Бағдаршам туралы есеп: көлік ағымдарының макроскопиялық және микроскопиялық модельдері мен модельдеу жүйелері

ӘЛ-ФАРАБИ АТЫНДАҒЫ ҚАЗАҚ ҰЛТТЫҚ УНИВЕРСИТЕТІ
МЕХАНИКА-МАТЕМАТИКА ФАКУЛЬТЕТІ
АҚПАРАТТЫҚ ЖҮЙЕЛЕР КАФЕДРАСЫ
«Бағдаршам туралы есеп»
тақырыбына жазылған
ДИПЛОМДЫҚ ЖҰМЫС
(қолы)
Ғылыми жетекші
ф. -м. ғ. д., профессор
(қолы)
(қолы)
«Қорғауға жіберілді»
Кафедра меңгерушісі
PhD докторы
(қолы)
Алматы 2014
РЕФЕРАТ
Дипломдық жұмыс 49 беттен, 20 суреттерден, 15 қолданылған әдебиеттер мен 1 қосымшадан тұрады.
Кілт сөздер : БАҒДАРШАМ, МАКРОСКОПИЯЛЫҚ ҮЛГІ, МИКРО-СКОПИЯЛЫҚ ҮЛГІ, ТРАНСПОРТТЫҚ АҒЫМ, ТРАНСПОРТТЫҚ КЕП-ТЕЛІС, КЕПТЕЛІС ТЫҒЫЗДЫҒЫ, ЛАЙТХИЛЛ-УИЗЕМ-РИЧАРДС МОДЕЛІ.
Жұмыстың өзектілігі : Бүгінде жол жүрудің басты ережесі-бағдаршам. Онсыз қала көшелеріндегі кептелісте көлік жүргізуші мен қара жаяу халық үшін бір бағытта жүруге мүмкіндік жоқ. Сол себепті жолдың жөнделмеуі мен тұрғындар жиі жүретін көшелердегі бағдаршамдардың жетіспеуі күн тәртібінде күйіп тұрған мәселенің бірі болып тұр. Күресу жолдарының ең тиімді және арзан түрі транспорттық көлік ағымдарын математикалық пішіндеу арқылы зерттеу болып табылады. Сол себепті ҚР-да осы саланы дамыту өзекті мәселе деп есептеледі.
Жұмыстың зерттеу нысаны : Қалалық көлік қозғалыс ағындарының макроскопиялық және микроскопиялық үлгісі, ақпараттық жүйесі.
Жұмыстың мақсаты : Бағдаршам туралы есепті пайымдау. Кептеліс болдырмау.
Жұмыстың нәтижелері : Кинетикалық теңдеуден макроскопиялық модельдерді шығару.
Жұмыстың практикалық мағынасы : Әзірше дипломдық жұмыстың нәтижелері теоретикалық болып тұр, жұмыста аталған ұсыныстар өзге шет елдерде қолданыс тапқан. Практикада қолданылады деп болжанады.
Жұмыстағы қолданылған әдістер : Ықтималдықтар теориясының әдістері, пішіндеу әдістері, программалау әдістері.
РЕФЕРАТ
Дипломная работа состоит из 49 страниц, 20 рисунков, 15 источников и 1 приложения.
Ключевые слова : СВЕТОФОР, МАКРОСКОПИЧЕСКАЯ МОДЕЛЬ, МИКРОСКОПИЧЕСКАЯ МОДЕЛЬ, ТРАНСПОРТНЫЙ ПОТОК, ТРАНСПОРТНЫЙ ЗАТОР, ПЛОТНОСТЬ ЗАТОРА, МОДЕЛЬ ЛАЙТХИЛЛА-УИЗЕМА-РИЧАРДСА.
Актуальность работы : На сегодняшний день главным правилом дорожного движения является светофор. Без него в уличных заторах пешеход и водитель не могут двигаться в одном направлении. Есть множество различных способов борьбы против возникновения транспортных заторов. Самым выгодным и доступным способом борьбы является исследование транспортных потоков с помощью математического моделирования. Поэтому в РК развивать эту сферу является актуальной задачей.
Объект исследования : Макроскопическая и микроскопическая модель движения городского транспорта и информационные системы.
Цель работы : Основная цель: улучшить задачу светофора. Избежание заторов.
Результаты работы : Вывод макроскопических моделей из кинетического уравнения
Практическое значение работы : Пока что результаты работы являются теоретическими, приведенные предложения по улучшению дорожных движений используются в развитых странах. В дальнейшем планируется использование на практике
Использованные методы в работе : Методы теории вероятностей, методы моделирования, методы программирования.
ABSTRACT
Diploma project consists of 49 pages, 20 figures, 15 references and 1 appendix.
Keywords : TRAFFIC LIGHT, MACROSCOPIC AND MICROSCOPIC MO-DEL, TRAFFIC FLOW, CONGESTION, DENSITY CONGESTION, LWR’S MODEL.
Actuality : To date, the main rule is the traffic lights. Without him in the street congestion of pedestrians and drivers can not move in the same direction. There are many different ways to fight against the occurrence of congestion. The most profitable and affordable way to fight is to study the traffic flow using mathematical modeling. Therefore, in the Republic of Kazakhstan to develop this sphere is an urgent task.
Object of research : Macroscopic and microscopic model of urban transport and informatione systems.
Objective : The main objective: improve traffic problem. Avoid congestion.
Deliverable : Derivation of macroscopic models from the kinetic equation.
Practical Importance : So far, results are theoretical, given suggestions to improve traffic movements used in developed countries. In the future we plan to use in practice
The methods used in the work : Methods of probability theory, modeling techniques, programming methods.
МАЗМҰНЫКІРІСПЕ7
1 СВЕТОФОР 2. 0, TRANSCAD ЖӘНЕ TRANSMODELER АҚПАРАТТЫҚ ЖҮЙЕЛЕРІНДЕ БАҒДАРШАМДЫ АЛЬТЕРНАТИВТІ БАСҚАРУДЫ ТАЛДАУ8
1. 1 СВЕТОФОР 2. 0 компьютерлік бағдарламасы8
1. 2 TransModeler трафик пакетінде бағдаршам сигналдарын альтернативті түрде басқаруды талдау8
1. 3 TransCad географиялық ақпараттық жүйесінде көлік ағымының қозғалысын бақылау11
2 КӨЛІК АҒЫМЫН ТАЛДАУҒА АРНАЛҒАН ҚАЖЕТТІ МАТЕМАТИКАЛЫҚ ТҮСІНІКТЕР МЕН ДЕРЕКТЕР13
2. 1 Макроскопиялық модельдер13
2. 1. 1 Лайтхилл-Уизем-Ричардс моделі13
2. 1. 2 Танака моделі20
2. 1. 3 Уизем моделі21
2. 1. 4 Пэйн моделі және оның жинақталуы21
2. 1. 5 Кинетикалық модельдер21
2. 1. 6 Стохастикалық модельдер22
2. 2 Микроскопиялық модельдер22
2. 2. 1 Ньюэллдің тиімді жылдамдық моделі23
2. 2. 2 Трайбераның «ақылды жүргізуші» моделі24
2. 2. 3 Клеткалы автомат модельдері26
3 БАҒДАРШАМ ТУРАЛЫ ЕСЕП32
3. 1 Бағдаршам түсінігі32
3. 2 Бағдаршамның жұмыс істеу принципі32
3. 3 Бағдаршам туралы есеп (ҚАНДАЙ ЖАҒДАЙДА БАҒДАРШАМ АЛДЫНДА КЕПТЕЛІС ОРЫН АЛМАЙДЫ) 35
ҚОРЫТЫНДЫ38
ҚОЛДАНЫЛҒАН ӘДЕБИЕТТЕР ТІЗІМІ39
Қысқартылған сөздер тізімі
LWR моделі -Лайтхилл-Уизем-Ричардс моделі
АТҚ -Автокөліктік транспорттық қозғалыс
АЖ -Ақпараттық жүйелер
ST -Sim Traffic
ГАЖ -Географиялық ақпараттық жүйесі
ОЖ -Операциялық жүйелер
Анықтамалар
Бағдаршам - жарықпен белгі беру арқылы көшедегі, автомобиль жолы мен темір жолдағы қозғалысты реттеуге арналған құрылғы.
Кептеліс - жолдың өткізу мүмкіндігінен ағын тығыздылығының жоғары болғандыктан, көлік ағынның жылдамдылығының нөлге дейін түсуіне сәйке келетін күй.
Көлік, көлік кешені - экономиканың инфрақұрылымын қалыптастыратын салалардың бірі.
Жолаушы ағымы - белгілі бір уақыт көлеміндегі бір бағытта тасымалданған жолаушылар санын анықтайтын көлік өнімінің өлшеуіші.
КІРІСПЕСіз бен біз күнделікті өмірде бағдаршам сынды адамзаттың кезекті таңғажайып өнертабысымен жиі ұшырасып қалып жатамыз, оның көмегіне жүгінеміз. Ал сол аталған бағдаршамның тамыры мен дамуы, жұмыс жасау принципі туралы мәліметтерді жете біле бермейміз. Математикалық тұрғыдан қарағанда бағдаршамның жұмыс жасау әрекетіне, кептеліс орын алған кездегі тиімді шешімді табуға бағытталған нақты есептеулер қолданылады.
Мен өзімнің дипломдық жұмысымда ең алдымен бүгінгі таңда өзекті мәселелердің бірі-бағдаршам қызметін жақсарту арқылы кептеліс пен басқа да жол апаттарын болдырмаудың жолдарын қарастырдым. Және де транспорттық көлік ағымын талдауға қажетті математикалық түсініктер мен деректерге, яғни макроскопиялық, микроскопиялық моделлерге, физиктер мен математиктердің көлік ағымының қозғалысын бақылауға, бағдаршам сигналдарының жұмыс істеу моделіне бағытталған есептеулеріне аса тоқталып өттім. Сонымен қоса, географиялық ақпараттық жүйелердің ішіндегі ең кең қолданыс тапқандарын зерттедім.
Әдетте көлік ағымы, кептеліс және бағдаршам қаз қатар жүретін түсініктер болып табылатыны хақ. Сондықтан мен бағдаршам туралы есепке тоқталмас бұрын транспорттық көлік ағымын сипаттап, кептеліс орын алған жағдайдағы шешімге қол жеткізуді ашып көрсетуді жөн көрдім.
Жұмыстың негізгі бөлімінде макроскопиялық моделдердің негізгі түрлері келтірілген, әсіресе біржолақты транспорттық көлік ағымына мысалдар жиі кездеседі. Гидродинамикалық аналогияларға терең назар аударылған. Бұл бөлімнің кілттік түсінігі сақталу заңына арналған транспорттық көлік ағымын суреттейтін бастапқы Коши есебінің жалпы шешімі болып табылады. Атап айтқанда, Лайтхилл-Уизем-Ричардс моделіне жете тоқталдым. Бұл макроскопиялық модел транспорттық көлік ағымы қозғалысының динамикасын есептеудегі тапсырмас дүние болып табылады. Және бұл модел біз қарастырып отырған макроскопиялық моделінің айырмалық және дифференциалды-айырмалық аналогы болып табылады. Сонымен қоса Танака моделіне, Пэйн моделіне, Уизем моделіне және олардың жинақталуына назар аударылған.
Транспорттық көлік ағымы қозғалысы мен кептеліс жағдайын анықтаған соң бағдаршамның осы аталғандармен қай уақытта тиімді және қай уақытта тиімсіз қызмет ететіндігін зерттедім. Әсіресе қандай жағдайда бағдаршам алдында кептеліс орын алмайтындығын көрсететін есепке тоқталдым.
1 СВЕТОФОР 2. 0, TRANSCAD ЖӘНЕ TRANSMODELER АҚПАРАТТЫҚ ЖҮЙЕЛЕРІНДЕ БАҒДАРШАМДЫ АЛЬТЕРНАТИВТІ БАСҚАРУДЫ ТАЛДАУ 1. 1 СВЕТОФОР 2. 0 компьютерлік бағдарламасыБағыты
Автокөліктер санының күннен күнге артуы қалалардағы жол жүйесінің жұмысын қиындатты. Автокөліктер санының артуы қаладағы бағдаршам санына тікелей әсер етеді. Сондықтан бүгінгі таңда жол жүйесін реттеудегі маңызды бөліктің бірі-жол тораптарын қалыпқа келтіру болып саналады.
Алайда жол тораптарын реттеу бүгінде жеткілікті емес. Ең алдымен, Біз бағдаршам жұмысының кешенді тиімділік бағасын анықтауымыз қажет.
Жол тораптарын реттеу үшін сапалы есептеулер қажет. Осы мақсатта қазірігі таңда Светофор 2. 0 бағдарламасы бізге қол ұшын бере алады. Бұл бағдарлама американдық Highway Capacity Manuаl 2000 жол тораптарының тиімділігін анықтайтын әдістемесі негізінде жасалған. Ол Ресей жолдарына икенделу мақсатында өзгертілген.
(2. 0) нұсқасы бағдаршам сигналының жұмыс істеу тәртібін AutoCad бағдарламасында түрлендіруге мүмкіндік береді. Енді тек визуалды басқарудағы жасыл сигнал ұзақтығы мен оны реттеудегі жобалаудың қалпын көруге ғана болмайды, сонымен қоса жобалау нәтижелерін AutoCad бағдарламасы арқылы баспаға жіберуге болады.
Соңғы (2. 0) нұсқасы жол торабындағы көліктер ұзындығын анықтауғы мүмкіндік береді. Ол желілік кептелістерді болдырмаудың таптырмас құралы болып саналады.
Желілік кептеліс - жол торабындағы кезек ұзындығы келесі қозғалыс болып жатқын жол торабын жауып қалу.
Светефор 2. 0 бағдарламасымен жұмыс істеу
Жаңа файл құру немесе өзге дайын файлдарды ашу үшін бірінші жұмыс терезесінде жол тораптарына жақындауға мүмкіндік береді. Бұл кезең келесі батырмалар арқылы іске асады:
 - жол торабына жаңа жақындау тәсілін табу
- жол торабына жаңа жақындау тәсілін табу
 - жақындау тәсілін жою
- жақындау тәсілін жою
 - өзгертулерді сақтау
- өзгертулерді сақтау
Осы және өзге кезеңдерде жоба файлын сақтау үшін келесі батырма қолданылады:
 - жоба файлын сақтау
- жоба файлын сақтау
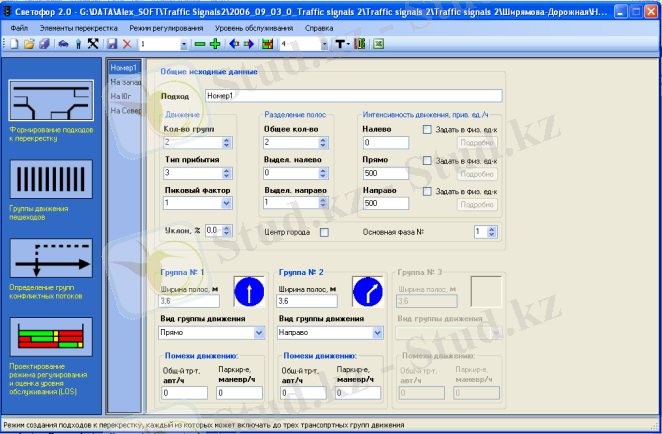
1. 1-сурет. Жол торабына жақындау тәсілін жасау терезесі

1. 2-сурет. Басымдылық ережелерін анықтау терезесі
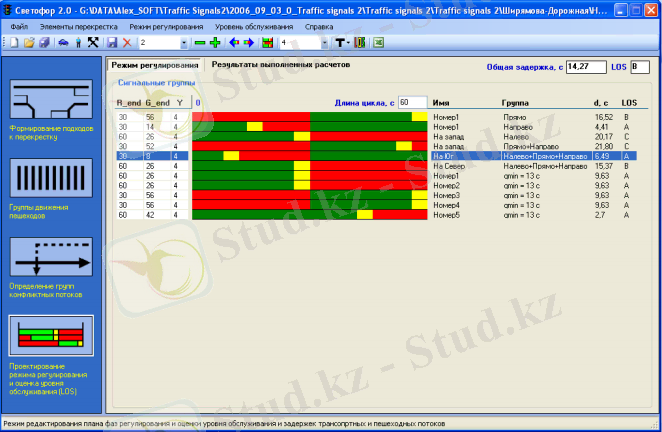
1. 3-сурет. Қалыпқа келтіру тәртібін жобалау терезесі
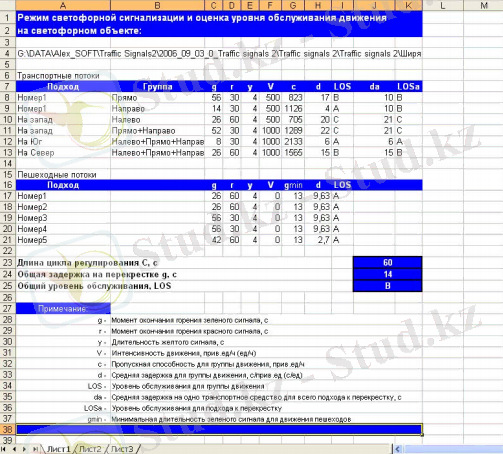
1. 4-сурет. Есептеулерді MS Excel-ге экспорттау
1. 2 TransModeler трафик пакетінде бағдаршам сигналдарын альтернативті түрде басқаруды талдауTransModeler моделдеудің мықты және әмбебап трафик пакеті болып табылады. Қозғалысты жобалау және есептерді модельдеуінің кең спектріне қолданылады. TransModeler автожолдардан орталық мөлтек аудандарға дейінгі көлік желілерін имитациялай алады. Және де жол мультимодальді желілердің кең аймағын жоғары нақтылықпен және егжей-тегжейлі талдай алады. Біз ағым динамикасының бағасын, бағдаршам сигналын және оның қызметін, сонымен қоса желінің ортақ өндірімділігін үйлестіру үшін географиялық ақпараттық жүйенің (ГАЖ) 2-лік және 3-тік ортада қиын жүйелердің қозғалысын моделдей және елестете аламыз.
TransModeler қиын қосымшаларды жеңіл қолданудағы жаңа көкжиектерге әкеледі. Ол АҚШ-тағы ең танымал TransCad программалық жабдықтамасымен интеграцияланады.
Соңғы зерттеулер негізінде, TransModeler трафикті моделдеуді жаңа заманауи бейнеге келтіру мақсатында озық әдістемелік әдіс-айланы және бағдарламалық технологияны пайдаланады. TransModeler модлдері тарихи немесе жолға байланысты модельді уақытқа негізелген жүргізушінің динамикалық жол бағдарынан көрініс табады.
Ол қоғамдық көлікті, автокөліктер мен жүк көліктерін имитациялайды, оған қоса ал платаны электронды құрастыру, қозғалысты бақылау, анықтау секілді мүмкіншіліктерінің кең спектрін өңдейді. TransModeler сапар сұранысын болжамдау бағдарламалық қамсыздандыруымен жұмыс істейді, ол көліктік жоба мен жоспардың оперативті анализін орындауға арналған. Трафикті модельдеуінің нәтижелері кейін сапар сұранысын болжамдау үшін кері қолданыла алады.
Қолданудағы жеңілділік
Суппорт Corporation, географиялық ақпараттық жүйелер мен көлік саласындағы жетекші программалық жабдықтама болып табылады. TransModeler жол инженерлері мен кескіндеушілері қолдануға жеңіл болу үшін құрастырылған. TransModeler қолданушы интерфейсі түсінуге өте жеңіл және Windows стандарттарын толық қамтамасыз ететін жалғыз модельдеудің программалық жабдықтамасы болып есептеледі.
TransModeler бірнеше жобаларды, желілер, сұраныс көрінісін құрастыру мен басқаруға, бағдаршам сигналдарын альтернативті түрде басқаруды талдауға мүмкіндік береді. TransModeler келесі мүмкіндіктерге ие:
- Corsim және SimTraffic-тен модельдеу мәліметтерін импорттау;
- Бірнеше тізім үшін әртүрлі кіру файлдарын басқару;
- Жергілікті масштабта трафик операцияларын имитациялау үшін үлкен желі-лердің ішкі облыстарын экспорттау.
1. 5-сурет. TransModeler трафик пакетіндегі жолдарды толтыру сұлбасы
TransModeler SE талапты есептемелік тапсырмаларды орындайтын, техникалық программалық жабдықтаудың жоғары өнімділігі болып табылады.
Сәйкесінше, біз ең жылдам, қарапайым бағаланған кез келген уақыт моментінде қол жетімдісін таңдауды ұсынамыз. TransModeler Windows 7 қажет етеді.
Операциялық жүйесі
Windows 7 немесе Windows 8. Біз 64-разрядтық ОЖ ұсынамыз, сондықтан сіз қосымша жадқа TransModeler SE-дің жаңа 64-разрядты нұсқасы арқылы қол жеткізе аласыз.
TransModeler SE ең жылдам процессорлерге тиімді, және біз үлкен модельдермен жұмыс үшін 4, 6 немесе 8-ядролық, 1 немесе 2 прцессорлық машиналарды ұсынамыз. TransModeler SE көпағымды кілттік процедуралар, бейнелерді автоматты тану бар және бірнеше ядро мен бірнеше процессорлар артықшылығына ие.
Процессор (CPU)
Жұмыс станциялары үшін біз Intel Haswell және Ivy Bridge процессорларын ұсынамыз (Core i7 және Xeon E3-1200 және E5-2600 үшінші және төртінші буындары ), себебі олар Intel Core 2 ескі процессорларымен салыстырғанда өнімділіктің маңызды жетілдірулерін ұсынады. Core i7 және Xeon 3500/3600 және 5500/5600 екінші буындағы сериялары, сондай-ақ, тиімді нұсқалар. Негізгі
үстел үстілік i5 процессорлары да қанағаттандырарлық, алайда аздап баяулау.
Қазіргі уақытта біздің жұмыс станциялардың жылдам компьютерлері екі 3. 1GHz E5-2687W 8-ядролық процессоры барDell T7600, 192 Гбайт жады және 64-битті Windows 7 Professional.
Ноутбуктар үшін біз ең жылдам Haswell мобильді төрт ядролы i7s радиаторларын ұсынамыз, себебі олар аккумулятордың едәуір ұзақ қызмет уақытына ие және жұмыс үстелі сияқты жылдам болуы мүмкін.
Қозғалысты басқару
TransModeler бағдаршам мен әртүрлі интеллектуалды көліктік жүйелер (ИКЖ) сигналдарын имитациялайды.
Жол сигналдары:
TransModeler жол сигналдарын басқарудың ауқымды спектрін имитациялайды:
- Бағдаршам сигналдарының ортақ жүйелерін имитациялау, сонымен қоса сигналды басқару жетегін қозғалысқа келтіру;
- Бағдаршам сигналдарын басқарудың тым қиын жүйелерін имитациялау, сонымен қоса басқару жетегімен келісілген және үйлестірілген;
- Тасымалдау стратегиясының моделі мен көлік құралдарын апаттық қолданылу сигналдары басымдылыққа ие;
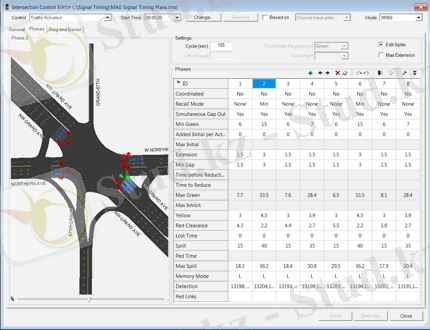
- Диаграмманың фазалық топтар, тұжырымдама бөгеттері және сақина негізінде немесе сигналдық реттеушілерді іске қосу үшін келтіріліп отырған шаблондарды қолдану керек.
1. 6-сурет. Қала ішіндегі қозғалыс сұлбасы
1. 3 TransCad географиялық ақпараттық жүйесінде көлік ағымының қозғалысын бақылауTransCad ең алғаш және жалғыз географиялық ақпараттық жүйе болып табылады (ГАЖ), оны мамандар арнайы көлік қозғалысы туралы мәліметтерді сақтау, көру, басқару және саралау үшін жасап шығарған.
TransCad географиялық ақпараттық жүйе мен транспорттық көлік қозғалысының моделлеу мүмкіндіктерін бір интеграцияланған платформасын қамтиды.
TransCad кез келген көлік түріне, кез келген масштабта және бөлшектеу деңгейінде қолданыла алады.
TransCad ұсынады:
- тасымалдауға арналған арнайы мүмкіндіктері бар сапалы ГАЖ қоздырғышы;
- көлік қондырғыларын көруге, саралауға арналған құрылғылар;
- маршрутизациялауға, саяхаттау сұранысын жобалауға, қоғамдық көлікке, логистикаға, аймақтың орналасуы мен оны басқаруға арналған программалық модульдер.
TransCad нұсқалары:
TransCad екі нұсқада жасалған: Standart (немесе толық TransCad) және TransCad негіздері. TransCad негіздері дәл Standart TransCad жасалған программалық жабдықтамасы арқылы құрылған.
TransCad өзге ГАЖ, САПР және мәліметтер қорымен қолданыла алады
Мәліметтерге кіру: TransCad өз мәліметтерін қолдана отырып карта жасауға мүмкіндік береді. Егер сіз өз мәліметтеріңізді Excel парағында, Access кестелерінде, файлдар мәліметтер базасында немесе Oracle, SQL Server сияқты кез келген ODBC мәліметтер көзіне сәйкес файлдарда сақтасыңыз, онда TransCad сіздің мәліметтеріңізбен жұмыс жасай алады. Мастер мини- картасын жасау мәліметтерді бейнелеу, георграфиялық анализдеу және орналастыру мүмкіндіктерін береді.
TransCad транспорттық кәсіпқойлар қолданатын, транспорттық мәліметтерді сақтауға, бейнелеуге, басқаруға және анализдеуге арналған алғаш және жалғыз Географиялық ақпараттық жүйе (ГАЖ) . TransCad кез келген басқа пакет бойынша теңдесі жоқ мүмкіндіктерді қамтамасыз ете отырып, біріктірілген платформа негізінде, Географиялық ақпараттық жүйесін модельдеудің транспорттық мүмкіндіктерімен үйлестіреді. TransCad транспорттың кез келген түрі үшін, кез келген масштабта қолданыла алады. TransCad келесі мүмкіндіктерді қамтамасыз етеді:
Тасмалдауға арналған арнайы кеңейтулері бар қуатты ГАЖ қозғалтқыш;
Транспорттық қосымшаларға арналған бейнелеу, сипаттау және анализ жасау құрал-саймандарын;
Бағдарлауға, саяхат сұранысын болжауға, қоғамдық транспортқа, логистикаға, орналасуға және аймақтарды басқаруға арналған программалық модульдерді қамтамасыз етеді.
Операциялық жүйесі
Windows 7 немесе Windows 8. Біз 64-разрядтық ОЖ ұсынамыз, сондықтан сіз қосымша жадқа TransModeler SE-дің жаңа 64-разрядты нұсқасы арқылы қол жеткізе аласыз.
TransModeler SE ең жылдам процессорлерге тиімді, және біз үлкен модельдермен жұмыс үшін 4, 6 немесе 8-ядролық, 1 немесе 2 прцессорлық машиналарды ұсынамыз. TransModeler SE көпағымды кілттік процедуралар, бейнелерді автоматты тану бар және бірнеше ядро мен бірнеше процессорлар артықшылығына ие.
Процессор (CPU)
Жұмыс станциялары үшін біз Intel Haswell және Ivy Bridge процессорларын ұсынамыз(Core i7 және Xeon E3-1200 және E5-2600 үшінші және төртінші буындары ), себебі олар Intel Core 2 ескі процессорларымен салыстырғанда өнімділіктің маңызды жетілдірулерін ұсынады. Core i7 және Xeon 3500/3600 және 5500/5600 екінші буындағы сериялары, сондай-ақ, тиімді нұсқалар. Негізгі үстел үстілік i5 процессорлары да қанағаттандырарлық, алайда аздап баяулау.
Қазіргі уақытта біздің жұмыс станциялардың жылдам компьютерлері екі 3. 1GHz E5-2687W 8-ядролық процессоры барDell T7600, 192 Гбайт жады және 64-битті Windows 7 Professional.
Ноутбуктар үшін біз ең жылдам Haswell мобильді төрт ядролы i7s радиаторларын ұсынамыз, себебі олар аккумулятордың едәуір ұзақ қызмет уақытына ие және жұмыс үстелі сияқты жылдам болуы мүмкін.
2 КӨЛІК АҒЫМЫН ТАЛДАУҒА АРНАЛҒАН ҚАЖЕТТІ МАТЕМА-ТИКАЛЫҚ ТҮСІНІКТЕР МЕН ДЕРЕКТЕР 2. 1 Макроскопиялық модельдерБұл тарауда макроскопиялық моделдердің негізгі (тарихи және мүмкін болатын қосымшалар тұрғысынан алғанда) түрлері келтірілген, әсіресе біржолақты транспорттық көлік ағымына мысалдар келтірілген. Гид-родинамикалық аналогияларға терең назар аударылған. Бұл бөлімнің кілттік түсінігі сақталу заңына арналған транспорттық көлік ағымын суреттейтін бастапқы Коши есебінің жалпы шешімі болып табылады.
2. 1. 1 Лайтхилл-Уизем-Ричардс моделіХХ ғасырдың 40 жылдарының екінші жартысы мен 50 жылдары КСРО мен АҚШ жарылғыш заттың атылуы кезінде пайда болатын үдерістерді зерттеумен қарқынды айналысқан. Сонымен қоса сақталу заңының теңдеулеріне арналған бастапқы-шеткі есепті (және осындай теңдеулер жүйесін) байқауға көп көңіл бөлінген. Осы уақытта осыған ұқсас теңдеулер кездесетін қосымшалардың артуы байқалған. Осылайша 1955 жылы тәуелсіз зерттеулер барысында алғашқы біржолақты (жол екі жаққа қарай шексіз, қозғалыс солдан оңға қарай (анықтылық үшін), ешқандай автокөліктік құралдар ағыны жоқ) транспорттық көлік ағымының макроскопиялық (гидродинамикалық) моделі ұсынылып, кейіннен Лайтхилл-Уизем-Ричардс моделі атанды ( осы модельді жиі Лайтхилл-Уизем 1 моделі деп атайды ) .
Лайтхилл-Уизем-Ричардс моделінде келесілер бағамдалады:
Ағымның v(t, x) жылдамдығы мен ρ(t, x) тығыздығы арасында өзара бірмәнді тәуелділік бар;
АТҚ тығыздығының ρ(t, x) сақталу заңы орындалады. ρ(t, x) жазуы t уақытындағы х координаталы трасса нүктесінің маңайындағы ұзындық бір-лігінің АТҚ санын білдіреді. Кейде «Уитемнің» орнына «Уизем» деп атайды( С. П. Новиковтың еңбектерінде) .
Яғни, v(t, x) - t уақытындағы х координаталы трасса нүктесінің маңайындағы АТҚ жылдамдығы. Ары қарай барлық жерде транспорттық көлік ағымы макроскопиялық модельдермен сипатталатын кеңістік масштабтары АТҚ-ға тән көлемді айтарлықтай асыратындығы болжанады.
Басқаша айтқанда, транспорттық көлік ағымы алдағы жағдайға байланысты АТҚ әрекеті жете суреттелген кейбір макроскопиялық модельдерге бағынады.
... жалғасыСіз бұл жұмысты біздің қосымшамыз арқылы толығымен тегін көре аласыз.
- Іс жүргізу
- Автоматтандыру, Техника
- Алғашқы әскери дайындық
- Астрономия
- Ауыл шаруашылығы
- Банк ісі
- Бизнесті бағалау
- Биология
- Бухгалтерлік іс
- Валеология
- Ветеринария
- География
- Геология, Геофизика, Геодезия
- Дін
- Ет, сүт, шарап өнімдері
- Жалпы тарих
- Жер кадастрі, Жылжымайтын мүлік
- Журналистика
- Информатика
- Кеден ісі
- Маркетинг
- Математика, Геометрия
- Медицина
- Мемлекеттік басқару
- Менеджмент
- Мұнай, Газ
- Мұрағат ісі
- Мәдениеттану
- ОБЖ (Основы безопасности жизнедеятельности)
- Педагогика
- Полиграфия
- Психология
- Салық
- Саясаттану
- Сақтандыру
- Сертификаттау, стандарттау
- Социология, Демография
- Спорт
- Статистика
- Тілтану, Филология
- Тарихи тұлғалар
- Тау-кен ісі
- Транспорт
- Туризм
- Физика
- Философия
- Халықаралық қатынастар
- Химия
- Экология, Қоршаған ортаны қорғау
- Экономика
- Экономикалық география
- Электротехника
- Қазақстан тарихы
- Қаржы
- Құрылыс
- Құқық, Криминалистика
- Әдебиет
- Өнер, музыка
- Өнеркәсіп, Өндіріс
Қазақ тілінде жазылған рефераттар, курстық жұмыстар, дипломдық жұмыстар бойынша біздің қор #1 болып табылады.

Ақпарат
Қосымша
Email: info@stud.kz