейміз:
β =
2 M K
ω0 ⋅ S K
Н ⋅ м ⋅ с ;
(1. 14)
β =
2 ⋅ 84, 6
157 ⋅ 0, 188
= 5, 732 Н ⋅ м ⋅ с.
Уақыт тұрақтыларын анықтаймыз:
T Э =
1
S K ⋅ ω 0ЭЛ
с
(1. 15)
T Э =
1
0, 188 ⋅ ( 2 ⋅ π ⋅ 50 )
= 0, 0169 с;
TM =
J Σ
β
с;
(1. 16)
TM =
1, 877
5, 732
= 0, 327 с;
m =
TM
TЭ
;
(1. 17)
m =
0, 327
0, 0169
= 19, 4 >> 4 .
m >>4 болғандықтан, қарастырылып отырған электржетегі екі тізбектей
жалғанған апериодикалық буын түрінде ұсынылуы мүмкін.
Онда, ішкі кері байланыс есебімен қозғалтқыштың беріліс функциясы
екінші реттің буыны ретінде ұсынылады:
W Д ( p ) =
2
1
(1. 18)
Сипаттамалық теңдеудің түбірлерін анықтаймыз:
0, 00772 p 2 + 0, 457 p + 1 = 0;
p1 = − 2, 281;
p2 = − 56, 916.
Сонымен:
W Д ( p ) =
1 0, 00769
( p + 2, 281 ) ⋅ ( p + 56, 916 ) ( 0, 4384 p + 1 ) ⋅ ( 0, 01756 p + 1 )
.
Осыған қарасты, обьекттің реттелуінің беріліс функциясы:
WOP ( p ) =
K П ⋅ K OC ⋅ 0, 00769
( 0, 4384 p + 1 ) ⋅ ( 0, 01756 p + 1 )
K П
0
U y
,
1
ℜ 〉
(1. 19)
K П =
157
8
= 19, 63
1
В ⋅ с
;
K OC =
U y
ω мах
В ⋅ с ;
(1. 20)
K OC =
8
149, 3
= 0, 0535 В ⋅ с.
Техникалық оптимумында құрылған ықылас беріліс функцияның
жүйесі:
WЖ ( p ) =
1
.
(1. 21)
Tμ=0, 01756 деп алып, үлкен уақыт тұрақтысын өтейміз .
Жылдамдық реттегішінің беріліс функциясы:
WPC ( p ) =
W Ж ( p )
WOP ( p )
=
(0, 4384 p + 1) ⋅ (0, 01756 p + 1)
2 T μ p ⋅ ( T μ p + 1) ⋅ K П ⋅ K OC ⋅ 0, 00769
=
=
0, 4384 p + 1
2 ⋅ 0, 01756 p ⋅19, 63 ⋅ 0, 0535 ⋅ 0, 00769
=
0, 4384 p + 1
−6
= 1545, 6 +
1
283, 6 ⋅10 −6 p
.
Пропорционалды - интегралды жылдамдықтың реттегішін (ПИ - ЖР)
келесі параметрлерімен алдық:
K PC = 1545, 6;
T И = 283, 6 мкc.
2. Жиілік түрлендіргіші бар
электржетектің басқару жүйесін құру
көпқозғалтқышты
асинхронды
2. 1
ЖТ-АҚ жүйесіндегі
бірқозғалтқышты
асинхронды
электржетектің құрылымдық сұлбасы
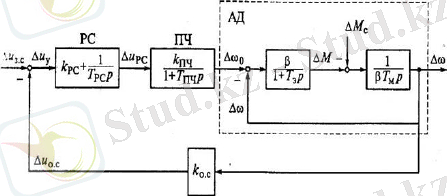
ЖТ-АҚ жүйенің құрылымдық сұлбасының математикалық
сипаттамасынберіліс функциясы негізінде қарастырамыз. ЖТ-АҚ жүйенің
құрылымдық сұлбасы 2. 1 суретте келтірілген [1] .
2. 1 сурет - ЖТ - АҚ жылдамдық бойынша кері байланыс тұйық жүйесінің
құрылымдық сұлбасы
2. 1 суретте: ЖР -жылдамдық реттеуші, ЖТ -жиілік түрлендіргіш, АҚ-
асинхронды қозғалтқыш. 2. 1 суретте ЖТ - АҚ жылдамдық бойынша кері
байланыс тұйық жүйесінің сызықтық құрылымдық сұлбасы берілгеніне назар
аударған жөн. Бұл ЖТ - АҚ жылдамдық бойынша кері байланыс тұйық жүйесінің
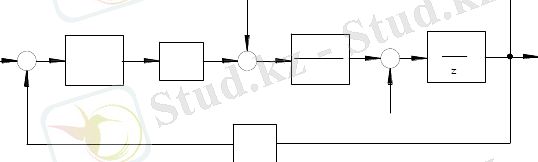
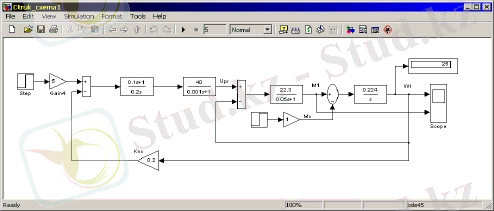
құрылымдық сұлбасы MATLAB программасы арқылы 2. 2. суретте көрсетілген.
2. 2 cурет - ЖТ - АҚ тұйық жүйесінің құрылымдық сұлбасы
ЖТ - АҚ тұйық жүйесінің тұрақты уақыты мен коэффиценттерінің
сандық мәндері таңдалған [1] . Жылдамдықтың ауыспалы процесінің
қисықтары және асихронды қозғалтқыштың ЖТ - АҚ тұйық жүйесінің
моментіне жүйе кірісіндегі басқарма бірегей көтерілгендегі U(З. С) =1(t) ықпал
етуі 2. 3 суретте көрсетілген.
2. 3 cурет - Асинхронды қозғалтқыштың тұйықталған ЖТ-АҚ жүйесіндегі
жылдамдық пен моменттің өтпелі процесстер қисықтары
Асинхронды қозғалтқыштың жылдамдығының өтпелі процесстер
қисығы болып өтпелі процесстің жоғарғы қисығы есептеледі, ал төменгі
қисық қозғалтқыштың электрмагниттік моментінің өтпелі процессі болып
саналады. Суретте көрсетілгендей жылдамдықты реттеу 30
құрайды.
Құрылымды сұлбадағы (2. 3 сурет) параметрлері 4А112М4РНУ2
типті
... жалғасыСіз бұл жұмысты біздің қосымшамыз арқылы толығымен тегін көре аласыз.
- Іс жүргізу
- Автоматтандыру, Техника
- Алғашқы әскери дайындық
- Астрономия
- Ауыл шаруашылығы
- Банк ісі
- Бизнесті бағалау
- Биология
- Бухгалтерлік іс
- Валеология
- Ветеринария
- География
- Геология, Геофизика, Геодезия
- Дін
- Ет, сүт, шарап өнімдері
- Жалпы тарих
- Жер кадастрі, Жылжымайтын мүлік
- Журналистика
- Информатика
- Кеден ісі
- Маркетинг
- Математика, Геометрия
- Медицина
- Мемлекеттік басқару
- Менеджмент
- Мұнай, Газ
- Мұрағат ісі
- Мәдениеттану
- ОБЖ (Основы безопасности жизнедеятельности)
- Педагогика
- Полиграфия
- Психология
- Салық
- Саясаттану
- Сақтандыру
- Сертификаттау, стандарттау
- Социология, Демография
- Спорт
- Статистика
- Тілтану, Филология
- Тарихи тұлғалар
- Тау-кен ісі
- Транспорт
- Туризм
- Физика
- Философия
- Халықаралық қатынастар
- Химия
- Экология, Қоршаған ортаны қорғау
- Экономика
- Экономикалық география
- Электротехника
- Қазақстан тарихы
- Қаржы
- Құрылыс
- Құқық, Криминалистика
- Әдебиет
- Өнер, музыка
- Өнеркәсіп, Өндіріс
Қазақ тілінде жазылған рефераттар, курстық жұмыстар, дипломдық жұмыстар бойынша біздің қор #1 болып табылады.

Ақпарат
Қосымша
Email: info@stud.kz