Комбайнның көлбеу камерасындағы электр жетегінің жүктемесін микропроцессорлық басқару жүйесін жобалау

1
ҚАЗАҚСТАН РЕСПУБЛИКАСЫ БІЛІМ ЖӘНЕ ҒЫЛЫМ
МИНИСТРЛІГІ
Коммерциялық емес акционерлік қоғамы
АЛМАТЫ ЭНЕРГЕТИКА ЖӘНЕ БАЙЛАНЫС
УНИВЕРСИТЕТІ
Электрэнергетика
Электрэнергетикасы
«Өндірістік қондырғылардың электр жетегі және автоматтандырылуы »
Жобаны орындауға берілген
ТАПСЫРМА
факультеті
мамандығы
кафедрасы
Студент
Жоба тақырыбы
Атшабар Бауыржан
(аты - жөні)
Комбайнның көлбеу камерасындағы электр жетектің жүктемесін
басқарудың микропроцессорлық жүйесін жасау
.
ректордың « 29 » қыркүйек
№ 124 бұйрығы бойынша бекітілген.
Аяқталған жұмысты тапсыру мерзімі: «_22_»_ мамыр __2015 ж.
Жобаға
бастапқы деректер ( талап етілетін жоба нәтижелерінің
параметрлері және нысанның бастапқы деректері) :
ДПР-72- Ф1 - 03М3 қозғалтқышы ; Rя=16 Ом; Lя=0, 314 Гн; I я=1, 3 А;
Тдв=25 мкс.
Диплом жобасындағы
әзірленуі
тиіс
сұрақтар тізімі немесе диплом
жобасының қысқаша мазмұны:
Дипломдық жобада ауыл шаруашылығының өнімділігіне қажетті
әмбебап комбайнның көлбеу камерасын жасап шығарды. Олар өзінің
құрылымы, сенімділігі және арзандылығымен ерекшеленеді және өндіріске
жіберілген отандық кейбір құрылғыларының бірі болып табылады.
Көлбеу камераның кемшілігі - әрбір дәнді дақылдық материалға
көлбеу камера қондырғысының түбі өзгертіліп отырады. Дәнді дақылдарды
жинамас бұрын дәндік материалдың дымқылдығын, сабағының ұзындығын,
егістік бедерінің түзулігін, дәнді дақыл беріктілігін тексеру сияқты
қосымша зерттеулер жүргізу керек. Жинаудан бұрын жоғарыда
келтірілгенді тұрақты түрде тексеріп тұру, нәтижелі көрсеткіштерді,
өнімнің бағасы мен жұмыстың қызметіне және жұмыс өнімділігінің
көбеюіне бейімдейді.
2
3
4
Аңдатпа
Дипломдық жобада ауыл шаруашылығының өнімділігіне қажетті
әмбебап комбайнның көлбеу камерасын жасап шығарды. Олар өзінің
құрылымы, сенімділігі және арзандылығымен ерекшеленеді және өндіріске
жіберілген отандық кейбір құрылғыларының бірі болып табылады.
Көлбеу камераның кемшілігі - әрбір дәнді дақылдық материалға
көлбеу камера қондырғысының түбі өзгертіліп отырады. Дәнді дақылдарды
жинамас бұрын дәндік материалдың дымқылдығын, сабағының ұзындығын,
егістік бедерінің түзулігін, дәнді дақыл беріктілігін тексеру сияқты қосымша
зерттеулер жүргізу керек. Жинаудан бұрын жоғарыда келтірілгенді тұрақты
түрде тексеріп тұру, нәтижелі көрсеткіштерді, өнімнің бағасы мен жұмыстың
қызметіне және жұмыс өнімділігінің көбеюіне бейімдейді.
“БЖД” бөлімінде
электр жетегін пайдалануда техника қауіпсіздігін
сақтау ережелері қарастырылды. Қopғaныстық жерге қосу құрылғысын
таңданды және есептелінді. Цехта пайда болатын шу және дірілді азайту
бойынша шаралар қолданылды.
“Экономикалық” бөлімінде жиілікті - реттелетін электр жетегінің
қолданылу қажеттіліктері қарастырылды. Техникалық - экономикалық
көрсеткіштері, күрделі қаржылық жұмсалымдары, пайдалануға кететін
жылдық ағымдық ұсталымдары есептелінді.
5
Аннотация
В дипломном проекте рассмотрено ряд универсальных наклонных камер
комбайна востребованных сельско - хозяйственным производством. Они
отличаются по конструкции, надежностью и дешевизной, и являются одними
из немногих оборудование отечественной разработки доведенных до
производства.
К недостатку наклонной камеры относится то, что для каждого
зернового материала изменяется дно наклонной камеры насадки.
Соответственно перед началом уборки зерновых культур потребуется
провести дополнительных исследований
как определения влажности
зернового материала, длину стебля, неровности рельефа поля, плотности
зерновых материалов. Приведенные необходимые постоянного исследования
перед началом уборки, влечет за собой увеличение затрат труда и таких
результирующих показателей, как стоимость продукции и услуг работы.
В БЖД» части рассматривается ПУЭ технической безопасности при
использовании электрических приводов. Были выбраны и расчитаны
устройства на зону защиты. Проводится мероприятия по уменьшению шума и
вибрации, которые создаются в цеху.
«В экономически» части рассматривается необходимости применения
частотно - регулирующего электропривода. Приведены расчеты технико -
экономических показателей, капитальных вложении, текущих годовых
эксплуатационных издержек.
6
Annotation
The thesis project examined a number of universal tilt cameras combine
sought-after agricultural production. They differ in terms of design, reliability and
low cost, and are one of the few domestic development equipment brought to
production.
For lack of feeder include the fact that each grain of material changes bottom
feeder nozzle. Accordingly, before the harvesting of grain crops will need to
conduct additional studies as the determination of moisture content of the grain of
the material, the length of the stem, the rugged topography of the field, the density
of granular materials. These studies must be constantly before harvesting, entails an
increase in the cost of labor and the resulting indicators such as the cost of products
and services work.
"In BC, " is considered part of the SAE technical safety in the use of electric
drives. They were selected and the device are designed for the protection zone.
Carried out measures to reduce noise and vibration, which are created in the
workshop.
"In economically" is considered part of the need for frequency - regulating
drive. The calculations of technical and economic parameters, capital investment,
on going annual operating costs.
7
Мазмұны
Кіріспе
10
1
1. 1
1. 2
1. 3
1. 4
1. 5
1. 6
1. 7
1. 8
2
2. 1
2. 2
2. 3
2. 4
2. 5
2. 6
2. 7
3
3. 1
3. 2
3. 3
4
4. 1
4. 2
4. 3
Технологиялық бөлім
Электр жетектерінің жіктелуі
Электр жетегінің негізгі элементтері және құрылымдық сұлбасы
Электр жетегінің механикалық бөліктерінің элементтері және
құрылымдық сұлбасы
Тізбекті электр жетегінің принциптік сұлбасы
Қадағаларды таңдау және негіздеу
Atmega 128 микроконтроллерінің сипаттамасы
Электр қозғалтқышын сапалығын таңдау
Басқарудың негізгі көрсеткіштері
Kомбайнның көлбеу камерасының электр жетегі жүктемесін реттеу
үрдісін теориялық зерттеу және оның жұмыс режимдерін негіздеу
Құрылғының өнімділігін және оның конструкциясының реттелу
параметрлерін таңдау
Комбайнның көлбеу камерасының ауыспалы құрылымды
қосқозғалтқышты асинхронды электр жетегін басқару жүйесін
дайындау
Электржетегінің қозғалысын бақылайтын теңдік
Қозғалтқыштың құрылымдық сұлбасы
Қозғалтқыштың беріліс функциясының анықтамасы
Орындаушы қозғалтқышты және редуктордың беріліс санын таңдау
Ақпаратты - өлшеуіш элементтерін таңдау
Қоршаған орта және еңбек қорғау бөлімі
Электр жетегін пайдалануда техника қауіпсіздігін сақтау ережелері
Электр қауіпсіздігі. Қopғaныстық жерге қосу құрылғысын таңдау
және eceбi
Цехта пайда болатын шу және дірілді азайту бойынша шаралар
қолдану
Экономикалық бөлім
Жиілікті - реттелетін электр жетегінің қолданылу қажеттілігі
Техникалық-экономикалық көрсеткіштерді есептеу
ЖТ - AҚ жүйесін енгізу әсерінен экономикалық пайданың есебі
Қорытынды
Пайдаланған әдебиеттер тізімі
8
12
12
13
15
17
20
21
30
31
32
32
37
38
40
42
47
49
54
54
58
63
66
66
67
71
73
74
Белгілеулер мен қысқартулар
ЖМ - жұмыс машинасы;
БҚ - басқарушы құрылғы;
ЭЖЖ - электр жетек жүйесі;
ЭТҚ - электр түрлендіргіш құрылғы;
ПӘК - пайдалы әсер коэффициенті;
БТ - басқару түзеткіші;
ЭҚҚ - электр қозғалтқышты құрылғы;
ТҚ - таратушы құрылғы;
ОМ - орындаушы механизм;
АҚ - ақпараттық құрылғы;
АБЖ - автомат басқару жүйесі;
АЛҚ - арифметкалы - логикалық құрылғы;
9
Кіріспе
Қазіргі уақытта технологиялық үрдістерді электрлік жарақтандыру,
сонымен қатар автоматтандырылған электр жетегін қолдану деңгейі
айтарлықтай өсуде. Технологиялық үрдістерді электрлендіру және
автоматтандыру, жоғары өнімділікті машиналар, механизмдер және
технологиялық кешендер жасау көптеген жағдайларда электр жетегінің
дамуымен анықталады.
Қазіргі
электр жетегінің дамуының негізгі бағыттарына келесі
аспектілерді жатқызуға болады:
1)
2)
электр жетегі жүйесінің қолданылу аймағын дамыту;
электр жетегінің пайдалану сенімділігін арттыру, энергетикалық
көрсеткіштерін жақсарту және бірегейлендіру бағыттарында электр жетегін
жетілдіру;
3)
жетілдіру;
4)
5)
электр жетегі жүйелерін жобалау және зерттеу әдістерін
реттелмейтін электр жетегінен реттелетін түріне ауысу;
айнымалы ток электр жетегін кеңінен қолдану, оның ішінде
жоғарғы кернеулі орындаудағы ток;
6)
қазіргі заманғы жартылай өткізгіштік түрлендіргіштер және
басқарудың микропроцессорлық құралдарын пайдалану арқылы кешенді
түрдегі электр жетегін дайындау және жасап шығару.
Қазіргі таңдағы электр жетегінің пайдалану аймағын кеңейту электрлік
машина жасау және электрлік аппарат жасау, электроника және түрлендіргіш
техника, есептеуіш техника, автоматика және механика салаларының тұрақты
дамуының әсерінен болады.
Кез келген электр жетегінің құрамына, ол қанша күрделі немесе
қарапайым болса да, міндетті түрде энергияны электр механикалық
түрлендіргіш - электр машинасы кіреді. Басқа құрамдас бөліктері жоқ болуы
мүмкін немесе керісінше, аса дамыған болуы мүмкін - бұл электр жетегінің
қызметіне тәуелді. Сондықтан электр механикалық түрлендіргіштердің электр
магниттік, сыйымдылықтық, үлдірлі, керамикалық, магниттік стрикционды
және басқа да қозғалтқыш түрлерін жаңа құрылымын кеңінен пайдалану және
сипаттамаларын үйрену қажет. Олардың жұмыс істеу принципі магнит және
электр өрісінің ферромагниттік материалдармен, диэлектриктермен,
конденсаторлармен және т. б. өзара әрекеттесу негізінде құрылған.
Қазіргі таңдағы электр жетегінің даму және па йдалану аймағын кеңейту
жолындағы негізгі мәселе электр жетегінің қозғалыс жүйесін зерттеу әдістерін
дайындау, ал кейде барлық электр механикалық жүйені құрастырудың жаңа
принциптерін, толық электр жетегін немесе сипаттамаларды есептеудің жаңа
әдістемелерін құру, есептеуіш техниканы тиімді пайдалану болып табылады.
Қазіргі уақытта энергия және ресурс үнемдеудің өзекті мәселелері
туындауына байланысты электр жетегін дамытудың жаңа бағыттары -
10
энергия үнемдейтін қозғалтқыш қолдану; қоректендіруші желілердегі
шығынды азайту (құрылғының жоғарғы гармоникасын құрайтын реактивті
қуат өтемдеуішін пайдалану) ; қосымша түрлендіргіш құрылғыларды
пайдалану арқылы реттелетін электр жетегіне ауысу.
Қазір таңда электр жетегін әлемдік өндірушілер арасында америкалық
«General Electric», «Robicon», неміс елінің «Siemens», «Bosch», даниялық
«Danfoss», жапониялық «Fanuc», «Omron» және т. б. фирмалар көшбасшылық
етеді. Электр жетегінің дамуына ресейлік
«Электропривод», «Приводная
техника», «Редуктор» топтары және т. б. өзіндік айқын үлесін қосуда.
Электр жетектік жүйені аса қарқынды түрде енгізудің нысаны жеке
қосқышты және реверсті жүйелер, асқын токтық және жоғары жылдамдықты
құрылғылар болып
табылады. Заманауи электр жетектерінің құнының
жарты бағасына жуығы оның ақпараттық және электрлік жабдықталуына
кетеді. Осының барлығы электр жетегінің келешектегі дамуының айқын
екендігін, оның кең ауқымды потенциалды мүмкіндіктерін растайды.
11
1 Технологиялық бөлім
1. 1 Электр жетектерінің жіктелуі
Барлық электр жетектерін бірнеше түрге бөлуге болады: құрылымдық
тағайындалуы бойынша, энергияны бөлу әдісіне, ЖМ білігінің қорғаныс
формасына, тұтынылатын токтың түріне және т. б.
Құрылымдық
тағайындалуы бойынша электр жетегі негізгі және
қосымша болып бөлінеді.
Негізгі жетек ЖМ орындаушы құралының қозғалысын, яғни
технологиялық үрдістің негізгі операциясын қамтамасыз етеді.
Қосымша жетек машинаның қосымша бөлігінің қозғалысын қамтамасыз
етеді. Мысалы, жонғыш білектің негізгі жетегі өңделген дайындамалардың
айналу қозғалысын қамтамасыз етеді, ал қосымша жетек - кескіш бөлшектің
бойлай ілгерілмелі қозғалысы (бойлық беріліс) . Мұндағы жетектерді беріліс
жетегі деп атайды.
Сурет 1. 1 - ЖМ білігінің қорғаныс формасы
Энергияны бөлу әдісіне байланысты электр жетегі бөлінеді:
1 . Топталған: бірнеше ЖМ ( 1. 1 сурет, а ) немесе бірнеше ЖО бір ЖМ-
на (1. 1 сурет, б) берілетін қозғалыс арқылы бір қозғалтқыштан тармақталған
ТҚ торабымен топталған. Топталған электр жетегі әрбір ЖМ-ның немесе
оның ЖБ мақсатты басқару мүмкіндігі жоқтығы, сондай-ақ күрделі ТҚ үлкен
шығындардың болуы сияқты бірнеше кемшілігі бар.
2 .
Жекелеген: ЖМ тек бір ғана қосымша бөлігінің жұмысын
қамтамасыз етеді, маңыздысы ТҚ кинематикалық сұлбасын жеңілдетеді және
оның сенімділігін арттырады, сонымен қатар энергия шығынын азайтады. Бір
12
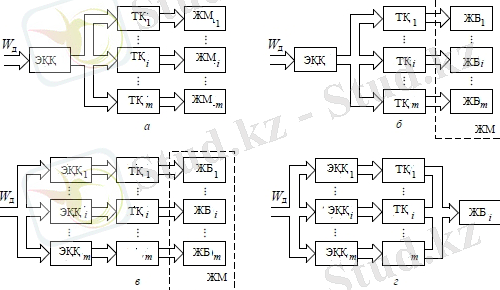
ЖМ үшін бірнеше ЭҚҚ болуына қарамастан жекелеген электр жетегі
заманауи тәжірибеде кеңінен қолданылады. Егер әр ЖО бір ЭҚҚ (1. 1 сурет, в)
әсерінен қозғалысқа келсе, онда жекелеген электр жетегі бір қозғалтқышты
деп аталады. Көп қозғалтқышты жекелеген электр жетегі, механикалық
жолмен қосылған бірнеше ЭҚҚ, бір машинаның білігіне немесе оның ЖО (1. 1
сурет, г) бірігіп жұмыс істеуімен сипатталады;
3 . Өзара байланысқан: бірнеше өзара байланысқан (электрлік немесе
механикалық) электр жетегінің берілген технологиялық үрдістердің басқару
заңымен қамтамасыз етеді (мысалы, басқару жүйесін негізгі жетекпен және
жонғыш білдектегі беріліс жетегі сапалы өңдеудің энергия шығынының
минимумымен немесе өнімділіктің максимумымен қамтамасыз ету) .
Сәйкесінше, бұл басқарылатын құрылғыны (БҚ) күрделендіреді, бірақ
технологиялық процестің аса жоғары деңгейімен автоматтандырылған өзара
байланысқан электр жетегімен қамтамасыздандырады. Өзара байланысқан
электр жетегіне электр байланысының арнайы сұлбасы қолданылатын,
бірнеше ЭҚҚ синхронды айналу жүйесі бар «электрлік білік» деп аталатын
жүйені жатқызуға болады.
Электр жетегі қозғалыс сипатына, ток түріне, жұмыс істеу принципі
және айналу бағытына қарай электр жетегінің айналмалы және ілгерілмелі
қозғалысы, тұрақты және айнымалы тогы, үздіксіз және үзікті әрекеті, айналу
бағытын өзгерте алуы, екі бағытта да қозғалысын бақылайтын, және
реверсивті емес (бірдей бағытталған) болып бөлінеді. ЭЖЖ басқару тәсілі
бойынша автоматты және қолмен басқару, сонымен қатар жергілікті және
қашықтықтан басқару деп бөлуге болады.
1. 2 Электр жетегінің негізгі элементтері және құрылымдық сұлбасы
Электр жетегі жүйесінің (ЭЖЖ) құрылымдық сұлбасын (1. 2-сурет) құру
үшін «электр жетегінің» анықтамасын еске түсіру керек: электр жетегі - бұл
машиналардың және механизмдердің жұмыс бөліктерін (ЖБ) қозғалысқа
келтіруге және осы қозғалыспен мақсатты басқаруға арналған электр
түрлендіргіш, электр қозғалтқыш, электр таратқыш, басқарушы және
ақпараттық құрылғылардан тұратын электр механикалық жүйе.
13
Сурет 1. 2 - Электр жетегі жүйесінің (ЭЖЖ) құрылымдық сұлбасы
Құрылымдық
сұлбада жіңішке сызықтармен басқарушы және
ақпараттық сигналдар, қос сызықпен - энергия ағынын тарату каналдары
белгіленген.
Электр түрлендіргіш құрылғы (ЭТҚ) ЭЖЖ электр энергиясының
көзімен (ЭЭК) байланыстыруға және реттелмейтін параметрлері бар U c, I c
және f c электр энергиясының бір түрін W с басқа U , I және f басқарылатын
бөліктері бар параметрлі W д энергиясына түрлендіреді. Ертеректе ЭТҚ
ретінде аз мәндегі ПӘК-не, үлкен габариттерге және жоғарғы бағаға ие
электрмашиналық құрылғылар, магниттік күшейткіштер пайдаланылған.
Қазіргі уақытта негізінен күштік жартылай өткізгіштік түрлендіргіштер:
тиристорлық басқару түзеткіштері (БТ), транзисторлық кең импулсті
түрлендіргіштер, және транзисторлық және тиристорлық инвенторлар және
қозғалтқыш пайдаланатын электр энергиясы W д кернеуінің параметрлерін
және түрін өзгертуге арналған құрылғылар қолданылады.
Электр қозғалтқышты құрылғы (ЭҚҚ)
электр энергиясын
W қ
механикалық энергияға
W м
түрлендіреді және машиналардың және
механизмдердің жұмыс бөліктерінің берілген түрлерін (таратушы
құрылығымен бірге) қалыптастырады. Қоректендіруші кернеу түріне
байланысты тұрақты ток және айнымалы ток қозғалтқыштары болып бөлінеді.
Айнымалы ток қозғалтқыштары, олардың асинхронды және синхронды
түрлері бірфазалы және үшфазалы болуы мүмкін. Қоректендіруші кернеу
деңгейіне байланысты қозғалтқыштар номинальды кернеуі 1 кВ болатын
төменгі кернеулі және кернеуі 1 кВ асатын жоғарғы кернеулі болып бөлінеді.
Ротордың қозғалыс сипатына байланысты айналмалы,
ілгерілемелі (сызықтық) және үздіксіздік және дискреттік (адымдық)
сипатына байланысты қайтымды-ілгерілемелі қозғалысты болып бөлінеді.
Таратушы құрылғы (ТҚ) ЭҚҚ-дан жұмыс машинасының (ЖМ)
орындаушы механизмдеріне (ОМ) Wо м механикалық энергияның W м қозғалыс
түрлерін түрлендіру үшін және тарату үшін арналған. Осыған байланысты,
14
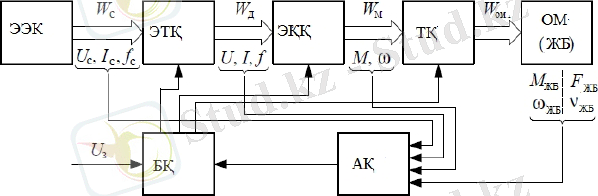
ЖМ механизмдері арқылы Wо м энергиясы ЖБ механикалық энергиясына мына
координаттар бойынша түрленеді: МЖБ - кедергі моменті және wЖБ -
айналмалы қозғалыс кезіндегі бұрыштық жылдамдық немесе FЖБ - кедергі
күші және nЖБ - ілгерілемелі қозғалыс кезіндегі сызықтық жылдамдық.
Басқарушы құрылғы (БҚ) - энергия ағындарын басқару заңдылықтарын
және ЭТҚ және (немесе) ЭҚҚ, немесе ТҚ басқаруды қалыптастыруға
арналған. Заманауи ЭЖЖ-де БҚ оның автоматты (адамның толық
қатысуынсыз болатын) басқару немесе жартылай автоматты
(автоматтандырылған) (операциялардың кейбір бөлігін мысалы, қосу, тоқтату
және реверс сияқты адамның қатысымен болады) басқару жұмысын
орындайтын айнымас бөлігі болып табылады. Сондықтан
автоматтандырылған электр жетегі электр механикалық жүйенің аса кең
таралған түрі болып табылады.
Ақпараттық құрылғы (АҚ) ЭЖЖ координаттарын өлшеу үшін және
оларды электрлік сигналдарға (мысалы, кернеу) түрлендіруге арналған
түрлендіргіш құрылғылардың жиынтығы болып табылады. АҚ ЭЖЖ-де бар
болуына байланысты екі түрлі жүйеге бөледі - тұйықталмаған және
тұйықталған. Тұйықталмаған жүйелерде басқару сигналдары тек БҚ-дан
электр жетегінің күштік бөліктерінің элемененттеріне (ЭТҚ, ЭҚҚ және ТҚ)
жеткізіледі. Тұйықталған жүйелерде АҚ-дан ЭЖЖ жұмысын сипаттайтын
өлшенген шамалар БҚ осыған сәйкес басқару сигналын өндіру үшін
пайдаланылады.
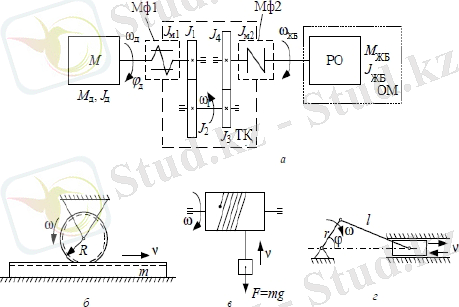
1. 3 Электр жетегінің механикалық бөліктерінің элементтері және
құрылымдық сұлбасы
Құрылымдық сұлбадағы (1. 3 сурет, а) қозғалтқыштың механикалық
бөлігі өзінің қатты қозғалмалы механикалық бөлігі болып саналатын,
айналмалы
якорьмен (тұрақты ток машинасы үшін) немесе ротормен
(айнымалы ток машинасы үшін), инерция моментімен Jд, бұрыштық
жылдамдығымен ω д және электр магниттік моментпен М д сипатталады. ЖБ
қатты қозғалмалы орындаушы механизмі айналмалы қозғалыс кезінде
инерция моментімен JЖБ, бұрыштық жылдамдықпен, ωЖБ және моментпен МЖБ,
ал ілгерілемелі қозғалыста - массамен mЖБ, сызықтық жылдамдықпен νЖБ және
күшпен ҒЖБ сипатталады.
Конструкциясы және құрылымдық орындалуы бойынша ТҚ әркелкі.
Бәсеңдеткіш (1. 3 сурет, а) қозғалыс берілісі кезінде бұрыштық
жылдамдықты ω д дан ωЖБ ға өзгертеді. Бәсеңдеткіштің әрбір элементі өзінің
бұрыштық жылдамдығымен ωі және инерция моментімен Jі, сонымен қатар
таратудың әртүрлі бөліктеріндегі мәндерімен ji = w i /w i +1
сипатталады,
мұндағы ωі және ωі+1 - сәйкесінше, біліктің жүргізетін және жүргізілетін
бұрыштық жылдамдығымен сипатталады.
15
Берілістер тісті дөңгелек-тақтайша (1. 3 сурет, б) және барабан - трос
(1. 3 сурет, в) бұрыштық жылдамдықпен ω радиус R арқылы бабарабанның
айналу жылдамдығын m массалы сызықтық жылдамдық v тақтайшаның
(тросты жүкпен) ілгерілемелі қозғалысына түрлендіреді және келтіру
радиусымен ρ =ν/ω=R сипатталады.
Қос иінді - шатунды механизм (1. 3 сурет, г) қос иінінің тұрақты
бұрыштық жылдамдығы w арқылы айналмалы қозғалысын жылжыманың
қайтармалы-ілгерілмелі қозғалысына ν(t) =ω*ρ(φ) сызықтық жылдамдығы
арқылы түрлендіреді, мұндағы
келтіру радиусы ρ қос иіндінің бұрылу
бұрышының функциясы болып табылады.
Сурет 1. 3 - Электр жетегінің механикалық бөліктерінің құрылымдық
сұлбасы
Ұзақ қашықтыққа қозғалысты тарту үшін икемді байланысқан арқанды,
белдікті, баулы және шынжырлы түрлері қолданылады (1. 3 сурет, г) .
Бірақ жетектің механикалық бөлігінде нақты кинематикалық
байланыстардың өзгерісі және серпімді тербеліс деп аталатын әртүрлі
тербелістерді туғызатын потенциялдық энергияны қайта тарату болуы мүмкін.
Бұдан басқа, саңылау мен люфтының бар болуына байланысты
кинематикалық жұп элементтерінің бір-біріне қатысты өзара ілгерілеуі
мүмкін.
16
Сурет 1. 4 - Статикалық бұрыштық сипаттаманың сызықты емес
элементі
Жалғастырғыш люфтін Мф2 1. 4 - суретте көрсетілгендей статикалық
бұрыштық сипаттаманың сызықты емес элементі деп қарастыруға болады.
Егер жалғастырғыштың жүргізуші бөлігінің бұрылу бұрышының φз бастапқы
моменті φа шамасынан аз болса, онда φз бұрышын үлкейткен кезде ілесетін
бөлігі φм=0 жылжымайтын болады. Олай болмаса, тұрақты беріліс
коэффициенті k бар φм мәнінде өзгеріс болады (1. 4 сурет жалғастырғыш үшін
k =1) : Δφ= k Δφ= k (φ-φ) . Ары қарай координатаның өзгерісі кез келген
тұйықталған жүйе бойынша, мысалға 1🡪2🡪3🡪4 түрінде болуы мүмкін.
Функционалды схеманың серпімді элементтері 1. 4
-
сурет
жалғастырғыш МФ1 және біліктер серпімді күшпен (моментпен) және
кедергілік күшпен (моментпен) сипатталады.
1. 4 Тізбекті электр жетегінің принциптік сұлбасы
Курстық жобадағы техникалық
тапсырма үшін қорытынды жасауды
... жалғасыСіз бұл жұмысты біздің қосымшамыз арқылы толығымен тегін көре аласыз.
- Іс жүргізу
- Автоматтандыру, Техника
- Алғашқы әскери дайындық
- Астрономия
- Ауыл шаруашылығы
- Банк ісі
- Бизнесті бағалау
- Биология
- Бухгалтерлік іс
- Валеология
- Ветеринария
- География
- Геология, Геофизика, Геодезия
- Дін
- Ет, сүт, шарап өнімдері
- Жалпы тарих
- Жер кадастрі, Жылжымайтын мүлік
- Журналистика
- Информатика
- Кеден ісі
- Маркетинг
- Математика, Геометрия
- Медицина
- Мемлекеттік басқару
- Менеджмент
- Мұнай, Газ
- Мұрағат ісі
- Мәдениеттану
- ОБЖ (Основы безопасности жизнедеятельности)
- Педагогика
- Полиграфия
- Психология
- Салық
- Саясаттану
- Сақтандыру
- Сертификаттау, стандарттау
- Социология, Демография
- Спорт
- Статистика
- Тілтану, Филология
- Тарихи тұлғалар
- Тау-кен ісі
- Транспорт
- Туризм
- Физика
- Философия
- Халықаралық қатынастар
- Химия
- Экология, Қоршаған ортаны қорғау
- Экономика
- Экономикалық география
- Электротехника
- Қазақстан тарихы
- Қаржы
- Құрылыс
- Құқық, Криминалистика
- Әдебиет
- Өнер, музыка
- Өнеркәсіп, Өндіріс
Қазақ тілінде жазылған рефераттар, курстық жұмыстар, дипломдық жұмыстар бойынша біздің қор #1 болып табылады.

Ақпарат
Қосымша
Email: info@stud.kz