Жиілікті түрлендіргіш-асинхронды қозғалтқыш жүйесі негізінде жолаушы лифтінің автоматтандырылған электр жетегін жобалау және есептеу

Аңдатпа
Дипломдық жобада жолаушы лифтінің автоматтандырыдған электр
жетегі жасалынған. Лифттерде қолданылатын әртүрлі электр жетектерге
талдау жасалынып, ең тиімді электр жетегі ретінде жиілікті түрлендіргіш -
асинхронды қозғалтқышы жүйесі таңдалды. Жетектің ЖТ - АҚ элементтері
есептеулері орындалған.
Негізгі бөлімде лифт жетегінің электр
қондырғыларының таңдауы және есептеулері келтірілген, статикалық және
динамикалық сипаттамалары есептелген.
Өміртіршілік бөлімінде еңбек шарттары талданып,
электрқұрылғылардың шу денгейі анықталып, ауа алмасуға есеп жүргізіліп,
жұмыс өндірісіндегі қауіпсіздік техникасының мәселелері қарастырылған.
Экономикалық бөлімде жылдам жолаушы лифтінің автоматты электр
жетегінің аса маңызды экономикалық көрсеткіштерінің жұмысын анықтау
есептеулері келтірілген.
Аннотация
В дипломном проекте разрабатывается автоматизированный
электропривод пассажирского лифта. В специальной части произведен расчет
и выбор основного электрооборудования привода лифта, расчет механических
и динамических характеристик. Выполнен расчет элементов системы привода
преобразователь частоты - асинхронный двигатель (ПЧ - АД) .
В разделе безопасности жизнедеятельности производится анализ
условий труда, определяется шум электроприборов, расчитывается задача
воздухообмена и техника безопасности в производственной работе.
В экономической части проекта произведен расчет по определению
наиболее важных экономических показателей АЭП скоростного
пассажирского лифта.
Мазмұны
Кіріспе
1 Жобалау нысанының технологиялық сұлбасы және жылдам жеделсаты
жұмысының технологиясы
1. 1 Жеделсаты қондырғыларының сипаттамасы
1. 2 Электр жетектер жүйесіне қойылатын талаптар
1. 3 Электр жетектер жүйесін сапалы таңдау
2 Жеделсаты қондырғыларының күштік жабдықтарын таңдау
2. 1 Жеделсатының электр қозғалтқыштарының қуатын таңдау
2. 2 Жүктеме диаграмасын және тахограмманы тұрғызу
2. 3 Жиілікті түрлендіргішті таңдау
2. 4 Жылдам жеделсатының тежеу құрылғылары
3 Жылдам жеделсаты жұмысының динамикалық режимін талдау
3. 1 Іске қосылу кезіндегі алшақ салынған жүйенің өтпелі процестерін зерттеу
3. 2 Тежеу кезіндегі электр жетектегі алшақ салынған жүйенің өтпелі
процестерін зерттеу
3. 3 Тежеу және іске қосудағы электр жетектің тұйықталған жүйесінің өтпелі
процестерін зерттеу
4. Өміртіршілік қауіпсіздігі бөлімі
4. 1 Лифт жүйесін басқару мекемесіндегі құрылғылардың адамға физикалық
және психологиялық жүктемесін бағалау
4. 2 Лифт жүйесін басқару мекемесіндегі жұмыс бөлмесінде ауа алмасу
жүйесіне есеп жүргізу
4. 3 Электр құрылғысының шу деңгейін бағалау және есептеу
5 Экономикалық тиімділікті есептеу
5. 1 Есептеуге қажетті бастапқы деректер
5. 2 Жалақыға кететін шығындарды есептеу
5. 3 Электр энергиясына шығынды есептеу
5. 4 Капиталды салымдарды есептеу
5. 5 Жобаның экономикалық тиімділігі
Қорытынды
Қолданылған әдебиеттер тізімі
Кіріспе
Қазақстанда тұрғын үй, әкімшілік және мәдени-тұрмыстық ғимараттар
саны жылдан жылға көбеюде. Заманауи құрылыс компанияларының негізгі
мақсаты тұрғызылатын ғимараттың шаршы метрін ұлғайту ғана емес,
сонымен қатар сапасын, жайлылығын және баспана шарттарын жақсарту
болып табылады.
Өндірістік және әкімшілік ғимараттарында, тұрғын үйлерде
қолданылатын барлық көтергіштердің ішіндегі ең кең тарағаны бұл -
жеделсаты.
Жеделсатылар электр жетектерімен жабдықталады, ол қажет жүрістің
жүк көтерілімділігімен және қабат деңгейіндегі аялдаманың дәлдігімен
қамтамасыз етеді. Қолайлылық өтпелі режимдерде пайда болатын
жылдамдықтың шамаларына және жеделсаты кабинансының ақырындауына
байланысты.
Жеделсатылар өзінің мақсаттары бойынша жиі тоқтаулармен іске
қосылулар сипаттамасы тән, циклді әрекеттегі механизмдер қатарына жатады.
Жеделсатылардың электр жетектері сенімді, тиімді және дыбыссыз болу
керек.
Жеделсатылар үшін тоқтау және жүру кезінде қажет бір
қалыптылығына, дайындалу құнына және электр жетектерінң
пайдаланылуына байланысты электр жетектерінің әр түрлі жүйелері
қолданылады. Жеделсатылар үшін қысқа тұйықталған роторы бар асинхронды
электр қозғалтқыштармен айнымалы токтың электр жетектері кеңінен
таралған. АҚ кеңінен таралуы электр қозғалтқыштардың басқа түрлерімен
салыстырғанда құрылымының қарапайымдылығымен, сенімділігімен және
құнының арзандығымен түсіндіріледі.
Жеделсатылар үшін бір жақты және екі жақты қысқа тұйықталған
асинхронды қозғалтқыштары бар айнымалы токтың элетр жетектері мен
кернеуді басқарылатын тиристорлы түрлендіргіштері бар тұрақты токтың
электр жетектері қолданылады. Ақырын жүретін жеделсатылар үшін қысқа
тұйықталған асинхронды қозғалтқышы бар элекр жетектерінің қарапайым
сұлбасы қолданылады. Бұл жағдайда жылдамдықты шектеу қозғалтқыштың
білігінде орнтылатын қосымша маховиктер мен иненрция моментімен арнайы
жеделсаталы қозғалтқыштарды қолдану есебімен, жеделсаты жүк арбасының
электр жетегінің инерция моментін әдейі жоғарылату жолымен орындалады.
Тез жүретін жеделсатылар үшін қозғалтқыштардың төмен жылдамдықта
жұмыс істеу мүмкіндігін қамтамасыз ететін қосымша механикалық сипаттама
қажет. Бұл сипаттама қажет аялдаманың дәлдігін қамтамасыз ету жән
кабинаның жылдамдығын қозғалту үшін қажет. Жылдамдығы 1, 4 м/с
жеделсатылары үшін кең таралған екі жылдамдықты асинхронды
қозғалтқыштары және контактілі басқаруы бар электр жетектері болып
табылады.
Тиристорлы түрлендіргіштерден басқарылатын тәуелсіз орамалары бар
екі жылдамдықты асинхронды қозғалтқыштарды қолдану жеделсатылы
кабинаның қозғалыс жылдамдығын 2 м/с дейін жоғарылатуға мүмкіндік
береді. Электр жетектер жүйесіндегі тездету мен жұлқынуды шектеу
оптималды тахограмма қозғалысын қалыптастыру жолымен жылдамдықты
реттеудің бір контурлы тұйықталған жүйесімен жүзеге асады.
Қазіргі уақытта жеделсаты қондырғыларының электр жетектері қысқа
тұйықталған роторы бар екі жақты асинронды қозғалтқыштан, редуктордан,
тежеу құрылғыларынын және басқарудың релелік-контакторлі сұлбасынан
тұрады.
Бұрын жылдамдықты жделсатыларды жобалау кезінде «Г - Қ» жүйесі
немесе «ТТ - Қ» жүйесі қолданылған. Электр жетектің «Г - Қ» жүйесін
пайдалану кезінде үш қозғалтқышқа қызмет көрсетілген, оладың екеуі трақты
токта жұмыс жасайды. Тұрақты ток машиналарын таңдау кезіндегі
кемшіліктер - бұл щеткалы-коллекторлы аппарат, жетектің бұл түрін қолдану
кезінде ұиыншылықтар туындайды. «ТТ - Қ» жүйесінің артықшылығы іске
қосылу мен тежеудің бір қалыптылығнда. «ТТ - Қ» жүйесінде іске асатын
электр жетектері жеделсатылардың әр түрі үшін қолданылады: ақырын
жүретіннен бастап тез жүретіндерге дейін. Жеделсатыны жобалау кезінде
аялдаманың жоғары дәлдігі қажет емес. Бірақ кемшілігі «Г - Қ» жүйесіндегі
сияқты щеткалы - коллекторлы аппаратта. Сондықтан бұл жобада «ЖТ - АҚ»
жүйесі қарастырылады.
Қазіргі уақытта электр жетектің жиілікті түрлендіргіш - асинхронды
қозғалтқыш (ЖТ - АҚ) жүйесіне көп көңіл өлінуде.
Жиілікті түрлендіргішті қолдану тежеудің және екпіннің бір қалыпты
іске қосылуына мүмкіндік береді. Қысқа тұйықталған роторы бар асинхронды
қозғалтқышты қолдану коммутация түйіндерінің болуын жояды, бұл
жеделсатының электр жетегін пайдалану мерзімін жоғарылатыды.
Бұл дипломдық жобаның мақсаты жылдамдықты жеделсатылардың
жиілікті - реттеуіш лектр жетектерін ЖТ - АҚ жүйесімен есептеу және өңдеу
болып табылады. Жобада элек жетектерінің динамикалық және статикалық
сипаттамалары, электр жетектерінің математикалық моделі қарастырылған.
1 Жобалау нысанының технологиялық сұлбасы және жылдам
жеделсаты жұмысының технологиясы
1. 1.
Жеделсаты қондырғыларының сипаттамасы
Жеделсаты бағыттаушы бойынша тік қозғалыстағы көтергіштен тұрады.
Есіктері жабылатын, жабдықталған шахтада орнатылады.
Жеделсатылар орындалу мақсаты бойынша жолаушы, жүк жолаушы,
сырқаттық және жүк тасымалдайтын болып бөлінеді. Жолаушы жеделсатысы
ғимараттағы жолаушыларды бір деңгейден екіншіге тасу үшін арналған.
Жеделсатыларды кабиналардың қозғалыс жылдамдығына қарай келесі
түрге бөледі:
- ақырын жүретін;
- тез жүретін;
- жылдамдықты;
- жоғары жылдамдықты.
Жеделсатылардың негізгі жабдықтарына келесілер жатады:
- кабина;
- ауырлық (қарсы салмақ) ;
- жүкарба,
- қозғалтқыш;
- электромехникалық тежеу құрылғылары;
- шахта есіктері;
- басқару аппараттары.
Жабдықтар.
Жеделсатының барлық жабдықтары шахтада, оның үстіндегі және
астындағы ғимараттарда орнатылады.
Шахтаның алдыңғы керегесінде биіктігі бойынша қабаттар деңгейінде
шахтаның есіктерімен жабылған есіктер қатары болады. Шахтаның есіктері
екіашпалы және жылжымалы болады. Жабық күйінде әр жарма шахтаның
сыртынан жылжыуға мүмкіндік бермейтіндей, автоматты құлпымен
жабылады. Автоматты құлыптар жұмысы
Автоматты құлпылардың жұмысы электрлік блоктаушы
ажыратқыштармен бақыланады. Шахтадағы есіктердің саны жеделсаты
аялдамаларының санына сәйкес болады. Шахтада барлық биіктік бойында
кабиналардың қозғалысы үшін табалы бағыттаушылар және ауырлықтың
қозғалысы үшін бұрыштық бғыттаушылар орнатылған. Шұңқыр шахтаның
төменгі бөлігінде болады. Шұңқыр шахтаның жалғасы болып табылады.
Шахтаның шұңқыр кабинаның астында буферлі құрылғлар, ауырлық және
жылдамдықты шектеуіш арқанының тарту құрылғылары орнатылған.
Серіппелі буферлер қатты соққыдан қорғайды. Егер кабина қандай да бір
себеппен шеткі биіктік деңгейінен немесе шеткі төменгі аялдамалардан өтсе.
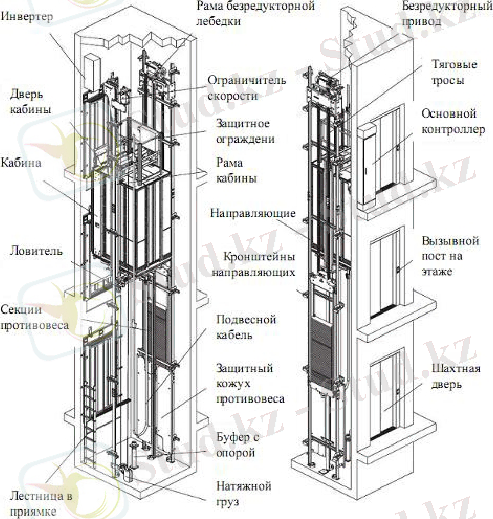
1. 1 сурет - Жолаушы жеделсатысының сұлбасы
Жолаушылар мен жүкті тасу шахтадағы бағыттаушы бойынша
қозғлатын жеделсатының кабинасында орындалады. Шахтадағы кабинаның
белгіленген жағдайы төрт сырғымалы тоспалардың көмегімен сақталады,
кабина қозғалыс
кезінде бағыттаушы бойынша жылжиды. Тоспалар
майланатын аппараттармен жабдықталған. Кабинада жылжымалы еден
болады. Кабинада салмағы 15 кг аса жүк немесе жолаушы болғанда еденнің
жылжымалы бөлігі түсіріледі, ол еден астында орнатылған контактті жүйеге
әсер етеді, ол арқылы кабинадағы жүктің немесе жолаушыны бақылауға қол
жеткізіледі. Сонымен қатар, кабина еденінің астында кабинаның жүктелуін
және артық жүктелу деңгейін бақылайтын құрылғы орнатылған. Кабина
қысқыш ұстағыштармен жабдықталған. Ұстағыштардың мақсаты - егер
кандай да бір себептермен кабинаның қозғалыс жылдамдығы рұқсат
етілгеннен асып кетсе, шахтаның бағыттаушыларында кабинаны сенімді ұстау
және тоқтату үшін арналған. Ұстағыштар жылдамдықы шектеуішті және
ұстағыштың қосылу механизімінің тұтқышын қосатын, арқан құралдары
бойынша жылдамдықты шектеумен іске қосылады. Кабинада екі жарма есік
болады. Олар кабинаның қозғалысы кезінде пайдалану қауіпсіздігінен
кепілдік береді.
Дәл осылай басқару қалқанындағы кабинадан тыс жатқан басқару
аппараттары және құрылғысы бар сигнализациялар байланысы жүзеге асады.
Жеделсатыларға әртүрлі зақымдану мен апаттар кездерінде арнайы
механикалық құрылғыларды қолдануды міндеттейтін қауіпсіздікке қатысты
жоғары талаптар қойылады:
- қозғалтқыш білігінде қалыпты жұмыс кезінде немесе апатты режимде
қозғалтқыштан кернеуді түсіру кезіндегі жетекті тежейтін
электромеханикалық жабдықтар;
- кабина шахтасының еденіндегі соққыдан және қарсы салмақтан
сақтандыру үшін ақырғы сөндіргіштертің қарсыласуында кабина мен қарсы
салмақ отыратын майлы буферлер;
-
арқан үзілгенде немесе қабина қозғалысы рұқсат етілген
жылдамдықтан асқан кезде іске қосылатын ұстағышар. Кабина рұқсат етілген
жылдамдықтан асқанда шектеуіш сыналанады, арқанды тоқтатады, бұл
ұстағыштардың іске қосылуына әкеледі, ол кабинаны бағыттаушыға қысады.
Жеделсаты қозғалтқышы жұмысының ерекшелігі оның білігіндегі
жүктемені өзгерту болып табылады. Жүйе жұмысының келесі шекті
нұсқалары мүмкін: толық жүктелген кабинаны көтеру - бұл кезде жетекті
қозғалтқыш қозғалтқышты режимде жұмыс істейді, толық жүктелген
кабинаны түсіру - жұмыс тежеу кезінде түсіру режимінде орындалады, бос
кабинаны көтру - қарсы салмақтың пекуперотивті тежелуі, бос кабинаны
үсіру - кабинаның күштік түсуі (қарсы салмақтың көтерілуі) . Бұл режимдер
жетектен төрт шаршыдағы жұмысты қамтамасыз етеді.
Есіктердің ашылуы кабинаның төбесінде орнатылған есік жетектерімен,
жабылу - серіппемен іске асады. Кабина аялдама деңгейінде болған кезде
кабинаның есігі шахта есіктерімен әрекетеседі. Мұнымен кабина және шахта
есіктерінің жұмысы бірге орындалады. Қақпа есіктері жабылған кезде шахта
есіктері қақпалардың салмағының әсерінен қиғаш сызықтар бойынша
қозғалады.
Ауырлық (қарсы салмақ) құрастырма жүкермен толтырылан металл
рамадан тұрады. Шахтада қарсы салмақ өзінің бағыттаушысы бойынша
қозғалады. Қарсы салмақтың белгіленген жағдайы төрт сырғымалы
топалардың көмегімен сақталады, қрсы салмақ қозғалуы кезінде бағыттаушы
бойынша сырғиды. Тоспалар майлау аппараттарымен жабдықталған. Қарсы
салмақтың қозғалысы кабина қозғалысына қарама-қайшы болады.
Қарсы салмақты қолдану жүкарба электр қозғалтқышының қуатын
төмендетуге мүмкіндік береді.
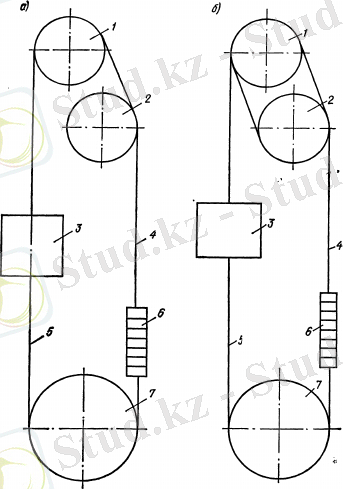
Заманауи жоғары жылдамдықты жеделсатыларда қарсы салмағы және
теңдестірілген арқандары бар көтеру жүйесі бар. Заманауи жоғары
жылдамдықты жеделсатыларда көтеру биіктігі 200-300 м кезде арқан
жүргізгіш тегершіктердің қоршау бұрышы 360° тең кинематикалы сұлбалар
қолданылады (1. 2,
а, б суретті қара) . Алдағы жылдарда жеделсаты
техникасының даму үрдісі келесідей: көтерудің жоғары биіктігі үшін жоғары
жылдамдықты жеделатыларда қарсы салмақ, арқан жүргізгіш тегершіктердің
қоршау бұрышы 360° тең теңестірілген арқандар болмақ.
а - тік ілмесі және қоршау бұрышы 180° кем емес тарту арқандарының арқан
өткізуші тегершіктері бар сұлба; б - тік ілмесі және қоршау бұрышы 360°
тарту арқандарының арқан өткізуші тегершіктері бар(екі қабат қоршау) сұлба;
1- арқан өткізуші тегершік; 2-бұрып апаратын оқшаулағыш; 3-кабина; 4-тарту
арқаны; 5-теңестіретін арқан; 6-қарсы салмақ; 7-керіп кигізілетін оқшаулағыш
1. 2 Сурет - Жоғары жылдамдықты жеделсатыларды сипаттаушы
кинематикалық сұлбалар
Жеделсатылы қондырғылар іске қосылу-тежеу режимдерінде жұмыс
жасайтын элекр жетектердің динамикалық сипаттамасына жоғары талаптар
қоятын механизмдердің типті мысалы болып табылады.
Жолаушы жеделсатылардың электр жабдықтарын келесі талаптар
қойылады:
- жұмыстағы сенімділік;
- жолаушыларға қызмет көрсету қауіпсіздігімен қамтамасыз ету;
- белгіленген өнімділікпен қамтамасыз ету;
- қабат деңгейіндегі белгіленген аялдаманың дәлдігімен қамтамасыз
ету;
- ұйғарынды шуыл мен дірілдің деңгейін қамтамасыз ету;
- жеделсаты тоқтау немесе іске қосылу кезінде кабинаның ұйғарынды
жеделдетілуі;
- жылдамдықтың рұқсат етілген жұлқынысы;
- пайдалану мен қызмет көретудің қолайлылығы және
қарапайымдылығы;
- тежеу және іске қосылу процестерінің бір қалыпты ауысуын
қамтамасыз ету;
- жылдамдықты ревизиялы төмендеуінің болуы;
- жеделсатылы жүкарба қалыпты тұйықталған түрдегі автоматты
әрекет ететін тежеумен жабдықталуы керек.
.
1. 2 Электр жетектер жүйесіне жұмыс механизмінің технологиялық
шартары бойынша қойылатын талаптар
Жеделсатының электр жетегіне қойылытын негізгі талаптар:
- қауіпсіздік, сенімділік;
- қозғалыстың, тежеудің, екпіннің бір қалыптылығы;
- кабина аялдамасының дәлдігі;
- минималды және тұрақты шығындар;
- реверсивтелу мүмкіндігі;
- өтпелі процестердің минималды уақыты кезінде механизмнің
максималды өнімділігі.
Жеделсатының жұмысында шу деңгейі жоғары болмау керек және теле -
радиоқабылдағыштарға бөгет тудырмауы қажет.
Жеделсаты электр жетегінің жұмыс режимі қайталама-қысқа уақытты
болып табылады, іске қосылу ұзаққтығы 40-50%. Сонымен бірге орнатылған
жылдамдықпен қозғалу кезеңінің болмауын ескеру қажет (қабат арасындағы
қозғалыста) .
Электр жетектерінң құрылымына және оның басқару жүйесіне
байланысты іске асатын негізгі талаптардың бірі - кабинаның ақырындауын
және жылдмдауын шектеу болып табылады. Жұмыстың қалыпты режимі
кезіндегі жылдамдатудың (ақырындаудың) максималды шамасы 2 м/с2 аспау
керек.
Жолаушы жеделсатылары үшін бір сағаттағы қосылу жиілігі 100-240рет
болу керек.
Машина ғимаратындағы күштік электр тізбектерінің кернеуі 660 В
жоғары болмау керек, бұл үлкен номиналды кернеуі бар қозғалтқыштарды
қолдану мүмкіндігін жояды.
Қозғалтқышқа қорек кернеуін жіберу және тежеудің электромагниті бір
уақытта болу керек.
Кабина тоқтаған кезде электр қозғалтқыштың ажырауы тежеуден кейін
болу керек.
Сақтандырғыштарды,
қосқыштарды және тағы басқа түрлі
құрылғыларды қозғалтқышпен оның қоректенуші түрлендіргішінің
арасындағы якорь тізбегімен қосуға рұқсат етілмейді.
Электр қозғалтқыштарды қайта жүктеу және КЗ жағдайында жеделсаты
электр қозғалтқыш жетегіндегі кернеудің түсуі мен механикалық тежеудің
салынуы қамтамасыз етілуі керек.
Жеделсатылы жолаушы
орнатуының параметрлері 1. 1. кестеде
келтірілген.
Кесте 1. 1 - Жеделсаты қондырғыларының параметрлері
1. 3 Жүйенің электр жетегін сапалы таңдау
Қазіргі уақытта берілген жүйе үшін келесі жетек түрлері кең таралған:
- жиілікті түрлендіргіш -қысқа тұйықталған роторы бар асинхронды
қозғалтқыш;
- басқарылатын түзеткіш - тұрақты токтың қозғалтқышы;
- жылдамдықты реостатты реттеуі бар жетек.
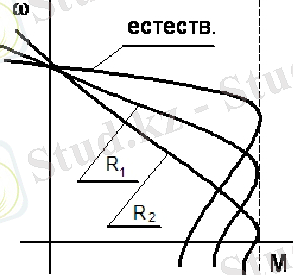
Қысқа тұйықталған роторы бар асинхронды қозғалтқыштарда реостатты
реттеу статорлы тізбекке активті қосымша кедергіні енгізу арқылы орындалуы
мүмкін. Бұл жағдайда механикалық сипаттамалар R1 әр түрлі мәндерде
тұрғызылады. Осындау реттеу әдісі кезінде сипаттаманың қатаңдығы мен
критикалық моменттің төмендеуі болады. Қазіргі уақытта реттеудің бұл әдісі
қолданылмайды.
Мехникалық сипаттамалардың теңдеуіне сәйкес реосттатты
сипаттамалар келесідей болады (1. 2 суретті қара) .
R1 < R2 < R3
1. 3 сурет - Асинхронды қозғалтқыштар үшін реостатты сипаттамалар
Реттеудің бұл әдісі келесі көрсеткіштермен сипатталады:
- жылдамдықты реттеу тек негізгіден төмен ғана болуы мүмкін;
- тораптан қолданыс алатын қуат идеалды бос жүрістің жылдамдығы
өзгермегендіктен, тұрақты болып қалады;
Қосымша кедергінің ұлғаюында біліктегі қуат жылдамдықтың түсуі
нәтижесінде азаяды;
Сипаттамалардың қатаңдығы қосымша кедергінің өсуімен түседі:
Күштік тізбектердегі шығындар жылдамдықтың статикалық
төмендеуіне пропорционал және ол сипаттама қатаңдығының төмендеуінде
ұлғаяды;
Сипаттама қатаңдығының төмендеуіне орай реттеу диапазоны көп емес;
Ауыстыру машинаның күштік тізбегінде жасалғандықтан және сырғу
контактілері бар реостаттардың қолданысы мүмкін болмағандықтан реттеу
бірқалыпты болмайды;
Керек жабдықтардың төмен бағасына байланысты күрделі шығындар
көп емес.
Қазіргі кезде жылдамдықты реттеудің бұл әдісі қолданылмайды.
Жеделсатылық қондыруға қойылатын шарттар электр жетекті жүйемен
қамтамасыз етуді, минималды энергетикалық және материалдық шығын
кезінде максималды өндірістегі барлық керек операциялардың орындалуын
талап етеді.
Технологиялық шарттардан 0, 4 кВ кернеуіндегі қысқа тұйықталған
роторы бар асинхронды қозғалтқыш нұсқасын тңдаймыз.
Қоректік торапқа қосылуы және олардың кең таралуы кезіндегі (барлық
тұрғын үйлерде) аз материалды шығындар;
Электр қозғалтқыштың ысқыланатын бөлшектері болмағандықтан,
механикалық айырулар аз;
Адамдарды тасу кезінде маңызды фактор болып табылатын қатардан
анда-санда шығады.
Басқарушы электроника қолданысы электр жетек мүмкіндіктерін
кеңейтуге мүмкіндік береді:
- Іске қосу моментін жоғарылату;
- Тоқтарды шектеу;
- Реттеудің бірқалыптылығын қамтамасыз ету;
- Электр жетек жүйесін таңдауға тоқталайық-асинхронды электр
қозғалтқыш -жиілік түрлендіргіш.
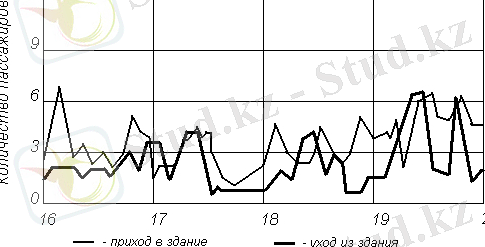
Жолаушыларды тез тасудың міндеті, яғни жолаушылық
жеделсатыларды жобалау көп қабатты ғимараттар, әсіресе әкімшілікте уақыт
бойынша ауытқымалы жолаушылар ағынының орны байқалады. 1. 5. суреттте
жеделсатының қызу жұмыс уақытындағы тұрғын үй жолаушыларының
қозғалу кестесі көрсетілген.
1. 4 сурет - Тұрғын үйдегі жолаушылардың қозғалу кестесі
Әртүрлі жеделсатыларда әр түрлі жүктелу болады және
жеделсатыларды жобалау түрлі амалдарды талап етеді. Сондықтан биік және
әкімшілік ғимараттарында жүктелу шыңы уақытында жеткілікті өтпелі тік
тасу мүмкіншілігін қамтамасыз ететін жоғары қозғалыс жылдамдықтары және
жүк көтергішті бар жеделсатыларды қолдану қажет.
Тасылатын жолаушылардың максималды саны-9 адам, яғни максималды
рұқсат етілетін салмақ-800кг.
2. Жеделсатылық қондырудың күштік жабдығын таңдау
2. 1 Жеделсаты электр қозғалтқышының қуатын таңдау
Тұрғын және әкімшілік ғимараттарындағы жолаушылық көтермелеу
қарсы салмақпен орындалады. Кабина биіктігі 50м жоғары болған кезде
арқандарды теңестіруші негізгі жүргізетін арқандардан басқа, қарсы салмақ
пен кабина қосылады. Шамамен бірдей тығыздықтағы тұрғындарымен
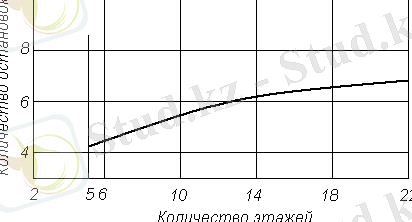
қабаттардағы мүмкін аялдамалардың саны 2. 1. сурет бойынша анықталуы
мүмкін.
2. 1 сурет - Жеделсаты кабинасындағы мүмкін аялдамалар санын анықтау
кестесі
Берілген кестеден аялдамалар санын 7 тең деп қабылдауға болады.
Көтермелер үшін қарсы салмақ оның бос кабинадағы ауырлық күшін және
көтерілетін номиналды жүкті теңгеруі бойынша таңдалады.
Gпр = G 0 + α ⋅ Gн + 0, 5 ⋅ G у . к . H,
(2. 1)
мұндағы G 0 -кабинаның ауырлық күші Н;
α -теңгеру коэффициенті, әдетте 0, 4 тең деп қабылданады;
Gн -номиналды көтерілетін жүктің ауырлық күші Н;
G у . к . -теңестірілетін арқандардың ауырлық күші Н.
Аз қабатты ғимараттарға қызмет көрсету кезінде жүргізуші
арқандардың массасы аз шаманы құрайды және жетектің жұмысында аз
білінеді. Көтерме биіктігін 50м және одан жоғары ұлғайту кезінде кабинаның
теңгерілуі байқалатын арқан массасы бірнеше бірнеше мың килограммға
жетуі мүмкін. Сондықтан үлкен биік көтермелері бар жеделсатылардағы арқан
өтемақысы үшін кабина мен қарсы салмақты қосатын теңестіруші арқандар
қолданылады. Теңестіруші
арқандардың
массасы
жүргізуші
массада
қабылданады.
G 0 = m 0 g = 5000 Н,
Gн = mн g = 8000 Н,
G у . к . = m у . к . g = 2000 H,
Gпр 5000 0, 4 8000 1000 9200 Н.
Қарсы салмақтың қатысуында жүк көтерілу кезіндегі қозғалтқыштың
статикалық қуаты
Pc =
(G
0
+ G н − G пр ) ⋅υ
η
⋅ 10 − 3 кВт,
(2. 2)
мұндағы υ -жүк көтеру жылдамдығы м/с;
η - көтеру механизмінің П. ә. к. ;
υ = 2, 5 м/с;
η = 0, 85 .
Pc =
(5000 + 8000 − 9200) ⋅ 2, 5 = 11, 18 кВт.
0, 85
Жеделсатының υ жылдамдығында l = 75 м биіктікке ауысу уақыты:
t =
l
υ
=
75
2, 5
= 30 с,
(2. 3)
мұндағы: t 01 = 1с -жолаушыларды жүктеу және түсіру уақыты;
t 01 = 1 с-есікті ашу және жабу, жеделсаты қозғалтқышын қосу
үшін қажетті қосынды уақыт;
t 03 = 2, 8 с-жеделсаты кабинасының жылдамдату және
бәсеңдету уақыты.
Қосу ұзақтығын тұспалдап анықтаймыз:
ПВСЭ =
2 ⋅ t
2 ⋅ t + 9 ⋅ t 01 + 9 ⋅ t 02 + 9 ⋅ t 03
⋅ 100 =
2 ⋅ 30
2 ⋅ 30 + 9 ⋅ 1 + 9 ⋅ 6, 5 + 9 ⋅ 2, 8
⋅ 100 = 49% . (2. 4)
КПД механизмдерінің
G 0
Gн + G 0
=
5
5 + 8
= 0, 38 кезіндегі жүктемеден
тәуелділік кестесі бойынша η = 0, 75 пайдасыз жеделсаты ауысуының ПӘК
табамыз.
ПВСЭ = 49% кезінде қозғалтқышты алдын ала таңдауды қуат бойынша
жүргізуге болады:
Pн1 ≈ k ⋅ Pc = 1, 4 ⋅ 82, 3 = 16, 76 кВт.
(2. 5)
ПВСЭ = 49%
кезінде
қозғалтқыштардың номиналды қуаттары
... жалғасыСіз бұл жұмысты біздің қосымшамыз арқылы толығымен тегін көре аласыз.
- Іс жүргізу
- Автоматтандыру, Техника
- Алғашқы әскери дайындық
- Астрономия
- Ауыл шаруашылығы
- Банк ісі
- Бизнесті бағалау
- Биология
- Бухгалтерлік іс
- Валеология
- Ветеринария
- География
- Геология, Геофизика, Геодезия
- Дін
- Ет, сүт, шарап өнімдері
- Жалпы тарих
- Жер кадастрі, Жылжымайтын мүлік
- Журналистика
- Информатика
- Кеден ісі
- Маркетинг
- Математика, Геометрия
- Медицина
- Мемлекеттік басқару
- Менеджмент
- Мұнай, Газ
- Мұрағат ісі
- Мәдениеттану
- ОБЖ (Основы безопасности жизнедеятельности)
- Педагогика
- Полиграфия
- Психология
- Салық
- Саясаттану
- Сақтандыру
- Сертификаттау, стандарттау
- Социология, Демография
- Спорт
- Статистика
- Тілтану, Филология
- Тарихи тұлғалар
- Тау-кен ісі
- Транспорт
- Туризм
- Физика
- Философия
- Халықаралық қатынастар
- Химия
- Экология, Қоршаған ортаны қорғау
- Экономика
- Экономикалық география
- Электротехника
- Қазақстан тарихы
- Қаржы
- Құрылыс
- Құқық, Криминалистика
- Әдебиет
- Өнер, музыка
- Өнеркәсіп, Өндіріс
Қазақ тілінде жазылған рефераттар, курстық жұмыстар, дипломдық жұмыстар бойынша біздің қор #1 болып табылады.

Ақпарат
Қосымша
Email: info@stud.kz