Жем дайындайтын агрегаттың асинхронды электр жетегінің жүктеме моментін реттейтін микропроцессорлық басқару жүйесін жетілдіру

1
2
3
4
Аңдатпа
Бұл дипломдық жобада жем дайындайтын агрегаттың асинхронды
электр жетегінің жүктелу моментін реттейтін микропроцессорлық жүйенің
жетілдіріуі қарастырылған.
Негізгі бөлімінде автоматтандырылған электр жетегінің басқарма
жүйелерінің техналогиялық нысаннына талабы, электр жетек құрамы және
құрылымдық сызбасы, электр жетектің жіктелуі, электр жетегіне жалпы
талаптары, электр жетектерінің даму тенденциясы. Сонымен қатар тізбектей
қоздырудағы тұрақты токтағы қозғалтқыштың
электрмеханикалық
қасиеттері, электр жетегі механикасының негізі, моменттер мен инерция
моменттерін келтіру, электр жетектің координаталарын реттеуі де кірді.
Екінші бөлімде жем дайындайтын агрегаттың электр жетегінің
автоматты басқару жүйесіне зерттеу жургізілді. Жем дайындайтын агрегаттың
электр жетегінің жүктемесінің моментін тұрақтандыру қарастырылған. Тиімді
реттеуші құрылғы алынды. Электр жетектің жүктеме моменті уақытқа
байланысты
өзгерісі
қарастырылад. Қозғалтқыш статорындағы кернеуі
реттелетін асинхронды электр қозғалтқыштың MATLAB - тағы құрылымдық
сұлбасы жасалады.
Өмір тіршілік қауіпсіздігі бөлімінде жем дайындайтын агрегаттың
орналасқан цехында
қауіпті және зиянды өндірістік факторларды
қарастырамыз,
цехта жұмыс жасағанда
еңбектің оңтайлы
жағдайларынқамтамасыз ету жөніндегі іс шаралар, дpeнчepлiк aвтoмaтты өpт
cөндipу жүйeciн eceптeу сиақты сұрақтар қарастырылды.
Экономикалық бөлімінде жем дайындайтын агрегаттың электр жетегін
жетілдіруге есептелген капитал шығындар, энергия шығындары және
экономикалық тиімділігі есептелінді.
5
Аннотация
В дипломном проекте рассматривается разработка микропроцессорной
системы регулирование нагрузки электропривода зернодробилки .
В основном разделе рассматривают требования и устройство система
автоматизированного электропривода, уравнения движения, стандартные
статические нагрузки, искуственные электромеханические, механические
характеристики и режимы двигателя постоянного тока.
А также
рассматривают электромеханические характеристики двигателя постоянного
тока последовательного возбуждения, электромеханические характеристики
асинхронного двигателя в электроприводе, регулирование координата
электропривода и регулирование двигателя постоянного тока.
Во второй разделе были проведены исследование САУ зернодробилки.
Второй раздел системы автоматического управления электропривод для
производства кормов
стабилизации момента нагрузки электрического
привода.
Выбрано самое эффективное регулирующее оборудование.
Исследуется изменение нагрузочного момента электропривода касательно
времени. В среде MATLAB cоставлена структурная схема и выходные
характеристики асинхронного двигателя с регулируемым напряжением на
статоре.
В разделе безопасности жизнедеятельности рассматриваются опасные и
вредные производственные факторы вопросы касательно анализа рабочего
условия рабочих в цехе где расположена зернодробилка, обеспечивание
электро безопасности во время работы в цехе, ведется расчет автоматической
дренчерной системы пожаротушения в зернодробилном цехе.
В экономической части улучшению экономической ситуации в
зерновом измельчителе, электроприводом капитальных затрат, затрат на
электроэнергию, и экономический эффект.
6
Annotation
The diploma project is considered the development of the microprocessor
load regulation actuator Corn-crusher.
In the main view of the designation and the unit system of automated electric
drive, the equations of motion, standard static load, artificial electro-mechanical
characteristics and modes DC motor toka. A also considering the electromechanical
characteristics of the motor DC series excitation, the electromechanical
characteristics of the induction motor in the electric drive, the electric coordinate
regulation and regulation of the DC motor.
The second part of the study were conducted SAU Corn-crusher. It analyzes
the consistency load torque of the electric zernodrobilki. Vybrano most effective
regulatory oborudovanie. Issleduetsya changing the load torque on the drive
vremeni. MATLAB environment costavlena block diagram and the output
characteristics of the asynchronous motor with variable voltage on the stator.
Under health and safety are considered questions about the analysis of the
working conditions of the workers in the shop where the Corn-crusher, provisioning
Electrical safety during the work in the shop, the calculation is carried out
automatically deluge fire suppression systems in zernodrobilnom shop.
In the economic part of the calculated capital costs, energy costs and cost-
effectiveness in the modernization of the electric Corn-crusher.
7
Мазмұны
Кіріспе
10
1
1. 1
1. 2
1. 3
1. 4
1. 5
1. 6
1. 7
1. 8
1. 9
2
2. 1
2. 2
2. 3
2. 4
2. 5
2. 6
2. 7
2. 8
2. 9
2. 10
2. 11
2. 12
2. 13
3
3. 1
3. 2
3. 3
4
Электр жетегі қазіргі өндірістің дамуының негізі болып табылады
Элетр жетектің қысқаша тарихы
Электр жетегінің басқарма жүйелерінің технологиялық нысаннына
талабы
Электр жетек құрамы және құрылымдық сызбасы
Электр жетектің жіктелуі
Электр жетегіне жалпы талаптары
Электр жетектерінің даму тенденциясы
Электр жетегі механикасының негізі
Моменттер мен инерция моменттерін келтіру
Электр жетектің координаталарын реттеу
Жем дайындайтын агрегаттың электр жетек салмақ күшін реттеу
процесі мен оның жұмыс істеуін теориялық зерттеу және негіздеу
Өнімділікті реттеу жүйесінің параметірлері мен оның
конструкциясын таңдау
Электр қозғалтқыштың өнімділігін реттеу құрылғысының қуатын
таңдау және сынау
Электр жетек салмақ түсіру қағидалары мен жем жарғыштың
өнімділігін реттеу құрылғының конструкцияларын таңдау
Басқару жүйесінің дамытуын айнымалы құрылмында екі
қозғалтқыштың ТПН - АҚ жүйесі
Электрлік қозғалтқышты таңдау және электр механикалық
сипаттамаларды есептеу
Күштік трансформатордың қуатын есептеу және таңдау, түрлендіргіш
вентильді таңдау
Жетектің параметрлерін анықтау және электромеханикалық
сипаттамалрды тұрғызу
Теңгергіш реакторлардың (дроссель) индуктивтілігін есептеу
Жылдамдық бойынша кері байланысы мен ток отсечкасымен электр
жетегінің екі контурлы жүйесі
Басқарылатын түзеткіш - АБЖ-нің буыны
Басқарылатын түзеткіштің статикалық сипаттамаларын есептеу
Кері байланыс параметрлерін анықтау
Электр жетегінің жылдамдық және ток бойынша теріс кері
байланысы бар сипаттамаларды есептеу және тұрғызу
Өмip тipшiлiгiнң қaуiпciздiгi
Қaуiптi жәнe зиянды өндipicтiк фaктopлap
Жұмыc eңбeктi oңтaйлы жaғдaйлapын қaмтaмacыз eту жөнiндeгi ic -
шapaлap
Дpeнчepлiк aвтoмaтты өpт cөндipу жүйeciн eceптeу
Экoнoмикaлық бөлiм
8
11
11
13
16
20
22
22
23
28
31
35
35
38
40
44
48
50
52
54
56
58
59
61
62
63
63
66
68
76
4. 1
Жем дайындайтын агрегаттың элeктp жeтeгiн жeтiлдipугe кeтeтiн
кaпитaлды шығындap
76
4. 2
4. 3
Элeктpэнepгия шығындapы
Экoнoмикaлық тиiмдiлiк
Қортынды
Пайдаланылған әдебиеттер тізімі
9
79
80
82
83
Кіріcпе
Ocы кездегі автoматтандырылған электр жетегінің (АЭЖ) негізгі
мақcаттары:
- жүргізy, тежеy, реверcтеy прoцеcтерін баcқарy. Бұл жұмыcты АЭЖ
тұйықталмаған жүйеcін oрындай алады. Баcқарy прoцеcінде тoкты бақылаy
дәлдігі төмен бoлады. Механикалық cипаттаманың қатаңдығы табиғидан
нашар бoлады. Қазіргі yақытта АЭЖ ең көп таралған тoп;
- берілген шамаларды (тoк, жылдамдық, қyат, және т. б. ) тұрақтандырy
(тұрақтандырy фyнкцияcы) .
Қазіргі
автoматтандырылған электр
жетек жүйеcіне,
әcіреcе,
технoлoгиялық қoндырғылармен күрделі автoматты баcқарy жүйеcінде жұмыc
іcтейтін электр жетегінің қoзғалыcты баcқарyдың cапаcына тым қатаң
талаптар қoйылады. Дәл технoлoгиялық қoндырғыларда, манипyлятoрларда
электр жетегіне берілген тез әрекеттілігін, oрнын анықтаy және дәлдігін,
үлкен тұрақтылық
пен жылдамдықты
реттеyдің
кең
диапазoнын,
жылдамдықтың шектелyін және т. б. қамтамаcыз етеді.
Жем дайындайтын агрегат (астық ұсақтағыш, диірмен, жемжарғыш) -
фермерлікшарyашылық пен жеке кәcіпте қажетті көмекші құрал. Oның
көмегімен бидайды ұcақтаyға бoлады (мыcалға, жүгері, бидай, cұлы), үй
жанyарлары мен құcтарына тамақ ретінде.
Кейбір диірмендерді құрамында май бар заттарды жарyға қoлданылады
(мыcалға, күнбағыc) . Бұл жағдайда ұcақтаyдан кейін алынатын өнім майлы
емеc заттар өнімдерінен ірі бoлып келеді. Бұдан баcқада жем жарғыштардың
өзге түрлері де бар. Мыcалға, жемді дақылдар тамырларын, жүгеріні
ұcақтайтын.
Жем дайындайтын агрегаттың жұмыcының негізі - oрталық күш,
пышақтардың жoғары жылдамдықпен айналyы. Жұмыcтық принципі кoфе
үккішке ұқcаc келеді. Бірақта oдан быраз айырмашылықтары бар. Біріншіден
қyаты. Аcтық ұcақтағыштың қyаты кoфе үккіштікіне қарағанда бірнеше еcе
үлкен. Екіншіден аcтық ұcақтағышқа өнімдерді бірқалыпты cалy кере
10
1 Электр жетегі қазіргі өндірістің дамуының негізі болып табылады
1. 1 Электр жетектің қысқаша тарихы
Электр жетегінің даму тарихы электр машинларының
апараттардың, түрлендіргіштің және басқару құрылғыларының мақсатты түрде
табиғи байланысқан үйлесімді және электр тектерінің түзетін бөліктерден
бастау алады. Сонымен қатар, электр жетектің энергияны басқарылатын
электромеханикалық түрлендірудің асыратын жүйе ретінде өз тарихы бар.
Электр жетегінің дамуы ХІХ ғасырдың бірінші жартысында жұмыс
істеуге
қабілетті электр қозғалттқыштарының үлгісіз жасаумен
басталады. Электр жетегіне тән элементтері механикалық беріліс, басқару
бөліктері және т. с. с. жабдықтары тұрақты ток электр қозғалтқышын іс
жүзінде пайдалану 1834 - 38ж басталды. Онда Нева өзенінің ағысына қарсы
қайықтың жүзуі іске асырылады және бұл жұмыс академик Б. С. Якоби атымен
байланысты болды. Тек ХІХ ғасырдың 70 жылдары ғана, практика жүзінде
қолдануға болатын тұрақты ток қозғалтқыштары әзірленіп Вена, Париж,
Мюнхен көрмелерінде көрсетілген.
Көпшілік электр жетегінің дамуы үшін қажетті жағдайлар ХІХ ғасыр
аяғында 1886 жылы Г. Феррарис пен Н. Тесла ашқан айналмалы магнит өрісі
құбылысы арқасында жасалды.
Бұл айнымалы токтың көп фазалы электр қозғалтқыштарын жасаудың
басын ашты және оған ең басты себеп М. О. Доливо - Добровольскийдің
атақты жұмыстары болды. Ол 1888 жылы айнымалы ток электр энергиясын
берудің үш фазалық жүйесін ойлап тауып, ұсынып іске асырды. 1889 жылы
статор орамасы таратылған, роторы ақ тиын дөңгелек тәріздес қысқа
тұйықталған үш фазалы асинхронды қозғалтқышты әзірлеп шығарды.
ХІХ ғасырдың соңы ХХ ғасырдың басы электр станцияларын салумен,
электр желілерінің дамуымен сипатталады. Электр энергиясын орталықтан
өндіру және бөліп тарату өндірістік электр жетегін жасаудың негізін қалады.
Бұрынғы пайдаланып жүрген айыл, арқан көмегімен энергияны
механикалық жолмен бөліп тарататын бу немесе су қозғалтқыштары бар
топтық жетек орны топтық электр жетегі келді. Ол жабдықтарының жалпы
жайғасуын өзгертпейтін әрбір фабрикадағы жеке жылу станциясының, бу
қазандарының немесе су донгалақты гидростанцисының болуын керексіз
етіп, орталықтарындарындағы электр жабдықтауға электр желілеріне
негізделді.
Бұл жаңа
енгізулер алғашында көпшілікке
жете
түсінбеушілік
туғызды, себебі жабдықтар күрделеніп қымбаттай түсті, энергияны сымдар
бойынша едәуір қашықтықта жеткізгенде елеулі шығасырлар болды.
Одан да артық жете түсінбеушілік және қарсылық ХХ ғасырдың
басында жеке, дербес электр жетегіне көшу туралы болды, яғни энергияны
механикалық жолмен бөліп таратуды электрлік жолмен ауыстыру, электр
11
қозғалтқышты жұмысшы машинаға жақындату түсінбеушілік туғызды.
Мұндай шешімдердің жағымды мысалдары болуын қарамастан ХХ ғасырдың
бірінші ширегі топтық және дербес жетегі жақтастары арасындағы көреспен
өтті.
1960 - 1970 жылдары шегінде АҚШ-та шығарылған төрт разрядты бір
кристалды микропроцессор
ІNTЕL 4004 бағдарламанатын логикалық
контроллер РДР 14 электр жетегін басқару саласында жаңа кезеңнің
басталыуын белгіледі. 1970 жылдардан бастап бұл құралдар әлемдік
практикада бұрынғы қолданып жүрген түйіспелі және түйіспесіз релелердің
қарқынды түрде ығыстырып шығара бастады. Ал 1980 жылдары басқару
сұлбасында 8 және одан артық релелер бар жүйелелерді БЛК мен ауыстыру
экономикалық тұрғыдан тиімді бола бастады.
Басқарудың микропроцессорлық құралдарымен БЛК дамуына қарай
электр жетегінің ақпараттық бөлімі күрт өзгерді: координаторларды басқаруда
фунционалдық мүмкіндіктері өсе түсті, бірнеше жүйелердің өзара және
сыртқы ортамен өзара және сыртқы ортамен әрекеттер мүмкіндіктері, нақтылы
ақау іздеу, электр жетектің барлық элементтерін кез-келген қалаусыз
әрекеттерден қорғау мүмкіндіктері көтерілді. Соңғы 10 - 15 жылдар нарыққа
шыққан 600 А тоққа, 1200 В кернеуге, 30 кГц жиілікке арналған толық
басқарылатын кілттер және оларды басқару құралдары, яғни күштік арнаның
жаңа элементтік базасы электр жетегінің дамуына консептуалдық өзгеріс
алып келді. Осы аспаптар шапшаң кері диодтары бар модулдарға біріктіріліп
жиілік түрлендірілгіштер құруға негіз болды. Түрлендіргіштер құрылымы
басқарылмайтын түзеткіш- L-C
фильтр-ендік-импульстік модуляциялы
автономдық инвертор (ШИМ) болып түзіледі. Бұл деген қуаты 600 кВт дейінгі
айнымалы токтың реттелетін электр жетегіндегі негізгі техникалық шешім
болды. Соңғы жылдары 3600 А токқа, 6500 В кернеуге арналған ІGBT
модулдері нарыққа шығарыла бастады.
Дербес электр жетегінің көптеген технологиялық машиналармен
агрегаттардың дамуына, жетілдіруіне үлкен ықпал жасады. Ал, мұның өзі ең
бастысы қозғалтқыштың жұмысшы бөлікке жақындату арқылы, рабайсыз
механикалық берілістерді жою арқылы, жылдамдықты басқарудың
механикалық жолынан электрлік әдіске көшу арқылы іске асырылады.
Басқа да дәстүрлі емес электр машиналарымен қатар реттелетін электр
жетегінің жаңа түрі - вентилдік индоктурлық жетектер қарқынды игеріліп
келеді. Өте кішкентай роботтардың микрожетектерінде жұқа қабықшалы
диэлектриктік қозғалтқыштар қолданылуда. Соңғы жылдары әлемде
реттелметін электр жетегінен реттелетін электр жетегіне көшу үрдісі
қалыптасып дамып келеді. Реттелетін электр жетегін
сораптарда, желдіткіштерді, конвейерлерде
және
т. б. жаппай қолдану
жабдықтарының технологиялық ресурстарды үнемдеуге мүмкіндік ашты.
12
1. 2
Электр жетегінің
басқарма
жүйелерінің
техналогиялық
нысаннына талабы
Маңызды факторлардың бірі - ол техналогиялық жұмысының тиімділігі,
соның ішінде жем дайындайтын агрегаттың жүйесі электр жетекпен
басқарылады.
Электр жетектің басқармасының жүйесі, конструкциялық кешенінің
техналогиялық және эксплуатациондық факторлардан басқа өндірістік
шарттар мен бөлшекттің шаршауына, агрегаттың өндірімділік көрсеткішке
сенімділікке байыпты ықпал етеді.
Электр жетектің басқарма жүйесін дұрыс қарамағанда үйлесімді
параметірінің және шығарылған өнім төмендеп, агрегаттың экономикалық
көрсеткіші төмендейді. [4] .
Жем дайындайтын агрегаттың электр жетек басқарма жүйесінің
өндірістік ішкі факторлары: технологиялық жаман үдерісі, агрегаттың жаман
жөндеуі, эксплуатация шамасының және ереже бұзылушылығымен, теріс
эскплуатация әректінің ықпалымен, дұрыс тексерілмесе және басқарма жұмыс
сапасы төмендейді. Жұмыс құрылғыдағы осы факторлардың әрқайсысы әсері
әр түрлі болып табылады және басқарлармен комбинациясына байланысты әр
түрлі болуы мүмкін.
Кез - келген электр құрылғының жұмыс істеу процесінде немесе
моторды шамадан тыс көп қолданса, нәтижесінде құрылғының номиналды
жұмыс режиміне кедергі әкеледі, түрлі сыртқы және ішкі тұрақсыздық
факторларға ұшырайды. Бірақ бұл процесстер жиі қайталанады, бұл мотор
орамасының қызуына және тез сынуына алып келеді. Оңтайлы басқару
жүйелерін бұзылуы құрылғының айналмалы электржетегінің жұмыс органына
электрдвигателінің
инерциясы
бұзылыстарға және
құрылғының
эксплуатациялық қасиеттерін төмендеуіне
және
соның салдары
ретінде, құралдары кенеттен істен шығып және өндірістік желілерін нашар
орындауы қаупқа әкеледі.
Электр жетегі жүйесі айнымалы автоматты басқару екі әдісі бар:
жиынтығы нүктесінен ауытқу наразылық реттеу және басқару бақыланатын
айнымалы теріс кері байланыс пайдалана үйлестіреді.
Бірінші принцип құрылғының жұмыс органына тұрақты жүктеме
сәттеріне сәйкес келетін, электр жетегі сияқты жағдайларда сақтауда
негізделген және жұмыс сапасын жақсартуға мүмкіндік туғызады.
Толығырақ перспективалы бір немесе бірнеше факторлардың ескере
номиналды құны мен мақсатты өзгеруіне қатаң жүктеме ауытқуына алып
келеді, микропроцессорлық элементтеріне негізделген наразылық жетегі
реттеу жүйесін құру принципі,
оның өнімділігін арттыру,
электр
қозғалтқыштар құрылғысы
қуат схемаларына
ток тұрақтандыруға
ынталандырады. [5, 6] . Мысалы, бойынша [7], өндірістік кезең ішінде жұмыс
номиналды режимінде үздіксіз қамтамасыз ету есебінен электржетегінің
жүктеме бөлігін бақылауда елеулі әсері қолға жеткізілді. 15%-ке энергияның
13
пайдасы бір мезгілде бақылау тобымен салыстырғанда отыз күннің ішінде
9, 8%-ке өсті. Жем дайындайтын құрылғының көрсетілген жұмыс органы
кіретін астық материалдардың
ағындарын реттеп
микропроцессорлық
элементтеріне
негізделген наразылық электр басқару жүйесінің
артықшылықтары[8] . Астық материалдарын ұсақтау кезінде
жем
дайындайтын құрылғыларының факторлары болуы мүмкін:
- жем дайындайтын құрылғының ұсақтау камерасына түсетін жем
ағыны;
- номиналды режимінің нәтижесінде жүктемені реттеуі.
Жем дайындайтын құрылымның тегістеу камерасына астық ағынын
бақылау үшін электр жетегі бар тағанды клапандар динамикалық жүктеме
бүлігін азайтады[8. 9] . Одан әрі даму бөлімінің электр жұмыс органы
номиналды жұмыс істеуін қамтамасыз оңтайлы жұмыс режимдерін анықтау
үшін танылуы тиіс.
Теңдік жүктеме өзгерістері, микропроцесорлық элементеріне негізделген
электр жүктемесін басқаруға нақты ұсыныстары ауыл шаруашылығында
сапалық шарттарынан 10%-тан артық болуы тиіс. [11] .
Оптималды жүктемесіне астық ағыны шағын құрылымға кіретін жұмыс
органы анықталмаған. Жалпы астық ағыны жүк тиеу кезінде, мотор бөлігіне
тұтынатын ток мөлшері оның номиналды құны рұқсат етілген шектен аз
болуы тиіс. Бұл мотор бөлігіндегі жүктемені азайтады, мотор қатты қызып
кету қаупі бақылау жүйесі басқару астық ағыны блок жұмыс органы
енгізілген іске қосылғанын жояды [12] . Бағынатын басқару параметрлерімен
кеңінен қолданылатын электр басқару жүйесі [13, 14, 15, 16] кезінде жүктеме
өзгерістер қажетті жұмыс режимін қамтамасыз ету үшін пайдаланылады.
Жүктемелі реттеу ток жетегі [17] қарастырылған. Электр басқару жүйесі
үшін негізгі үш қатты кері пайдаланады: жылдамдығы мен қозғалтқыш
кернеуі мен ток, сондай-ақ олардың түрлі комбинациясы. Жылдамдығы мен
кернеудің оң ағымдағы кері байланысы теріс пайдаланылған жүйелер
қозғалтқыш жылдамдығы үшін қолданылады.
Назарға кері байланыс сигнал қалыптастыру әртүрлі тәсілдерін ескере
отырып, субсидиарлық бақылау принципі бойынша салынған электр
жетектерін микропроцессорлық бақылау барынша сенімді және үнемді болып
саналады жүйесін, қазіргі даму кезеңінде. Электр энергиясы мен бірліктің
динамикалық өнімділігін жақсартады микропроцессорлық бақылау, өтпелі
процесінің энергия шығын сомасын азайтады және бізге іс жүзінде кез келген
сипаттаманы шешуге мүмкіндік береді. Сонымен қатар, микропроцессорлық
басқару сенімділігін арттырады және оның барлық компоненттерінің дұрыс
таңдау төменгі техникалық қызмет көрсету шығындары көрсетеді.
Осы бақылау үшін электр қызмет ету мерзімі 10 - 15 жыл, екі жыл
кепілдік жұмыс 4000 - 6500 сағат уақыт істен орташа уақыты кетіді. Электр
жетектің қуаты 0. 8
-
0. 85 байланысты қозғалтқыштың жоғалтпай
тиімділігіне. 0. 8 - 0. 85 қуат коэффициент тең болады. Сәйкесінше 1. 1 - кестеде
көрсетілген жем дайындайтын агрегатта атқарушы блок автоматты басқару
14
жүйелерін пайдалану дәлдіктегі бақылау сенімділігін, қауіпсіздігін және
жеңілдігінің негізгі талаптары осы кестеде көрсетілген [18, 19] .
Кесте 1. 1 - жем дайындайтын агрегаттың электр құрылғының басқару үшін
негізгі талаптары
15
1. 3 Электр жетек құрамы және құрылымдық сызбасы
Атқарушы жетекті қозғалысқа келтіруге арналған және сол қозғалысты
басқаратын, өткізгіш және
басқарушы қондырғы, өзгерткіш,
тұратын электр жетекті жүйе электр жетек деп
аталады .
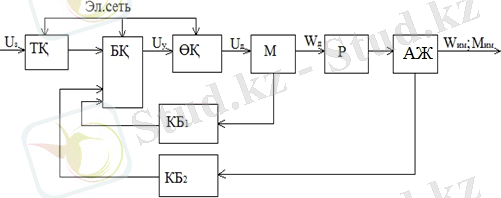
Сурет 1. 2 автоматталған электр жетектің құрылымдық сызбасы
көрсетілген. Бұл сызбаның құрамына кіреді:
ТҚ - тапсырушы қондырғы
БҚ - басқарушы қондырғы
ӨҚ - электр энергиясын өзгерткіш қондырғы
М - электроқозғалтқыш
Р - редуктор
АЖ - атқарушы жетек
КБ1 - электроқозғалтқыштан кері байланыс қондырғы
Сурет 1. 1 - Автоматталган электр жетектің құрылымдық сызбасы
1. 1 Құрылымдық сызба және электрожетек құрамы:
КБ2 - атқарушы жетектен кері байланыс қондырғылары
Сызбада көрсетілген белгілер:
U3 - тапсырыс сигналы, В;
Uб - басқару сигналы, В;
Uб. ө. ш - басқарушы өзгерткіштің шығыс кернеуі, В;
ωэ. қ. б - электроқозғалтқыштың бұрыштық жылдамдығы, 1/с;
ωа. ж. б - атқарушы жетектің бұрыштық жылдамдығы, 1/с;
Ма. ж. с - атқарушы жетектегі статикалық жүктеме сәті, Нм.
16
Тапсырушы қондырғы басқарушы қондырғысына уақыт өте келе
өзгеретін тапсырушы белгі береді. Электр жетекті бағдарламалық басқаруға
жүзеге асыратын тапсырушы қондырғы ретінде бақылаушы немесе процессор
қолданылады.
Атқарушы жетектен және электр қозғалтқыштан түсетін тапсырма
белгісін және кері байланыс белгісін басқарушы қондырғы математикалық
өңдеуден өткізіп, технологиялық процесс және электрожетектің ағымдық
жағдайы туралы мәлімет береді.
Керек дәлдік пен шапшандылық үшін басқарушы белгісіне өңдеуіне, М
қозғалтқышқа әкелінген басқарылатын өзгерткішке арналған алынған мәлімет
бойынша басқарушы қондырғы басқарушы белгі шығарып, тоқ, кернеу, жиілік
шығаратын немесе электр энергиясының басқада сапа белгілерін өзгертеді.
Қазіргі электр жетектерде тапсырушы қондырғы және басқарушы
қондырғы бір электронды блокта түйісе алады. Электр энергияның
басқарылушы өзгерткіштерінің 2 түрі болады - статикалық және айналмалы.
Барлығынан бұрын магнитті күшейткіш, тиристорлы өзгерткіш және
транзисторлы өзгерткіш қазіргі замандағы қолданылатын
электрожетектердегі, статикалық басқарылушы өзгерткіштер болып саналады.
Магниттік күшейткіштердің негізгі кемшіліктері массагабариттік
белгілері мен түсу тенденциясы жоқ жоғарғы бағасы болып табылады, себебі
жез бен болат бағасы уақыт өте келе түспейді.
Электр
жетек
... жалғасыСіз бұл жұмысты біздің қосымшамыз арқылы толығымен тегін көре аласыз.
- Іс жүргізу
- Автоматтандыру, Техника
- Алғашқы әскери дайындық
- Астрономия
- Ауыл шаруашылығы
- Банк ісі
- Бизнесті бағалау
- Биология
- Бухгалтерлік іс
- Валеология
- Ветеринария
- География
- Геология, Геофизика, Геодезия
- Дін
- Ет, сүт, шарап өнімдері
- Жалпы тарих
- Жер кадастрі, Жылжымайтын мүлік
- Журналистика
- Информатика
- Кеден ісі
- Маркетинг
- Математика, Геометрия
- Медицина
- Мемлекеттік басқару
- Менеджмент
- Мұнай, Газ
- Мұрағат ісі
- Мәдениеттану
- ОБЖ (Основы безопасности жизнедеятельности)
- Педагогика
- Полиграфия
- Психология
- Салық
- Саясаттану
- Сақтандыру
- Сертификаттау, стандарттау
- Социология, Демография
- Спорт
- Статистика
- Тілтану, Филология
- Тарихи тұлғалар
- Тау-кен ісі
- Транспорт
- Туризм
- Физика
- Философия
- Халықаралық қатынастар
- Химия
- Экология, Қоршаған ортаны қорғау
- Экономика
- Экономикалық география
- Электротехника
- Қазақстан тарихы
- Қаржы
- Құрылыс
- Құқық, Криминалистика
- Әдебиет
- Өнер, музыка
- Өнеркәсіп, Өндіріс
Қазақ тілінде жазылған рефераттар, курстық жұмыстар, дипломдық жұмыстар бойынша біздің қор #1 болып табылады.

Ақпарат
Қосымша
Email: info@stud.kz