Көпқозғалтқышты асинхронды электржетекті синхронды айналымға келтіру үшін тиристорлы кернеу түрлендіргіші мен микропроцессорлық басқаруды жобалау және зерттеу

1
ҚАЗАҚСТАН РЕСПУБЛИКАСЫ БІЛІМ ЖӘНЕ ҒЫЛЫМ
МИНИСТРЛІГІ
Коммерциялық емес акционерлік қоғамы
АЛМАТЫ ЭНЕРГЕТИКА ЖӘНЕ БАЙЛАНЫС
УНИВЕРСИТЕТІ
Электр энергетика
Электр энергетикасы
. факультеті
мамандығы
«Өндірістік қондырғылардың электр жетегі және автоматтандырылуы » кафедрасы
жобаны орындауға берілген
ТАПСЫРМА
Студент
Балмурзина Айымгүл
_
(аты - жөні)
Жоба тақырыбы Синхронды айналатын көпқозғалтқышты автоматтандырылған
электр жетегі
ректордың « 29 » қыркүйек № 124 бұйрығы бойынша бекітілген.
Аяқталған жұмысты тапсыру мерзімі: « 18 » мамыр 2015 ж.
.
Жобаға
бастапқы деректер (талап етілетін жоба нәтижелерінің
параметрлері және нысанның бастапқы деректері)
К1810 процессоры, 16 - разрядты шиналары мен адрестің 20 разрядты
шинасы. Осы микропроцессордың құрамында 3 транзистор бар, 1, 75 Вт
тұтынады және ν = 5 МГц
.
Диплом жобасындағы
әзірленуі тиіс сұрақтар тізімі
немесе
диплом жобасының қысқаша мазмұны:
Дипломдық жұмыс иіру өндірісіндегі түту аппараттарының
көпқозғалтқышты асинхронды автоматтандырылған электржетектерін
зерттеуге арналған. Қазіргі кезде қолданылып жүрген электржетектердің
артықшылықтары мен кемшіліктері қарастырылып, олардың тиімдігілі
дәлелденген.
Асинхронды айналатын көпқозғалтқышты асинхронды
электржетегін қолдану әдісі, жұмысы және оның математикалық моделі
көрсетіліп, сипаттамалары алынған. Түту аппараттарының кернеуін
тиристормен түрлендіру бойынша микропроцессормен басқарылатын
жүйенің алгоритмі берілген.
2
Сызба материалдарының (міндетті түрде дайындалатын сызуларды
көрсету) тізімі
Роторлық тізбегінде электрлік байланысы бар көпқозғалтқышты
асинхронды синхронды айналысқа ие электр жетегі, СА АКЭЖ әр түрлі
үйлесімсіздік бұрыштарында және жалпы роторлық кедергі кезіндегі
механикалық сипаттамасы,
қозғалтқыштардың жүктемелерінің әр
түрлілігін анықтайтын КТТ бар АКЭЖ функционалды сұлбасы, КТТ бар
АКЭЖ механикалық сипаттамалары, роторлы токтардың фазаларының
бергіштері (а) мен қозғалтқыштардың жүктемелену деңгейін анықтау
блогының (б) сұлбалары, ДФ және ЖДАБ элементтерінің кернеулерінің
уақытша диаграммалары,
кернеудің симметриялы емес
тиристорлы
түрлендіргіштері бар үш қозғалтқышты электр жетегі, АКЭЖ СА - ның КТТ
- мен механикалық сипаттамасын есептеу бағдарламасының алгоритмінің
блок - сұлбасы, электр қозғалтқыштардың роторлық тізбектердегі
электрлік байланысымен статикалық қисық есептері, микропроцессорлық
жүйенің құрылымдық сұлбасы, есептеуіш - логикалық блокты құрылымдық
ұйымдастыру
.
Негізгі ұсынылатын әдебиеттер
1. Вешеневский С. Н. Характеристики двигателей в электроприводах. - М. :
Энергия, 1966; 2. Бердибеков А. О., Тергемес К. Т. Многодвигательный ЭП
синхронного вращения с повышенной синхронизирующей способностью //
Труды международной научной конференции «Информационные технологии и
АПП». - Алматы, КазНТУ, 2002 ; 3. Лежебрух Г. О. Использование
современных чесальных машин и аппаратов в шерстенной промышленности.
- М. : ЦНИИГ, 1981 ; 4. Тергемес К. Т. Многодвигательные асинхронные
электроприводы чесальных аппаратов с тиристорными преобразователями
частоты. - Алматы. : Изд. КБТУ, 2007 ; 5. Н. А. Африканов, Л. Т. Музылев,
П. М. Панин, В. Л. Протасова / Шерстопрядильное оборудование . М. : Легкая
индустрия. 1980 ; 6. К. Т. Тергемес, А. О. Бердибеков, Л. А. Байназарова . АС
№37243 РК. Многодвигательный электропривод переменного тока/ //
Открытия. Изобретения., 2003
3
.
4
АҢДАПТА
Дипломдық жұмыс иіру өндірісіндегі түту аппараттарының
көпқозғалтқышты асинхронды автоматтандырылған электржетектерін
зерттеуге арналған. Қазіргі кезде қолданылып жүрген электржетектердің
артықшылықтары мен кемшіліктері қарастырылып, олардың тиімдігілі
дәлелденген.
Асинхронды айналатын көпқозғалтқышты асинхронды электржетегін
қолдану әдісі, жұмысы және оның математикалық моделі көрсетіліп,
сипаттамалары алынған.
Түту аппараттарының кернеуін тиристормен түрлендіру бойынша
микропроцессормен басқарылатын жүйенің алгоритмі берілген.
Өмір тіршілік қауіпсіздігі бөлімінде техникалық қондырғыларды
пайдаланудағы еңбек жағдайына талдау жасалған, сонымен қатар синхронды
қозғалтқыштағы шудың деңгейіне акустикалық есеп жүргізілген және электр
зарядтарының адамға әсері қарастырылып, қорғаныстық жерге қосу
құрылғысына есеп жүргізілген.
Экономика бөлімінде тұтынушылардың техникалық - экономикалық
есебі жүргізілген. Соның ішінде капиталды қаржы құны, эксплуатациядағы
ағымдағы жылдық шығындары, жалақы есептелімі, қызметкерлердің орташа
айлық жалақы мөлшері, электр қуатына жұмсалатын қаржы шығыны энергия
шығын есептелген.
5
АННОТАЦИЯ
Дипломная работа посвящена исследованию многодвигательного
асинхронного электропривода синхронного вращения чесальных аппаратов в
производстве. Рассмотрены преимущества и недостатки электроприводов,
которые в настоящее время применяются и доказана их эффективность.
Показан способ применения многодвигательного асинхронного
электропривода синхронного вращения, его работа и математическая модель,
получены их характеристики.
Представлен алгоритм системы микропроцессорного управления по
тиристорному преобразователю напряжения чесальных аппаратов.
В разделе безопасность жизнидеятельности сделан анализ рабочего
состояния при использовании технических устройств, также проведен
акустический анализ уровня шума в синхронном двигателе и рассмотрены
влияние электрических зарядов на человека, расчет защитного устройства
включения в землю.
В экономическом разделе произведен техно-экономический расчет
потребителей. В частности, капитальная финансовая стоимость, текущий
годовой расход при эксплуатации, расчет заработка, среднемесячный размер
заработка сотрудников, финансовый расход, затрачиваемый на электрическую
мощность, расход энергии.
6
ANNOTATION
Thesis is devoted to the study of multi - engine asynchronous drive of
synchronous rotation of the carding machines in production. The advantages and
disadvantages of asynchronous drives, which are currently used and proved their
effectiveness.
The use of multi - engine asynchronous drive of synchronous rotation, its work and
the mathematical model are shown, is specifications are obtained.
The algorithm of the microprocessor control on thyristor voltage converter of
carding machines is shown.
Analysis of the working state by using technical devices is made in HS
section, also acoustic analysis of the level of noise in the synchronous motor, and
the effect of electric charges on the person, the calculation of the safety device
included in the land are performed.
Techno - economic calculation of consumers is made in the economic
section. In particular, the financial cost of capital, the current annual consumption
during operation, the calculation of earnings, average monthly earnings of
employees, the financial expenditures spent on electrical power consumption.
7
БЕЛГІЛЕУЛЕР МЕН ҚЫСҚАРТУЛАР
АКЭЖ - асинхронды көпқозғалтқышты электр жетегі
СА - синхронды айналатын
БІҚ - бірқалыпты іске қосу
КТТ - Кернеудің тиристорлы түрлендіргіші
ЖДАБ - жүктемелену деңгейін анықтау блогы
ИФБЖ1-3 - импульстік-фазалық басқару жүйесі
ЭҚК - электр қозғаушы күш
ПӘК - пайдалы әсер коэффициенті
ЭЕМ - электр есептеуіш машина
ЭЖ - электр жетегі
МПБЖ - микропроцесорлық басқару жүйелері
МП - микропроцессор
МПТ - микропроцессорлық топтама
ҮИС - үлкен интегралдық схема
БМП - біркристалды микропроцессор
БМК - біркристалды микроконтроллер
CИФБЖ - сандық импульстік-фазалық басқару жүйесі
АСТ - аналогтық-сандық түрлендіргіш
ЖБР - Жалпы белгілеудегі регистрлары
ДШ - деректер шинасы
ША - шинаның адресі
БШ - басқару шинасы
АЛҚ - арифметика-логикалық құрылғы
ЖБР - жалпы белгілеуші регистрлер
СЖ - синхрондау жүйесі
DSP - Digital Signal Processor (сандық дабылдық процессорлар)
RISC - Reduced Instruction Set Computer (қысқартылған бұйрықтар жиынтығы
бар компьютер)
CISC - Complicated Instruction Set Computer (толық бұйрықтар жиынтығы бар
процессорлар)
ТҚ - түйіндесу құрылғысы
МК - микроконтроллер
ТҚ - Түйіндесу құрылғысы
ОҚ - Операциялық құрылғы
ИБ - импульсті бергіш
БТ - Бағдарламаланатын таймер
БМЭЕМ - біркристалды микро-ЭЕМ
8
МАЗМҰНЫ
Кіріспе
10
1
1. 1
1. 2
1. 3
1. 4
1. 5
1. 6
1. 7
2
2. 1
2. 2
2. 3
3
3. 1
3. 2
3. 3
3. 4
Кернеудің тиристорлы түрлендіргіші бар тұтқыш
аппараттардың көпқозғалтқышты асинхронды синхронды
айналысқа ие электр жетегін микропроцессорлық басқаруды
жасап шығару
Көпқозғалтқышты асинхронды синхронды айналысқа ие
электржетекті реостатты реттеу кезінде зерттеу
Тиристорлы түрлендіргіші бар асинхронды синхронды
айналысқа ие көпқозғалтқышты электржетекті зерттеу
Көпқозғалтқышты асинхронды электржетектің синхронды
айналысын синхронды тежеу және жылдамдығын реттеу, алдын
- ала синхрондауды жасау
Кернеудің тиристорлы түрлендіргіштері бар көпқозғалтқышты
асинхронды электржетектің механикалық сипаттамасын есептеу
бағдарламасының алгоритмін жасау
Көпқозғалтқышты синхронды айналатын микропрофессорлы
басқарылатын асинхронды электржетек
Кернеудің тиристорлы түрлендіргіштері бар көпқозғалтқышты
асинхронды электржетекті микропроцессорлық басқару
Реостатты реттеу, кернеудің тиристорлы түрлендіргіштерін
және кернеудің тиристорлы түрлендіргіштерін
микропроцессорлық басқарумен пайдалану кезінде асинхронды
көпқозғалтқышты электржетекті талдау
Өмір тіршілік қауіпсіздігі бөлімі
Техникалық қондырғыларды пайдаланудағы еңбек жағдайын
талдау
Синхронды қозғалтқыштағы шудың деңгейіне акустикалық есеп
жүргізу
Электр зарядтарының адамға әсері. Қорғаныстық жерге қосу
құрылғысына есеп жүргізу
Экономикалық бөлім
Есептеуге қажетті бастапқы деректер
Жалақыға кететін шығындарды есептеу
Негізгі материалдардың өзіндік құнын анықтау
Электр энергиясына шығынды есептеу
Қорытынды
Қолданылған әдебиеттер тізімі
9
11
12
14
21
24
28
38
46
50
50
51
54
58
58
58
59
59
65
66
КІРІСПЕ
Қазіргі кезде көптеген өндіріс орындарында ең көп қолданылатын
қозғалтқыштардың бірі асинхронды қозғалтқыш (АҚ) болып табылады.
Себебі, айналу жылдамдықтары және қуаттары бірдей асинхронды
қозғалтқыш пен тұрақты токты қозғалтқышты салыстыратын болсақ, мұнда
АҚ-ның салмағы 1, 5 - 2 есе жеңіл, бағасы арзан, оны жасауға түсті металл аз
кетеді, оны пайдалану қарапайым және сенімді. Алдынғы кездерде АҚ
көбінесе реттелмейтін электржетектерде қолданыс тапқан. Бірақ жартылай
өткізгішті құрылғылардың дамуына, соның ішінде күштік тиристордың және
транзисторлардың пайда болуына байланысты көптеген күштік түрлендіргіш
құрылғылары пайда бола бастады. АҚ-ның жылдамдығын реттеудің
рационалды тәсілі болып коректендіруші кернеудің жиілігін өзгерту болып
табылады. Қазір көбінесе АҚ-ның айналу жылдамдығын реттеу үшін жиілік
түрлендіргіштері қолданылады. Жиілік түрлендіргіші (инвертор) - жиіліктік
реттелетін электржетектің айрылмас бөлігі және
айналу жылдамдығын реттеуге арналған. Жиілік түрлендіргіштер басқарудың
аса оңайға түспейтін алгоритмін жүзеге асыруға, ПӘК-тің реттеуге,
қозғалтқышты қорғауға, жүктемеге байланысты жұмыс режимін оптималдауға
және де көптеген функцияларды орындауға мүмкіндік береді.
Түрлендіргіш жилікті қолдану нәтижесінде:
1. электр қозғалқыштың іске қосу тоғы азаяды, оның көлемі статор
қозғалтқышының 1 - 3 номиналға дейін шектеледі;
2. механикалық берілістердің кинетикалық буындарында динамикалық
қозғалыс шамадан тыс азаяды: муфтада, редукторда және т. б.
3. статор орама қозғалқышында электрмагнитті күш төмендейді, соның
салдарынан айналыс кесіктерінің дірілі мен оралым изоляциясының бұзылу
әсерінен статордың жұмыс жасау мерзімі жоғарылайды;
4. электртехникалық жабдықтың ілеспелі құрылымдарының талаптары
жақсарады;
5. қозғалтқыштарды іске қосу кезінде желідегі кернеу азаяды;
6. жалпы жай іске қосу техникалық жабдықтың беріктігі мен жұмыс
істеу қызметін жоғарылатады.
ЖТ базасында жай іске қосу жүйесін қолдану арқылы іске қосу саны
мен жиілігіне шектеуді алып тастауға және электр жетектердің жинақталыуын
алдын алуға болады, осы арқылы элекрт қуатын азайтуға болады.
10
1 Кернеудің тиристорлы түрлендіргіші бар тұтқыш аппараттардың
көпқозғалтқышты асинхронды синхронды айналысқа ие электр жетегін
микропроцессорлық басқаруды жасап шығару
Асинхронды көпқозғалтқыштардың пайдалану
барысында
айқындалатын құрылымының
қарапайымдылығы, сенімділігі, жоғары
энергетикалық көрсеткіштері сияқты жағымды сапасы арқасында олар электр
қозғалтқыштардың паркінде үстемдікке ие
болып кетті.
Кернеудің
тиристорлық түрлендіргіштері де жоғары пайдаланымдық және техникалық -
экономикалық көрсеткіштерге ие.
Технологиялық процестің шарттары бойынша жылдамдықты реттеуді
қажет ететін түткіш аппараттардың СА АКЭЖ соңғы жылдары түйістіргішті
басқаруы бар жетектерден кернеудің тиристорлы түрлендіргіштері негізінде
бірқалыпты іске қосылатын құрылғылармен жарақтандырылған жүйелерге
көшу негізгі мақсатқа айналды. Барлық дерлік электр жетектерін ірі
өндірушілерінің каталогтарында бірқалыпты іске қосылатын құрылғылардың
(БІҚ) бар болу дерегі осыған дәлел бола алады, бұл құрылғы шетелдік
әдебиеттерде Soft - Start жүйесі деген атқа ие болды. Бұл мақсаттың себебі,
алдымен, ресурсты және энергия үнемдегіш технологияларды енгізу қажеттігі
болып отыр. Бірқалыпты іске қосылатын құрылғылар реттелмейтін және
реттелетін электр жетек арасында аралық орында болады. Олардың атынан
көрініп тұрғанындай, БІҚ-ның негізгі тағайындауы электр қозғалтқышты
бірқалыпты таратып жіберу болып табылады, бірқатар жағдайларда бұл
реверс және тежеу. Электр қозғалтқыштың әр тура іске қосылуы оның қызмет
мерзімін төмендететінін есепке ала отырып, БІҚ-ды қолданудың орындылығы
әбден анық болды.
Бірқалыпты іске қосылатын құрылғыларды пайдалану тиімділігі
мәселесін талқылай отырып, олардың келесі артықшылықтарын бөліп
көрсеткіміз келеді:
- іске қосу токтарының және қозғалтқыштың мезеттерін шектеу
мүмкіндігі, бұл қозғалтқыштың және механикалық бөлігінің беріктігін
арттырады;
- қозғалтқыштың орамаларын оқшаулағыштарының жедел көнеруінің
дереккөзі болып табылатын қозғалтқышқа жылулық жүктемелердің қарқынды
төмендеуі;
-
оқшаулағыштың механикалық бұзылуына алып келетін,
қозғалтқыштың орамаларындағы жоғары электрдинамикалық әрекетін
болдырмау;
- коммутациялық аппаратураның беріктігін арттыру.
11
1. 1 Көпқозғалтқышты асинхронды синхронды айналысқа ие электр
жетекті реостатты реттеу кезінде зерттеу
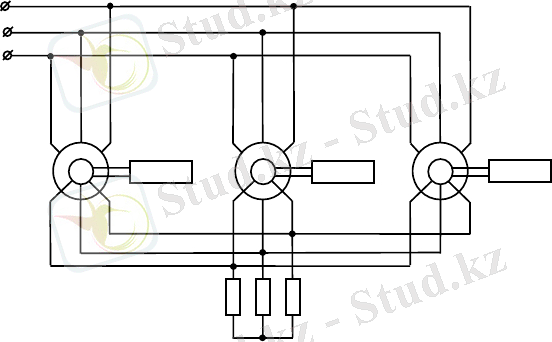
Айналыстың жылдамдығын реттеудің бұл әдісі АКЭЖ фазалы роторы
бар асинхронды қозғалтқыштармен ғана іске асырылуы мүмкін. Тізбектің
активті кедергісін өзгертуге асинхронды қозғалтқыштардың жалпы роторлық
тізбегіне 1 суретке сәйкес жұлдызбен қосылған қосымша кедергіні қосумен
қол жеткізіледі, бұл ретте электр қозғалтқыштардың статорлық орамаларының
аттас фазалары өзара қосылған. Электр қозғалтқыштардың біліктерінде
жүктемелердің түрлі мәндері кезінде олардың роторларының электрлі
қосылған орамаларының арасында теңдеуші токтар өтеді, олар статорлардың
магнитті өрісімен өзара әрекет жасай отырып, роторлардың үйлесімсіздігінің
азаюына әсер ететін теңдеуші иін күшін қалыптастырады.
1 суретте роторлы тізбектерде электрлік байланыстары бар СА АКЭЖ
сұлбасы ұсынылған.
АҚ1
жүктеме
1
АҚ
2
жүктеме2
АҚ
3
жүктеме
3
Қосымша
кедергі
Сурет 1 - Роторлық тізбегінде электрлік байланысы бар
көпқозғалтқышты асинхронды синхронды айналысқа ие электр жетегі
Бұрын аталып кеткендей, бірінші, екінші және үшінші машиналармен
дамытылатын мезеттер екі құрастырушылардың сомасын көрсетеді:
синхрондаушы және асинхронды.
Синхрондаушы құрастырушы роторлардың бұрыштық үйлесімсіздігіне
қарай барлық үш машинаға әсер ете отырып, қозғалтқыштардың сенімді
айналысын сүйемелдейді және келесіге тең:
12
M
си н (1, 2, 3 )
=
S
m m
3
3
S S m
S m S
L
1, 2, 3
)
−
S
'
m
3
'
m
L
'
m
1, 2, 3
)
.
(1)
Асинхронды құрастырушы:
M
а си н (1, 2, 3 )
=
m
S m S
3
S S m
L
1, 2, 3
)
+
3
L =1
'
m
'
m
.
(2)
мұндағы Sm =
(r2
+ 3Rê . ðåò ) σ1
x1 + x2σ1
- қауіпті сырғу, қозғалтқыштар табиғи
сипаттамада жұмыс жасаған кезде
M m максималды мезетке сәйкес келеді,
( M m =
U 2 U 2
( r + 3 Rê . ðåò σ1
2
) ;
x 1
3 Rê . ðåò
r 2
қосылған кезінде қауіпті сырғу Rê . ðåò ;
σ 1 = 1 +
Z1
Z 2
x r
x0 r0
Z 1, Z 2 - S сырғуы кезінде таторлар мен роторлардың кешенді кедергісі;
U 1, U 2, U 3 - әр қозғалтқыш үшін желі кернеуі;
I 11, I 12, I 13 және I 21, I 22, I 23 - машиналардың тиісті статорлық және
роторлық токтары;
r 1 және х 1 - тиісті қозғалтқыштардың статорларының орамаларының
активті және индуктивті кедергісі;
r 2 және х 2 - тиісті қозғалтқыштардың роторларының орамаларының
активті және индуктивті кедергісі;
х0 - контурдың магниттелгендігінің индуктивті кедергісі;
Rд - жалпы роторлық тізбектегі қосымша кедергі.
3. 1. 1 Жалпы роторлық тізбекте реттелетін кедергісі бар көпқозғалтқышты
асинхронды электр жетектің механикалық сипаттамасы
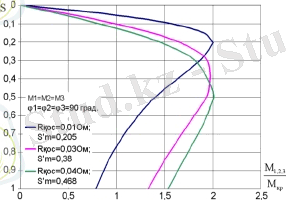
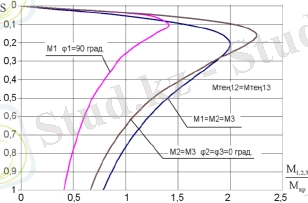
2 суретте СА АКЭЖ әр түрлі үйлесімсіздік бұрыштарында және жалпы
роторлық кедергі кезіндегі механикалық сипаттамасы көрсетілген.
13
а)
б)
Сурет 2 - СА АКЭЖ әр түрлі үйлесімсіздік бұрыштарында және жалпы
роторлық кедергі кезіндегі механикалық сипаттамасы
2, а, б суретте жүйедегі роторлардың орындарының
үйлесімсіздік
бұрыштарындағы қозғалтқыштардың
0
1, 2
0-дан 180 эл. градусқа дейінгі және
Бұрышы ∆γ 1, 3 = 0 болғанда бірінші және екінші, екінші және үшінші
қозғалтқыштар арасындағы теңдеуші иін күші ∆γ
1, 3
артуы арқылы бірте -
0
1, 3
үшінші машинаның айналу иін күші синхрондаушы құрастырушысы нөлге
тең, ал қалған машиналарда өзара тең, бірақ қарама - қарсы белгілерге ие. 3, б
0
0
1. 2
Тиристорлы түрлендіргіші бар асинхронды
синхронды
айналысқа ие көпқозғалтқышты электр жетекті зерттеу
АҚ статорларының шығуында кернеуді реттеу үшін түрлі құрылғылар
пайдаланылуы мүмкін - автотрансформаторлар, магнитті күшейткіштер және
кернеудің тиристорлы түрлендіргіштері. Кернеуді реттеушілердің соңғы түрі -
КТТ қазіргі таңда барынша таралған, мұнда кернеуді реттеу есебінен асинхронды
қозғалтқыштың статорында
токтарды және көшпелі
режимдерде
қозғалтқыштардың иін күштерін реттеу, фазаларда токтарды симметриялау,
қозғалтқыштың бірқатар қорғаныстарын реттеу және басқа да бірқатар
операциялар қамтамасыз етіледі. Бұл КТТ-нің бірқатар жетістіктерімен
анықталады: ПӘК жоғарылығы, қызмет көрсету кезіндегі қарапайымдылығы,
өндірістің жалпы технологиялық сұлбасында электр жетекті автоматтандырудың
жеңілдігі, басқарудың қолайлылығы. Сонымен қатар бұл электр
жетектің
жүйесінің елеулі кемшілігі бар, бұл жетістік төмен жылдамдықта жұмыс
жасаған кезде ротордың орамасында көп шығындарға ие болуында болып
14
отыр. Шынында да, төмен жылдамдықта ротордағы электрлік шығындар,
және, олай болса, үлкен сырғуларда барынша жоғары болуы мүмкін, бұл
дегеніңіз электр жетектің ПӘК - і азайтады. Аталған кемшілік АҚ
төмендетілген жылдамдықтағы жұмыс уақыты оның жұмыс циклінің
уақытына қарағанда аз болған жағдайда өте салмақты болмайды.
Осы электр жетек жүйесінің негізгі реттеуіш көрсеткіштеріне қысқаша
тоқталып кетейік.
Кері байланыстарды пайдаланған кезде жылдамдықты реттеу
диапазоны, мысалы жылдамдық бойынша, салыстырмалы түрде жоғары және
онға жетеді. Кері байланыстарды пайдаланған кезде қатаң сипаттамалар ға қол
жеткізуге болады.
Реттеудің үнемділігі электр жетектің жұмысының нақты шарттарына
байланысты. Атап айтсақ, төмендетілген жылдамдықтағы жұмыс уақыты цикл
уақытына қарағанда көп болмаса, онда бұл жағдайда үнемділік жоғары болуы
мүмкін. АҚ жылдамдығын реттеу бұл жүйеде бірқалыпты және табиғи
(негізгі) сипаттамадан тек қана төмен қарай жүргізіледі.
Үш фазалы КТТ негізгі элементтері токтың тіке және кері жарты
толқындарының өтуін қамтамасыз ететін қарсылы - параллельді қосылған
қуатты вентильдер болып табылады.
Қазіргі уақытта асинхронды қозғалтқыштың (оның желіге қосылуын
немесе ажыратылуын жүргізетін) статорлық тізбектерін коммутация жасауды
және қозғалтқышқа жалғанатын кернеуді реттеуді мүмкін
ететін
тиристорларды қосудың түрлі сұлбалары бар. Тиристорлы басқаруы бар
асинхронды электр жетектің негізгі сұлбаларының құрылымын таңдау оның
тез әрекет етуін және техника
-
экономикалық көрсеткіштерін
... жалғасыСіз бұл жұмысты біздің қосымшамыз арқылы толығымен тегін көре аласыз.
- Іс жүргізу
- Автоматтандыру, Техника
- Алғашқы әскери дайындық
- Астрономия
- Ауыл шаруашылығы
- Банк ісі
- Бизнесті бағалау
- Биология
- Бухгалтерлік іс
- Валеология
- Ветеринария
- География
- Геология, Геофизика, Геодезия
- Дін
- Ет, сүт, шарап өнімдері
- Жалпы тарих
- Жер кадастрі, Жылжымайтын мүлік
- Журналистика
- Информатика
- Кеден ісі
- Маркетинг
- Математика, Геометрия
- Медицина
- Мемлекеттік басқару
- Менеджмент
- Мұнай, Газ
- Мұрағат ісі
- Мәдениеттану
- ОБЖ (Основы безопасности жизнедеятельности)
- Педагогика
- Полиграфия
- Психология
- Салық
- Саясаттану
- Сақтандыру
- Сертификаттау, стандарттау
- Социология, Демография
- Спорт
- Статистика
- Тілтану, Филология
- Тарихи тұлғалар
- Тау-кен ісі
- Транспорт
- Туризм
- Физика
- Философия
- Халықаралық қатынастар
- Химия
- Экология, Қоршаған ортаны қорғау
- Экономика
- Экономикалық география
- Электротехника
- Қазақстан тарихы
- Қаржы
- Құрылыс
- Құқық, Криминалистика
- Әдебиет
- Өнер, музыка
- Өнеркәсіп, Өндіріс
Қазақ тілінде жазылған рефераттар, курстық жұмыстар, дипломдық жұмыстар бойынша біздің қор #1 болып табылады.

Ақпарат
Қосымша
Email: info@stud.kz