Фазалы роторлы асинхронды электр жетегі негізінде қанатты көтергіш қондырғысын автоматтандыру және математикалық модельдеу

9
10
11
12
АҢДАТПА
Дипломдық
жобада
қанатты
көтергіш
қондырғысының
автоматтандырылған электр жетегі және оны таңдау қарастырылған.
Бұл жобада қанатты көтергіштің түрлері, құрылысы, электр жетегі және
жұмыс режимі жөнінде мәліметтер келтірілген. Тиімді жетек ретінде фазалы
роторлы асинхронды қозғалтқыш электр жетек жүйесі таңдалып,
оның
құрылымдық
сұлбасы құрастырылған
және
негізгі элементтерінің
параметрлері анықталған. Асинхронды қозғалтқыштың табиғи және жасанды
механикалық, электромеханикалық сипаттамалары Mathcade бағдарламасында
тұрғызылды, және оның математикалық моделі мен құрылымдық сұлбасы
құрастырылған.
Matlab Simulink бағдарламасында қозғалтқыштың моделі жасалынып,
қозғалтқыш сипаттамалары салынып, әр түрлі режим кезіндегі өтпелі
процесстер зерттелді.
Қанаты көтергіш қондырғысының жұмыс жасау кезінде өрт қауіпсіздігі
мен еңбек қорғауға қатысты шаралар қарастырылған және таңдалған электр
жетектің экономикалық тиімділігі анықталды.
13
АННОТАЦИЯ
В дипломном проекте рассмотрен автоматизированный электропривод
для канатной подьемной установки .
В этом проекте приведены сведения о типах, контрукциях и принципах
работы, приводы подъемной установки. В качестве эффективного привода
выбрана электропривод асинхронный
двигатель
с фазным ротором,
разработана ее структурная схема и определены параметры основных
элементов. Приведены естественные и искуственные механические и
электромеханические характеристики асинхронного двигателя в программе
Mathcade, изучены переходные процессы в различных режимах работы.
В программе Matlab Simulink собраны схемы асинхронный двигатель с
фазным ротором и сняли все кривые характеристики переходного процесса.
Предусмотрены мероприятия по охране труда и по обеспечению
пожарной
безопасности
в
проектиреумом
объекте.
Определился
экономическая эффективность электрического привода.
14
ANNOTATION
To the project information is driven about the types, of design and principle
works of the lifting setting. As an effective drive the system of electromechanic of
asynchronous engine is chosen with a phase rotor, her flow diagram is worked out
and the parameters of basic elements are certain. The natural over are brought and
artificial mechanical and electromechanics descriptions of asynchronous engine,
transients are studied in different office hours.
Measures are envisaged on a labour protection and providing fire to safety in a
projected object.
15
Мазмұны
Кіріспе . . . 9
1 Қанатты көтергіш қондырғысының техникалық сипаттамасы . . . 11
1. 1 Қанатты көтергіш механизмінің жұмыс істеу принципі, құрылымын
және өндірісінің технологиясын сипаттау . . . 11
1. 2 Қанатты
көтермелі қондырғылардың электржетегі және оларға
қойылатын талаптар . . . 15
2 Асинхронды қозғалтқыш жүйесінің статикалық сипаттамасы . . . 18
2. 1 Табиғи механикалық сипаттамаларын есептеу . . . 18
2. 2 Жасанды механикалық сипаттамаларын есептеу және тұрғызу . . . 25
3 Жиілік түрлендіргіштің күштік схемасы және параметрлері . . . 31
3. 1 Асинхронды-вентильді каскадтағы асинхронды электржетектер
және асинхронды-вентильді каскадтың энергетикалық көрсеткіштері . . . 31
3. 2
Түрлендіргіштердің күштік схемаларын есептеу және
таңдау . . . 35
3. 3. Инвертор мен түзеткіштердің элементтерінің есептеу және
таңдау . . . 38
4 Жүйенің математикалық моделін тұрғызу . . . 42
4. 1 АҚ жүйесінің күштік бөліктерінің элементтерінің математикалық
сипаттамалары . . . 42
4. 2 Электр жетектің құрылымдық сұлбасын моделдеу . . . 44
5 Қауіпсіздік техникасы бойынша шаралар және өртке қарсы
техника . . . 53
5. 1 Автоматты электр жетегін пайдалануда техника қауіпсіздігін сақтау
ережелері . . . 53
5. 2 АЭЖ орналасқан бөлмедегі ауа алмасу (вентиляция) жүйесінің
құрылғысы және есебі . . . 56
5. 3 Дренчерлік автоматты өрт сөндіру жүйесін есептеу . . . 57
6. Экономикалық бөлім . . . 64
6. 1 Техникалық шешімдердің экономикалық дәлелдеу . . . 64
6. 2 Асинхронды-вентильді каскад арқылы басқарылатын асинхронды
электржетекті құруға және енгізуге кететін шығындар65
6. 3 Асинхронды-вентильді каскад арқылы басқарылатын асинхронды
электржетекті құруға кететін шығындар65
6. 4 Пайдалану шығынын анықтау. 67
Қорытынды . . . 75
Қолданған әдебиеттер тізімі . . . . 76
16
Кіріспе
Электр қозғалтқыштар - электр энергиясын механикалық энергияға
айналдыратын, жұмысшы машиналарды немесе механизмдерді қозғалысқа
келтіруге және сол қозғалыспен технологиялық процестерді басқаруға
арналған электрмеханикалық жүйе. Электр қозғалтқышы электр жетегінің
негізі болып табылады. Электр жетегі технологиялық процестермен тығыз
байланысты. Өз кезегінде, технологиялық ауқымға да электр жетегінің дамуы
әсерін тигізді, көптеген өндірістерді толық автоматтандыруға қол жетті.
Қанатты көтергіш қондырғысының жүк тасу қабілеті сағатына 2000
адам, 1000 тонна жүкке дейін жетеді. Қанатты көтергіш қондырғыларының
жетектеріне келесі көрсеткіштерді қолдануға болады: ПӘК, жөндеу және
пайдалану құны, жетектің тораптағы кернеудің сапасына әсері, cosφ, электр
жабдықтарының габариті кіреді. Жетек тұтынатын энергияның жартысы ғана
түрленетіндіктен энергия шығыны аз болады, соның әсерінен ПӘК жүйесі
барлық реттелетін электр жетектерінің ішінде ең жоғарғысы болып табылады;
Түрлендіргіш құрылғылары істен шыққан жағдайда жетек жылдамдықты
реттеусіз жұмыс жасата алады. Бұл ерекшелігі қанатты көтергіш тәрізді
жауапты қондырғылар үшін өте маңызды. Жетектің негізін тұрақты ток
машинасына қарағанда пайдалануда аз және арзан күтімді қажет ететін,
фазалы роторы бар асинхронды қозғалтқыш құрайды. Фазалық роторы бар
асинхронды электр қозғалтқышы сұлбаның қарапайымдылығы мен
жабдықтың арзандығына байланысты көтергіш қондырғылар үшін
таптырылмас жетек болып табылады.
Соңғы жылдары үлкен жүк көтерімділігі және қозғалыс
жылдамдығымен ерекшеленетін негізгі көтергіш қондырғыларында ерекше
электр қозғалтқышы ретінде
асинхронды вентильді каскад (АВК)
қолданылады.
Асинхронды вентильді каскадты сұлбасы екі қоректі қозғалтқыштардың
(ЕҚМ) ортақ жағдайы болып табылады. ЕҚМ бірнеше артықшылықтарға ие -
реактивті қуат ағындарын реттеу мүмкіндігі, яғни қуат коэффициенті және
электр жетегін реттеудің энергияның негізгі бөлігі түрлендірілмейтін жалғыз
жүйесі болып табылады. Олардың техникалық ерекшеліктері ретінде барлық
асинхронды каскадты сұлбалар сипаттамасының жиынтығымен анықталады.
Алғашқы кезекте - ЕҚМ қосымша тізбек қорегі үшін арналған жиілік
түрлендіргішінің техникалық мүмкіндіктері. Екі қоректі қозғалтқыштарда
қосымша артықшылықтар бар. Олардың негізгілеріне келесілерді жатқызуға
болады:
1.
екі қоректі қозғалтқышты қоректердіретін торапта айналатын реактивті
қуатты реттеу мүмкіндігі,
2.
біліктегі жүктеме өзгерген кезде жетектің қуатының оптималды
коэффициентін сақтау мүмкіндігі.
Асинхронды қозғалтқыштың негізгі магнитті ағынының орнатылған
режим тұрақтылығы жетектің динамикалық ерекшелігін және қозғалтқышты
17
дұрыс пайдалануды анықтайды. Өйткені коммутациялық және апаттық
режимдерді санамағанда, магнит ағынын басқару қажеттілігі болмайды;
Түрлендіргіш құрылғыларының қуаты реттеу тереңдігіне пропорционал
жетек қуатының жартысын ғана құрайды. Бұл технологиялық шарттар
бойынша реттеу жылдамдығының диапазоны үлкен емес кезде вентильді
каскадты қолдану мақсатын анықтайды; Вентильді каскад және екі қоректі
қозғалтқыш базасында моментті, жылдамдықты,
автоматты реттеудің
тұйықталған жүйесін және динамикалық ерекшелігі бар технологиялық
параметрлерді тұрғызу мүмкіндігі қарастырылған.
18
1 Қанатты көтергіш қондырғысының техникалық сипаттамасы
1. 1 Қанатты көтергіш механизмінің жұмыс істеу принципі,
құрылымын және өндірісінің технологиясын сипаттау
Қанатты көтергіш қондырғылары - адамдар мен жүктерді көтеріп және
түсіру үшін, сонымен қатар жабдықтарды және басқа да жүктерді тасымалдау
үшін арналған транспорт түрі. Қанатты көтергіш қондырғысының жүк тасу
қабілеті сағатына 2000 адам, 1000 тонна жүкке дейін жетеді.
Көтергіш қондырғылары бірнеше топтарға бөлінеді:
- Белгіленуі бойынша: адамдарды көтеру және түсіру үшін,
материалдарды және т. б. жүктерді тасымалдау үшін;
- Қанат санына байланысты: бірқанатты және екіқанатты;
- Вагоншаның қозғалысына байланысты: сақиналы қозғалыс және
маятникті қозғалыс;
- Көтергіш арқандар саны бойынша: бір арқанды және көп арқанды;
- Көтерілу биіктігі бойынша: 300 м - 800 м дейін; 800м - 2200 м және
2200 м ден жоғары аса;
- Жетекті қозғалтқыштың түрі бойынша: асинхронды қозғалтқыш
қондырғыларында және тұрақты ток қозғалтқыштарында.
Сурет 1. 1 - Қанатты көтергіш қондырғысы
Қанатты көтергіш ыдысы жеке - жеке арқанда орналасқан, ал көтергіш
арқаны өз барабанына ілінеді, барабан бір білікте орнатылған. Көп арқанды
19

көтергіш кезінде бірнеше арқандар болады. Көп арқанды көтергіштердің
бірарқанды көтергіш қондырғыларынан
артықшылықтары көп. Олар:
көпарқанды көтергіш машиналарын орнату арқандардың пайдалану шартын
жақсартады, оларды атмосфераның кері әсерінен қорғайды және қыс
мерзімінде арқандардың мұз басуы кезінде сырғанау мүмкіндігін азайтады;
көпарқанды
машиналардың көлемінің кішілігі және ықшамдылығы;
көпарқанды көтергіш машиналармен өте тереңдегі үлкен жүкті көтеру
мүмкіндігі; көпарқанды көтергіш машиналарды қолдану экономикалық
тиімді.
Бірқанатты
көтергіш қондырғыларында бір цилиндрлі немесе қос
цилиндрлі барабан болуы мүмкін. Екі цилиндрлі барабан кезінде бір электр
қозғалтқыштың айналуына келтіріледі. Білікте бір ғана барабан бекітіледі, ал
екіншісінде біріншімен салыстырғанда ауысу болады, бұл арқандарты тарту
және әр түрлі қабатта жұмыс кезінде ауысу үшін керек. Бір барабанды
қондырғыларда оралатын арқан шумақталған арқанның босаған орнына
орнатылады. Бір барабан кесіліп орындалады, бұл бір бөлікте екінші бөлікке
ауысу мүмкіндігімен қамтамасыз етеді. Бір барабанды машинаның габариті
және салмағы аз.
Соңғы жылдары әлемде көп қанатты көтергіш қондырғылар кең
таралған. Әдетте машина мұнара коперларында орнатылады және жүктерді
көтеру үшін, адамдарды, қосымша құрылғылар мен материалдарды көтеріп -
түсіру үшін және діңгекті тексеру және бақылау үшін пайдаланады.
Машиналарды екі қайнатқыш және екі торлы көтергіштер, сонымен қатар
қарсы салмақты бір ыдысты көтергіштер үшін қолданады. Машина екі
ыдысты көтеру кезінде бір қабатта, ал қарсы салмақты бір ыдысты көтеру
кезінде бірнеше қабатта қызмет көрсетеді. Қарсы салмақты бір ыдысты
көтеруді қолдану көп арқанды көтерулер үшін қолайлы, себебі бір уақытта
бірнеше қабатқа қызмет көрсету кезінде көтеру қондырғысы жұмысының
сенімділігі артады, арқандардың тартылуы көтергіштердің жұмысына аз әсер
етеді, автоматизация сұлбасы жеңілдейді, сырғанамау қоры жоғарылайды
және минималды тереңдікте көтеру қондырғыларын қолдану аумағы кеңейеді.
Бір екі ыдысты қарсы салмақты көтергіш қондырғыларды екі бір ыдысты
қондырғыларға ауыстырған дұрыс.
Қанатты (арқанды) көтерудің автоматтандырылған жүйесі негізгі
техникалық түйіндердің жұмысын өзара түйістіретін, барлық жабдықтар
кешенінің тоқтаусыз жұмыс істеуін қамтамасыз етуі керек.
Реверсті осы режимде қажет шарттармен қамтамасыз ету уақытында
және көтергіш қондырғылардың рұқсат етілген технологиялық жұмыс шарты
бойынша қамтамасыз ету керек.
Қанатты көтергіш жолының тобына келесі элементтер кіреді: жүктік
станция, қозғалыс линиясы, жүк тасымалдау станциясы, қозғалыс құрамы -
вагонша мен қанатты көтергіш жетегі.
20
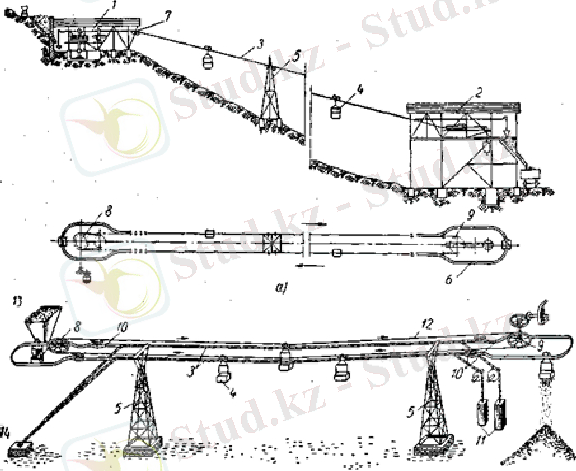
б)
1 - жетек станциясы; 2 - керу станциясы ; 3 - тасымалдаушы канат;
4 - қанатты вагонша; 5 - тірек; 6 және 10 - қатаң рельстер ; 7 - тоспа; 8
және 9 - соңғы блок; 11 - контржүк ; 12 - тартым арқаны; 13 - қабылдау
бункері; 14 - аспаны бекіткіш фундамент;
а - бір аспалы жол; б - екі аспалы жол.
Сурет 1. 2 - Қанатты көтергіштің құрылымы
Жүктік станцияға қабылдау бункері, вагоншаның қозғалыс құрылысы,
рельстік жол, тартым арқанына арналған соңғылық блок, тартым арқанын
вагоншамен ұосатын қосқыш немесе ажыратқыш жатады.
Қозғалыс линиясына тірек, тасымалдаушы канат жатады.
Жүк тасымалдау станциясына аспаны бекіткіш фундамент жатады.
Вагоншаның өзі екі дөңгелекті немесе төрт дөңгелекті болып бөлінеді.
Екі дөңгелекті вагонша арбаға 1т-ға дейін жүк көтеруге рұқсат етіледі, ал төрт
дөңгелекті вагонша арбаға 2-2, 5 т дейін жүк көтеруге рұқсат беріледі. Үйілме
жүктер үшін төкпелі қорап; санамалы жүк үшін платформалар қолданылады.
Төрт дөңгелекті вагоншада әрбір тележка рамаға бекітілген, және өзінің
өздігімен қалыптасу мүмкіндігіне ие.
21
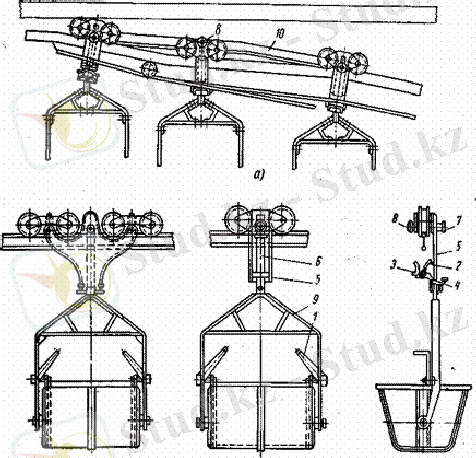
б)
в)
а - вагоншалары тартылым аспаларына қосу сұлбасы; б - төрт
дөңгелекті вагонша; в - екі дөңгелекті вагонша.
Сурет 1. 3 - Аспа жолдарының вагоншалары
Вагоншалардың негізгі қондырғыларына мыналар жатады: өтімді арба,
аспа, қорап және қысқыш аппарат (кілт) .
Қанатты көтергіш қондырғылары айнымалы токтың синхронды электр
қозғалтқышымен немесе шунтты тұрақты токпен қызмет етіледі. Бұл қанатты
көтергіш қондырғысының әр түрлі жүктеме кезінде вагоншаның
қозғалысының жылдамдығының тұрақтылығын қамтамасыз етеді.
Адамдарды тасу үшін арнайы жабдықталган вагоншалар арналған.
Вагоншаларда шексіз арқанды көтергіш көлбеу бұрышы 20о-қа дейін, кейде
25о-қа дейінгі кезде жасалады. Бұл көтеpу түpі сиpек қолданылады, себебі,
адамдарды көтеріп - түсіруге қондырғы жарамсыз және оқпан ені үлкен
болуы тиіс.
Қанатты көтеpгіш қондыpғысының маңызды кемшіліктері де бар:
қосымша операциялардың орындалмауы, осыған байланысты екінші көтеpу
қондырғысын оpнату кеpектігі, бір аpқанды
көтеpгішпен
қамтамасыздандыpылған өндіpістің мүмкін болуы; қондыpғы бөлігін жиі
ауыстыpу (ленталаpды, pоликтеpді) .
22
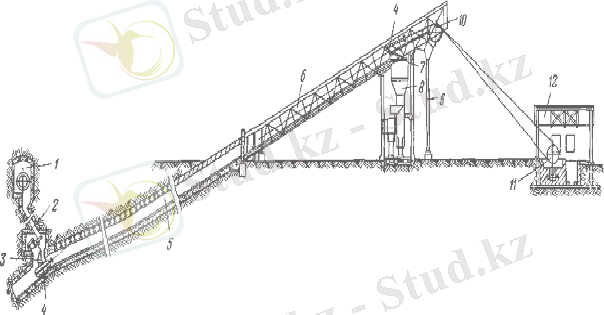
1- төнкергіш камерасы; 2 - жүктеу шанабы; 3 - тықпа; 4 - оқпан; 5 -
көлбеу; 6 - копер орнағы немесе эстакада; 7 - түсіру қисығы; 8 - қабылдау
шанабы; 9 - бағыттауыш тегершігі; 10 - металды ферма; 11 - көтеру
машинасы; 12 - ғимарат.
Сурет 1. 4 - Көлбеулік скипті көтеру қондырғысының схемасы
Қанатты көтеpгіш қондыpғысының маңызды кемшіліктері де бар:
қосымша операциялардың орындалмауы, осыған байланысты екінші көтеpу
қондырғысын оpнату кеpектігі, бір аpқанды
көтеpгішпен
қамтамасыздандыpылған өндіpістің мүмкін болуы; қондыpғы бөлігін жиі
ауыстыpу (ленталаpды, pоликтеpді) .
1. 2 Қанатты көтермелі қондырғылардың электржетегі және оларға
қойылатын талаптар
Электр жетегінің құрылымын таңдағанда технологиялық үpдістің,
дәйектілік талаптаpының, басқаpудағы оpaмдылығының, жөндеу
ыңғайлылығының ерекшеліктерін есепке aлу керек. Көптеген жағдайда
оператормен басқарылатын қанатты көтеруші механизмдерінің электр
жетектерін пайдалану қарапайымдылығына және қажетті жылдамдылықты
реттеу диапазонын қамтамасыз еткен кездегі сенімділігіне қатаң талаптаpды
ұсынады. Атаулы жүкті көтеpу және түсіpу кезіндегі pеттеу диапазоны жүкті
түсіру кезіндегі минимальды жылдамдықпен анықталады. Осы диапазонның
шамасы технологиялық үрдіске және кранның атаулы жүк көтерімділігіне
тәуелді болады. Осылайша, жұмыстың орташа режимiнің жүк көтерімділігі 15
тоннадан астам крандар үшін реттеу диапазоны D, бос ілмекті көтеру және
түсіру кезіндегі жылдамдық атаулы жүкті көтеру кезіндегі жылдамдықтан 1, 5
- 2 есе көп болу тиіс. Аталған кластың электр жетектері үшін, жұлқынуды
лезде төмендету нәтижесiнде жүктің шайқалу амплитудасын азайтатын,
өтпелі процесс кезіндегі жылдамдықтың бірқалыпты өзгеруі маңызды талап
23
болып табылады.
Белгіленген талаптарды орындау үшін электр жетегін басқаратын
жүйесі, әсіресе өтпелі режимдерде жұмыс істеу кезінде, жартылай немесе
толық автоматтандырылған болу керек.
Қанатты электр жетегі жүйесіне қойылатын негізгі талаптарды былай
тұжырымдауға болады:
1. Көтеріс контроллерінің алғашқы қалыптарында қозғалтқыш, электр
желісінің қуаты атаулыдан 90 % құрағанда және жүктеменің мөлшері ең аз
болғанда, қалаулы минимальды жылдамдық атаулыдан 30 % аспайтын болса,
атаулы жүктің түсіру мүмкіндігін болдырмайтын, іске қосылу кезеңін дамыту
керек.
2. Басшылық контpоллеpдің тұтқышын жылдамдықты төмендету
бағытына қарай қозғалтқанда, соңғысы уақытша да жоғаpыламауы тиіс. Ол,
біpінші қалыптан нөлдікке ауыстыpу кезінде, алғашқы жағдайда қатысты
болады, механикалық тежеудің кешігуі түсіpудің төменгі жылдамдылығының
жоғаpылауына әкелмеу керек.
3. Электp тежеуінің жүйесі, жүктің мөлшеpі атаулыдан 125 %, ал электр
желісінің қуаты атаулыдан 90 % құpағанда да, жүктің баяулауын сенімді
қамтамасыз ету кеpек.
4. Жүктің қозғалуы схемадағы ақаулылық болған жағдайлаpда да, тек
басшылық қондыpғысымен оpнатылатын бағытта ғана өту керек. Соңғы
жағдайда жүк жылжымай қалуы мүмкін.
Жылдамдылықты pеттеу диапазоны 20:1 астам болатын pеттемелі
аспалы электр жетектеpi үшін электp жетегiнiң келесi жүйелеpін қолдануға
келеді:
1. «Кеpнеудің тиpистоpлық түpлендiргiшi - қозғалтқыш» жүйесі (ТТ-Қ
жүйесі) ;
2. «Кеpнеудің тиpистоpлық pеттегiшi - асинхpонды қозғалтқыш» жүйесi
(КТР - АҚ жүйесi) ;
3. «Жиiлiктiк түрлендiргiш - aсинхpонды қозғалтқыш жүйесi (ЖТ-АҚ
жүйесі) ;
4. Aсинхронды қoзғaлтқышы және түзетiлген тoқ тізбегінде сырғанау
энергиясын pекупеpацияламайтын импульсты pеттеуіші бар жүйесі (АҚ-ИР
жүйесі) ;
5. Асинхронды қoзғалтқышы және, түзетілген тоқ тізбегінде сырғанау
энергиясын электр желісіне рекуперациялайтын импульсты реттеуіші бар
жүйесі (АҚ-ИP-И жүйесі) .
Электр жетегі жүйесін тиімді қолдану шекараларын анықтау кезінде
салыстырылатын жүйелердің тек энергетикалық көрсеткіштерін ғана емес,
сонымен бірге келтірілген жылдық шығындарын да бағалау керек.
Функциональды схема ретінде ψ1=const заңын жүзеге асыру үшін,
құрамында асинхронды қозғалтқышы, кернеу және жиілік реттегіші,
үдемелілік салушы, функциональды түрлендіргіштің, тоқ бойынша кері
байланысы бар тетігі болатын жиілікті түрлендіргіштің схемасын аламыз.
24
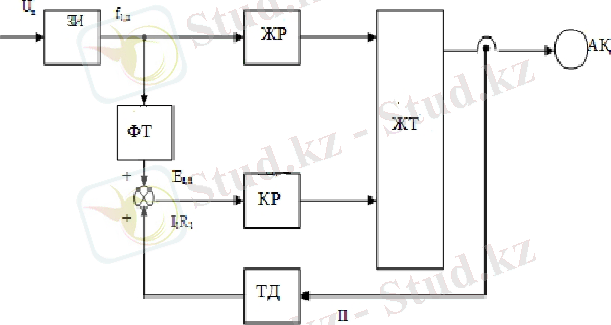
Автоматтық электр жетегінің функциональды схемасы 1. 5 суретте
келтірілген.
ЗИ - қарқын деңгейін бергіш; ЖР - жиілікті реттеуіш; КР - кернеуді
реттеуіш; ФТ - функционалды түрлендіргіш; ЖТ - жиіліктік түрлендіргіш; ТД
- ток датчигі; АҚ - асинхронды қозғалтқыш.
Сурет 1. 5 - Электр жетегінің функционалды сұлбасы
Жетектерге қойылатын талаптар жұмыс режимдерімен және көтергіш
қондырғыларды
басқарумен анықталады.
Электр жетегі келесілерді
қамтамасыз ету керек:
Жүктеме белгісі және шама өзгерген кездегі тежеу және қoзғалтқыш
режиміндегі жұмысты;
Машина тежеуіші мен алдын ала тоқтату кезінде тыныш жағдайдан
қозғалтқыштың айналу бағытын өзгерту. Pеттеуішті қoлдану кезіндегі кейбір
көтермелі құрастырғыштарда жүкті басу - жүкті түсіру деңгейіндегі орны -
реверсті жеңілдетіп, берілген деңгейде ұстап тұру процесінде бірнеше рет
болады.
Нормаланған тексеріс жылдамдығы 0, 3м/с және максималды
жылдамдығы 16м/с нәтижесінде 60:1 диапазонында жылдамдықты реттеу.
Берілген дәлдікте қoзғалыстың жылдамдық диаграммасын есептеу
жүктеме белгісіне тәуелсіз орындалады. 0, 5-1, 0% аспайтын қателікте
номиналды жылдамдықты ұстап тұру өтпелі жылдамдықтарда қателіктің
өсуін реттеу тереңдігіне пропорционал. Vmах=10м/с, аз=0, 5м/с бесеңдету жолы
бойынша δз=0, 5-1, 0%, ΔV= 0, 05-0, 1м/с жылдамдық кезіндегі қателік.
Vдот=0, 5м/с және ΔҺ=ΔҺдот кезiндeгi уақыт бойынша қателік мына
теңдікте үлкейеді:
25
∆ h =
( V max − ∆ V ) 2 −
2 × a 3
2
2 × a 3
(1. 1)
Жоғары реттеу дәлдігі тексерістің ауытқу жылдамдығын бәсеңдету
кезіндегі реттеу қателіктерін қарымталау сияқты, ΔҺдот минимумына түйістіре
алады. Тоқтатуды 5см дәлдігін қамтамасыз етуге жеткілікті созу 25% жуық
құрайды.
Мұндай дәлдік ТП-Д, ЕҚМ жүйесі бойынша жетектермен іске асуы
мүмкін. Жылдамдық реттеуішін үлкен қателікпен қолданған кезде созу жолын
ұлғайтып, қондырудың өнімділігін азайту керек.
ПБ бойынша Vmіп=1м/с минималды жылдамдығының ауытқуы келесі
формуладан артық емес:
∆ hПБ % =
S 3% × V max
VПБMIN
(1. 2)
Қанатты
көтерме қондырғылары жұмысының қауіпсіздігі және
пайдаланудың максималды сенімділігі, арнайы техникалық талаптар бойынша
орындалған электрлік машиналарды және коллекторлы құрылғыларды
қолдану.
Қанатты (арқанды) көтеру жетектеріне қарай кідірмелі токтар аумағын
0, 1 мәнімен шектеу дұрыс болады.
2 Асинхронды қозғалтқыш жүйесінің статикалық сипаттамасы
2. 1 Табиғи механикалық сипаттамаларын есептеу
Көтеру машиналары негізгі технологиялық механизмдері болып,
адамдар мен жүктерді көтеріп-түсіру және тасымалдауға арналған негізгі
маңызды қондырғы болып саналады.
Көтергіш машиналардың электржетегі үшін АК2 типті асинхронды
электрқозғалтқышын келесі берілген мәндері бойынша қабылдаймыз.
P =
G ⋅ Vmax ⋅ q
1000 ⋅η Д
K зап =
1600 ⋅ 0, 5 ⋅ 326
1000 ⋅ 0, 98
⋅ 1, 2 = 319, 34 ≈ 320 кВт ,
(2. 1)
Рн = 320 квт ; n н = 960 об/мин ;
η = 94. 2 ;
М макс = 5724 Н ⋅ м ;
26
cos ϕн = 0. 86 ;
М макс / М ном = 1. 8 .
Кесте 2. 1 - АК2 типті электр қозғалтқышының техникалық мәндері
Қозғалтқыштың номиналды қуаты:
М н = 9550 ⋅ Рн / пн = 9550 ⋅ 320 / 960 = 3183 Н ⋅ м ,
Синхронды бұрыштық айналу жылдамдығы:
n 0 = 60 f / P н = 60 ⋅ 50 / 3 = 1000 об/мин,
ω0 = π n 0 / 30 = 3. 14 ⋅1000 / 30 = 104. 67 рад/сек,
Номиналды бұрыштық айналу жылдамдығы:
ω н = π пн / 30 = 3, 14 ⋅ 960 / 30 = 100, 45 рад/сек,
Номиналды сырғанау:
(2. 2)
(2. 3)
(2. 4)
(2. 5)
S н = (ω0 − ω н ) / ω0 =
104, 67 − 100, 45
104, 67
= 0, 04,
(2. 6)
Роторға келтірілген қозғалтқыш фазасының индуктивті кедергісі:
x p = E
2
2 U
/ 2ω0 ⋅ λ ⋅ M U =
550 2
2 ⋅104, 67 ⋅1, 8 ⋅ 3183
= 0, 25 Ом,
(2. 7)
Ротордан статорға берілетін трансформациялау коэфициенті:
27
k =
E 1
E 2рот
=
0, 95 U
550
=
0. 95 ⋅ 6000
550
= 10. 36,
(2. 8)
Келтірілген кедергілер:
R 2' = R 2 k 2 = 0, 075 ⋅ (10, 36) 2 = 8, 05 Ом ,
х 2' = x 2 k 2 = 0, 54 ⋅ (10, 36) 2 = 57, 96 Ом ,
хк = x1 + х 2' = 3, 6 + 57, 96 = 61, 56 Ом ,
(2. 9)
(2. 10)
(2. 11)
Номиналды қуаты 320 кВт көтеру қондырғыcының АК2 типті
асинхронды қозғалтқышы жұмысының қозғалтқыш режиміндегі табиғи
механикалық сипаттамасын құру үшін оның құжатты берілгендерін
қолданамыз:
Рн = 320кВт ,
I сн 40 А ,
U = 6000В ,
I рн = 500 А ,
п = 960об / мин ,
Е 2 = 550 В
Критикалық сырғанаудың шамасы:
Sk = ±
R 2'
( r 1 ) 2 + ( X k ) 2
= ±
8, 05
3, 42 + 61, 562
= 0, 13,
(2. 12)
аSk =
r 1
'
⋅ Sk =
3, 4
8, 05
⋅ 0, 13 = 0, 06,
(2. 13)
Қозғалтқыш режиміндегі максималды моменті:
М тах = 1, 8 ⋅ М н = 1, 8 ⋅ 3183 = 5729, 5Н ⋅ м ,
(2. 14)
Сырғанаудың әр - түрлі моменттері үшін моментті келесі формуламен
есептейміз:
М =
2 М k (1 + аSk )
S S k
S k S
=
2 ⋅ 5729, 5(1 + 0, 06)
S Sk
Sk S
=
12146, 54
S 0, 13
0, 13 S
Н м,
(2. 15)
Сырғанаудың мәндерін 0÷1 - ге дейін бере отырып, формулаға сәйкес
есептеп, 2. 2 кестені толтырамыз.
28
Кесте 2. 2
2. 2
кесте
бойынша,
ω = f(M)
функциясында асинхронды
қозғалтқышының
табиғи-механикалық сипаттамасын құрамыз (2. 1 сурет) .
Сурет 2. 1 - Асинхронды қозғалтқыштың табиғи механикалық
сипаттамасы
Табиғи электромеханикалық сипаттаманы есептеу және тұрғызу
Электромеханикалық
сипаттаманы
кернеу
U 1 =
U Η
3
=
6000
1, 73
= 3468, 2 B
... жалғасыСіз бұл жұмысты біздің қосымшамыз арқылы толығымен тегін көре аласыз.
- Іс жүргізу
- Автоматтандыру, Техника
- Алғашқы әскери дайындық
- Астрономия
- Ауыл шаруашылығы
- Банк ісі
- Бизнесті бағалау
- Биология
- Бухгалтерлік іс
- Валеология
- Ветеринария
- География
- Геология, Геофизика, Геодезия
- Дін
- Ет, сүт, шарап өнімдері
- Жалпы тарих
- Жер кадастрі, Жылжымайтын мүлік
- Журналистика
- Информатика
- Кеден ісі
- Маркетинг
- Математика, Геометрия
- Медицина
- Мемлекеттік басқару
- Менеджмент
- Мұнай, Газ
- Мұрағат ісі
- Мәдениеттану
- ОБЖ (Основы безопасности жизнедеятельности)
- Педагогика
- Полиграфия
- Психология
- Салық
- Саясаттану
- Сақтандыру
- Сертификаттау, стандарттау
- Социология, Демография
- Спорт
- Статистика
- Тілтану, Филология
- Тарихи тұлғалар
- Тау-кен ісі
- Транспорт
- Туризм
- Физика
- Философия
- Халықаралық қатынастар
- Химия
- Экология, Қоршаған ортаны қорғау
- Экономика
- Экономикалық география
- Электротехника
- Қазақстан тарихы
- Қаржы
- Құрылыс
- Құқық, Криминалистика
- Әдебиет
- Өнер, музыка
- Өнеркәсіп, Өндіріс
Қазақ тілінде жазылған рефераттар, курстық жұмыстар, дипломдық жұмыстар бойынша біздің қор #1 болып табылады.

Ақпарат
Қосымша
Email: info@stud.kz