Үш деңгейлі инвертор-асинхронды қозғалтқыш жүйесінің өтпелі үрдістерін зерттеу және векторлы басқару моделін құру

1
ҚАЗАҚСТАН РЕСПУБЛИКАСЫ БІЛІМ ЖӘНЕ ҒЫЛЫМ МИНИСТРЛІГІ
Коммерциялық емес акционерлік қоғамы
АЛМАТЫ ЭНЕРГЕТИКА ЖӘНЕ БАЙЛАНЫС УНИВЕРСИТЕТІ
Электрэнергетика
Электрэнергетикасы
. факультеті
. мамандығы
«Өндірістік қондырғылардың электр жетегі және автоматтандырылуы » кафедрасы
жобаны орындауға берілген
ТАПСЫРМА
Студент
Рысова Айдана
.
(аты - жөні)
Жоба тақырыбы Инвертор - асинхронды қозғалтқыш» жүйесінің өтпелі үрдістерін .
зерттеу
.
ректордың « 29 » _ қыркуйек № _124 бұйрығы бойынша бекітілген.
Аяқталған жұмысты тапсыру мерзімі: «_22__» мамыр 2015 ж.
Жобаға бастапқы деректер (талап етілетін жоба нәтижелерінің параметрлері
және нысанның бастапқы деректері)
Қозғалтқыштың номиналды қуаты P=22 кВт; статордың номиналды
желілі кернеуі U л =380 В; статордың номиналды кернеу жиілігі ƒ=50 Гц; ротордың
номиналды айналым жылдамдығы n=2940 об/мин; номиналды ПӘК ƞ =90, 5 %;
қуаттың номиналды коэффициенті cos ɸ=0, 89; ротордың инерция кезі J=0, 1443
кг·м2; полюстар сыңарының саныZp =1; ротор және статордың толық
индукциясының фазасы L s=Lr=37, 152 мГн; статор кедергісі R s=0, 2922 Oм ; ротор
кедергісі Rr=0, 0882Ом.
Диплом жобасындағы
әзірленуі тиіс сұрақтар тізімі
немесе диплом
жобасының қысқаша мазмұны:
Электржетектерінің басқару жүйесінің талдануы, көпдеңгейлі кернеу
инверторлары мен олардың кең импульсті модуляция арқылы барқару
алгоритмдерінің топологиясы орындалған.
Қысқа тұйықталған роторлы асинхронды машинаның айналатын және
қозғалмайтын координаттар жүйесінде математикалық моделі, сондай ақ соның
негізінде ЭЕМ ортасында компьютерлік моделі құрылды. Векторлық басқару
жүйесін қолдану қажеті негізделді, тоқ контуры мен жылдамдық контурлары
бар структуралық модель құрылып, сол контурлар есептеулерінің нәтижелері
көрсетілген.
2
Сызба материалдарының (міндетті түрде дайындалатын сызуларды көрсету)
тізімі
Үш деңгейлі NPC - инвертор; Төрт деңгейлі NPC - инвертор; Түрлендіргіштің
құрылымдық сұлбасы; Үш деңгейлі FLC - түрлендіргіш; FLC - түрлендіргіш иіні; H -
bridge базасындағы, үш фазалы базалы құрылымындағы сұлбалар; Көп деңгейлі
түрлендіргіш; Каскадты 3/3 NPC -инвертор; Каскадты 5/3H инвертор; Каскадты
NPC/H- bridge инвертор; Басқаратын импульстардың бірінен соң бірі
қалыптасуы; n - деңгейлі инвертор үшін басқаратын импульстардың бірінен соң
бірі қалыптасуы; Үш фазалы екі деңгейлі инвертор; Инвертор кілттерімен
басқару импульстарын қалыптастыру; NPC - түрлендіргіш үшін векторлы
диаграмма;
Негізгі ұсынылатын әдебиеттер
___ 1. Электр жетегі негіздері: Техникалық мамандық алушы студенттерге
арналған/Исаханов М. Ж.
Алматы, 2009. 2. Силовые преобразовательные
устройства: учеб. пособие / Алексеев С. Б. - Алматы: АИЭС, 2006 . 3. Айнамалы
ток электр жетегі (айнымалы токтары) : оқу құралы / Сагитов П. И., Мустафин
М. А. - Алматы, 2008 . 4. Электропривод постоянного тока: Учебное пособие /
Сагитов П. И. 4. Сала экономикасы: оқу құралы /Түзелбаев Б. И. - Алматы, 2007. 6.
Тетельмин В. В., Язев В. А. Асинхронные вентильные каскады и двигатели
двойного питания/Онищенко Г. Б., Локтева И. Л.
- М. : Энергия, 2004. 7.
Тиристорные преобразователи частоты с непосредственной связью / Жемеров
Г. Г.
-
М. : Энергия, 2008 г.
8.
Теория автоматизированного
электропривода/Чиликин М. Г., Ключев В. И., Сандлер А. С.
- М. : Энергия,
2007.
3
4
АҢДАТПА
Дипломдық жұмыста заманауи электржетектерінің басқару жүйесінің
талдануы, көпдеңгейлі кернеу инверторлары мен олардың ке ң импульсті
модуляция арқылы барқару алгоритмдерінің топологиясы орындалған.
Кеңістікті - векторлық кең импульсті модуляциялау қолданысының тиімілігі
дәлелденген .
Қысқа тұйықталған роторлы асинхронды машинаның айналатын және
қозғалмайтын координаттар жүйесінде математикалық моделі, сондай ақ
соның негізінде ЭЕМ ортасында компьютерлік моделі құрылды. Векторлық
басқару жүйесін қолдану қажеті негізделді, тоқ контуры мен жылдамдық
контурлары бар структуралық модель құрылып, сол контурлар есептеулерінің
нәтижелері көрсетілген.
Реттеуіш негізінде ПИД реттеуіші қолданылатын векторлық басқармалы
«үшдеңгейлі инвертор - асихронды қолзғалтқыш» тұйықталған жүйесі
моделінің құрылымы келтірілген. Matlab ортасында ауыспалы процесстер
зерттеулерінің анализы көрсетілген.
БЖД бөлімінде электр қозғалтқышын пайдалануда техника қауіпсіздігін
сақтау ережелерін қарастырылды. Электр қауіпсіздігін қамтамасыз ету және
жұмыс бөлмесіндегі табиғи жарықтану жүйесіне есептер жүргізілген.
Экономика бөлімінде капитал, амортизациялық және ағымдағы жөндеу
жұмыстарына кететін шығындары есептелген.
5
АННОТАЦИЯ
В дипломной работе выполнен тезисный анализ передовой системы
электрического управления, топология многоуровневых инвенторов
напряжения и их алгоритм управления через широко импульсивную
модуляцию. Доказана эффективность работы импульсной модуляции
пространственных векторов.
Короткое замыкание индукционного ротора машины и математическая
модель неподвижной системы координат - на основе этого создана
компьютерная модель среди ЭВМ. Фундаментом служит необходимость
применения системы векторного управления, создана структурная модель где
есть контуры текущего цикла и скорости, предоставлены результаты расчетов
этих контуров.
Регулировка ПИД -регулятора, используемого векторного управления
''трехуровневый инвентор - асинхронный двигатель'' вызванный в структуре
модели замкнутой системы. Дается анализ исследования переходных
процессов среди Matla b.
В разделе безопасности и жизнедеятельности были рассмотрены
правила техники безопасности при использовании электродвигателя. Были
проведены расчёты по обеспечению электрической безопасности, а также по
системе естественного освещения.
В разделе экономики были проведены расчёты по расходам на ремонт
капитала, амортизации и эксплуатации.
6
ANNOTATION
The research paper made thesis analysis of advanced electrical control
system, multi-level topology of Inventor and voltage control algorithm through the
wide impulsive modulation. The efficiency of pulse modulation work of the space
vector is proved.
Short circuit rotor induction of machines and mathematical model of the fixed
coordinate system - due to this a computer model created among ENIAC.
Foundation is the necessity of vector control system, created a structural model
where the outlines of the current cycle and of speed, there are results of calculations
of these circuits.
Adjusting the PID used vector control ''three-level inverter - induction motor
'' caused by the structure model of a closed system. There are analysis of the study
of transients among Matlab.
In the security and livelihoods sections, there were reviewed safety
regulations while using the electric motor. Calculations were carried out on ensure
the electrical safety as well as on natural lighting system.
In the section of economy was made calculation on the costs for repairing
capital, depreciation and maintenance.
7
Мазмұны
Кіріспе.
11
1
1. 1
1. 2
2
2. 1
2. 2
2. 3
2. 4
2. 5
2. 6
2. 7
3
3. 1
3. 2
4. 1
4. 2
5
5. 1
5. 2
5. 3
6
6. 1
6. 2
Технологиялық бөлім
Көп деңгейлі кернеу инверторларын қарастыру . . .
Көп деңгейлі инверторлар кернеуі үшін, кең импульсты модуляция
әдісі.
Жүйенің «Үш деңгейлі инвертор-асинхронды қозғалтқыштың»
математикалық моделін жетілдіру
Асинхронды машиналардың математикалық сипаттамасы
Қысқа тұйықталған роторы бар асинхронды машиналардың
дифференциалды теңдіктері
Қысқа тұйықталған роторы бар асинхронды қозғалтқышпен
векторлы басқару жүйесін есептеу
Координаттың жылжымайтын жүйесіндегі қозғалтқыштың
математикалық моделі
Кіріспелі конденсатордағы реттеу жұмысын бақылау принципі
Үш деңгейлі инвертор кернеуінің компьютерлік моделі
«Үш деңгейлі инвертор-асинхронды қозғалтқыш» жүйесінің
математикалық моделі
Үш деңгейлі инвертордың және «үш деңгейлі инвертор- асинхронды
қозғалтқыш» жүйесінің математикалық моделін зерттеу
Үш деңгейлі инвертордың математикалық моделін зерттеу
«Үш деңгейлі инвертор-асинхронды қозғалтқыш жүйесінің
компьютерлі- математикалық моделін зерттеу »
Векторлы басқарудың ерекшеліктері мен артықшылықтары
Векторлы басқаруы бар тұйық асинхронды жүйенің құрылымды
сұлбасы
Қоршаған орта және еңбек қорғау бөлімі
Электр қозғалтқышын пайдалануда техника қауіпсіздігін сақтау
ережесі
Электр қауіпсіздігін қамтамасыз етуде есеп жүргізу
Жұмыс бөлмесіндегі табиғи жарықтану жүйесіне есеп жүргізу
Экономикалық бөлім
Қаржы-экономикалық инвестиция тиімділігінің көрсеткіштері . . .
Жобаланатын жүйенің тиімділік есептері
Экономикалық бөлімге қорытынды
Қорытынды
Қолданылған әдебиеттер тізімі . . .
12
13
14
26
27
31
32
37
39
42
53
54
55
. . 6
1
68
69
72
73
77
78
79
80
85
87
88
89
. . .
. . .
. . .
. .
8
. . .
. . .
Қысқартулар
ПӘК - пайдалы әсер коэффициенті
ЭҚК - элетр қозғаушы күш
АҚ - асинхронды қозғалтқыш
ПӘК - пайдалы әсер коэффициенті
КИМ - кең импульсты модуляция
NPC - Neutral point clamped (тіркелген нейтралды нүкте)
FLC - Flying capacitor (түрлендіргіш)
ҚЕСЖ - қауіпсіздік еңбегінің стандарттық жүйесі
ТТ - тиристорлы түрлендіргіш
ЭЖ - электр жетегі
МП - микропроцессор
9
Кіріспе
Асинхронды қозғалтқышы бар электрмеханикалық жүйе басқаруымен
жоғары сапаны алу үшін статикалық және динамикалық режимдерде,
жылдамдықты кең диапазонда реттеу, жылдам тіке қозғалтқыш кезін басқару
мүмкіндігі бар. Әрбір электро қозғалтқыштың кезі әрбір уақыт кезінде
амплитуда және фазамен анықталады: тоқ және магнитті ағын арқылы
анықталады. Тоқтың қысқа тұйықталу роторы, статордың ағын тіркеуі және
ротор қозғалтқышы бар асинхронды қозғалтқыш әртүрлі бұрышты
жылдамдықпен айналады, фазалы параметр уақытында өзгереді және тіке
өлшеу мен басқаруға жатпайды. АҚ ауыспалы басқару қол жетімді болып
құрайтын, магнитті ағын және кездің пайда болатын, тоқ статоры бола алады.
Бұл құрастырғыштардың фазалы бағыты тек ішкі басқару құрылғыларымен
жүзеге асады. Басқа сөзбен айтқанда, АҚ статор тоғының фазасы сияқты,
амплитуданы басқаруын қамтамассыз ету, яғни, «векторлы басқару» термины
сияқты шарттасқан, векторлы шамамен ота жасау. Қазіргі заманауи электро
жетектерінд басқару жүйесіне қозғалтқыштың математикалық модель
салынады, ол белдік кездерін және белдіктің айналым жылдамдығын
есептеуге рұқсат етеді. Сонымен тек қажетті болып, қозғалтқыш статорының
тоқ фазасының реттегіші келеді. Басқару жүйесінің арнайы құрылымының
арқасында тәуелсіз және инерциясыз екі негізгі параметрлерді реттеу
қамтамассыз етіледі- белдіктегі кез және айналым жылдамдығы.
Өткен ғасырдың 71 жылы SIEMENS компаниясымен қозғалтқышпен
векторлы басқару әдісін еңгізу ұсынылды. Бірінші, векторлы басқарулары бар
электрожетектерді қолдану үшін қозғалтқыштар қолданылған, онда ағын
реттегіштері салынған, ұқсас жетектер қолдану аймағын шектеген.
Заманауи электрожетектерінің басқару жүйесінде қозғалтқыштың
математикалық моделі бар, ол айналым жылдамдығын және белдік кезін
есептеуге рұқсат етеді.
Қазіргі күнде, векторлы басқару жүйесінің екі негізгі класы қалыптасқан
- реттегішісіз жүйелер (қозғалтқыш белдігінің жылдамдығының реттегішісіз)
және жылдамдық бойынша қайта байланыс жүйесі қалыптасқан.
Векторлы басқарудың сол немесе басқа әдістерді қолдануымен, электро
жетек қолдану саласымен анықталады. Жылдамдықты шамалы диапазонда
өзгерту кезінде (1:100 кем емес) және оны нақтылықта ұстап отыру талабы
±0, 5% кем емес, реттегішісіз векторлы басқаруды қолданады.
Егер белдік айналымы кең шекте өзгерсе (1:1 дейін) айналым
жылдамдығын жоғары
нақты ұстап отыру талаптары бар
(±0, 02%
дейін, айналым жиілігі 1 Гц аспау қажет) немесе белдіктің позициялау
қажеттігі бар, сонымен қатар қозғалтқыш белдігінің кезін төмен жиілікті
айналымды реттеу үшін, жылдамдық бойынша қайта байланысы бар векторлы
басқару әдісін қолданады.
10
1 Технологиялық бөлім
1. 1
Көп деңгейлі кернеу инверторларын қарастыру
Жоғары кернеулі және қуатты күштік электроникада көп деңгейлі
инверторларды қолданудан бастап, оларға қызуғышылық арта түсуде. Көп
деңгейлі инверторлар орта және жоғарғы кернеулер үшін тартымды.
Көп деңгейлі инверторлар, екі немесе одан көп деңгейде кернеуді
пайдалануын қалыптастырады; демек, екі деңгейін салыстырғанда, шығу
кернеуінің спектры жақсарады.
Көп деңгейлі инверторлардың басты кемшіліктері:
- жартылай өткізгіш құлыптарының көптеген мөлшері қажет;
- құлыптын көптігінен, осындай инверторлармен басқару қиын;
- көп деңгейлі сұлбалар құрамына кіретін, конденсатордағы белгіленген
деңгейде кернеуді ұстап тұру мәселесі туындап отыр.
Бұл кемшіліктерге қарамастан, көп деңгейлі инверторлар жоғары қуатта
қолданылады, өйткені олармен басқару жүйесінің бағасы, қазіргі жағдайда-
барлық жүйенің азғантай бөлігінің бағасы.
Оған қоса, күштік жартылай өткізгіштер мен бағасы төмендеуін
жалғастырады, ол көп деңгейлі түрлендіргішті аз қуатты жүйеде (10 кВт)
қолдануға рұқсат етеді.
Көп деңгейлі сұлбаларда,
жоғары жиілік
ауыстырғыштарда жұмыс жасайтын, төмен вольтты транзисторларды
қолданады. Сонымен қатар, үш деңгейлі түрлендіргіштер 1 кВ төмен
кернеулер үшін қолданылады. Көп деңгейлі түрлендіргіштердің келесі
сұлбалары белгілі: шектелген диодтары бар (diode-clamped converter) немесе
тіркелген нөлдік нүктелері бар (neutral point clamped), «құбылмалы» немесе
«аспалы» конденсаторлары бар (floating-capacitor converter) және каскадты
сұлба (cascade H-bridge converter) . Сонымен қатар, жоғарыда айтылған үш
сұлба базасынан құрастырылған аралас сұлбалар белгілі.
1. 1. 1 Шектелген диодтары бар сұлба
1981 жылы бұл сұлбаны құрастырғаннан бастап, ол қазіргі күнге дейін
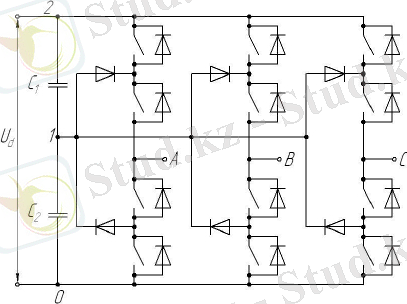
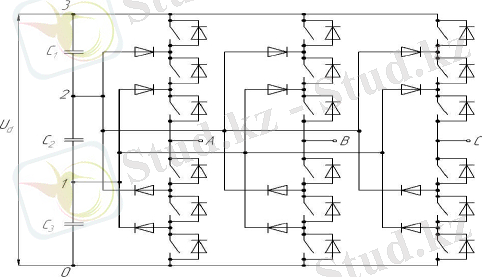
әлемде кең қолданылады (сурет 1) . Бұл сұлба бойынша орындалған
инверторды NPC (neutral point clamped-тіркелген нейтралды нүкте) деп
атайды.
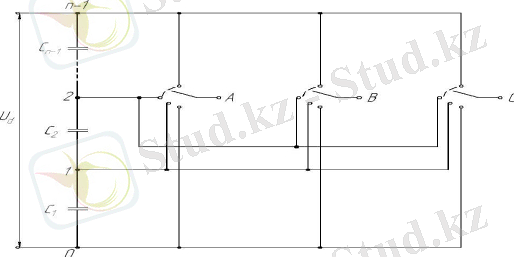
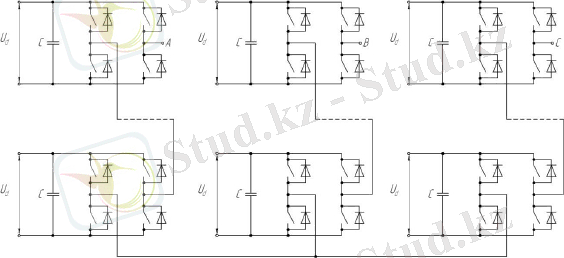
Бұл топология 4 және одан да көп деңгейде таралады. (cурет 2) төрт
деңгейлі инвертор көрсетілген.
11
Сурет 1 - Үш деңгейлі NPC - инвертор
3 суретте көрсетілген сұлбаны, осындай түрлендіргіштің жұмыс
принципін бейнелеу үшін қолдануға болады.
Бір жақтан қарасақ, кілт фазаға жалғанған, ал екінші жағынан әртүрлі
мөлшерлі жалғанған конденсаторлар тізбекті түрде жалғанған. Осылайша, бұл
фазаның соңына 0 нүктесіне қатысты кернеуді салады.
Сурет 2 - Төрт деңгейлі NPC-инвертор
2 суретке қайта ораламыз. Жалпы жағдайда, n- деңгейлі топологияның,
n-1-бір тіректі түрлендіргіштің тізбекті түрде жалғанған кілттері 0 және А, В
немесе С нүктелер арасындағы кернеуді қалыптастыру үшін ашық жағдайда
болу керек. Берілген сұлбада, жабық кілтке салынған кернеу,
конденсаторлардың бір кернеуіне тең екенін көруге болады.
12
Сурет 3 - Түрлендіргіштің жұмыс принципін бейнелеуге арналған
сұлба
Сонымен қатар, 3 суреттегі сұлбадан инвертордың
жалғанған
кілттерінің комбинациясының санын санауға болады:
(1)
Шектелетін диодтары бар сұлба бойынша жасалған түрлендіргіштің
ерекшеліктері:
- басқа сұлбаларға қарағанда аз қолданылады, конденсаторлар мөлшері,
түрлендіргіш бағасына әсер етеді;
- тұрақты тоқ көзіне жалғанады.
Кемшіліктері:
- деңгейлік саны үш есе үлкен сұлбалар үшін, шектелетін диодтарға
. Кернеу қойылады. Нәтижесінде, бірнеше диодтарды тізбекті түрде
жалғау қажет. ;
- модуляция үлкен тереңдік кезінде, кіріспелі конденсаторларда төмен
жиілі пульсациялар пайда болады, осыдан, жартылай өткізгіш құралдарға
салынған кернеу көбейеді.
1. 1. 2 «Құбылмалы» (аспалы) конденсаторлар сұлбасы
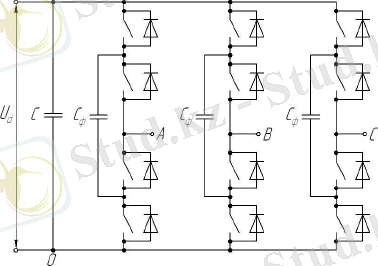
4 суретте үш деңгейлі инвертордың сұлбасы көрсетілген. Сонымен
қатар, мұндай түрлендіргішті FLC (flying capacitor) деп атайды.
13


Сурет 4 -Үш деңгейлі FLC- түрлендіргіш
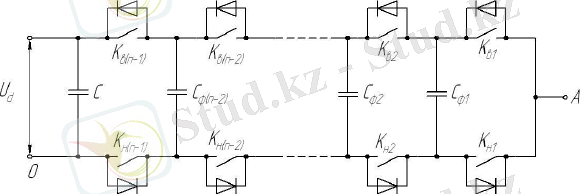
Мұндай сұлбадағы әрбір тірек, бөлек ұяшық сияқты қарастырылу
мүмкін, ондағы А, В, С және 0 нүктелер арасындағы кернеулер анықталған,
тізбекті жалғанған конденсаторлар саны арқылы қалыптасады (5 сурет) .
Сурет 5 - FLC-түрлендіргіш иіні
Кілттің бір сыңары Квi және Кнi А нүктесіндегі потенциалды алу үшін,
ашық болу керек. Демек, бір уақытта кілттің екеуіде ашық бола алмайды,
өйткені қысқа тұйықталу болуы мүмкін. 1 кесте, үш деңгейлі инверторға
арналған барлық кілттің жағдайын көрсетеді.
1 Кесте
Кестеден көріп тұрғандай, қосылған кілттердің комбинациясынан бірдей
шығатын кернеу қалыптасады. Бұл қасиеттің арқасында, басқару алгоритмін
14
сәйкес қолданып, конденсаторлардағы кернеу теңдігін ұстап тұруға болады.
Мысалы, үш деңгейлік инвертор жағдайы үшін, конденсатор кернеуіне
әсер ететін, тек екі комбинация бар, және ол екеуі Ud/2 кернеуін
қалыптастырады. Бірақ тоқ конденсатор арқылы әртүрлі бағытта ағатын
болады. Демек, қосылған кілттердің қажетті комбинациясын таңдап,
конденсатордағы кернеу теңдігін бақылап отыруға болады.
Қорытынды:
- әрбір тірек басқаларға қарағанда тәуелсіз қарастырылу қажет. Бұл
түрлендіргіш пен шектелетін диодтарға қарағанда, көрінетін айырмашылық,
онда конденсаторлардағы кернеуді дұрыстау үшін барлық үш фазалы
жүйесіндегі үрдістерді қарастыру қажет;
- бұл түрлендіргіштер, шығатын бірдей кернеуді қалыптастыратын, бір
қалыпты жағдайдын арқасында конденсаторлардағы кернеуді бақылай алады.
Бірақ, үш деңгейлік саннан асқан түрлендіргіштер ауыстырғыш жиілігін
жоғарлатады, өйткені конденсаторлардағы кернеуді жақсы бақылау үшін,
шығатын жердегі бірдей кернеуді қалыптастыратын, барлық
комбинацияларды қолдану қажет.
-
алдынғы пунктте айтылғандай, мұндай түрлендіргіш, NPC-
түрлендіргішпен салыстырғанда ауыстыру үшін үлкен шығында.
Тағы да көрінетін кемшілік - түрлендіргіш бағасын жоғарлататын,
конденсаторлардың көп мөлшері.
1. 1. 3 Каскадты H-bridge сұлба
Бірінен соң жалғанған бір фазалы көпірлі инвертоларды алғаш рет
қолдану, 1988 жылы плазманы орнына келтіру үшін қолданған [7] . Содан соң,
мұндай жалғайтын сұлбалар үш фазалық жүктемені қоректендіру үшін
қолданылған.
Каскадты түрлендіргіште қолданылған, базалық үш фазалы құрылым, 6
суретте көрсетілген.
Сурет 6 -H-bridge базасындағы, үш фазалы базалы құрылымындағы
сұлбалар
Әрбір фаза үшін мынадай ұяшықтарды бірінен соң жалғау, үлкен
деңгейлік саны бар түрлендіргіш пайда болады. (сурет7)
H-bridge ұяшығы үш деңгейлі түрлендіргіш болып табылады, өйткені, 0
жалпы нүктесіне қатысты және бір фазаның соңымен Ud, - Ud кернеуі және
нөлдік кернеу қалыптасады.
15

Сурет 7 - Көп деңгейлі түрлендіргіш
Ерекшеліктері:
- бұл топологияның модуляциясы маңызды ерекшелігі болып табылады.
Кемшіліктері:
- әрбір ұяшық үшін, тұрақты тоқтың дара қоректендіру көзі қажет;
1. 1. 4 NPC-түрлендіргіштің каскадты жалғануы
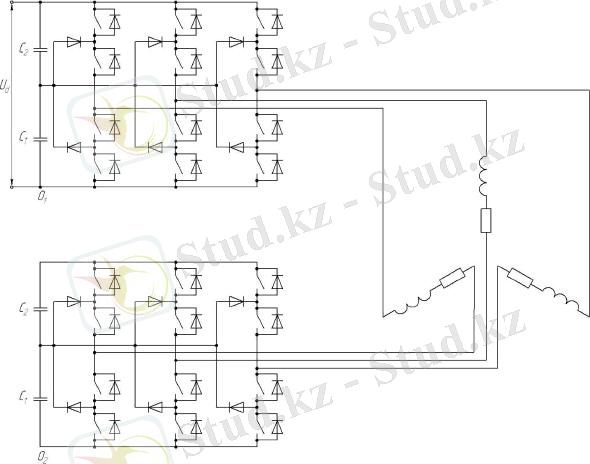
8 суретте каскадты 3/3 инверторы көрсетілген. Екі үш деңгейлі инвертор
қолданылады. Алғаш рет мынадай сұлба 1993 жылы ұсынылған. Бірақ, әрбір
түрлендіргіште, өзіндік тұрақты тоқ көзі бар, онда шыққыш кернеулер тең
болып келеді. Осындай түрлендіргіш, бес деңгейлі сияқты жұмыс жасаған.
Бірнеше жылдан кейін, бір үш деңгейлі және бір екі деңгейлі
инверторлар ұсынылған. Үш деңгейлі инвертор, тұрақты тоқ көзімен
қоректенген, ал екі деңгейлі - конденсаторлардан қоректенген.
Бірінші инвертордың қоректену кернеуі екіншінің қоректену кернеуінен
екі есе көп. Осындай түрлендіргіш төрт деңгейлі сияқты жұмыс жасаған.
Егер қоректену кернеуі төрт есе көп болса, онда мынадай түрлендіргіш алты
деңгейлі сияқты жұмыс жасайды. Содан кейін екі үш деңгейлі NPC-
түрлендіргіштің сұлбасын ұсынады, онда бір инвертор тұрақты тоқ көзімен
қоректенген, ал екіншісі - конденсаторлардан қоректенген.
16
Сурет 8 - Каскадты 3/3 NPC-инвертор
Бұл сұлбада жоғарғы инвертор жоғары вольтты төмен жиілікті сияқты,
ал төменгі - төмен вольтты жоғары жиілікті сияқты жұмыс жасайды.
Артықшылығы:
- кілттің шамалы мөлшерде қатыстығы кезінде, шығатын кернеудің көп
деңгей шамасында алуға болады. ;
Кемшіліктері:
- басқару жүйесінің қиындығы;
- аз қуатты кезінде, қолдануға тиімді емес;
- жүктемеде ыдыраған нейтралды нүкте қажет.
1. 1. 5 H-bridge көп деңгейлі ұяшықтарының каскадты жалғануы
9 суретте мынадай инвертордың бір фазасы көрсетілген. Мынадай
сұлбада, H-bridge бесінші деңгейлі ұяшық және H-bridge үш деңгейлі ұяшығы
бірінен соң бірі жалғанған.
17
Сурет 9 - Каскадты 5/3H инвертор
Мынадай сұлбада, тұрақты тоқтың Ud1 және Ud2 кернеу көзінің ара
қатынастығын өзгерте, шығатын кернеудің әртүрлі деңгей мөлшерін алуға
болады. Егер Ud1 = 6Ud2 тең болса, онда он бес деңгей алуға болады.
Ерекшелігі:
- кілттің шамалы мөлшерде қатыстығы кезінде, шығатын кернеудің көп
деңгейде алуға болады. ;
Кемшіліктері:
- басқару жүйесінің қиындығы;
- аз қуатты кезінде, қолдануға тиімді емес;
- инвертордың бір фазасы үшін тұрақты тоқтың екі бөлек қоректену көзі
қажет.
1. 1. 6 Каскадты NPC/H-bridge инвертор
10 суретте мынадай инвертор көрсетілген. Бір үш деңгейлі NPC-
инвертор және үш бес деңгейлі H-bridge ұяшығы қолданылады. Осында,
келесі ара қатынастықта шығатын кернеудің он бес деңгейі пайда болу
мүмкін:
18
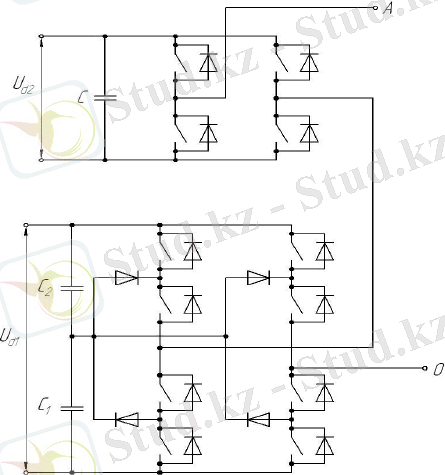

Сурет 10 - Каскадты NPC/H-bridge инвертор
Ерекшелігі:
- кілттің шамалы мөлшерде қатыстығы кезінде, шығатын кернеудің көп
деңгейде алуға болады. ;
Кемшіліктері:
- басқару жүйесінің қиындығы;
- аз қуатты кезінде, қолдануға тиімді емес;
- инвертордың бір фазасы үшін тұрақты тоқтың екі бөлек қоректену көзі
қажет.
1. 2
Көп деңгейлі инверторлар кернеуі үшін, кең импульсты
модуляция әдісі
Қазіргі таңда,
кең
импульсты модуляцияның синусоидалық
... жалғасыСіз бұл жұмысты біздің қосымшамыз арқылы толығымен тегін көре аласыз.
- Іс жүргізу
- Автоматтандыру, Техника
- Алғашқы әскери дайындық
- Астрономия
- Ауыл шаруашылығы
- Банк ісі
- Бизнесті бағалау
- Биология
- Бухгалтерлік іс
- Валеология
- Ветеринария
- География
- Геология, Геофизика, Геодезия
- Дін
- Ет, сүт, шарап өнімдері
- Жалпы тарих
- Жер кадастрі, Жылжымайтын мүлік
- Журналистика
- Информатика
- Кеден ісі
- Маркетинг
- Математика, Геометрия
- Медицина
- Мемлекеттік басқару
- Менеджмент
- Мұнай, Газ
- Мұрағат ісі
- Мәдениеттану
- ОБЖ (Основы безопасности жизнедеятельности)
- Педагогика
- Полиграфия
- Психология
- Салық
- Саясаттану
- Сақтандыру
- Сертификаттау, стандарттау
- Социология, Демография
- Спорт
- Статистика
- Тілтану, Филология
- Тарихи тұлғалар
- Тау-кен ісі
- Транспорт
- Туризм
- Физика
- Философия
- Халықаралық қатынастар
- Химия
- Экология, Қоршаған ортаны қорғау
- Экономика
- Экономикалық география
- Электротехника
- Қазақстан тарихы
- Қаржы
- Құрылыс
- Құқық, Криминалистика
- Әдебиет
- Өнер, музыка
- Өнеркәсіп, Өндіріс
Қазақ тілінде жазылған рефераттар, курстық жұмыстар, дипломдық жұмыстар бойынша біздің қор #1 болып табылады.

Ақпарат
Қосымша
Email: info@stud.kz