Автоматты басқару жүйесін құру: ұғымдары, құрылымы және есептеу негіздері

Кіріспе
Курстық жұмыстың тақырыбы: «Автоматты басқару жүйесін құру». Курстық жұмыстың мақсаты: АБЖ-сінің негізгі ұғымдары мен құрылымы, статикасы мен сипаттайтын параметрлерін анықтау; автоматты басқару жүйесін құруды қарастыру.
Курстық жұмыс өзектілігі: АБЖ - объектіні адамның қатысуынсыз, автоматты түрде басқару болып табылады. Оны құру және негізгі түсініктерін ажырата білу өте өзекті болып саналады. Автоматтық басқару - қандай да бір объектіні (машинаны, приборды, жүйені, процесті) берілген алгоритмге сәйкес адамның тікелей қатысуынсыз басқарудың механизмін білу өте маңызды.
Курстық жұмыс кіріспеден, технологиялық бөлімнен, конструкторлық бөлімнен, есептеу бөлімінен, еңбекті қорғау және қауіпсіздік ережелері бөлімінен, қорытындыдан және пайдаланылған әдебиеттер тізімінен тұрады. Курстық жұмыс 33 беттен тұрады.
Курстық жұмыстың бірінші бөлімінде, яғни, технологиялық бөлімде автоматты басқару жүйесі туралы жалпы түсініктері туралы жазылған.
Курстық жұмыстың екінші бөлімінде, яғни, конструкторлық бөлімде автоматты басқару жүйесінің схемасы мен көрсетілуі және статикалық параметрлері мен қолданыстағы жүйелер туралы толықтай жазылған.
Курстық жұмыстың үшінші бөлімінде, яғни, есептеу бөлімінде автоматты басқару жүйесін құруға қажетті есептеулер мен өлшемдердің шешімдеріжазылған.
Курстық жұмыстың төртінші бөлімінде, яғни, еңбекті қорғау және қауіпсіздік ережелері бөліміндеавтоматты басқару жүйесін құрукезіндегі қауіпсіздік ережелері туралы жазылған.
Курстық жұмысты жазу кезінде қолданған әдебиеттер пайдаланылған әдебиеттер тізімінде көрсетілген.
I. Технологиялық бөлім
Автоматты басқару жүйесі туралы жалпы түсінік
- Автоматты басқару жүйесі
Ғылым мен техниканың дамуы, технологиялық процестердің күрделенуі, шығарылатын өнімдерге қойылатын талаптардың жоғарылауы автоматты басқару жүйелерін құруда қазіргі таңға сай математикалық әдістерді пайдалануды қажет етеді.
Басқару жүйесін құру үшін маман ең алдымен басқарылатын объектінің математикалық моделін тұрғыза білуі керек. Ал бұл есепті экспериментті және аналитикалық жолдармен шешуге болады.
Кез-келген өндірісте технологиялық процестер белгілі-бір мәнде шектетілетін физикалық шамалармен сипатталады. Жабдықтардың жұмысы кезінде ол шамалар белгілі бір деңгейде тұрақтануы, не берілген программа бойынша өзгеріп отыруы тиіс. Кез-келген қондырғыда технологиялық процестің бірқалыпты жүруі белгілі бір ереженің, қызмет байланысты болады. Осы қызмет алгоритмін орындау үшін белгілі бір сыртқы команданы орындайтын қондырғыны, не машинаны басқару объектісідейді.

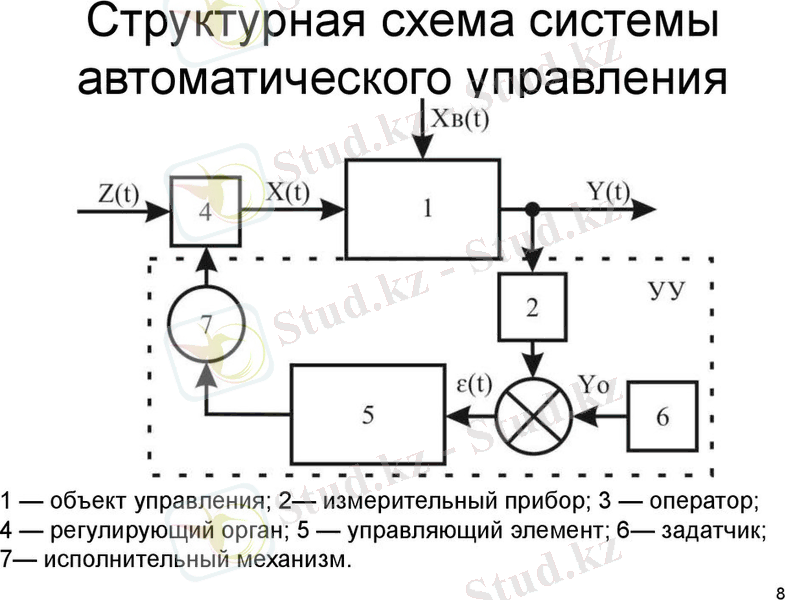
1-сурет. Автоматты басқару жүйесі
Технологиялық процесті жүргізу үшін басқару объектісіне әсер ететін тиімді ықпалды басқарудейді. Егер бұл басқару адамның қатысуынсыз жүзеге асса, оны автоматты, ал адамның қатысуымен болса қолмен басқарудеп атайды. Жалпы технологиялық процестер орындалатын барлық өндіріс жабдықтары басқару объектілеріне жатады. Алайда технологиялық процестің өзі де басқару объектісі бола алады. Әр объектіде физикалық шаманың берілген мәнін тұрақтандырып, немесе оны берілген бағытта өзгертіп отыратын басқарғыш құрылғысы болады. Басқарғыш органы арқылы объектіге белгіленген қызмет алгоритмін орындауға мүмкіндік беретін арнайы әсерлер беріліп отырады. Технологиялық процесті берілген қызмет алгоритмі бойынша өткізу мақсатында объектіге сырттан берілетін арнайы нұсқаулар (ережелер) жиынтығын басқару алгоритмідейді.
Технологиялық процеспен немесе өндірістік объектімен басқару жүйесін құрастырғанда, жүйеге кіретін басқару объектісінің, басқарылатын құрылғының және басқа да элементтердің математикалық сипаттамасы болуы қажет. Осы жүйеге кіретін элементтерді автоматты басқару жүйелерінің (АБЖ) буындары деп атаймыз.
Автоматты басқару жүйесі еңбек өнімділігін, басқарудың сапалылығы мен дәлдігін арттыру үшін, қолайсыз жерлердегі немесе денсаулыққа залалды жұмыстарды адамның қатысуынсыз атқару мақсатында қолданылады. Басқару мақсаты басқарылатын объектінің реттелу шамасының уақыт бойынша өзгеруімен тікелей байланысты. Басқару мақсатын жүзеге асыру үшін басқарылатын әр түрлі объектілердің өзіндік ерекшеліктері ескеріліп, объектіні басқару тетігіне әсер етерліктей әрекет (басқарғыш әрекет) жасалады.
Басқарғыш әрекет басқару қондырғылары арқылы жүзеге асырылады. Өзара әрекетке түсетін басқару қондырғылары мен басқарылатын объектілер жиынтығы басқарудың автоматтандырылған жүйесін құрайды. Бұл негізінен өндірістік т. б. кешендер құрамына кіреді. Уатт бу машинасындағы (1784) центрден тепкіш реттеуіштен тұратын автоматты реттеу жүйесі техникада кеңінен пайдаланылған алғашқы тұйық басқарудың автоматты жүйесі болды. 20 ғасырдың 50-жылдарында өндірістік процестер мен өнеркәсіптік кешендерді электрондық есептеуіш машиналар арқылы басқарудың күрделі жүйелері дүниеге келді.
Бұл жүйелер тобына басқарылатын шаманың мәнін тұрақты етіп сақтайтын автоматты реттеу жүйесі, басқарылатын шаманы белгілі бағдарлама бойынша өзгертіп отыратын жүйе, басқару бағдарламасы алдын ала берілмеген қадағалауыш жүйе енеді.
2-сурет. Автоматты басқару жүйесі схемасы
Басқарудың автоматты жүйелері техниканың түрлі салаларында (көшірмелеуіш фрезалау станогын басқаруға арналған қадағалауыш жүйе, металл кескіш станоктардағы магниттік лента, перфолента немесе перфокарта арқылы бағдарламамен басқаруға арналған жүйе) кеңінен пайдаланылады. Ол авиацияда, ғарыш және әскери техникада үлкен маңыз атқарады.
Басқарудың автоматтандырылған жүйесін құру принциптерін және оларда өтетін процестердің заңдылықтарын зерттейтін техникалық кибернетиканың бөлімі -автоматты басқарудың теориясы. Ол бірнеше бөлімге (сызықтық, сызықтық емес жүйелер, үздіксіз функциясы, дискретті функциялы, релелі, инвариантты, оптимальды, экстремальды, үлкен жүйелер теориясы, жүйелердің сезгіштік теориясы) бөлінеді.
Негізгі проблемасы - басқарудың автоматтандырылған жүйесін синтездеу және анализдеу. Автоматты басқару тек математикамен ғана емес, физикалық және техникалық ғылымдарымен тығыз байланысты. Қазақстанда автоматты басқару теориясынан зерттеулер 60жылы басталды (Қазақстан Республикасы Ғылым Академиясы, Қаз ҰМУ, ҚазҰТУ, Қарағанды политехникалық институты т. б. ) . Республикада автоматты басқару теориясының негізін А. Қ. Беделбаев салды.
- Автоматты басқару жүйелері туралы негігі түсініктер
Автоматты жүйелер арналуына және конструкторлық орындалуына қарай әртүрлі болады. Оларды негізгі 2 бөлшектерге бөлуге болады:
- Басқарылатын объект (БО)
- Басқару құрылғы (БҚ)
Оларды функционалдық схемада келесідей көрсетуге болады:
кіріс шығыс
кіріс шығыс
Нұсқамалармен сигналдың өту бағыты көрсетіледі.
БО- техникалық (технологиялық) процесті жүзеге асыратн құрылғы немесе құрылғылар жиынтығы. БО жылжитын және жылжымайтын болуы мүмкін. АБЖ жылжитын объектісіне келесілер жатады: кемелер, поездар, ұшқыштар, ракеталар, ғарыштар. Жылжымайтын объект: агрегаттар, механизмдер, технологиялық және энергетикалық процестер, қондырғылар (бу пештері, айнымалы пештері) .
БҚ (автоматты реттеуіш, жай реттеуіш) белгілі заңға (алгоритмге, бағдарламаға) сәйкес басқарылатын объектіге әсер етіп тұратын, техникалық құрылғыны айтады.
Мысал: ұшқыштағы және ракеталардағы автопилоттар, басқарушы, ЭЕМ.
Қандай болмасын өндірістік қондырғыларда, машиналарда, аппараттарда өтетін түрлі техникалық процессті бір немесе бірнеше көрсеткіштермен сипаттауға болады. Сол көрсеткіштер әртүрлі механикалық, физикалық, химиалық шамалар болып келеді. Мысалы: жылдамдық, жол, уақыт, қысым, температура, көлем. Олар нақтылы жағдайға байланысты белгілі бір заңға сәйкес өзгеруі не тұрақты болуы мүмкін. Басқару тәжірибесінде оларды процестің параметрлер координаталары немесе басқарылатын объектінің шығу шамалары дейді. Басқарылатын параметрлер деп шығу параметрлерінің арасындағы параметрлерді айтады, егер реттеу процессі сол бойынша жүргізілсе.
Реттелінетін шаманың өзгерісін тудыратын әсерлер басқару және ауытқушы болып бөлінеді. Реттелетін шаманың өзгерту заңдылығын анықтайтын және басқару құрылғымен өндірілетін әсер - бұл басқару әсері. Ал басқару әсерімн реттелетін шама арасындағы байланысқа ықпал ететін барлық басқа әсерлер ауытқушы әсерлерге жатады. Егер объектіге әрекет ететін әсерлердің және реттелетін шамалардың саны бірден бір болса келесідей болады.
3-сурет. Конструкторлық сұлба
u - басқару әсері
f - ауытқушы әсер
y - басқарылатын шама
Егер басқарылатын объектінің кіру және шығу шамасының саны 1-ден көп болса
Басқару әсерледің және басқару шамалардың санына қарай басқарылатын объектілер бір байланысты немесе көп байланысты болып бөлінеді.
Реттелетін шамалардың объектіде берілген деңгейде ұстап тұру үшін немесе оларды берілген заңдылық бойынша өзгерту үшін реттегіштер мен қосымша құрылғылар орнатылады, олар реттелетін объектімен бірге реттелетін шамасы бірнеше автоматты реттеу жүйесін тудырады.
Реттелетін шамалары бірнеше жүйелер байланыспаған және байланысты реттеу жүйелеріне бөлінеді. Байланыспаған реттеу жүйелері дегеніміз әртүрлі шамаларды реттеуге арналған реттегіштері бір - бірімен байланыспаған және тек өздеріне ортақ реттелетін объект арқылы ғана өзара әрекет етуі мүмкін жүйелерді айтамыз.
Байланыспаған реттеу жүйелері тәуелді және тәуелсіз болып бөлінеді. Тәуелді деп кез - келген реттелетін шаманың өзгерісі өзінен кейін барлық қалған реттелетін шамалардың өзгеруіне алып келетін жүйелерді айтамыз. Мысалы, қазандағы су деңгейінің өзгерісі өзінен кейін бу қысымы мен температурасының өзгеруіне алып келеді; бу қысымының өзгерісі өзінен кейін су температурасы мен деңгейінің өзгеруіне алып келеді. Тәуелсіз деп кез - келген бір реттелетін шаманың өзгерісі басқа реттелетін шамалардың өзгеруін тудырмайды. Мысалы, жеке жұмыс істеп жатқан генератордың кернеуінің өзгерісі өзінен кейін айнымалы ток жиілігінің өзгеруін болдырмайды.
Тәуелсіз жүйелердегі жеке шамаларды реттеу процестерін оқшаулана қарастыруға болады, оларды реттелетін шамасы біреу жүйелер үшін алдыңғы тарауларда берілген әдістермен синтездеуге және талдауға болады.
Байланысты реттеу жүйелері деп әртүрлі реттелетін шамалардың реттегіштері бір - бірімен және реттелетіні объектімен бірге конструктивті түрде байланысатын жүйелерді айтамыз.
Байланысқан реттеу жүйелері мен байланыспаған реттеудің тәуелді жүйелері, яғни реттелетін шамалар бір - бірімен байланысқан барлық жүйелер көпбайланысты реттеу жүйесі деп аталады. Бұл жүйелерге келесі анықтама берілуі мүмкін.
Көпбайланысты деп бір - бірімен реттеуші объект, реттегіш немесе жүктеме арқылы байланысқан бірнеше реттелетін шамалары бар автоматты реттеу жүйелерін айтамыз.
Байланысты реттеу жүйелеріндегі реттегіштер арасындағы байланыстар әртүрлі түрде тұрғызылуы мүмкін. Бұл байланыстар шамалардың кез - келгені өзгерген кезде олардың арасында тұрақты қатынасты қамтамасыз ете алады, барлық реттелетін шамалардың кез - келгені өзгерген кезде реттеу автономдығын қамтамасыз ете отырып өзгермейтіндігін де қамтамасыз ете алады.
Автономды реттеу жүйесі дегеніміз реттеу процесінде бір реттелетін шаманың өзгерісі басқа реттелетін шамалардың өзгеруін тудырмайтын реттегіштер арасындағы байланыстары бар көпбайланысты жүйені айтамыз.
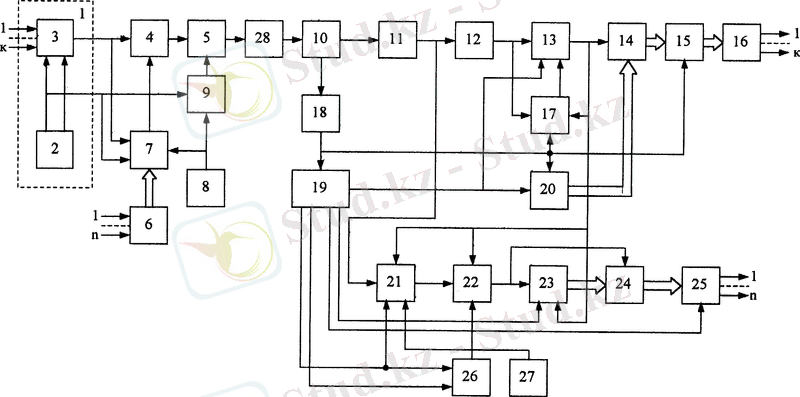
4-сурет. Көпбайланысты басқару жүйесі
Көпбайланысты жүйелерді бір реттелетін шамасы бар жүйелердің қарапайым қосындысы ретінде қарастыруға болмайды. Көпбайланысты жүйелерге арнайы теория өңделіп шығарылған, онда осындай жүйелерді зерттеудің арнайы әдістері ұсынылады. Көпбайланысты жүйелерді зерттеу негізінде қойылған принциптерді қарастырайық. Көпбайланысты автоматты реттеу жүйе объектілерінде әрбір реттелетін шамасы бойынша өзінің жеке шығыс бар. Кіріс саны шығыс санынан кіші болуы тиіс, кейбір жағдайларда кірістер шығысқа қарағанда көп болуы мүмкін, әрбір реттелетін шама бойынша өзінің реттеу жүйесі пайда болады және осы кезде әрбір реттелетін шамаға бір орындаушы орган мен бір реттегіш сәйкес келуі тиіс. Реттелетін объект санымен қатар сыртқы әсерлерге душар болады, олар барлық немесе тек кейбір реттелетін шамаға әсер етеді. Одан бөлек, көпбайланысты жүйенің барлық реттелетін шамалары бір - бірімен өзара әрекет етеді. Көпбайланысты жүйелердегі реттеу процесінің математикалық бейнесі жеткілікті күрделі болып шығады. Математикалық өрнектерін біршама жеңілдету үшін дифференциалды теңдеулер жүйесінің матрицалық түрде жазылуы қолданылады.
Көпбайланысты жүйенің жалпы түрдегісін қарастырайық, онда үш реттелетін шама жүзеге асырылады. 5-суретте реттелетін объектінің матрицалық түрдегі теңдеуі берілген. шамалары кірістер, шығыстары болып табылады. Матрицаның А әрбір элементі шығыс шаманы кіріс шамамен байланыстыратын беріліс функцияны береді. Келтірілген матрица барлық шығыс шамалар барлық кіріс шамаларымен байланысқаны шығады. Содан, мысал, беріліс функциясы шығыс шаманы кіріс шамамен, ал беріліс функциясы пен ні байланыстырады. Барлық кіріс шамаларға тәуелді шығыс шаманы алу үшін кіріс шамаларды сәйкес жолдағы беріліс функцияға көбейтіп, және туындыларын қосу керек. 5-суреттегі объект үшін үш теңдеу жүйесін аламыз, ол Лаплас бейнесі бойынша құрылған:
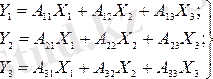
5-сурет. Реттелетін объектінің матрицалық түрдегі теңдеуі
Алғашқыда ол, техникалық объекттерді автоматты басқару процестерінің статикасы мен динамикасын зерттеу үшін пайда болды. Автоматты басқару теориясының қорытындылары мен нәтижелері техникалық сипаттағы басқару жүйелерімен қатар экономикалық, ұйымдастырушылық және т. б. жүйелердің динамикалық қасиеттерін зерттеу үшін де қолданылуда.
Белгілі бір заңға сәйкес шаманың тұрақтылығын қамтамасыз ету қажеттігі техниканың әртүрлі салаларында пайда болады. Технологиялық және өндірістік процестердің қалыпты өтуі, осы процестерді сипаттайтын шамалар белгілі шарттарға жауап бергенде ғана қамтамасыз етіледі. Әртүрлі процестер өтетін объекттер жиі жағдайда олардың қалыпты өтуін қамтамасыз етпейді, демек, объекттердің өздері әртүрлі себептермен пайда болатын режимнің ауытқуын жоя алмайды. Сондықтан, мұндай объекттер, әсер ету арқылы олардың жұмыс режимін өзгертуге, демек, процесті қажетті түрде басқаруға болатын басқарушы немесе реттеуші органмен жабдықталады. Техникалық процесті автоматты басқаруды іске асыру үшін басқарылатын объект пен онымен байланысты басқарушы құрылғыдан тұратын жүйе құрылады. Мұндай жүйе инерциялық қасиеттері мен бөгеуілдерге қарамастан оған қойылған функцияларды қажетті дәлдікпен орындауы керек.
II. Конструкторлық бөлім
Автоматты басқару жүйесінің негізгі құрылымы
- Автоматты басқару жүйесінің блок-схемасы мен көрсетілуі
Басқарылатын процесстер қандай объектілермен байланысты екеніне тәелсіз. Жалпы түрде АБЖ блок-схемасын келесідей көрсетуге болады.
6-сурет. АБЖ блок-схемасы
g(t) - тағайындағыш әсер
Блок-схемаға сәйкесті реттеуіштің кірісіне тағайындалған g(t) реттелінетін және ауытқушы шамалар келіп түседі. Реттеуіш келіп түскен ақпарат бойынша басқару әсерін шығарып, БО-ге әрекет етеді. Процесс жүрісі туралы объектіден ақпарат алу үшін сезгіш элемент немесе датчиктер қолданыады. Датчиктің міндеті физикалық шаманы бір түрден екінші түрге түрлендіру.
Автоматты басқару жүйесінің көрсетілуі. АБЖ әдетте структуралық схемалармен көрсетіледі. Стрктуралық схема жүйенің құрамын элементтер арасындағы байланысын көрсетеді. Структуралық схема арқылы жүйенің ішкі құрылымын анықтауға жүйедегі өтетін динамикалық процесстің сапасын жақсартатын қосымша байланыстардың қосу орнын табуға болады.
7-сурет. АБЖ структуралық схемасы
СЭ - салыстыру элементі
АР - автоматты реттеуіш
АТМ - атқару механизмі
РО - реттеу органы
БО - басқару объектісі
ӨЭ - өлшеу элементі
КҚ - коррекциялаушы құрылғы
y(t) - реттелетін шаманың нақты мәні
E(t) - реттеу қателігі
y(t) -дан ОЭ мен өлшеніп оның g(t) тағайындалған мәнмен салыстырылады. СЭ реттеу қателігін E(t) =g(t) -y(t) анықтайды. Ол қателік реттелінетін шаманың ауытқуы. Ол ауытқу жүйеге әрекет етіп тұратын f(t) -дан сыртқы ауытқушы әсердің ықпалынан пайда болады. Егер жүйеге сыртқы ауытқушы әсер әрекет етпесе, онда ешқандай реттеудің қажеті жоқ. Табылған қателік бойынша E(t) АР өзінің реттеу алгоритміне сәйкесті u(t) -дан басқару әсерін өндіреді. Ол әсер АТМ мен РО арқылы БО-ға әрекет етеді. Әдетте тұйықталған жүйеге әртүрлі кері байланыстар және жзүйенің сапасын жақсарту үшін енгізілетін коррекциялаушы құрылғылар кіреді. (КҚ1, КҚ2) . Ондай жүйенің мақсаты реттелінетін шаманың нақты мәнімен тағайындалған мәннің аралығындағы айырымды нөлге келтіру. Структуралық схемадағы реттелінетін шаманың мәні ОЭ арқылы СЭ-ке келіп түсетін тізбек негізгі кері байланыс тізбегі деп аталады. Негізгі кері байланыстан басқа жүйеде ішкі кері байланыстар да болуы мүмкін. Егер негізгі кері байланыстың сигналы реттелінетін шаманың тек қана пропорционалы болса, онда кері байланыс қатаң кері байланыс деп аталады. Ал айтылған сигнал реттелінетін шаманың өзгерісіне және оның туындыларына пропорционалы болса, ондай кері байланыс иілгіш кері байланыс деп аталады.
Тұйықталған АБЖ тағайындалған шаманың өзгеру түрі бойынша келесідей жіктеледі:
1. тұрақтандыру (стабилизациялау)
2. бағдарламалы басқару жүйелеріне
3. қадағалаушы жүйелерге
Тұрақтандыру жүйелеріне егер тағайындалған шаманың мәні тұрақты болса, g(t) =const. Егер бір тағайындалған шама бойынша, бір реттелінетін шама тұрақтанса, ондай жүйе бір контурлы тұрақтандырулы жүйе деп аталады. Егер тұрақтандыру шаманың саны көп болса, көпконтурлы деп аталады.
2. Бағдарламалы басқару жүйе, егер тағайындалған шаманың мәні уақыт өзгерген сайын кейбір белгілі заң және бағдарлама бойынша өзгеріп тұратын болса. Осындай жүйелердің бағдарламалары екі түрде болуы мүмкін:
1. уақыттық бағдарлама g=g(t)
2. параметрлік бағдарлама g=( )
3. Қадағалаушы жүйелер, егер g(t) уақыттық функциясы алдын-ала белгісіз болса. Әдетте қолданушы жүйеде реттелінетін шама кейбір сыртқы фактордың өзгеруінен пайда болатын тағайындалған шаманың өзгерісін қайталап, қадағалап тұру тиісті.
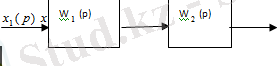
Үзбелер тізбектей қосылады дейді, егер соңынан тұрған кіру шамасы алдындағы үзбенің шығу шамасы болса.
8-сурет. Конструкторлық сұлба

Жалпы жағдайда
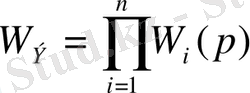
Тізбектей қосылған үзбелердің эквиваленті түрлендіру функциясы барлық үзбелердің түрлендіру функциясының көбейтіндісіне тең.
Кері параллель қосу
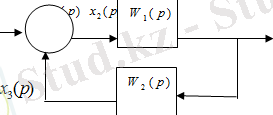
9-сурет. Конструкторлық сұлба
Үзбе кері параллель қосылған деп аталады, егер әр үзбенің шығысы басқа үзбенің кірісімен қосылса.


Сонымен кері параллель қосудың түрлендіру функциясы бөлшекке тең. Оның алымы тура бөліктің түрлендіру фуекциясы болып келеді де, ал бөлгіші + тұйықталмаған жүйенің түрлендіру функциясы болады, егер кері байланыс кері болса, немесе 1-тұйықталмаған жүйенің түрлендіру функциясы болады егер кері байланыс оң болса.
- Автоматты басқару жүйесінің теңдеулері
Жүйе жобалау стратегиясында басқару процессі дифференциалдық, интегралдық және алгебралық теңдеулер арқылы зерттеледі, яғни математикалық модель арқылы. Ондай зерттеудің мақсаты анализ және синтез мәселесін шешу.
1. Анализ. Жүйе өзінің структурасымен және параметрлерімен беріледі де, зерттеу мақсаты оның қасиеттерінің орнықтылығын, дәлдігін анықтау.
2. Синтез. Жүйенің қажетті қасиеттері беріледі де, ал зерттеу мақсаты сол қойылған талаптарды қанағаттандыратын жүйенің структурасын және параметрлерін анықтау. Жүйенің математикалық жазуында инерционды элементтері дифференциалдық, интегралдық немесе алгебралық теңдеулермен жазылады. Оларды динамикалық теңдеулер деп атайды. Инерционды емес элементтер және сыртқы әсерлер тұрақты түрде әрекет етсе, (жүйенің тұрақталынған режимі) алгебралық теңдеулермен жазылады. Оларды статика теңдеулер деп атайды. Басқару жүйесінің динамикалық теңдеулерін құруда (математикалық моделін анықтауда) күрделі жүйе шартты түрде жеке әрекеті бағытталған үзбелерге бөлінеді. Үзбедегі өтетін процессті анықтайтын физикалық заңға негізделеді. Сөйтіп олардың әрқайсысына теңдеулер құрылады.
Автоматты жүйелердің негізгі басқару заңдары. Реттеу заңы деп E(t) жүйе қателігі тағайындалған әсер y(t), f(t) ауытқушы әсер бойынша басқару құрылғы u(t) басқарушы әрекетті қалыптастыратын математикалық тәуелділікті немесе алгоритмді айтады.
Алгоритмнің жалпы түрі:
u(t) =F[g(t), E(t), f(t) ]
F бейсызықты функция (көрсетілген шамалардан және олардың туындылырынан) u(t) =F
 [g(t) ] +F
[g(t) ] +F
 [E(t) ] +F
[E(t) ] +F
 [f(t) ] біз тек мына түрін қарастырамыз u(t) =F[E(t) ] .
[f(t) ] біз тек мына түрін қарастырамыз u(t) =F[E(t) ] .
Келесі заңдар бар:
- Пропорционалдық заң П
u(t) =k
- Интегралдық заң И
немесе
- Пропорционалды интегралды заң ПИ

- Пропорционалды интегралды дифференциалды заң ПИД

- дифференциалдаудың уақыттық туындысы
2. 3 Сызықты дифференциалдық теңдеулерді жазу формасы
f(t)
x(t) y(t)
10-сурет. Конструкторлық сұлба
Жүйенің басқарылатын объектілер үзбелері еркін ретті дифференциалдық теңдеумен жазылады.
 динамикалық (1)
динамикалық (1)
Мұндағы y - үзбенің шығу шамасы
x, f - кіру шамалары
 - уақыт бойынша шаманың бірінші туындысы
- уақыт бойынша шаманың бірінші туындысы
 - уақыт бойынша шаманың екінші туындысы
- уақыт бойынша шаманың екінші туындысы
- формула жүйенің динамикалық теңдеуі
x=x
f=f тұрақты кіру шамаларында үзбеде біраз уақыттан кейін процесс тұрақталады дейік. Онда шығу шамасы y=
мәнінде тұрақталынады. Бұл жағдайда (1) формула былай жазылады.
 статикалық (2)
статикалық (2)
Сіз бұл жұмысты біздің қосымшамыз арқылы толығымен тегін көре аласыз.
- Іс жүргізу
- Автоматтандыру, Техника
- Алғашқы әскери дайындық
- Астрономия
- Ауыл шаруашылығы
- Банк ісі
- Бизнесті бағалау
- Биология
- Бухгалтерлік іс
- Валеология
- Ветеринария
- География
- Геология, Геофизика, Геодезия
- Дін
- Ет, сүт, шарап өнімдері
- Жалпы тарих
- Жер кадастрі, Жылжымайтын мүлік
- Журналистика
- Информатика
- Кеден ісі
- Маркетинг
- Математика, Геометрия
- Медицина
- Мемлекеттік басқару
- Менеджмент
- Мұнай, Газ
- Мұрағат ісі
- Мәдениеттану
- ОБЖ (Основы безопасности жизнедеятельности)
- Педагогика
- Полиграфия
- Психология
- Салық
- Саясаттану
- Сақтандыру
- Сертификаттау, стандарттау
- Социология, Демография
- Спорт
- Статистика
- Тілтану, Филология
- Тарихи тұлғалар
- Тау-кен ісі
- Транспорт
- Туризм
- Физика
- Философия
- Халықаралық қатынастар
- Химия
- Экология, Қоршаған ортаны қорғау
- Экономика
- Экономикалық география
- Электротехника
- Қазақстан тарихы
- Қаржы
- Құрылыс
- Құқық, Криминалистика
- Әдебиет
- Өнер, музыка
- Өнеркәсіп, Өндіріс
Қазақ тілінде жазылған рефераттар, курстық жұмыстар, дипломдық жұмыстар бойынша біздің қор #1 болып табылады.

Ақпарат
Қосымша
Email: info@stud.kz