Көтергіш кранның электр жетегін таңдау және Matlab/Simulink-та реверсивті тиристорлы түрлендіргішпен модельдеу

9
10
11
12
Аңдатпа
Жобада көтергіш кранның электр жетегінің сұлбасын таңдау қарастырылған және
де қуаты 7, 5 кВт тәуелсіз қозатын тұрақты тоқ 2ПФ160МУХЛ4 қозғалтқышы таңдалған. Ол
кернеу мен қызу шарттарына тексерілді. Техникалық талаптарға сай және қозғалтқыш
қуатын ескере отырып реверсивті тиристорлы түрлендіргішімен үш фазалы көпірлік
сұлбасы таңдалды.
Matlab 7. 0 программасында ТТ-ТТҚ сұлбасына сай көтергіш кран механизмінің
электр жетегінің матиматикалық моделі жасалған. Және оның виртуалды моделі
көрсетілген. Оның жұмысқа бейімділігі, техникалық процесс талатарына сай көрсетілген.
Жобада тіршілікті қорғау негіздері және жобаның техника-эконмикалық негіздемесі
келтірілген.
Аннотация
В работе рассмотрен выбор схемы электропривода подъемного механизма крана. А
так же выбран и проверен двигатель постоянного тока с независимым возбуждением
2ПФ160МУХЛ4 мощностью 7, 5 кВт, который был проверен по условиям нагрева и
допустимой перегрузке. В соответствии с техническими требованиями и мощностью
двигателя выбрана трехфазная мостовая схема реверсивного тиристорного преобразователя
и рассчитаны параметры её силовых элементов.
Разработана математическая модель и соответствующая ей виртуальная модель
предлагаемого электропривода подъемного механизма крана по схеме ТП-ДПТ,
исследование которой в среде визуального программирования Simulink математического
пакета Matlab 7. 0 показали её работоспособность и соответствие требованиям
технологического процесса.
В работе рассмотрены вопросы по обеспечению безопасности и жизнедеятельности,
приведено техника - экономическое обоснование проекта.
Annotation
The paper considers the selection scheme of the electric hoist crane. As well as selected
and tested DC motor with independent excitation 2ПФ160МУХЛ4 7. 5 kW that has been tested
under the terms of heating and Overload. In accordance with the specifications and capacity of the
engine chosen three-phase bridge circuit reversible thyristor converter and calculated parameters
of its power components.
The mathematical model and the corresponding virtual models offer electric hoist crane
scheme DC motor, whose research in the visual programming environment Simulink
mathematical package Matlab 7. 0 showed its efficiency and compliance process.
The paper discusses the issues of security and livelihoods, given techno - economic study
of the project.
13
Мазмұны
Кіріспе
1 Электр жетегінің сұлбасын таңдау және оның элементтерін есептеу Тапсырманы жобалауға
дайындау
1. 1 Кранның көтергіш механизімінің электр жетегі және оған қойылатын талаптар. Сұлбаны
таңдау
1. 2 Кернеу диаграммаларын есептеу және қозғалтқыш таңдау
1. 3 Сұлбаны таңдау және күш турлендіргіштерінің элементтерін есептеу
1. 3. 1 Күш трансформаторын таңдау
1. 3. 2 Теристорларды таңдау
1. 3. 3 Дроссель индуктивтілігін таңдау
1. 3. 4 ТӨ-Қ электр тізбегінің есептік параметрлерін табу
1. 4 Бөлім бойынша қорытынды және тапсырманы жобалауға дайындау
2 Электр жетегі жүйесін құрастыру
2. 1 Ашық тізбекте сатикалық сипаттарын құрастырып оны есептеу
2. 2 Электр жетегінің жабық тізбегінің құрылымын таңдау, параматірлерін есептеу.
2. 2. 1 Тұйықталу тоғын есептеу
2. 2. 2 Тұйықталу жылдамдығын есептеу
2. 3 Жабық жүйенің статикалық сипаттарын құрастырып оны есептеу
2. 4 Электр жетегін басқару сұлбасын құру
2. 5 Бөлім бойынша қорытынды
9
10
10
11
16
16
17
18
19
20
21
21
25
26
28
30
30
33
3
3 Электр жетегінің энергетикалық корсеткіштерін есептеу
3. 1 Цикл аралықтағы қозғалтқыштың анық кернеу диаграммасын құру
3. 2 Цикл аралықтағы электр жетегінің интегралды энергетикалық корсеткіштерін есептеу
3. 3 Бөлім бойынша қорытынды
4. Жабық тізбектің динамикалық қасиетін таладау
4. 1 Электр қозғалтқыштың матиматикалық және вертуалды үлгісы
4. 2 Нөлдік сұлбамен қатар басқарылатын реверсивті үш фазалық теристордің
түрлендіргішінің математикалық және вертуалды үлгісі
4. 3 Нөлдік қосылу сұлбасымен басқарылатын реверсивті үш фазалық теристордің
түрлендіргішінің математикалық және вертуалды үлгісі
4. 4 Бөлім бойынша қорытынды
5 Өмірлік қауыпсіздігі
6 Техникалық - экономикалық негізделу
Қорытынды
Қолданылған әдебиеттер
Қосымша
14
34
34
36
36
36
44
45
49
50
62
72
73
74
Кіріспе
Қазіргі заманғы өндірістік процестердің алуандығын ескере отырып,
әрбір өндірістің түрлі операцияларын қарастырса болады. Бұларға шикізат
пен жартылай дайын өнімді жұмыс орнына, яғни өңделетін жерге жеткізу
және өнімді оңдеу барысындағы оның тасмалдануы. Қоймалардағы, темір
жол станцияларындағы және т. б жерлердегі жүктеу және қабылдау
жұмыстары жатады.
Тиеу - түсіру жұмыстарындағы еңбек шығынын қысқарту үшін
тасымалдауды және көлік
құралдарын таңдауды
ұтымды
ұйымдастыру аса маңызды. Құрылыстың дамуы және заводтық
құрылыс конструкцияларын және бөлшектерін дайындау дәрежесінің
ұлғаюы оларды құрылыс алаңдарына жеткізу механизациясы мен
ұйымдастырылуын жетілдіруді талап етті. Осындай операцияларды
орындау механизімі ортақ болғандықтан, оларды жалпы өндірістік
механизм деп атайды. Жалпы өндірістік механизм
Мемлекет
экономикасында маңызды рөл атқарады.
Өнеркәсіп орындары ең көп таралған және әмбебап құралңы
көтергіш кран болып табылады. Және оның негізгі механизімі жеке электр
жетегімен жабдықталған көтеру механизімі.
Мұндай нысандардың негізгі механизмдері әдетте қысқа уақытта
бұрылу режимінде жұмыс істеу үшін арналған реверсивті электр жетегі
бар. Әрбір жұмыс циклында электр жетегінің орнықпаған жұмыс режимі
бар. Олар: қозңлыстар, реверстер, тежеулер және де нысан ПӘК-не алуан
әсер ететін факторлар. Бұның бәрі жұмыс механизімінің сапасына, жұмыс
уақытана зор ықпал тигізеді. Осы жағдайлардың барлығы электр жетегінің
сенімділігі мен қауіпсіздігін қамтамасыз ету талаптары жүктеледі. Электр
жетегінің техникалық тұрғыда заманауй түрде жұмыс істеуі өнімділікке
ықпал тигізеді, және сенімділікті арттырып, техникалық қызмет көрсетуді
жеңілдетеді. Кран жұмысшыларды физикалық ауыр жұмыстарға тәуелді
болмауға мүмкіндік береді.
Бұл
жұмыста электр жетегі
жалпы өндірістік механизмда
қолданатын кранның көтергіш механизіміні қарастырылады. Жұмыстың
мақсаты жүк көтергіш кран белгілі бір электр өндіру механизмін жобалап
есептерді шешу арқылы электр жетегі саласындағы теорияды білімді
арттыру болып табылады. нығайту тереңдету және білім синтезі болып
табылады. Жұмыста: электр жетегінің сұлбасын таңдау, басқару жүйесін
дамыту, ашық және жабық цикл жүйесінің динамикалық қасиеттерін
талдау,
электр жетегінің
энергетикалық
параметірлерін
есептеу
қарастырылған. Тоқ пен жылдамдық координаттарын реттеу мәселесіне
ерекше көңіл бөлінген.
15
1. Электр жетегінің сұлбасын таңдау және оның элементтерін
есептеу. Тапсырманы жобалауға дайындау .
1. 1. Кранның көтергіш механизімінің электр жетегі және оған
қойылатын талаптар. Сұлбаны таңдау
Берілгені:
Көтергіштігі, кг
Ұстау құрылғысы массасы, кг
Барабан диаметрі, мм
Редукторлар саны
Полиспаст еселігі
Берілу ПӘК-і %
Көтеру жылдамдығы, м/мин
Көтеру биікткгі, м
Механизм қосылу ұзақтығы %
3000
25
490
85
1
0, 8
25
12
15
Электр жетегі жүйесі: ТТ-Қ жүйесі бойынша тұрақты тоқ электр
жетігі. Қосылу және тежеу өзгерткіштің Э. Қ. К уақыт функциясындағы
желілік озгерістері кезінде іске асады.
Кран электр жетегін құрған кезде оның сипаттамасына қатысты осы
шарттар қадағалануы тиіс:
- көтеру түсіру кезіндегі валдағы статикалық моментте берілген
механизмның жұмыс жылдамдығын қалыпты ұстауы;
- реверстеу қасиеті;
- өту процессінің уақытын минималдандыруы;
- қосылу мен реттеудің тегістігі;
- моменттің максималды корсетішін Мтоқт. белгісімен шектеуі;
Автоматты түрде реттеуді қамтамасыз ету үшін басқарылатын
өзгерткіштер мен реттегіштер қолданылады. Ол автаматты түрде электр
жетегінің координаттарын реттеуге мүмкіндік береді. Біздің жағдайда
жылдамдығы мен моменті. Электр машиналы және басқарылатын кернеудің
тұрақты тоғы мен айнымалы тоқтың жиілігінің ветильді өзгерткіштері
кеңінен қолданылады.
ЭЖ жүйесіне сай: генератор - қозғалтқыш жүйесі
(Г-Қ) ; тиристорлы өзгеркіш - қозғалтқыш жүйесі (ТТ-Қ) ; жиіліктің
өзгерткіші- асинхронды қозғалтқыш жүйесі (ЖТ-АҚ) . Және де жылдамдық
пен моментті реостатты реттеу арқылы өзгертсе болады. Реттеудің тиімді
тәсілін таңдау өте маңызды болып табылады. Және ол электр жетегін
жобалау кезінде анықталады.
Айтылып кеткен барлық жүйелердің артықшылығы мен кемшілікетері
бар. Техникалық талаптар мен жұмыс істеу механизмінің қасиетіне сай
дұрыс басқару жүйесі таңдалады.
Кзіргі таңда Г-Қ жүйесі кеңінен қолданып келеді. Оның басты
ерекшелігі қолданылатын тоқтың түзулігі мен реактивті қуаттың аз
16
қолдануы болып табылады.
Қозғау тоғын реттеу жолымен өзгертілген
агретта синхронды қозғалтқышты қолдану кезінде, басқа құрылғылармен
тұтынылатын реактивті қуат өтемі үшін жұмысты cosϕ ЭЖ қамтуға
болады.
Өкінішке орай, Г-Қ жүйесіне энергияның үш мәрте
электромеханикалық қайта тудыруымен анықталатын бірнеше кемшіліктер
тән. Салдары ретінде - төмен массагабаритті және энергетикалық
көрсеткіштер, және қолайлы реттеуіштік мүмкіндіктер мыс, жоғары сапалы
болаты және еңбек тапшылығының негізгі шығыны құнымен қолжетімді.
Бұған қоса, жүйенің ПӘК төмен сипатқа ие.
Асинхронды қозғалтқыштың негізгі артықшылықтары ЖТ-АҚ
жүйесінің күдіксіз келешегін анықтайды. Әйткенмен, энергияны қайта
тудыруға қосымша сатыларды қажет
ететіндіктен, жиілікті реттеу
түзетілген тоқты реттеуден гөрі техникалық анағұрлым қиын тапсырма
болып табылады. ЖТ-АҚ жүйесінің пайдалы әрекет коэффициенті ТТ-Қ
жүйесіне қарағанда төменірек, тез әрекет етуі және үнемділігі төменірек.
Реостатты реттеу әдісін қарастыра отырып, оның реттеу дәлдігінің
және ауқымының төмендігін, жоғары емес қалыптылығын, сонымен қатар,
массагабаритті көрсеткіштері (байланыс аппаратурасының
резисторларының болуы) және реттеу ауқымын арттырған кезде ПӘК
төмендуін айтпай кетуге болмас. Әйткенмен осы әдіс өзінің
қарапайымдылығымен және іске асыруға қажетті көп емес шығындарымен
тартымды.
Шығару жұмысында ТТ-Қ жүйесі бойынша тұрақты тоқтың электр
жетегі жасалады. Осы жүйе қазіргі уақытта оның күдіксіз артықшылықтары
арқасында анағұрлым кең пайдаланылады. Ол анағұрлым үнемді, жоғары
тез әрекет етуге ие (уақытқа тұрақты Тп шала өткізгішті СИФУ 0, 001 с -дан
аспайды), өте жоғары ПӘК ие. Номиналды тоқ ағымында тиристорлардағы
энергияны жоғалту жетектің номиналды қуатының 1-2%-ын ғана құрайды.
Тиристорлы өзгерткіштің кемшілігі кең ауқымда өзгеріп отыратын
cosϕ≈cosα, және жүйеден тұтынылған тоқ формасының айтарлықтай
өзгеруі болып табылады.
Өзгерткіштің көпірлі реверсивті келісілген басқармамен бірлескен
сызбасын таңдаймыз.
1. 2 Кернеу диаграммаларын есептеу және қозғалтқыш таңдау.
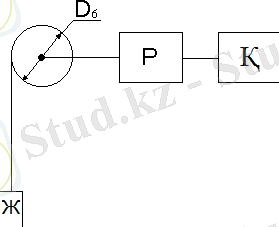
Көтергенде және түсіргендегі статикалық моменттер (1. 1 сурет ) :
М сп =
( mг р + m з п ) ⋅ g ⋅ Rб
η ⋅ i р ⋅ iп
=
(3000 + 25) ⋅ 9. 81 ⋅ 0. 245
0. 8 ⋅ 85 ⋅ 1
= 106. 918 Нм,
(1. 1)
17
М сc =
( mг р + m з п ) ⋅ g ⋅ Rб ⋅ η
i р ⋅ iп
=
(3000 + 25) ⋅ 9. 81 ⋅ 0. 245 ⋅ 0. 8
85 ⋅ 1
= 68. 428 Нм. (1. 2)
мұндағы: g - тәуелсіз түсудің үдеуі,
mгр, mзп - жүк және ұстау құрылғысының массасы,
Rб - жүкарба барабанының радиусы,
iр - редуктор саны,
iп - полиспаст саны,
η - беріліс ПӘК.
Сурет 1. 1- Механизмнің кинематикалық сұлбасы
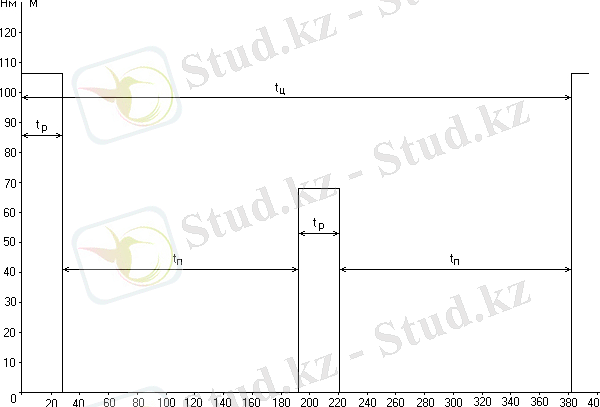
Цикл уақыты:
tц=tпод+tсп+2tп=tр+tп,
мұндағы:
tпод -көтеру уақыты,
tсп - түсіру уақыты,
tп - тоқтау уақыты,
tр - жұмыс уақыты
tпод=tсп=h/v=12/(25/60) =12/0, 417=28, 777 с,
мұндағы: h - көтеру биіктігі,
v - көтеру жылдамдығы.
Қосылу ұзақтығы:
ПВ= tр/tц
яғни:
18
(1. 3)
(1. 4)
tц= tр/ПВ=57, 554/0, 15=383, 693 с.
tп=0, 5(tц- tр) =0, 5(83, 693-57, 554) =163, 07 с.
Сурет 1. 2 - Өндіріс механизмінің кернеу диаграммасы
Қозғалтқыш S1 режимінен таңдалады деп ойлап, жұмыс циклындығы
эквивалентті момент:
М экв
=
М сп 2 ⋅ tп о д + М сс 2 ⋅ tсп
tц
=
106, 918 2 ⋅ 28, 777 + 68, 428 2 ⋅ 28, 777
383, 693
= 34, 764 Нм.
(1. 5)
Қозғалтқыштың бұрыштық жылдамдығы, V=12 м/мин:
ω =
Vп о д ⋅ i p ⋅ iп
Rб
=
0, 417 ⋅ 85 ⋅ 1
0, 245
= 144, 673 1/с.
(1. 6)
Қозғалтқыштың номиналды қуаты:
Pэкв = М экв ⋅ ω расч ⋅ k з = 34, 764 ⋅ 144, 673 ⋅ 1, 3 = 6, 538 кВт,
19
(1. 7)
мұндағы: kз=1, 3 - механизмнің кернеулік диаграммасын
қозғалтқыштың кернеулік диаграммасынан айыратын коэффициент.
Қозғалтқыш таңдау шарты:
Рн≥Рэкв и ωн≈ωесеп тәуелсіз қозатын тұрақты тоқ қозғалтқышын
таңдаймыз 2ПФ160МУХЛ4.
Р=7, 5 кВт; U=220 В; n=1500 айн/мин; nmax=4200 айн/мин; ПӘК=83%;
Rб=0. 145 Ом; Rқос=0, 101 Ом; Rв=53, 1 Ом; Lя=4 мГн; Jдв=0, 083 кг*м2; оқшау
классы- В.
Кернеулік диаграммасын тұрғызған соң оны қыздыру және шектеулі
кернеу арқылы тексереміз.
Инерцияның толық моменті:
JΣ=1, 2Jдв+Jмех=1, 2*0, 083+0, 025=0, 1246 кг*м2,
мұндағы: Jмех - механизм инерциясының моменті.
(1. 7)
2
mRб 2
i p 2 ⋅ iп 2
=
(3000 + 25) ⋅ 0, 245 2
2 2
2
(1. 8)
Динамикалық момент:
М дин = 2, 5 М ном − М сп = 2, 5 ⋅ 47, 747 − 106, 918 = 12, 448 Нм,
мұндағы: Мном - қозғалтқыштың номиналды моменті.
(1. 9)
М ном =
Рном
ω ном
=
Рно м ⋅ 30
π ⋅ nном
=
7500 ⋅ 30
3, 14 ⋅ 1500
= 47, 747 Нм.
(1. 10)
Бұрыштық үдеу:
ε =
d ω
dt
=
М дин
J Σ
=
12. 448
0. 1246
2
(1. 11)
Жетегтің үдеумен істеген уақыты:
t 1 =
ω р а сч
ε
=
144, 673
99, 906
= 1, 448 с.
(1. 12)
Үдеу уақытында жүктің котерілген уақыты:
S 11 =
Vко н − Vна ч
2
⋅ t =
0. 417 − 0
2
⋅ 1. 448 = 0. 302 м.
(1. 13)
20
Жүктің үдеусіз өтетін ара қашықтығы:
h 1 = h − 2 S 11 = 12 − 2 ⋅ 0. 302 = 11. 396 м.
Жтегтің үдеусіз жұмыс уақыты:
(1. 14)
1
h 1
V
=
11. 396
0. 417
= 27. 329 с.
(1. 15)
Цикл уақыты, үдеуді ескергенде:
t ц = 2(2 t 1 + t 1 + t паузы ) = 2(2 ⋅ 1, 448 + 27, 329 + 326, 139) = 386, 59 с.
(1. 16)
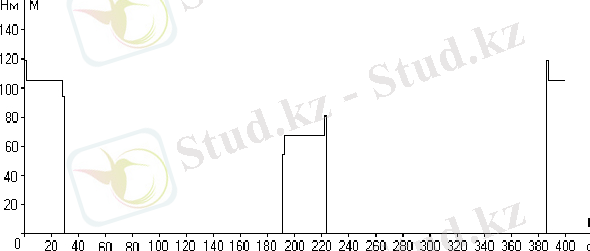
Сурет 1. 3 - Қозғалтқыштың жүктеу диаграммасы
Диаграмма арқылы экфифалентті моменттің жаңа мәнін табамыз:
М экв =
( М сп + М дин ) 2 ⋅ t1 + M c 2 п ⋅ t 1 + ( M сп − М дин ) 2 ⋅ t1 + ( М сс + М дин ) 2 ⋅ t1 + М сс 2 ⋅ t 1 + ( М сс − М дин ) 2 ⋅ t 1
t ц
,
М экв =
119, 37 2 ⋅1, 45 +106, 92 2 ⋅ 27, 39 + 94, 47 2 ⋅1, 45 + 55, 98 2 ⋅1, 45 + 68, 43 2 ⋅ 27, 39 + 80, 88 2 ⋅1, 45
386, 59
= 35, 53 Нм.
Мэкв=35, 53<Мн;
Мmax≤2. 5*Мн=2, 5*47, 748=119, 37.
Таңдалған қозғалтқыш шекті қызуы мен жүктемесі қанағатандырады
21
1. 3 Сұлбаны таңдау және күш турлендіргіштерінің элементтерін
есептеу
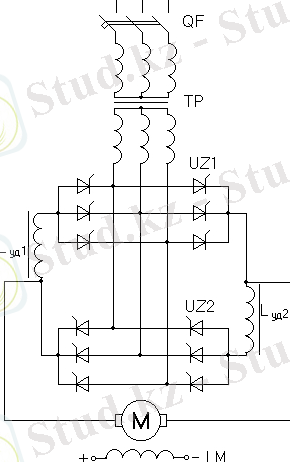
Бұл жағдайға уш фазалы көпір сұлбасын таңдаймыз. Сұлба 1. 4
суретте көрсетілген.
Сурет 1. 4 - Көпірлі реверсивті сұлба
1. 3. 1 Күш трансформаторын таңдау тоқтың есептік мәндеріне I1және
I2, кернеуге U2 және типтік қуаттылыққа Sтр қарай іске асырылады.
Үздіксіз тоқтар аймағындағы қозғалтқыш якорьіне жүктемелі m-
фазалы ТП-сы бартрансформатордың екінші реттік орамы кернеуінің
есептік мәні U2ф, күш бөлігіндегі кернеудің құлауына қажетті қорды қоса
есептегенде, мына формуламен анықталады:
U 2 ф . расч = k u k c k α k R U d = 0. 461⋅1. 1⋅1. 1⋅1. 05 ⋅ 220 = 128. 854 В,
(1. 17)
мұндағы ku=0, 461-нақты түзеткіштегі
U2ф/Ud0сипаттайтын коэффициент;
22
кернеулер
қатынасын
kc=1, 1 - жүйедегі кернеудің төмендеу ықтималдылығын есепке
алатын, кернеу жөніндегі қор коэффициенті;
kα=1, 1 - максималды басқару дабылы кезінде вентильдердің толық
емес ашылуын есепке алатын қор коэффициенті;
kR=1, 05 - трансформатор орамдарындағы, вентильдердегі және
анодтардың жабылуынан болатын кернеудің құлауын есепке алатын кернеу
жөніндегі қор коэффициенті;
Ud=220 В - қозғалтқыштың номиналды кернеуі.
Екінші реттік орам тоғының есептік мәні:
I 2 расч = k I k i I d = 0. 815 ⋅ 1. 1 ⋅ 41. 073 = 36. 822 А,
(1. 18)
мұндағы: kI=0, 815 - идеалды сызбадағы тоқтар қатынасын
I2ф/Idсипаттайтын сызба коэффициенті;
ki=1, 1 - вентильдер анодты тоғының формасының тікбұрыштан
ауытқуын есепке алатын коэффициент;
Id - қозғалтқыштың номиналды тоғының мәні.
I d =
Pн
η ⋅ U н
=
7500
0, 83 ⋅ 220
= 41, 073 А.
(1. 19)
Күш трансформаторының есептік типтік қуаттылығы:
S тр = k s k α k iU d I d ⋅ 10 − 3 = 1, 065 ⋅ 1, 1 ⋅ 1, 1 ⋅ 220 ⋅ 41, 073 ⋅ 10 − 3 = 11, 644 кВА,
(1. 20)
мұндағы: ks=1, 065 - нақты түзеткіш үшін противо-ЭДС -ке жүктемелі
қуаттылықтар қатынасын Sтр/UdIdсипаттайтын сызба коэффициенті.
Келесі жағдайларды қанағаттандыратын күш трансформаторын
таңдаймыз:
Sн≥11, 644 кВА; U2фн≥128, 854 В; I2фн≥36, 822 А.
ТС-16трансформаторын таңдаймыз.
Оның сипаттамасы:
Бірінші реттік орам тоғының есептік мәні:
Sн=16 кВА; U1нл=380±5% В; U2нл=230-133 В; Р0=213 Вт; Рк=529 В;
Uк=4, 6% Y/Y0-∆.
Трансформация коэффиценті:
k тр = 0, 95
U 1нл
U 2нл
= 0, 95
380
230
= 1, 57 .
(1. 21)
Бастапқы ораманың тоғын есептеу:
23
I 1 расч = I 1 н =
I 2 р а сч
k тр
=
36, 822
1, 57
= 23, 45 А.
(1. 22)
1. 3. 2 Тиристорларды таңдау
Тиристор тоғының орташа мәні келесі формуламен анықталады
I dсс = k зi
I d
k oxmтр
= 2, 5
41, 073
0, 35 ⋅ 3
= 97, 793 А,
(1. 23)
мұндағы kзi=2, 5 - тоқ жөніндегі қор коэффициенті;
kох - күш вентилінің суу қарқындылығын
коэффициент. Табиғи суу кезінде kох=0, 35;
mтр=3 - трансформатор фазаларының саны.
Кері кернеудің максималды шамасы:
U B max = k зн kUообU d 0 = 1. 8 ⋅ 1. 065 ⋅ 279. 51 = 535. 82 В,
есепке
алатын
(1. 24)
мұндағы: kзн=1, 8 - жүйеге қуат беретін кернеудің арту
ықтималдылығын есепке алатын (бос жүріс режимін қоса) кернеу жөніндегі
қор коэффициенті және вентильдер коммутациясы процесімен болатын
периодты;
kUобр=1, 065 - түзетудің көпірлі реверсивті сызбасына
арналғанкернеулер арақатынасына UBmax/Ud0тең кері кернеу коэффициенті;
Ud0 -α=0 кезіндегі өзгерткіш кернеуі:
U d 0 ≈ k c k α k RU d = 1. 1 ⋅ 1. 1 ⋅ 1. 05 ⋅ 220 = 279. 51 В.
Анықтамалықтан [3] Т151-100 сериялы тиристорды таңдаймыз.
1. 3. 3 таңдау
Теңестірілмеген кернеу әсерінен, кернеу тізбегіне тоқтамай,
вентильдерде және трансформатор орамдарында шығын тудыратын
теңестіруші тоқ ағып өте алады және қондырғының апаттық істен шығуына
алып келуі мүмкін.
Теңестіруші дроссельдердің қажетті индуктивтілік шамасы теңестіруші
тоқтың ауыспалы құрамыны амплитудасын шектеуінен шығып, 10%-дан
аспайтын шамаға дейін:
L уд. расч ≥
2 U п1
mω c 0. 05 I н
,
мұндағы: U1п - түзетілген кернеудің бірінші гармоникасының
эффективті екі еселенген мағынасы.
24
U п 1 =
U п
U d 0
U d 0 ⋅ 2 = 0. 26 ⋅ 220 ⋅ 2 = 114. 4 В,
(1. 25)
мұндағы: Uп/Ud0=0. 26 - [2] суретінен есептелген m=6 и α=900;
m=6 - тузету фаза саны.
L уд . расч ≥
2 ⋅ 114. 4
6 ⋅ 314 ⋅ 0. 05 ⋅ 41. 073
= 0. 042 Гн.
(1. 26)
Теңдуіш дросселдерін жартылай толатынын таңдаймыз, яғни:
Lуд=0, 7Lуд. расч=0, 029 Гн.
ФРОС-150 сериялы дросселді таңдаймыз. Lуд=0, 03 Гн.
Тегістеуіш дросселдің индуктивтілігін есептейміз:
(1. 27)
Ld керек ≥
2U п
m ω c 0. 05I н
=
2 ⋅ 72. 673
6 ⋅ 314 ⋅ 0. 05 ⋅ 41. 073
= 0. 027 Гн,
(1. 28)
мұндағы Uп=U1п/2=72, 673 Гн
гармоникасының мәні.
-
түзетілген кернеудің бірінші
Тегістеуіш дросселдің индуктивтілігінің керекті:
Lсд=Lкерек-(Lқ+2Lтр+Lуд),
мұндағы Lқ - зәкір және қозғалтқыштың қосалқы полюстерінің
индуктивтілігі:
L дв = 5, 73
U d
pn н I d
= 5. 73
220
2 ⋅1500 ⋅ 41. 073
= 0. 010 Гн.
(1. 31)
2Lтр - қозғалтқыштың контурына келтірілген трансформатордың 2
фазасының индуктивтілігі.
2 L тр =
2 ⋅ u k % ⋅ U 2Ф
ω c I 2ф ⋅ 100
=
2 ⋅ 4. 6 ⋅ 230 / 3
314 ⋅ 36. 822 ⋅ 100
= 0. 00106 Гн.
(1. 32)
Lсд=0, 027-(0, 010+0, 00106+0, 03) =-0, 014 Гн.
Себебі Lсд<0, яғни тегістеуіш дроссел қажет емес.
1. 3. 4 ТТ-Қ электр тізбегінің есептік параметрлерін табу
Түзетілген тоқтың есептік кедергісі:
R p = k ( R я + R дп ) + R щ + R п ,
25
мұндағы: k=1+α(tн-tα) =1+0. 004(100-15) =1. 34;
α=0, 004 - мыс кедергісінің температуралық коэффициенті;
tн=1000 - В классты оқшаулы қозғалтқыштың жұмыс температурасы;
tα=150 - қоршаған орта температурсы;
Rщ - қылшықты контактінің кедергісі:
Rщ = 2 / I d = 2 / 41. 073 = 0. 049 Ом;
Rп - өзгерткіш кедергісі:
,
мұндағы: Rт - трансформатор орамның активті кедергісі:
Rт =
∆ Рк
2 2
=
529
3 ⋅ 550, 07 ⋅ 2, 46
= 0, 130 Ом;
(1. 33)
хт - трансформатор орамының индуктивті кедергісі:
хт =
u k % ⋅ U 1 фн
2
тр
=
4, 6 ⋅ 220
100 ⋅ 23, 45 ⋅ 2, 46
= 0, 175 Ом.
(1. 34)
Rуд - тузеуіш дросселдерінің орамның активті кедергісі:
Rуд = Rт / mтр = 0, 130 / 3 = 0, 043 Ом.
(1. 35)
Сонымен,
Rп = 2 ⋅ 0, 130 + 0, 043 +
0, 175 ⋅ 6
2π
= 0, 470 Ом;
(1. 36)
R p = 1. 34 ⋅ (0. 145 + 0. 101) + 0. 049 + 0. 470 = 0. 878 Ом.
(1. 37)
1. 4 Бөлім бойынша тұжырым және тапсырманы жобалауға қою
Осы бөлімде техникалық мәліметтер және кранның көтеру
механизмінің электр жетегі талартары негізінде ЭЖ сызбасы таңдауы
жүргізілді. Қолданылатын реттеу жүйелерін талдау және шолу нәтижесінде
тиристорлы өзгерткіш жүйесі - қозғалтқышты қолдану мақсатқа сай
екендігі көрінді.
Өндірістік механизмнің және қозғалтқыштың жүктемелік
диаграммаларын құру қозғалтқышты алдын ала таңдауға, ал содан кейін
оны қыздыру жағдайлары жөнінде және қайта жүктеу жөнінде тексеруге
мүмкіндік берді. Таңдалған 2П сериялы қозғалтқыш осы жағдайларды
қанағаттандырады.
Күш өзгерткішінің есебі өзіне оның элементтерін таңдауды, сонымен
қатар ТТ-Қ күш тізбегінің есептік параметрлерін анықтауды қосып алды.
26
Жүргізілген талдау мен есептердің нәтижесінде, келесі
тапсырмаларды шешу қажет:
- Ашық (тұйықталмаған), сонымен қатар тұйықталған жүйедегі
статистикалық сипаттамаларды есептеу және құру.
- Электр жетегінің тұйықталған жүйесінің құрылымын таңдау және
оның негізгі параметрлерін есептеу.
- Электр жетегін басқару сызбасын өңдеу.
2 Электр жетегі жуйесін жобалау
2. 1
Ашық тізбекте сатикалық сипаттарын құрастырып оны
есептеу.
Ашық тізбекті жуүйеде статикалық мінездемелер мынау арқылы құрса
болады:
E п R p
M c ;
ω = U н − I ян R я . д в ,
kФн kФн
(2. 1)
мұндағы Rя. дв -қызуды ескергендегі, қозғалтқыштың якорлі тізбегінің
кедергісі:
R я . дв = k (R я + R дп ) + R щ = 1, 34(0, 145 + 0, 101) + 0, 049 = 0, 408 Ом.
Қозғалтқыштың қозу тоғы:
(2. 2)
I в =
U c '
Rв
=
220
53, 1
= 4, 14 А.
(2. 3)
Зәкірдің номиналды тоғы:
I ян = I d − I в = 41, 073 − 4, 14 = 36, 93 А.
Статикалық момент пен жылдамдық:
ωс=144, 67 1/с;
Мс. под=106, 918 Нм;
Мс. сп=68, 428 Нм.
Статикалық мінездемелер теңдеуден:
(2. 4)
kФн =
U н − I ян Rя . д в
ω н
=
220 − 36, 93 ⋅ 0, 408
π ⋅1500 / 30
= 1, 305 В/с.
(2. 5)
27
ωс және Мс. под кезіндегі өзгерткіштің ЭҚК:
Еп . керeк = ω с kФн +
R р
kФн
Сіз бұл жұмысты біздің қосымшамыз арқылы толығымен тегін көре аласыз.
- Іс жүргізу
- Автоматтандыру, Техника
- Алғашқы әскери дайындық
- Астрономия
- Ауыл шаруашылығы
- Банк ісі
- Бизнесті бағалау
- Биология
- Бухгалтерлік іс
- Валеология
- Ветеринария
- География
- Геология, Геофизика, Геодезия
- Дін
- Ет, сүт, шарап өнімдері
- Жалпы тарих
- Жер кадастрі, Жылжымайтын мүлік
- Журналистика
- Информатика
- Кеден ісі
- Маркетинг
- Математика, Геометрия
- Медицина
- Мемлекеттік басқару
- Менеджмент
- Мұнай, Газ
- Мұрағат ісі
- Мәдениеттану
- ОБЖ (Основы безопасности жизнедеятельности)
- Педагогика
- Полиграфия
- Психология
- Салық
- Саясаттану
- Сақтандыру
- Сертификаттау, стандарттау
- Социология, Демография
- Спорт
- Статистика
- Тілтану, Филология
- Тарихи тұлғалар
- Тау-кен ісі
- Транспорт
- Туризм
- Физика
- Философия
- Халықаралық қатынастар
- Химия
- Экология, Қоршаған ортаны қорғау
- Экономика
- Экономикалық география
- Электротехника
- Қазақстан тарихы
- Қаржы
- Құрылыс
- Құқық, Криминалистика
- Әдебиет
- Өнер, музыка
- Өнеркәсіп, Өндіріс
Қазақ тілінде жазылған рефераттар, курстық жұмыстар, дипломдық жұмыстар бойынша біздің қор #1 болып табылады.

Ақпарат
Қосымша
Email: info@stud.kz