Автоматты басқару теориясы: негіздер, жүйелерді талдау мен синтездеу және радиоэлектронды қолданбалар

Кіріспе
Автоматты басқару теориясы - инженерлік мамандықтарға арналған жалпы техникалық курс. Бұл пән автоматты басқару теориясын оқытады, басқару жүйелерінің қызмет ету принциптерін қамтамасыз ететін негізгі теориялық мәліметтер береді.
Автоматты басқару теориясы автоматты басқару жүйелерін зерттеу тәсілдерін және жобалау негіздерін оқытады. Автоматты басқару теориясы ұғымы келесі терминдердің жиынтығынан тұрады:
• теория - белгілі бір жағдайларда нақты нәтиже алуға арналған мәліметтер жиынтығы
• басқару - белгілі бір мақсатқа жету үшін нысанға берілетін әсер
автоматты басқару- адамның араласуынсыз техникалық жабдықтардың көмегімен басқару
АБТ-ң негізгі жағдайларын оқыту және басқару жүйелерін дұрыс, нақты эксплуатациялауға жеткілікті мөлешерде анализдеу және синтездеу тәсілдерімен таныстыру. Автоматтандырудың мақсаты технологиялық процестерді жүзеге асыру (ТП) болып табылады. ТП деп технологиялық операциялардың жиынтығын айтады. Тенологиялық нысаныды басқару - аппарат, агрегат немесе өнеркәсіпке автоматтандырылған жүйені қосу деп аталады. Автоматты реттеу жүйесінің динамикасын талдаумен байланысты кез-келген есепті шешу үшін ең алдымен зерттелетін жүйенің математикалық бейнесін беру қажет. Оны төмендегі ретпен жүргізеді:
1. Автоматты реттеу жүйесін (АРЖ) элементар буындарға бөледі)
2. Элементар буындардың қозғалыс теңдеуін құрады;
3. Қозғалыс теңдеулерді сызықтайды;
4. Өлшемсіз координаттар енгізеді.
Қозғалыс теңдеуі деп берілген кірістік координаттың уақыт бойынша өзгеруіне сәйкес шығыс координаттық да уақыт бойынша өзгеруін анықтайтын дифференциалдық теңдеуін айтады. Ішкі әсер ТНБ жұмысын бұзады, сондықтан нормальды функционалданған жағдайды ұстап тұру үшін БТН бақылап (басқарып) отыру қажет. Басқару процесі мынаны қарастырады:
1. БН ағымдағы жағдайы жөнінде ақпараттар жиыны.
2. Нысанның оптималды режимде функционалдау анықтамасы
3. Басқарушы әсерді есептеу
4. Оптималды басқаруды ұсыну
Автоматты басқару теориясындағы пайдаланылатын барлық мәселелерді екі үлкен класқа біріктіруге болады-автоматты жүйелерді талдау және синтездеу
мәселелері.
Жүйені талдау деп - толық белгілі бір құрылымдық схемасы және берілген параметрлері арқылы оның статикалық немесе динамикалық қасиеттерін атайды.
Жүйенің синтезі деп- автоматты реттеудің белгілі сапа көрсеткіштері бойынша оның құрылымдық схемасын, элементтері арасындағы байланыстарды анықтауды айтады.
Жалпы автоматты реттеу жүйесі бір-бірімен өзара байланысты реттелуші нысанДмен реттеуші органнан тұрады. Бұл жүйені құрар алдында сериялық жабдықтар каталогын реттеуші органды, орындаушы құрылғыны, датчикті таңдап алады. Бұл элементтер реттелуші нысанменл бірге жүйенің өзгермейтін(берілген) бөлігін құрайды. Соңынан, жүйенің статикалық және динамикалық сипаттамаларына қойылатын талаптар негізінде оның фукнционалдық және корректирлеуші құрылғылардан тұратын өзгемелі бөлігінанықтайды. Корректирлеуші құрылғылар жүйенің контурына тізбектеле, параллель немесе кері байланыс түрінде қосылып, оның динамикалық қасиеттерін жоғарлатуға мүмкіндік туғызады.
1. 1 Негізгі түсініктер мен анықтамалар
Басқару - бұл алға қойылған мақсат үшін басқару аймағына оған кедергі болатын қарсы шарттар бар кезде толықтай әсер ететін процесс. Басқару келесі ұғымдармен байланысты: - басқару объектісі (аймағы) ; - басқару мақсаты; - басқарушы құрылғы; - басқарушы әсер. Басқару процесі орындалатын аймақ басқару аймағы деп аталады. Басқару функциясын іске асыру процесі үшін басқарушы құрылғы пайдаланылады. Басқару бойынша мүмкін болатын барлық операцияларға (әрекеттерге) адам қатыспаса, онда автоматты басқару құрылғысы деп аталады. Басқару аймағы мен автоматты басқарушы құрылғы бір-бірімен әсер ете отыра автоматты басқару жүйесін (АБЖ) құрайды. Әр автоматты басқару жүйесі бір-бірімен жалғанған тұтастай буындар қатарынан тұрады. Буын - элементтің математикалық моделі немесе жүйенің кез келген бөлігі. Кейбір жағдайларда басқару реттеу болып табылады. Өзгеретін және тұрақтандыруға жататын аймақтың параметрлері реттелетін параметрлер, ал осы параметрлер реттелетін аймақты реттеу аймағы деп аталады. Қандай да бір қажетті заң бойынша өзгеретін реттелетін параметрлер немесе әр түрлі аймақтарда реттелетін параметрлердің тұрақты мәнінде автоматты түрде ұстап тұруға арналған құрылғы автоматты реттеуіштер деп аталады. Реттеу аймағының автоматты реттеуішпен байланысын автоматты реттеу жүйесі (АРЖ) деп айтады. Реттелетін аймақ пен автоматты реттеу автоматты реттеу (АР) жүйесінің элементтері болып табылады. Автоматтты басқару жүйесін тұрақтандыру, бағдарламамен басқару, қадағалау деп бөледі. 6 Басқарылатын шаманың мәнін тұрақты мәнде ұстап тұратын автоматты басқару жүйесі тұрақтандыру (стабилдеу) жүйесі деп аталады. Оларды әр түрлі физикалық шамаларды тұрақтандыру үшін қолданылады. Автоматты басқару жүйесінде алдын ала берілген бағдарлама бойынша өзгеретін басқарылатын шаманың мәні бағдарламалық басқару жүйесі деп аталады. Басқарылатын шаманың өзгеру заңы белгісіз болатын автоматты басқару жүйесі қадағалау жүйесі деп аталады. Мұндай жүйелерде өлшенетін шамалардың кейбір функцияларын немесе өлшенетін шаманы берілген нақтылықпен жүргізу керек. Автоматты басқару жүйесіне кіретін контурлар санына байланысты бірконтурлы, көпконтурлы жүйелер болып бөлінеді. Қарапайым жүйе бір контур, бір тізбекке ие. Мұндай жүйелер бірконтурлы деп аталады. Ал күрделі жүйелерде сигнал бірнеше контур бойымен өтеді. Ондай жүйелерді көпконтурлы дейді. Жүйелер сигнал түрлеріне байланысты үздіксіз және дискретті болып бөлінеді. Егер әр буында уақыт бойынша кіріс шаманың үздіксіз өзгеруіне уақыт бойынша шығыс шамасы үздіксіз түрде өзгерсе,
онда жүйе үздіксіз әрекет жасайтын жүйе деп аталады. Егер жүйенің құрамында бір буында кіріс шамасы үздіксіз өзгерісі кезінде шығыс шамасы дискретті түрде өзгеретін болса, онда жүйе дискретті әрекет жасайтын жүйе болып табылады.
Жүйелер стационарды және стационарды емес болып бөлінеді. Уақыт бойынша өзгермейтін, яғни барлық параметрлері тұрақты болып қалатын жүйе стационарды деп аталады. Ал уақыт бойынша параметрлері өзгеретін жүйе стационарды емес жүйе деп аталады. АБЖ сызықты және сызықты емес болып бөлінеді. Сызықты АБЖ - барлық буындары сызықты теңдеулермен сипатталатын жүйе. Сызықты жүйелер суперпозиция принципіне бағынады. Сызықты емес АБЖ - ең болмағанда бір буында сипаттаманың сызықтылық қасиеті орындалмаса немесе теңдеуде сызықтылық қасиеті бұзылатын жүйе.
1. 2 Реттеуіштің функционалды сұлбасы
Реттелетін аймақ және автоматты реттеуіш автоматты реттеу жүйесін құрайды. Бір параметрді реттеуге арналған автоматты реттеу келесі негізгі элементтерден тұрады:
а) өлшейтін элемент;
б) тапсырма беруші құрылғы;
в) күшейткіш және түрлендіруші элементтер;
г) реттеуші элемент;
д) кері байланыс құрылғысы.
Автоматты реттеуіштің функционалды сұлбасы 1-суретте көрсетілген. Әсердің көзі болып кіріс әсерді х(t) салыстырушы элементке (СЭ) берілетін сигналға x (t) З түрлендіретін тапсырма беруші құрылғы табылады. Басты кері байланыс арқылы СЭ-ке пропорционал реттелетін шама y(t) сигналы y (t) КБ беріледі. СЭ - x x (t) y (t) ∆ = З − КБ есептеуін жүргізетін құрылғы. Бұл сигнал өлшейтін элементке беріледі.
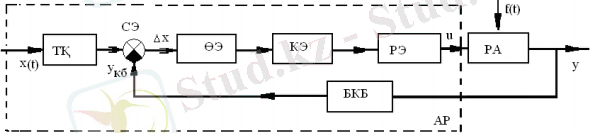
1-сурет - Автоматты реттеуіштің функционалды сұлбасы
Ары қарай сигнал түрлендіргіш-күшейткіш элементке беріледі. Күшейген сигнал реттелетін элементке барады. Реттелетін элемент реттелетін аймаққа берілетін басқарушы сигналды u(t) ретке келтіреді.
Өлшейтін элементке (ӨЭ) берілген мәнге байланысты реттелетін шаманың ∆x ауытқуын есепке алады.
Тапсырма беруші элемент - реттелетін шаманың белгілі бір мәнге келтіруге арналған құрылғы. Тапсырма беруші құрылғы өзі орындай береді немесе өлшенетін элемент құрылымына кіреді.
Алғашында өнеркәсіп саласында автоматты басқарушы құрылғы ретінде бу машинасын бумен қамтамасыз ететін, бу қазандарында су деңгейін реттейтін автоматты реттеуіштер болған. Алғаш рет орыс механигі Ползунов И. И. қолданды. Осындай түрдегі реттеуіштер тура әрекет реттеуіштері деп аталады.
Тура емес әрекет реттеуіші деп көздерден құралған (электр торабы, сорғы, компрессор) қосымша энергия түсетін күшейткіш немесе түрлендіргіш элементпен басқаратын сезімтал элементтің кіріс сигналы кезінде пайда болатын реттеу аймағында реттелетін параметрдің мәнінің өзгеруін айтады. Сондықтан күшейткіш элемент шығысындағы шығыс элемент кіріс сигналға қатысты күшейген дәрежеде болады. Күшейгіш элементтің шығысы күштік элементке (сондай-ақ күшейткіш қуат деп те аталады) әсер етеді. Реттегіштер үздіксіз және дискретті болады. Үздіксіз әрекет реттегіштері деп кіріс шама үздіксіз өзгергенде шығыс шама да үздіксіз өзгереді, яғни уақыт бойынша барлық шамалар үздіксіз өзгеретін реттеуіштер. Дискретті типтегі реттеуіштер жүйе элементтері арасында тұрақты байланысты емес, үзілмелі байланысты жүзеге асырады. Дискретті реттеуіштер дегеніміз кіріс шама үздіксіз өзгерген жағдайда шығыс шама дискретті түрде өзгереді, яғни шамалар импульс түрінде өңделеді.
1. 3 Статикалық және астатикалық реттеу
Нақтылықтың белгілі бір дәрежесінде реттелетін шама мәнін ұстап тұру үшін АРЖ қабілеттілігі бойынша астатикалық және статикалық реттеу жүйелері деп бөлінеді. Статикалық АРЖ жүйелері деп орнықты режимде (статикалық) сыртқы әсер ету кезінде, жүктемеге тәуелді болғанда реттеу қателігі бар жүйелерді айтады. Қателік неғұрлым көп болса, соғұрлым ауытқу да көп. Бұл реттеуіштің әрекет ету принципіне кіреді және оның шегі болмайды, сондықтан орын алатын ауытқу статикалық қателік немесе статизм деп аталады. Статикалық реттеуіш реттелетін шамаларды қателігімен бірге тұрақты мәнін ұстап тұрады.
Тұрақты түрде берілген мән кезінде қателігі жүктемеден тәуелді болатын реттеуді статикалық деп атайды. Кейбір жүйелерде реттеу кезінде статикалық қателігі нөлге тең болса, онда астатикалық реттеуге өтеді.
Реттеудің астатикалық автоматты жүйесі деп орнықты режимде кез келген тұрақты әсер ету кезінде реттеу қателігі нөлге тең болатын жүйелерді айтамыз. Астатикалық жүйеде статизм нөлге тең.
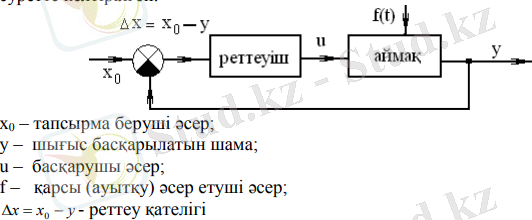
Автоматты реттеу жүйесінің қысқартылған функционалды сұлбасы 2- суретте келтірілген.
1. 4 тақырып. АРЖ жиілік сипаттамаларының графигін салу.
Автоматтық жүйелердің (үзбелердің) манызды сипаттамаларының бірі жиілік сипаттамалары. Жиілік сипаттамаларына амплитуда фаза жиілік (АФС), амплитуда жиілік (АЖС), фаза жиілік (ФЖС), логарифмді амплитуда жиілік (ЛАЖС), логарифмді фаза жиілік (ЛФЖС), нақты жиілік, жорамал жиілік сипаттамалары жатады. Оларды өрнек немесе график түрінде қөрсетеді. Осы сипаттамалар арқылы сызықты стационарлы және стационарлы емес жүйелердің негізгі қасиеттерін қөрсетуге болады.
- сурет. Жиілік сипаттамаларды табу схемасы
Сызықты жүйелер үшін суперпозиция принципі орындалады. Бұл принциптің мағынасы келесіде, бір мезгілдеғі бірнеше кіреберіс әсерлерғе жүйенің реакциясы әрі бір қарастырылған әсерлер кезіндегі жүйенің реакцияларының қосындысына тең.
Осы принциптең келесі тұжырым жасауға болады, бір кіреберіс әсері бар жүйені зерттеу жеткілікті екен.
Демек, сызықты үзбенің кіреберісіне гармоникалық әсер берілсін (сурет 15) :
 .
.
Оның шығаберісіндегі
 сигналдың амплитудасы кіреберіс сигналға қарағанда өзгереді.
сигналдың амплитудасы кіреберіс сигналға қарағанда өзгереді.
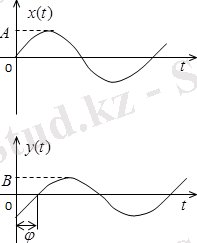
4 - сурет. Кіреберіс және шығаберіс сигналдары
Осыған қоса шығаберіс сигналдың кіреберіс сигналға қарағанда
φ
фазалық ығысуы пайда болады. Ал
 бұрыш жиіліктің мәні өзгермейді. Осыдан
шығаберіс сигнал келесі теңдемен жазылады:
бұрыш жиіліктің мәні өзгермейді. Осыдан
шығаберіс сигнал келесі теңдемен жазылады:
 .
.
Бұл сигналдардың графигі сурет 16 қөрсетіген.
Жалпы жағдайда бір кіреберісі бар сызықты стационарлы жүйесін келесі теңдеумен жазуға болады:
 .
.
Осындай үзбенің
 беріліс функциясы, анықтама бойынша, тең:
беріліс функциясы, анықтама бойынша, тең:
 .
.
Келесі
 ауыстырудан кейін
ауыстырудан кейін
 функциясын табуға болады:
функциясын табуға болады:

Табылған функцияны үзбенің жиілік беріліс функциясы деп атайды. Бұл нақты айнымалының
 бұрыш жылдамдығының комплексті мәнді функциясы
бұрыш жылдамдығының комплексті мәнді функциясы
Бұл
функцияны келесі түрде қөрсетуге болады:
 ,
,
мұндағы
 ,
,
 ,
,
 .
.
Соңғы (16) теңдеумен
 есептеғенде
есептеғенде
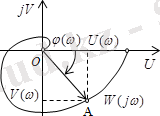
 мәні қосымша шарттардаң анықталады. Комплексті жазықтықта
мәні қосымша шарттардаң анықталады. Комплексті жазықтықта
 жиілік беріліс функциясы
жиілік беріліс функциясы
 векторын береді Бұл вектордың ұзындығы (модулі)
векторын береді Бұл вектордың ұзындығы (модулі)
 , ал аргументі (берілген вектормен нақты оңтаңбалы жартыосімен бұрышы)
, ал аргументі (берілген вектормен нақты оңтаңбалы жартыосімен бұрышы)
 тең болады (сурет ) .
тең болады (сурет ) .
Үзбенің амплитуда фаза жиілік сипаттамасы
Осы вектордың ұші жиілік нөльдең шексіздіққе шейін өзгергенде (кейбір жағдайларда
 басталып
басталып
 өзгереді) комплексті жазықтықта АФС қисығын сызып қөрсетеді.
өзгереді) комплексті жазықтықта АФС қисығын сызып қөрсетеді.
Жиілік беріліс функциясын амплитуда фаза жиілік функциясы деп атайды.
Осы функцияның нақты бөлігі
 және жорамал бөлігі
және жорамал бөлігі
 болып, олар нақты және жорамал жиілік функциялары деп аталады. Нақты жиілік функцияның
болып, олар нақты және жорамал жиілік функциялары деп аталады. Нақты жиілік функцияның
 графигі нақты жиілік, ал жорамал функцияның графигі
графигі нақты жиілік, ал жорамал функцияның графигі
 жорамал жиілік сипаттамалары деп аталады.
жорамал жиілік сипаттамалары деп аталады.
Табылған жиілік беріліс функциянығ
 модулі амплитуда жиілік функциясы, ал оның графигі АЖС деп атайды.
модулі амплитуда жиілік функциясы, ал оның графигі АЖС деп атайды.
Айтылған жиілік беріліс функцияынң аргументі
 фаза жиілік функциясы, ал оның графигі ФЖС деп аталады.
фаза жиілік функциясы, ал оның графигі ФЖС деп аталады.
1. 5 Автотты басқарудың радиоэлектронды жүйесінің классификациясы мен құрылымы
Автоматты басқару жүйесі бірнеше белгілер бойынша классификцияланады. Басқару әдісін таңдауға байланысты кері байланыс пен өздігінен бапталу жүйелерін қарастыруға болады. Өздігінен бапталу жүйесі өз ішінде экстремальды типті және эталонды модельге ие болып бөлінеді.
Басқару параметрлерінің санына байланысты бірөлшемді (бір басқаратын параметр), екіөлшемді (екі басқаратын параметр) және көпөлшемді (екіден көп басқаратын параметрлер) жүйелер бар. Бірнеше кері байланыстан тұратын автореттеу жүйесі көпбайланысты деп аталады.
Буындардың сипаттамаларына қатысты жүйенің сызықты және сызықты емес типтері бар. Бірінші жағдайда жүйеге кіретін барлық буындар сызықты болып табылады. Автоматты басқару жүйесінің құрамында кем дегенде бір элемент сызықты емес болса, онда бұл жүйе толығымен сызықты емес болып саналады.
Дабылдың түріне байланысты басқару тізбегінде үздіксіз және дискретті тізбектер қарастырылады. Дискретті жүйелер өз ішінде импульсті, релейлі және сандық болып бөлінеді.
Автоматты басқару жүйесін толығымен сипаттау үшін оның жоғарыда көрсетілген белгілер бойыншы төрт типі мен қолданылу аясын көрсету керек.
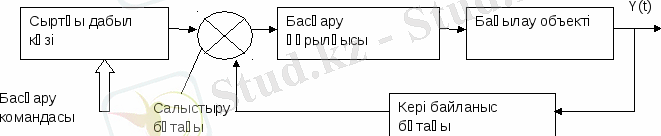
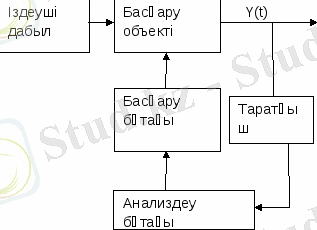
Жүйедегі басқару әдісімен байланысты бірінші белгіге қайта оралайық. Автоматты басқару жүйесінің бірінші түрі (кері байланыс) 1. 7, а-суретте көрсетілген. Жүйенің құрамына келесі негізгі буындар кіреді: сыртқы дабыл көзі; басқару объектінің өзі; кері байланыс тізбегі; салыстыру буыны мен басқару құрылғысы. Шығыс дабылы
 кері байланыс тізбегі бойынша салыстыру буынына келіп түседі. Бұл буынға талап ететін басқару заңын көрсететін кіріс дабылы
кері байланыс тізбегі бойынша салыстыру буынына келіп түседі. Бұл буынға талап ететін басқару заңын көрсететін кіріс дабылы
 да түседі.
да түседі.
Салыстыру жолымен қателік дабылы өңделеді ��(t)
 . Бұл дабыл басқару объектіне әсер етеді.
. Бұл дабыл басқару объектіне әсер етеді.
Автоматты басқару жүйесінің екінші түрі өздігінен бапталу деп аталады, және өз ішінен экстремальды мен эталонды модельге ие болып жіктеледі. Экстремальды тип жүйесінің жалпыланған құрылымдық сұлбасы 1. 7, б-суретте көрсетілген. Ол кейбір параметрлердің максимум мен минимумын алу үшін негізделген. Мысалы, радиотелескоп антеннасын дабылдың максимумын алу мақсатында космостық сәулелену көзіне автоматты баптау керек. Ол үшін жүйеге қосымша іздеуші дабыл енгізіледі және жүйе реакциясы бойынша бұл дабыл басқару дабылын өңдейді. Бұл үрдіс күшейткіш шығысында дабыл амплитудасының максималды мәні қабылданбайынша жалғасады.
Эталонды модельге ие жүйеде басқару объектісінің параметрлері эталонды модел параметрлерімен сәйкес келуі үшін автоматты баптау іске асырылады (1. 7, в-сурет) . Мұнда іздеуші дабыл басқару объектіне сияқты, эталонды модельге де әсер етеді.
Жүйені классификациялаудың екінші белгісін қарастырайық. Атап айтқанымыздай бұл белгі басқарылатын параметрлерге байланысты бірөлшемді, екіөлшемді және көпөлшемді болып жіктеледі.
Автоматты басқарудың бірөлшемді жүйесіне 1. 7-суретте көрсетілгендер жатады. Мұнда басқарылатын бір параметр ғана бар y(t) . Ал екіөлшемді жүйенің мысалы 1. 9, а-суретінде көрсетілген. Жүйе өзара байланысты кері байланысқа ие екі басқарылатын каналдан тұрады. Сонымен қоса, бірінші канал екіншіге, ал екіншісі біріншіге әсер етеді. Нәтижесінде шығыс дабылдары бір-біріне тәуелді болады. Бұл тәуелділікті жүйені талдау кезінде ескеру керек.
Көпөлшемді жүйе екі каналдан көп өзара байланысқан каналдарды басқаратын күрделі жүйе (1. 9, б-сурет) . Автоматты басқарудың көпөлшемді жүйесі өзара байланысқан өлшеуші, атқарушы, фильтрлеуші, дифференциалдаушы, интегралдаушы, басқарушы және басқа да буындардың көп санының жиынтығынан тұрады. Мысал ретінде, берілген траекторияны, ұшудың жылдамдығы мен биіктігін, самолеттің ұшуы мен қонуын және басқа да функцияларын қамтамасыз ететін автопилотты айтуға болады.
Көпөлшемді жүйені талдау. Сызықты модель жағдайында мұндай талдаудың негізі болып n сызықты дифференциалдық теңдеуден тұратын жүйе нәтижесі саналады, ал сызықты емес модель - n сызықты емес
дифференциалдық теңдеулерден тұратын жүйе.
Бірконтурлы мен екіконтурлы автоматты басқару жүйесін талдау кезінде оның жұмысын талдау үшін скалярлы типтегі құрылымдық сұлба қолданылады. Ал көпөлшемді жүйеде, оның жоғарыөлшемдігін, байланыстарының көптігін санағанда, мұндай скалярлы сұлбалар үлкен көлемді әрі түсініксіз болып көрінеді. Сондықтан, көпөлшемді жүйе жағдайында скалярлы түрден векторлықөа ауысқан жөн. Векторлар мұндай құрылымдық сұлбаларда теңдеулердегі сияқты белгіленулерге ие болады. Құрылымдық векторлық сұлбаның екі мысалы 1. 8-суретте көрсетілген.

1. 8-сурет
Автоматты басқару жүйесінің сызықты және сызықты еместігімен байланысты келесі белгісін қарастырамыз. Олардың жалпы айырмашылығына тоқтап өтсек, сызықты буын жұмысы сызықты алгебралық немесе дифференциалдық теңдеумен сипатталады, ал сызықты емес сызықты емес теңдеулермен.
ІІ Бөлім
2. 1 Автоматты басқарудың ішкіаппаратуралық радиоэлектронды жүйелері
Ішкіаппаратуралық жүйелерге жататындар:
- жилікті автоматты орнату жүйесі;
- көптеген дабылдар фазаларының фронтымен автоматты басқару жүйесі;
- жоғары жилікті күшейткіштер контурларын автоматы баптау жүйесі;
- сәйкес келетін құрылғыларды автоматты баптау жүйесі;
- модуляция параметрлерін автоматты реттеу жүйесі;
- жоғары жилікті күшейткіштердің сызықты емес сипаттамаларын автоматты линеаризациялау жүйесі;
- жоғары жилікті күшейткіштердің күшею коэффициентін автоматты реттеу жүйесі;
- тұрақты кернеу мен тоқты автоматты тұрақтандыру жүйесі.
Аталған автоматты басқару жүйелерінің ішіндегі маңыздыларының жұмыс істеу принциптеріне қысқаша тоқталып өтейік.
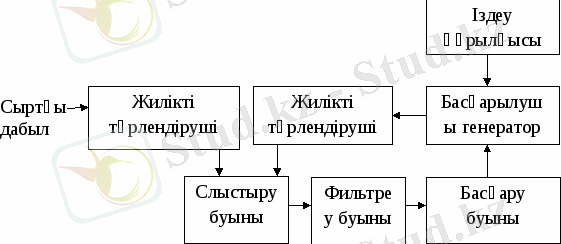
1. 2. 1 Жилікті автоматты орнату жүйесі. Жилікті автоматты орнату құрылғысы автогенератор жилігін ішкі дабыл бойынша басқару және тұрақтандыру мақсатында қызмет етеді. Басқаша айтқанда, басқарылушы немесе тұрақтандырылушы автогенератор жилігінің f ст (t) өзгеру заңы тура дәлдікпен сыртқы эталондық дабыл жилігінің f эт (t) өзгеру заңына сәйкес келуі керек.
Жилікті автоматты орнату құрылғысының жалпыланған құрылымдық сұлбасы 1. 6-суретте көрсетілген. Сұлбада сыртқы эталон жилігі мен басқарушы автогенератордан түскен дабыл жилігі салыстырылған, және осы салыстыру нәтжесінде дабыл қателігі табылады. Фильтрленгеннен кейін бұл дабыл автогенератормен басқарылады. Сонымен қатар, автоматты орнату құрылғысы сұлбасында автоматты реттеу режимі кезінде жүйеге кіруді іске асыратын іздеу құрылғысы да болуы мүмкін.
Буындардың жалпы сипаттамасы
Автоматикалық басқарудың жүйесі бөлек өзара жалғанған буындар мен каскадтардан тұрады. Осындай буындардың әрбірінде аты бар, белгілі бір қызметтік міндеттері болады.
Буындар сызықты және сызықты емес, инерционды және инерционсыз, аналогтық және дискретті болып бөлінеді. Автоматикалық басқарудың радиоэлектронды жүйелерінде радиотехникалық құрылғыларға сәйкес буындар жиыны қолданылады, олар: жоғары жиілікті және тұрақты токты күшейіткіштері автогенераторлар, модуляторлар және демодуляторлар, фильтрлер, сонымен қатар төмен жиілікті, қосқыштар және дабыл ажыратқыштар, жиілік ауыстырғыштар және түрлендіргіштер, жиіліктік, фазалық және бұрыштық дискриминаторлар, дабылдың жиілігін, фазасы және амплитудасын басқаратын құрылғылар, дабыл тоқтатқыш желілер, параметрлерді өлшейтін барлық сезбек: релейлі, импульсті, сандық.
Бұндай буындардың әрбіреуінің жұмыс талдауы оған сәйкес, дифференциялдық теңдеумен сипатталатын, модельдің негізінде, сонымен қатар белгілі бір параметрлер, сипаттамалар және графиктер жиының көмегімен жүзеге асырылады:
- таралу коэффициенті жәен таралатын функция;
- буынның жиіліктік қасиеттерін анықтайтын амплитудалық және фаза-жиіліктік сипаттамалар;
- буынның уақыттық қасиеттерін анықтайтын өтпелі және импульстік сипаттамалар;
- буынның сызықтық емес қасиеттерін анықтайтын амплитудалық және импульстік сипаттамалар;
- кірістік әсердің мүмкңн болатын динамикалық диапозоны.
2. 2 Қателік дабылын өңдіретін буындар
Кез келген автоматты басқару жүйелердің құрамына қателік дабылын өңдіретін буындар болады. Олардың екі түрін ажыратқан жөн.
Бірінші типті буында екі кіріс және бір шығыс болады (3. 1-сурет) . Бұл буынның бірінші кірісінде U p (t) дабылы беріледі. Ал бұл дабыл басқарылатын объекттің шығысындағы дабылына U p (t) = R 1 y об (t) пропорционал болады; ал екінші кірісі - U э (t) = k 2 y эт (t), ол объекттің басқару талап етілетін заңмен анықталады. Екінші дабылды тапсырылған не эталонды деп атайық.
... жалғасыСіз бұл жұмысты біздің қосымшамыз арқылы толығымен тегін көре аласыз.
- Іс жүргізу
- Автоматтандыру, Техника
- Алғашқы әскери дайындық
- Астрономия
- Ауыл шаруашылығы
- Банк ісі
- Бизнесті бағалау
- Биология
- Бухгалтерлік іс
- Валеология
- Ветеринария
- География
- Геология, Геофизика, Геодезия
- Дін
- Ет, сүт, шарап өнімдері
- Жалпы тарих
- Жер кадастрі, Жылжымайтын мүлік
- Журналистика
- Информатика
- Кеден ісі
- Маркетинг
- Математика, Геометрия
- Медицина
- Мемлекеттік басқару
- Менеджмент
- Мұнай, Газ
- Мұрағат ісі
- Мәдениеттану
- ОБЖ (Основы безопасности жизнедеятельности)
- Педагогика
- Полиграфия
- Психология
- Салық
- Саясаттану
- Сақтандыру
- Сертификаттау, стандарттау
- Социология, Демография
- Спорт
- Статистика
- Тілтану, Филология
- Тарихи тұлғалар
- Тау-кен ісі
- Транспорт
- Туризм
- Физика
- Философия
- Халықаралық қатынастар
- Химия
- Экология, Қоршаған ортаны қорғау
- Экономика
- Экономикалық география
- Электротехника
- Қазақстан тарихы
- Қаржы
- Құрылыс
- Құқық, Криминалистика
- Әдебиет
- Өнер, музыка
- Өнеркәсіп, Өндіріс
Қазақ тілінде жазылған рефераттар, курстық жұмыстар, дипломдық жұмыстар бойынша біздің қор #1 болып табылады.

Ақпарат
Қосымша
Email: info@stud.kz