Arduino негізіндегі манипулятор иінінің буын электржетегін жобалау және техникалық-экономикалық негіздеме

Аңдатпа
Дипломдық жобада манипулятордың иіннің буынның
электржетекшісінің моделі жобалынды. Жобаның барысында есептелмелік
жұмыстар жүргізіліп, басқару жүйесі таңдалынды. Arduino негізінде жасалған
бұл жоба қазіргі таңда үлкен сұраныс үстінде. Манипуляторлы электржетегін
жобалау кезінде көптеген программалар қолданылды (Sprint-Layout, Sketchup,
Solidworks, Electronic Workbench, Bluetooth Electronics, CorelDraw) . Бұл
жобаның экономикалық тиімділігі мен өміртіршілік қауіпсіздігі
қарастырылды.
Аннотация
В данном дипломном проекте спроектирован электропривод плечевого
сустава манипулятора. В процессе проекта проводились вычислительные
работы и выбрана система управления. Этот проект который основан на
основе Ардуино и пользуется большим спросом среди людей. В
моделировании проекта были использованны множество программ (Sprint-
Layout, Sketchup, Solidworks, Electronic Workbench, Bluetooth Electronics,
CorelDraw) . В этом проекте были предусмотренны экономическая
эффективность и безонастность жизнидеятельности.
Annotation
In this graduation project the electric drive of the shoulder of the manipulator
was designed. During the project computational works were done and control
system was selected. This project which is based on Arduino is now in great
demand. Many programs such as Sprint-Layout, Sketchup, Solidworks, Electronic
Workbench, Bluetooth Electronics, Corel Draw were used to design the electric
shoulder of the manipulator. There were provided the economic efficiency and life
safety of the project.
10
Манипулятордың иіннің буынның электржетекшісінің моделі
Мазмұны
Кіріспе . . . 12
1 Технологиялық бөлім . . . 13
1. 1 Дипломдық жобаға тапсырмалар қою . . . 13
1. 2 Жетек. Жетектің түрлері . . . 13
1. 3 Электрлік жетек . . . 15
1. 4 Манипулятор жайлы қысқа түсініктеме . . . 25
2 Конструкторлық бөлім . . . 26
2. 1 Сервожетек . . . 26
2. 2 Ішкі интерфэйс . . . 28
2. 3 Тісшелер материалдары . . . 29
2. 4 Қоректену блогы . . . 31
2. 5 Крон батареясы . . . 31
2. 6 Кернеу стабилизаторы . . . 32
2. 7 Bluetooth module HC 05 . . . 32
2. 8 Потенциометр . . . 33
2. 9 Техникалық есеп . . . 35
3 Бағдарламалық бөлім . . . 40
3. 1 Arduino IDE программасының әзірлеу ортасы . . . 40
3. 2 Программалық жүктеме . . . 42
4 Өміртіршілік қауіпсіздігі . . . 43
4. 1 Жұмыс орнындағы зиянды және қауіпті факторларға талдау жасау . . . 43
4. 2 Шудан қорғану. Шудың деңгейіне акустикалық есеп жүргізу . . . 44
4. 3 Электр қауіпсіздігін қамтамасыз ету шаралары . . . 49
4. 4 Нөлдеу есебі . . . 51
5 Техника экономикалық негіздеу . . . 54
5. 1 Жoбaның мaқcaты жәнe міндeті . . . 54
5. 2 Өндірістік жоспар . . . 54
5. 3 Кететін шығындар . . . 56
5. 4 Экономикалық тиімділігі . . . 59
Қорытынды . . . 62
Қысқартулар тізімі . . . 63
Әдебиеттер тізімі . . . 64
А қoсымшасы . . . 65
А қoсымшасының жалғасы . . . 66
А қoсымшасының жалғасы . . . 67
11
Кіріспе
Қазіргі
таңда ешбір өндірісті өндірістік механизмсіз елестете
алмайсың. Көптеген заманауи жұмыс машиналарын
және өндірістік
механизмдерді, транспорттарды, ауыл шаруашылығында, тұрмыстық
шаруашылықта, технологиялық процестерді қазіргі басқаратын автоматтанған
электржетек түріне дейін ұзақ даму процесін басынан өткізді. Заманауи
элетржетектің қуат қолданылуына байланысты шектері - бір қозғалтқыштағы
он мыңдаған кВ-тан жарты ваттқа дейін. Заманауи автоматтандырылған
электржетегі - жұмыс машинасының бөлігін қозғалтуға және оның
технологиялық процесстерін басқаруға арналған күрделі электромеханикалық
жүйе. Ол 3 бөліктен тұрады. Электромеханикалық энергияны түрлендіретін
электрлік қозғалтқыш технологиялық процестерді басқаруға арналған басқару
жүйесі болып табылады.
Техниканың кез келген саласында автоматтанған электржетегінің
көмегінсіз қозғалған ешбір заманауи
өндірісті
айта алмаймыз.
Электржетегінде электр энергиясын механикалық энергияға электр
қозғалтқыш түрлендіреді. Электр қозғалтқыш түрлендіргіш және басқарушы
құрылғы арқылы механизмдердің өндірістік талаптарына сай электржетектің
статикалық және динамикалық сипаттамаларының қалыптасуына байланысты
басқарушысы
болып табылады. Өндірістік процестің күрделігі жұмыс
машинасының қозғалу сипаттамалары мен түрлеріне тәуелді.
Қозғалудың түріне байланысты бір бағытты айналмалы қозғалыс және
ревестивті айналмалы
болып қозғалыстарды қамтамассыз етеді.
Қозғалтқыштың сипаттамасы мен басқарушы жүйенің мүмкіндіктері
механизмнің мүмкіндіктерімен технологиялық операциялардың
орындалуының дәлділігін анықтайды. Электромеханикалық жүйенің қасиеті
жұмыс машинасының маңызды көрсеткіштеріне, технологиялық
процестерінің экономикалық эффективтілігі мен сапасын анықтауға маңызды
әсер етеді. Автоматтанған электржетектерінің дамуы машина
конструкциясының жетілуіне, технологиялық процестердің түбегейлі
өзгеруіне, халық шаруашылығының барлық салаларында үлкен прогреске
алып келеді. Сондықтан электржетек теориясы - электромеханикалық жүйе
жалпы қасиеттерін зерттейтін, қозғалыстың басқару заңдарын, берілген
көрсеткіштерге байланысты жүйелердің синтездеу қабілеті бар техникалық
ғылым.
Жетілген электржетегін құрастыру электромеханикалық
құрылғының типін таңдау және оның технологиялық процесіне байланысты
басқару жүйесі осы процесте жұмыс атқаратын бөлек механизмдеріне
байланысты критерилерді қанағаттыру кезінде құрастырылады. Оның
ерекшелігі халық шаруашылығының әртүрлі салаларына байланыстылығымен
түсіндіріледі.
12
1 Технологиялық бөлім
1. 1 Дипломдық жобаға тапсырмалар қою
Манипулятордың иіннің буынның электржетекшісінің моделі жобалау
үшін біз көптеген программаларды пайдандық. Толығырақ айтсақ есептемелік
жұмыстар жүргізу үшін, 3D моделін жобалау үшін, манипуляторға қажетті
бөліктерін құрастыру үшін және т. б жұмыстарды орындау үшін
пайдаланылды. Бұл жобаның өміртіршілік қауіпсіздік талаптарына сай,
экономикалық тұрғыдан тиімділігіне көз жеткіздік. Алайда жобалауды
бастамас бұрын алдымызға мақсат - тапсырмаларды қоюды жөн көрдік:
a) жобаға байланысты қарастырылатын манипулятордың жалпы моделін
программада жобалау;
б) манипулятордың бөліктерінде тұратын редуктордың моделін жобалау;
в) керекті құраушы бөлшектерін жинау;
г) аrduino mega микропроцессоры негізінде басқару жүйесін әзірлеу;
д) жобаның бағдарламасын құру;
ж) жобаланған манипуляторды толығымен құрастыру;
и) өміртіршілік қауіпсіздігімен экономикалық тиімділігін қарастыру.
Бұл жобаның актуалдылығы - қазіргі таңда өнеркәсіптік және
зертханалық жұмыстарда манипуляторларды қолдану өнімділікті,
қолданыстағы және жаңадан әзірленген жабдықтар тиімділігін арттыруға,
және де адамды физикалық ауыр және денсаулыққа зиян жұмыстардан
арылуға кеңінен мүмкіндік береді. Манипулятордың жұмысының өнімділігін
және қолданыстағы тиімділігін арттыру үшін онда қолданылатын
электржетегінің маңызы зор.
1. 2 Жетек. Жетектің түрлері
Жетек - бұл қозғалысқа келтіруге арналған әртүрлі механизмдер мен
машиналардың жиынтығы. Энергияның көзі ретінде қозғалтқышты (жылулық,
электрлік, пневматикалық, гидравликалық және т. б. ) немесе жиналған
механикалық энергияны энергияны алдын ала бере алатын құрылғыны
(пружиналық, инерциялық, гирелік механизм) айтады. Кейбір жағдайларда
жетек жұмысы мускулдық күш арқылы жұмыс атқарады. Оған мысал ретінде
арифмометр, тігін машинасы, велосипед айтып кетуге болады.
Әйткенмен, өзінің жұмысында жетек қол жұмысы арқылы немесе
автоматикалық болуы мүмкін. Қол жұмысы арқылы жұмыс жасайтын жетектің
автоматикалықтан ерекшелігі қол жұмысы арқылы жұмыс жасайтын
жетектердің басқарылуы міндетті түрде жетектің қасында орналасуы керек.
Өйткені, бөлшектердің арасындағы үлкен механикалық алмасу (шынжырлы)
жетекті үлкен қашықтыққа қозғалтуға мүмкіндік бермейді. Сондықтан қол
жұмысы арқылы жасайтын жетектер тікелей басқарылуды қажет ететін
жетектер деп аталады.
Автоматикалық жетекке электрикалық және пневматикалық жетекті
жатқызуға болады. Электрикалық және пневматикалық жетектерді басқару
13
жетектердің өзінен емес, басқару қалқанында орналасқан. Электрикалық
жетектің негізгі мақсаты электр энергиясын механикалыққа немесе керісінше
түрлендіру болып табылады. Бұл процесс басқарылатын және әртүрлі
машиналар, аппараттар, құрылғылар мен жабдықтардың жұмыстары үшін
керекті.
Қашықтықтан басқарылатын жетектер - дистанциондық деп аталады.
Электрикалық дистанциондық жетектер:электромагниттік және электро -
қозғатқыштық.
Жетектің ең маңызды жұмысы - қосу және ажырату. Онымен қоса
жетек ажыратқышты қолмен немесе қашықтықтан ғана емес оны реле
қорғанысы жұмыс жасаған кезде автоматты түрде өшіруі қажет. Сондықтан
жетек өшіруіне байланысты автоматты және автоматты емес болып бөлінеді.
Барлық автоматты жетектерде реле қорғанысының сигналын қабылдайтын
өшіруші электромагниті (өшіруші катушка), болады.
Жетек манипулятордың құрама бөлігінің бірі болып табылады. Оның
басты қызметі келетін энергияны манипуляторлық жүйедегі атқарушы
бөліктерімен басқару жүйесінен келетін сигналға байланысты роботтың
қозғалуы.
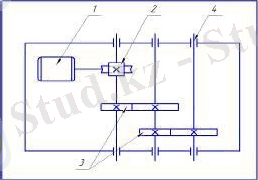
Жетектің кинематикалық схемасы (1. 1 сурет) .
Жетек манипулятордың технологиялық мүмкіндіктерімен оның
параметрлерін және оның толық жұмысында маңызды рөл атқарады. Жетектің
негізгі параметрлері: қуат, жылдамдық, тез әсер етуі және командалық
сигналды өңдеудің дәлділігі.
1 - қозғалтқыш; 2 - бұрамдық беріліс; 3 - тік тісті цилиндрлік беріліс;
4 - подшипник.
1. 1 сурет - Жетектің кинематикалық схемасы
Жетекті таңдар алдын, ең бірінші, бірнеше белгілерге көңіл бөлу қажет.
Олар: энергия тасымалдаушы, атқарушы қозғалтқыштардың түрлері, басқару
амалдары, энергияны қолдану амалдары.
Жетектерде әртүрлі берілістер қолданылады. Мысалы: тісті беріліс,
шынжырлы беріліс, бұрамдық беріліс. Онымен қоса әртүрлі үйлестіру арқылы
14
жасалған берілістер де қолданылады. Қиыстыру арқылы жасалған жетектер де
қолданылады. Олар транспорттық, ауыр жүктерді көтеру кезінде, өндіруші
және т. б. машиналарда кездеседі. Бірақ кез келген жағдайда жетектің ең
негізігі сипаттамасы ретінде пайдалы әрекет коэффициенті (ПӘК), қуат,
валдың бұрыштық жылдамдығы және т. б. саналады.
Жетектің негізгі сипаттамалары:
а) механикалық сипаттамасы - валдың айналу кезіндегі бұрыштық
жылдамдығының электромагниттің моменті М ге тәуелділігі. Механикалық
сипаттама жетектің статикалық және динамикалық режимдері кезіндегі
анализге қажетті құрал саналады;
б) қозғалтқыштың электромеханикалық сипаттамасы - бұл ω валдың
айналу кезіндегі бұрыштық жылдамдығының I тоққа тәуелділігі.
Автоматты жетек энергиясына байланысты бірнешеге бөлінеді:
а) электрикалық жетек, механикалық қозғалыстардың негізі электро-
қозғалтқыш болып табылады;
б) пневматикалық - жетек, сығылған ауаның энергиясы механикалық
энергияға түрленеді;
в) гидравликалық - жетек, сұйықтықтың қозғалуы нәтижесінде ме-
ханикалық энергияны алу.
1. 3 Электрлік жетек
Электржетек машинаның жұмыс органының қозғалысын қозғаушы
және оның технологиялық процесын басқаратын электромеханикалық
құрылғы болып табылады. Ол үш бөліктен құралады: механикалық
энергияны түрлендіретін электр қозғалтқыш, машинаның жұмыс органына
механикалық энергияны жеткізуші механикалық бөлік, технологиялық
процестермен жекеленген критерилер бойынша оңтайлы қамтамасыз ететін
жүйелік басқару.
Қозғалтқыштың
ерекшелігі мен басқару жүйесінің
мүмкіндіктері динамикалық жүктердің механикалық құрылғыларда және
басқада бірқатар факторларға технологиялық операциялардың орындалу
анықтығын және өндірістік механизмін анықтауды басқару(1) . Екінші
жағынан, жетектің механикалық бөлігі оның қозғалысының шарты оның
массасы және оның нақты
берілуі және тағы басқада шарттары
қозғалтқыштың жұмысы және басқару жүйесіне байланысты, сондықтанда
жетектің электрлік және механикалық элементтері бірыңғай
электромеханикалық жүйені яғни, өзара тығыз қатынаста орналасқан
құрамдас бөліктерді қалыптастырады. Электромеханикалық жүйесінің сипаты
жұмыс машинасының көрсеткіштеріне ең маңызды шешуші әсер етеді және
үлкен дәрежеде технологиялық процестердің сапасы мен экономикалық
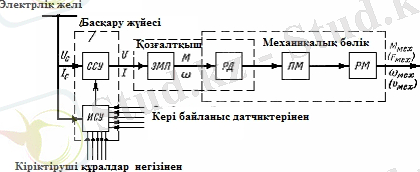
тиімділігін анықтайды. Автоматтандырылған электржетегін
(1. 2 сурет)
дамыту машина жобалауды жетілдіру мен технологиялық процестердің
түбірімен өзгертуі болашақта басқада халықтық шаруашылық салаларында
ілгерілеуге алып әкеледі.
15
1. 2 сурет - Автоматтандырылған электржетегі сызбасы
Электржетегінің артақшылықтары:
а) жұмыс жасайтын жетектің электрқозғалтқышының қуаты қажетті
мөлшерге байланысты таңдалады;
б) электрикалық қозғалтқыш іштен жанғыш жылулық қозғалтқышқа
қарағанда өрт жағдайында қаупі аз;
в) электржетек тез арада, керек болса, жиі машинаны қосуға әрі
ажыратуға, мүмкіндігінше бірсарынды түрде тежеуге мүмкіндік береді;
г) электроқозғалтқыштың валына түскен жүкте өзгеріс болса жүйеден
электр энергиясын реттейтін арнайы құрылғылар қажет емес;
д) электржетегі жұмыс машинасының электроқозғалтқышының керекті
типін таңдау жол ашты;
е) электр жетегі кезінде сатылы түрде немесе бірыңғайлы түрде жұмыс
машинасының жиілігін реттеуге болады;
ж) электрикалық қозғалтқыш үлкен қашықтықтағы және жұмыс
машинасының салдарынан туындайтын ауыр жүктерді көтеруге мүмкіндік
береді;
и) электрикалық жетек үлкен жүрдектілікті және жұмыс машинасының
үлкен өнімділігіне жол ашады;
й) электрикалық қозғалтқыш электр энергиясын экономдайды және
тежеу кезінде оны электрикалық жүйеге береді;
к) электржетек қолданылған кезде жеңіл түрде, әрі толыққанды
машинаны және құрылғыны автоматизировать етуге болады;
л) электқозғалтқыш басқа қозғалтқыштармен салыстырғанда үлкен
ПӘК-і бар;
м) жұмыс машинасына ыңғайлы түрде үлкен
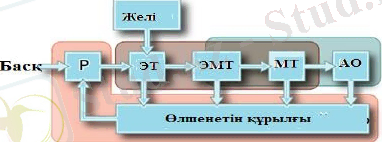
теңгерумен шығарады (1. 3 сурет) .
Қозғалуына байланысты электржетек мына типтерге бөлінеді:
а) сызықты ЭЖ;
б) айналмалы;
в) дискретті.
16
1. 3 сурет - Функционалды схема
Функционалды элементтер:
а) реттегіш (Р) - элетржетегіндегі процесстерді басқаруға арналған
құрылғы;
б) электрикалық түрлендіргіш (ЭТ) жүйедегі электр энергиясын тұрақты
немесе айнымалы тоқ кезіндегі реттелетін кернеуге түрлендіру;
в) электромеханикалық түрлендіргіш (ЭМТ) - элетр энергиясын ме-
ханикалық энергияға түрлендіруге арналған қозғалтқыш;
г) механикалық түрлендіргіш
(МТ) қозғалтқыштың айналу жыл-
дамдығын өзгертуі мүмкін;
д) басқ - басқару әсері;
ж) ао - атқарушы орган.
Функционалды бөліктері:
а) күштік бөлігі немесе ажыратылған реттеужүйесіндегі элетржетегі;
б) механикалық бөлігі;
в) электржетегінің басқару жүйесі.
1. 3. 1 Электржетектің классификациясы.
Электржетектің механикалық энергияны тарату әдістеріне қарай үш
негізгі түрге бөлуге болады: топтық электржелек, жеке және өзара
байланысты электр желегі.
Топтық электржетек бірнеше жұмыс машинасының атқарушы
органдарын немесе бірнеше атқарушы органдарды бір жұмыс машинасында
қозғалысын қамтамасыз етеді(2) . Механикалық энергияның бір
қозғалтқыштан басқа бірнеше жұмыс машиналарына берілуі және олардың
арасындағы таралу бір немесе бірнеше трансмиссияның көмегі арқылы
жүзеге асады. Мұндай топтық жетек трансмиссия деп аталады (1. 4 сурет) .
Электржетек энергияны тасымалдау барысында трансмиссиялауда
техникалық кемшілік қазіргі уақытта тіптен қабылданбайды. Өз кезегінде ол
орнын жеке және өзара тығыз қатынасқа береді.
Топтық жетек трансмиссиялық және топтық желектермен
салыстырғанда бірқатар артықшылықтар мен мүмкіндіктерге ие: өндірістік
объектілер ауыр трансмиссиялар мен аудару қондырғыларына бөгет
жасамайды; жұмыс жағдайы жақсара түседі, механизмдерді жеке басқару
нәтижесінде еңбек өнімділігі жоғарылайды, объектінің шаң басуы азаяды,
жұмыс орнының жарықтануы жақсарады, қызмет көрсетіп отырған
17
персоналдың жарақат алуы қысқарады. Одан бөлек, жеке электр жетегі
неғұрлым жоғарғы энергетикалық көрсеткіштермен ерекшеленеді(3) .
Трансмиссиялық жетек істен шыққан кезде немесе машина тобының
электрқозғалтқышын жөндеу
кезінде жұмыстан шығуы 1. 5
суретте
көрсетілгендей бір жұмыс машинасының тоқтауына бір ғана электр
қозғалтқыштың тоқтауы асер етеді.
1. 4 сурет - Электржетектің топтық трансмиссиның құрылымдық
сызбасы
1. 5 сурет - Топтық электр жетектің құрылымдық сұлбасы
Жеке электр желек
әртүрлі
заманауи машиналарда кеңінен
қолданылады, мәселен ауыр металкескіш станоктарда, металлургиялық
өндірістегі жалға алынған станоктарда, көлемді транспорттық машиналарда,
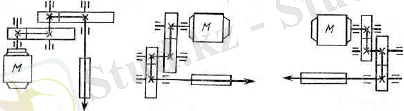
экскаваторлар мен манипуляторлы роботтарда қолданылады. Жеке жетекті
пайдалану үлгісіне бөлшекті фрезерді станоктың қызмет етуін алуға болады
(1. 6 сурет), электр жетектің басты қозғалыс бөліктеріне ие (үш ұршықты
жетек) .
Өзара
байланысты электржетек электрқозғалтқыш құрылғымен
өзарабайланыстағы екі немесе бірнеше электрлік және механикалық
қатынасты құрайды(4) .
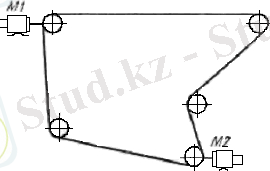
Өзара байланысты электржетекке мысал ретінде шынжырлы конвейр
келеді. 1. 7 суретте осындай желектің сұлбасы көрсетіледі, жұмыс мүшесі
болып шынжыр орналасады, ол екі немесе бірнеше қозғалтқыштар арасынан
өтеді (М1, М2) . Бұл екі қозғалтқыш амал жоқ бірдей жылдамдықта жұмыс
істейді.
Өзара байланысты электржетек көбінесе қазіргі заманауи автокөліктер
мен агрегаттар, мысалы ретінде теміркескіш көшіру станоктары және
18


программалық басқаруы бар станоктар, қағаз жасаушы мәшинеде
полиграфиялық өндірістегі ротациялық мәшине, текстильді агрегаттар,
синтетикалық қабық және т. б.
1. 6 сурет - Жеке электржетектің жұмыс органы бөлшектік құрылғысы
1. 7 сурет - Конвейердің өзара қатынастағы желек сұлбасы
Қозғалыс кезінде электрлі жетек қамтамасыз ете алады: бір бағытты
айналмалы қозғалыс, айналмалы кері және үдемелі айналмалы қозғалыс(5) .
Айналмалы бір бағытты қозғалыс, сондай ақ реверсивті қозғалыс электр
желекте әдеттегі орындауды жүзеге асырады. Үдемелі қозғалыс электр
қозғалтқышты
айналмалы қозғалысты әдеттегі орындаумен механизмді
түрлендіруді пайдалану арқылы алынған болуы мүмкін, (қанатты, бұрандалы,
тарпалы т. б. ) немесе үдемелі қозғалсы үшін электрқозғалтқышты арнайы
(сызықтық электрқозғалтқыш, қозғалтқыш деп
аталатын) орындауды қолдану арқылы жүзеге асырылады.
Электр жетекті бақылау дәрежесі бойынша былай болуы мүмкін:
а) реттелмейтін -жұмыс машинасының атқарушы органының әсерінен
бір жұмыс жылдамдығының үрейлі әрекеттерінің нәтижесінде ғана өзгеретін
желектің параметрлері әрекеті үшін тартылады;
б) реттелетін - машинаның атқарушы органының жылдамдығы мен
желектің басқарушы құрылғысының параметрлерінің әсерінен өзгеретін
немесе өзгермейтіндігін хабарлау үшін;
в) бағдарламалық - басқару - бағдарламаның берілген тапсырмасына
сәйкес басқару;
19
г) қадағалау - жұмыс машинасының атқарушы органының қозғалысын
автоматты түрде өңдеуіне белгілі бір дәлдікпен өз бетінше берілген сигналмен
сәйкестігін қадағалау;
д) бейімді - басқару жүйесі параметрлерін автоматты түрде таңдайтын
немесе машинаның жұмыс істеу жағдайлары өзгерген кезде оңтайлы режимін
дамыту мақсатындағы құрылым.
Электржетекті берілу құрылғысының сипатына қарайда жіктеуге
болады. Бұл жағдайда электр жетек төмендегідей болады:
а) редукторлы, бұл құрамы редуктордан тұратын айналмалы қозғалысты
электржетекке жеткізіп отыратын өткізгіш құрылғыға;
б) редукторсыз, бұл құрамы редуктордан тұрмайтын
электрқозғалтқыштан немесе тікелей жұмыс органынан немесе өткізгіш
құрылғысынан қозғалысты жүзеге асырылатын берілу.
Автоматтандыру дәрежесі бойынша былай бөлуге болады:
а) қолмен басқарылатын автоматтандырылмаған электржетек; қазіргі
кезде мұндай жетек тұрмыстық және медициналық және тағы басқада шағын
қуатты техникалардың қондырғыларында болмаса негізінен сирек кездеседі;
б) автоматты реттеу парметрлерімен басқарылатын автоматтандырылған
электржетек;
в) оператордың қатысуынсыз өңдеу әсерінен басқарылатын автоматты
құрылғы - автоматты электржетек.
Электржетектің соңғы екі түрі көп жағдайларда кеңінен пайдаланылады.
Соңында, ток бойынша сұрыптауда тұрақты және ауыспалы
электржетек пайдаланылады.
Басқару типіне байланысты:
а) автоматты ЭЖ, автоматты реттеу арқылы басқару;
б) программалық басқарылатын ЭЖ;
в) бақылағыш ЭЖ;
г) позициялық
ЭЖ, автоматты түрде атқарушы органның орнын
реттегіш;
д) бейімделгіш ЭЖ.
Қимылдың сипаттамасына қарай:
а) айналу қимылы бар ЭЖ;
б) түзулік қозғалтқышы бар Түзулік ЭЖ;
в) дискреттік ЭЖ.
Беріліс құрылғысының сипаттамасына қарай:
а) редукторлы ЭЖ (редуктормен немесе мультипликатормен) ;
б) электрогидравликалық (гидравликалық құрылғысы бар беріліс) ;
в) ЭЖ (электр энергияны қимылға түр-
лендіретін беріліс) .
Тоқтың түріне қарай:
а) айнымалы тоқ;
б) тұрақты тоқ.
20
Амалдарды орындау маңыздылығына қарай:
а) басты ЭЖ, бас қимылын қамтамассыз етуші немесе басты амалды
(көп қозғалтқышты ЭЖ) ;
б) қосалқы ЭЖ;
в) беріліс жетегі.
1. 3. 2 Электржетектің жұмыс режимі.
Электржетегіндегі режимдер орнатылған (жұмыстың номиналды
режимі) және өтпелі (пуск, реверс, тежегіш) болып бөлінеді. Орнатылған
(номиналды режим жұмысы) и өтпелі (пуск, реверс, тежегіш) (6) .
Электржетектің орнатылған режимі моменттің динамикалық нөлдік
шартына тең болғанда анықталады. Бұл режим қозғалтқыштың бұрыштық
жылдамдығының тұрақты болуымен уақыт бойынша және қозғалтқыш пен
кедергінің моменттерінің өлшеміне тең шарты арқылы ерекшеленіледі (7) .
Орнатылған режимде болатын момент жылдамдықтың функциясы кезінде
М = Мс тепе-теңдігі тек кедергі моменті қалыпты өлшем немесе жылдамдық
функцисясы болған жағдайда ғана орындалады. Егер МС функция болса,
мысалы, жолы (айналу бұрышы), онда тұрақты бұрыштық жылдамдық кезінде
кедергі моменті уақыт бойынша өзгереді, онымен қоса орнатылған режим
мүмкін емес.
Орнатылған режим статикалық қасиетімен ерекшеленіледі.
Бір орнатылған жағдайдан екіншісіне өту кезінде жылдамдықпен
моменттің, тоқтың өзгеру кезінде жасалатын режимді Өтпелі режим деп
атайды (8) .
Электржетегінде өтпелі режимдердің пайда болуы өнеркәсіптік процесс
кезінде жүктің өзгеруі кезінде немесе электржетекті басқару кезіндегі әсерінің
нәтижесінде және т. б. (пуск, тоқтату, айналу бағытының өзгерісі) . Өтпелі режим
электржетегінде төтенше жағдай кезінде немесе
шарттарының сақталмау нәтижесінде (мысалы, кернеудің өзгеруі немесе
жүйенің жиілігі, кернеудің симметриясыздығы және т. б. ) пайда болуы
мүмкін.
Электржетектің өтпелі режимінің қасиеті жұмыс жасайтын машинаның
құрамына,
қолданылатын
қозғалтқыштың типіне және механикалық
алмасуына, әсер ету принципына және басқару аппаратурасына, онымен қоса
қозғалтқыштың жұмыс жасау режиміне байланысты (пуск, тежеу, қабылдау
және нөлдеу, жүктер және т. б. ) . Өтпелі режим динамикалық қасиеттерімен
сипатталады.
1. 3. 3 Электржетектің жұмыс теңдігі.
Электр энергиясын механикалыққа түрлендіретін электрқозғалтқыштар,
айналу қозғалысын жасайды; машина-қарулардың да маңызды бөлігі
айналатын жұмыс органы бар; сондықтан да қозғалыс теңдігінің шешімін ең
алдымен айналу қозғалысы үшін жасау маңыздырақ болып табылады.
21
Динамиканың негізгі заңдарына сай айналатын дене моментінің осьтік
айналымына қатысты векторлық қосындысы іс-әрекет(қимыл) моментінің
санының туындысына тең:
∑𝑛𝑖=1 M𝑖 =
𝑑(𝐽𝜔)
𝑑𝑡
.
(1. 1)
... жалғасыСіз бұл жұмысты біздің қосымшамыз арқылы толығымен тегін көре аласыз.
- Іс жүргізу
- Автоматтандыру, Техника
- Алғашқы әскери дайындық
- Астрономия
- Ауыл шаруашылығы
- Банк ісі
- Бизнесті бағалау
- Биология
- Бухгалтерлік іс
- Валеология
- Ветеринария
- География
- Геология, Геофизика, Геодезия
- Дін
- Ет, сүт, шарап өнімдері
- Жалпы тарих
- Жер кадастрі, Жылжымайтын мүлік
- Журналистика
- Информатика
- Кеден ісі
- Маркетинг
- Математика, Геометрия
- Медицина
- Мемлекеттік басқару
- Менеджмент
- Мұнай, Газ
- Мұрағат ісі
- Мәдениеттану
- ОБЖ (Основы безопасности жизнедеятельности)
- Педагогика
- Полиграфия
- Психология
- Салық
- Саясаттану
- Сақтандыру
- Сертификаттау, стандарттау
- Социология, Демография
- Спорт
- Статистика
- Тілтану, Филология
- Тарихи тұлғалар
- Тау-кен ісі
- Транспорт
- Туризм
- Физика
- Философия
- Халықаралық қатынастар
- Химия
- Экология, Қоршаған ортаны қорғау
- Экономика
- Экономикалық география
- Электротехника
- Қазақстан тарихы
- Қаржы
- Құрылыс
- Құқық, Криминалистика
- Әдебиет
- Өнер, музыка
- Өнеркәсіп, Өндіріс
Қазақ тілінде жазылған рефераттар, курстық жұмыстар, дипломдық жұмыстар бойынша біздің қор #1 болып табылады.

Ақпарат
Қосымша
Email: info@stud.kz